Programmable merupakan suatu bentuk khusus pengontrol berbasis- mikroprosesor yang dapat diprogam untuk menyimpan instruksi-instruksi, mengimplementasikan fungsi-fungsi semisal logika, sequencing, pewaktuan (timing), pencacahan (counting) dan aritmatika, yang digunakan untuk mengontrol mesin-mesin pabrik secara otomatis. PLC ini dirancang sedemikian rupa agar tidak hanya progammer komputer saja yang dapat membuat atau mengubah program-progamnya. Oleh karena itu, para perancang PLC telah menempatkan sebuah program awal di dalam PLC tersebut (pre-progam) yang memungkinkan program-progam kontrol dimasukkan dengan menggunakan suatu bentuk bahasa pemograman yang sederhana.
PLC memiliki keunggulan yang signifikan, karena sebuah perangkat komputer yang sama dapat dipergunakan dalam beraneka ragam sistem kontrol.
Untuk memodifikasi sebuah sistem kontrol dan aturan-aturan pengontrolan yang dijalankannya, seorang operator hanya memasukkan seperangkat instruksi yang berbeda dari yang digunakan sebelumnya. Penggantian rangkaian kontrol tidak perlu dilakukan. Hasilnya adalah sebuah perangkat yang fleksibel dan hemat biaya yang dapat dipergunakan dalam sistem-sistem kontrol yang sifat dan kompleksitasnya sangat beragam.
PLC serupa dengan komputer namun, komputer dioptimalkan untuk tugas-tugas perhitungan dan penyajian data, sedangkan PLC dioptimalkan untuk
3. Mudah diprogram dan menggunakan sebuah bahasa pemrograman yang mudah dipahami, yang sebagian besar berkaitan dengan operasi-operasi logika dan penyambungan (switching).
Perangkat PLC pertama dikembangkan pada tahun 1969. Saat ini, PLC telah dikembangkan dalam sistem modular yang dapat menangani input/output dalam jumlah besar dan dalam bentuk sinyal analog maupun digital.
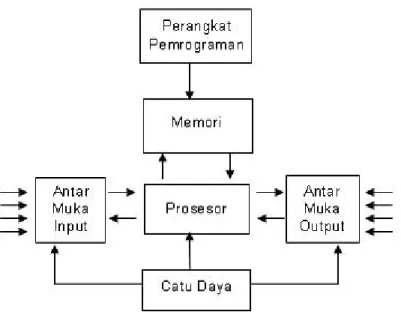
Gambar 2.1. Sistem PLC
Sumber: Bolton, William, Programmable Logic Controller (PLC) Sebuah Pengantar (3rd edition). Jakarta: Erlangga, p. 4
Pada umumnya, sebuah sistem PLC memiliki lima komponen dasar, yaitu:
1. Unit prosesor atau central processing unit (unit pengolahan pusat) (CPU) adalah unit yang berisi mikroprosesor yang menginterpretasikan sinyal-sinyal input dan melaksanakan tindakan-tindakan pengontrolan, sesuai dengan program yang tersimpan di dalam memori, lalu mengkomunikasikan keputusan-keputusan yang diambilnya sebagai sinyal-sinyal kontrol ke antarmuka output.
2. Unit catu daya diperlukan untuk mengkonversikan tegangan AC sumber menjadi tegangan rendah DC (5V & 24V) yang dibutuhkan oleh prosesor dan rangkaian-rangkaian di dalam modul-modul antar muka input dan output.
4. Unit memori adalah tempat program, yang digunakan untuk melaksanakan tindakan-tindakan pengontrolan oleh mikroprosesor disimpan.
5. Bagian input dan output adalah antarmuka tempat prosesor menerima informasi dari dan mengkomunikasikan informasi kontrol ke perangkat- perangkat eksternal. Sinyal-sinyal input dapat berasal dari saklar-saklar, sensor-sensor lain, seperti misalnya sel-sel fotoelektrik, sensor suhu atau sensor aliran cairan, dsb. Sinyal-sinyal output mungkin diberikan pada kumparan-kumparan starter motor, katup-katup, selenoid, dll. Ada dua tipe I/O pada PLC yaitu I/O digital dan I/O analog. Pada I/O digital, input dan output-nya dapat menerima dan menghasilkan sinyal digital yang berbentuk data biner ‘1’ dan ‘0’ atau kondisi ‘on-off’, sebagai contoh, saklar on-off sebagai input digital dan output-nya mengontrol on-off selenoid. Sedangkan, pada I/O analog, input atau output-nya dapat menerima dan menghasilkan sinyal analog yang tidak hanya ‘on-off’ saja, sebagai contoh, sensor suhu yang dapat mengukur suhu dengan range tertentu sebagai input analog, dan pengontrolan kecepatan motor DC dengan menggunakan output analog dengan mengubah-ubah nilai tegangan output.
2.1.1. Bahasa Pemrograman PLC
1. Ladder Logic: PLC yang pertama telah diprogramkan dengan suatu teknik yang telah didasarkan pada pemasangan relay menggunakan kabel menurut skematiknya. Hal ini menghilangkan kebutuhan untuk mengajar tukang listrik,
3. Sequential Function Charts (SFC): SFC telah dikembangkan untuk mengatasi pemrograman yang lebih mengedepankan sistem. Ini serupa dengan flowchart, tetapi jauh lebih kuat.
4. Structured Text (ST): pemrograman telah dikembangkan sebagai bahasa program lebih modern. Hal ini adalah serupa ke bahasa program seperti BASIC atau PASCAL.
5. Grafcet language: bahasa ini digunakan untuk mewakili sebuah operasi sequential automatic system dalam sebuah bentuk struktur dan grafik.
2.1.2. Sourcing dan Sinking
Istilah sourcing dan sinking digunakan untuk mendeskripsikan cara penghubungan perangkat-perangkat DC ke PLC. Sourcing dan sinking ditentukan berdasarkan arah arus.
Gambar 2.2. Sourcing
Dinamakan metode sourcing (gambar 2.2. (a)) jika module input PLC tersebut digunakan sebagai sumber, yang artinya module input memberikan arus ke perangkat input. Untuk metode sinking (gambar 2.3 (a)), jika modul input menerima arus dari perangkat input.
Gambar 2.3. Sinking
Jika sebuah module output memberikan arus ke perangkat output, maka module output berfungsi sebagai sumber (gambar 2.2. (b)). Apabila module output menerima arus dari perangkat output maka module output berfungsi sebagai sinking (gambar 2.3. (b))
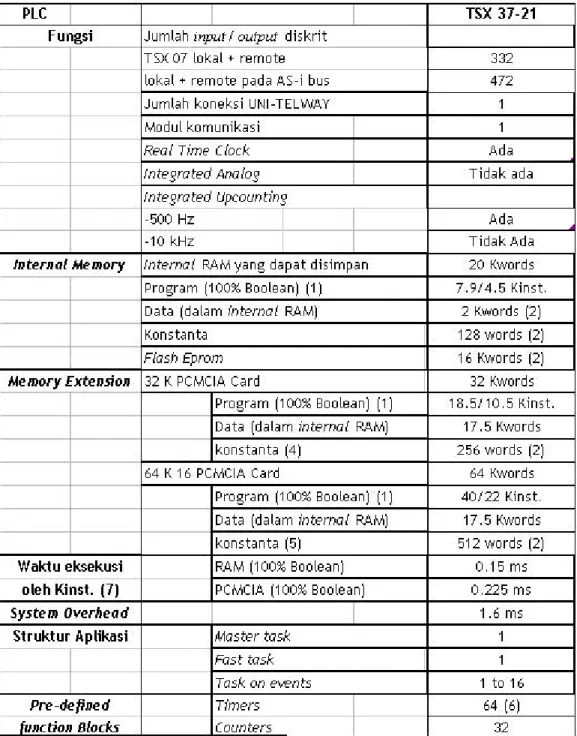
built-in slot, dan 2 lainnya sebagai expansion slot. Semua rak yang disediakan bisa dipasangkan dengan I/O module discrete maupun analog. Khusus untuk rak yang pertama hanya bisa digunakan untuk I/O module discrete dan untuk rak yang lainnya untuk I/O module discrete maupun analog. PLC tipe ini memiliki I/O maksimum sebanyak 256, jika sebuah mini rack ditambahkan. Tegangan supply yang dibutuhkan adalah 24 V DC atau 100 – 240 V AC. Untuk melakukan programing dilakukan dengan menggunakan PL7 software.
.
Gambar 2.4. PLC TSX Micro 37-21 Dengan Mini Rack Tambahan Sumber : TSX Micro PLCs : TSX 3705/3708/3710/3720 Implementation Manual Volume 1, Jakarta: Schneider, 2005, p.18
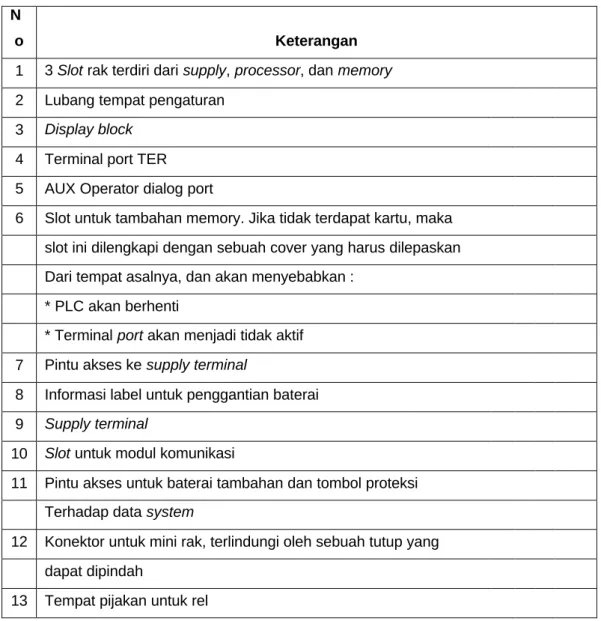
Description PLC TSX Micro 37-21:
Tabel 2.1. Description Bagian Dari PLC TSX Micro 37-21
N
o Keterangan
1 3 Slot rak terdiri dari supply, processor, dan memory 2 Lubang tempat pengaturan
3 Display block 4 Terminal port TER 5 AUX Operator dialog port
6 Slot untuk tambahan memory. Jika tidak terdapat kartu, maka slot ini dilengkapi dengan sebuah cover yang harus dilepaskan Dari tempat asalnya, dan akan menyebabkan :
* PLC akan berhenti
* Terminal port akan menjadi tidak aktif 7 Pintu akses ke supply terminal
8 Informasi label untuk penggantian baterai 9 Supply terminal
10 Slot untuk modul komunikasi
11 Pintu akses untuk baterai tambahan dan tombol proteksi Terhadap data system
12 Konektor untuk mini rak, terlindungi oleh sebuah tutup yang dapat dipindah
13 Tempat pijakan untuk rel
Sumber : TSX Micro PLCs : TSX 3705/3708/3710/3720 Implementation Manual Volume 1, Jakarta: Schneider, 2005, p.67
PLC TSX 37-21
I/O Jumlah I/O Base 192
Diskrete
Maksimum Base + Extension 256
Base + Extension + Remotes (TSX
07) 332
Base + Extension + Remotes (AS-I
Bus) 472
Remote (4 TSX 07) 96
Remote dalam AS-I Bus (124I+1240) 248 Jumlah Module 28 atau 32 Discrete Inputs/Outputs 5
Maksimum 64 Discrete Inputs/Outputs 3
Mismatch Input/Output (Untuk TSX 07
I/O atau AS-I Bus) 1
Analog Input/Output Analog Maksimum 4
Input Analog Maksimum dalam rack 32
Output Analog Maksimum dalam rack 16
Built-In Input Analog Maksimum dalam rack -
Built-In Output Analog Maksimum -
Counting Counting 500 Hz Channels pada diskrete Input Maksimum 2 Counting Module (dalam PLC) Maksimum (1) 4 Counting 40 kHz dan/atau 500 kHz Channels Maksimum 7
Built-In Counting Channels Maksimum -
Communicatio
Tabel 2.3. Karakteristik TSX Micro 37-21
Sumber : TSX Micro PLCs : TSX 3705/3708/3710/3720 Implementation Manual Volume 1, Jakarta: Schneider, 2005, p.68
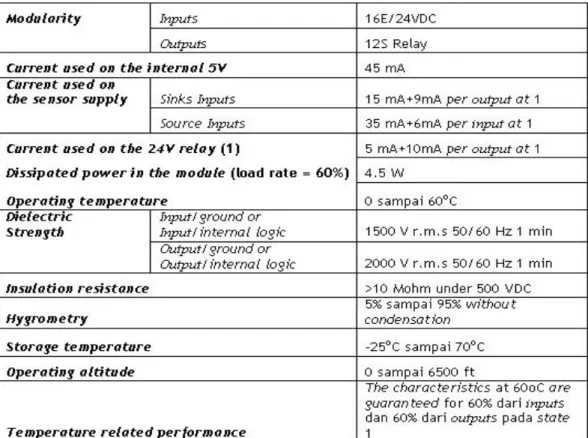
TSX DMZ 28DR adalah module yang terdiri dari input discrete dan output discrete.
Gambar 2.6. TSX DMZ 28 DR
Sumber : TSX Micro PLCs : TSX 3705/3708/3710/3720 Implementation Manual Volume 2, Jakarta: Schneider, 2005, p.106
Berikut ini adalah karakteristik umum dari TSX DMZ 28 DR:
Tabel 2.4. General Characteristic TSX DMZ 28DR
Sumber : TSX Micro PLCs : TSX 3705/3708/3710/3720 Implementation Manual Volume 2, Jakarta: Schneider, 2005, p.109
2.2.1.1. Input Module TSX DMZ 28DR
Input module dari TSX DMZ 28DR memiliki dua karakteristik, yaitu bisa dipasang sebagai input singking atau juga sebagai input sourcing. Untuk memilih salah satu kondisi tersebut dilakukan dengan cara merubah posisi jumper yang terpasang dalam rangkaian module-nya.
Tabel 2.5. Characteristics of the 24VDC Inputs TSX DMZ 28DR
Sumber : TSX Micro PLCs : TSX 3705/3708/3710/3720 Implementation Manual Volume 2, Jakarta: Schneider, 2005, p.110
Dibawah ini adalah terminal input module TSX DMZ 28DR :
Gambar 2.7. Terminal Input Module TSX DMZ 28DR
Sumber : TSX Micro PLCs : TSX 3705/3708/3710/3720 Implementation Manual Volume 2, Jakarta: Schneider, 2005, p.113
Jika terminal input module TSX DMZ 28DR dalam posisi sink maka common dari input module diberi ground. Begitu juga sebaliknya jika dalam posisi source maka common dari input module diberi +24V
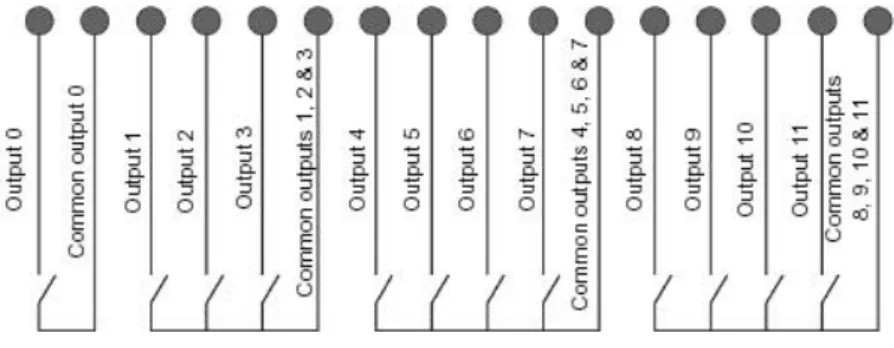
2.2.1.2. Output Module TSX DMZ 28DR
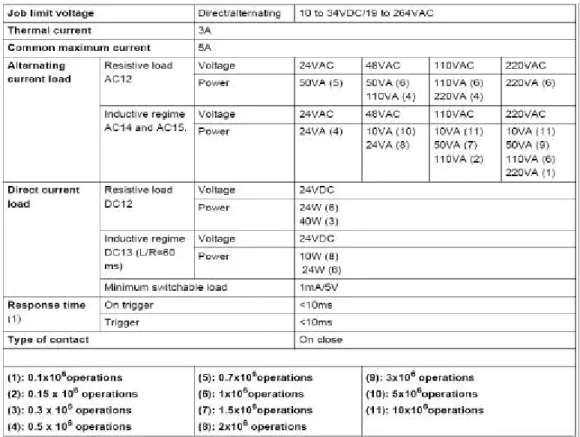
Output module dari TSX DMZ 28DR adalah relay output dengan 4 buah common. Berikut ini adalah karakteristik relay output-nya:
Tabel 2.8. Characteristics of the Relay Outputs
Sumber : TSX Micro PLCs : TSX 3705/3708/3710/3720 Implementation Manual Volume 2, Jakarta: Schneider, 2005, p.111
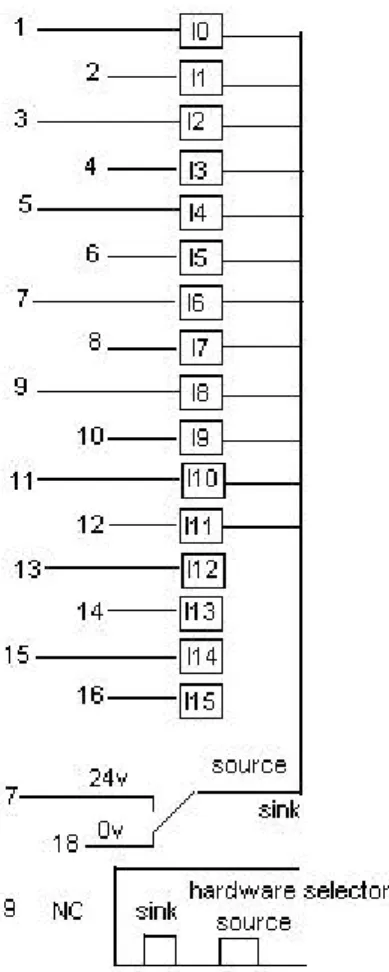
Dibawah ini adalah terminal output TMZ 28DR yang terdiri dari 12 relay output 240 VAC atau 24 VDC
Gambar 2.8. Terminal Output Module TSX DMZ 28DR
Sumber : TSX Micro PLCs : TSX 3705/3708/3710/3720 Implementation Manual Volume 2, Jakarta: Schneider, 2005, p.108
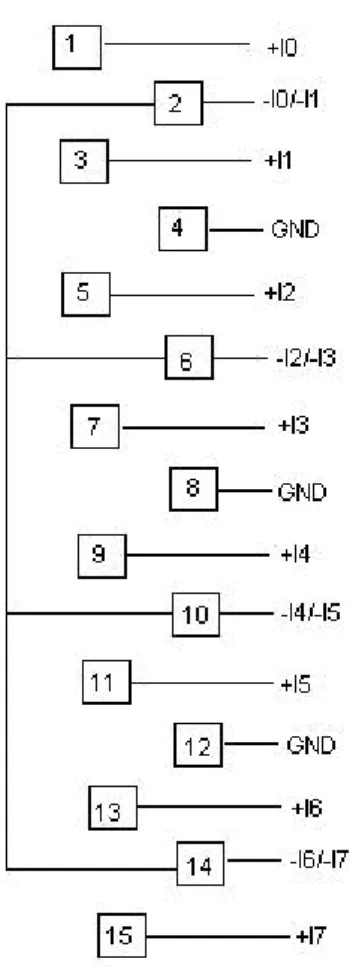
2.2.1. TSX AEZ 801
Input module analog TSX AEZ 801 mempunyai 8 high level analog inputs dengan titik ground. TSX AEZ 801 juga mempunyai range antara -10 V sampai dengan + 10 V atau range antara 0 – 10 V, tergantung dari konfigurasi yang akan dibuat
Gambar 2.9. Analog Input TSX AEZ 801
Sumber : TSX Micro PLCs : TSX 3705/3708/3710/3720 Implementation Manual Volume 3, Jakarta: Schneider, 2005, p.28
Tabel 2.7. Karakteristik TSX AEZ 801
Module TSX AEZ 801
Jumlah Channel 8
Analog/Digital Conversion
12 bits (4096 pin) successive approximation
Acquisition Cycle Time
Normal
Cycle 32 ms Quick
Cycle
4 ms x number of channels used
Digital filtering
1st order. Configurable time constant
Hardware filtering #33Hz cut-off rate
Insulation between channels and
ground 1000 veff
Insulation between channels shared pulse Insulation between bus and
channels 1000 veff
input impedance 22 Mohm
Max Voltage surge authorized on
the inputs +- 30 V direct
Norms
IEC 1131-DIN43760-UL508- IEC584
ANSI MC96.1-NF C 42-330
Electric Range +- 10 V
Full scale (FS) 10V
Resolusi 6 mV (3800 pulses)
Max Error at 25oC 0.16%PE = 16 mV
Max Error on the scale at 60oC 0.46 % PE = 46 mV
Electric Range 0-10 V
Full scale (FS) 10 V
Resolusi 6 mV (1900 pulses)
Max Error at 25oC 0.1%PE = 10 mV
Max Error on the scale 0oC to
60oC 0.46%PE = 46 mV
Maximum temperature deviation 0.068% / 10oC
Sumber : TSX Micro PLCs : TSX 3705/3708/3710/3720 Implementation Manual Volume 3, Jakarta: Schneider, 2005, p.36
Gambar 2.10. Terminal Analog Input TSX AEZ 801
Sumber : TSX Micro PLCs : TSX 3705/3708/3710/3720 Implementation Manual Volume 3, Jakarta: Schneider, 2005, p.108
2.2.3. PL7 Software
Secara umum fungsi dari PL7 software digunakan untuk mendesain dan juga mengatur aplikasi untuk Micro dan Premium PL7s. Tiga tipe dari PL7 software yaitu PL7 Micro, PL7 Junior, PL7 Pro. PL7 software mempunyai lima bahasa pemograman:
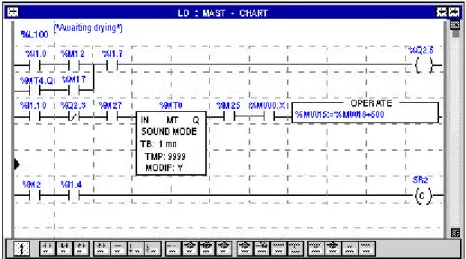
1. Ladder : Ladder (LD) adalah graphic language. Ladder ini digunakan untuk mengubah diagram ke dalam bentuk relay.
Gambar 2.11. Ladder Diagram
Sumber : Schneider. PL7 Pro (Version 4.4) [Computer software], 2005, Germany 2. Instruction list language : Instruction list language (IL) adalah Boolean
“machine” language yang digunakan untuk menulis proses logic dan numeric.
Gambar 2.12. Instruction List Language
Sumber : Schneider. PL7 Pro (Version 4.4) [Computer software], 2005, Germany 3. Structured text language : Structured text language (ST) hampir sama dengan
tipe pemograman “IT” yang digunakan untuk menulis structured proses logic dan numeric.
Gambar 2.13. Structured Text Language
Sumber : Schneider. PL7 Pro (Version 4.4) [Computer software], 2005, Germany 4. Grafcet language: bahasa ini digunakan untuk mewakili sebuah operasi
sequential automatic system dalam sebuah bentuk struktur dan grafik.
Gambar 2.14. Grafcet Language
Sumber : Schneider. PL7 Pro (Version 4.4) [Computer software], 2005, Germany
Gambar 2.15. Sequential Function Charts
Sumber : Schneider. PL7 Pro (Version 4.4) [Computer software], 2005, Germany
2.2.3.1. PL7 Pro V4.4
Software PL7 Pro V4.4 yang digunakan untuk dapat menuliskan sebuah pemograman di dalam PLC TSX Micro 3721. Berikut ini adalah tampilan utama dari software PL7 Pro V4.4:
Gambar 2.16. PL7 Pro Main Screen
Gambar 2.17. PL7 Pro File Menu
Gambar 2.19. PL7 Pro PLC Menu 1. Langkah-langkah menggunakan software PL7 Pro V4.4:
• Select menu “file” pada tampilan utama selanjutnya pilih new maka akan muncul tampilan seperti berikut:
Gambar 2.20. PL7 Pro PLC
• Setelah dikonfigurasi PLC apa yang akan digunakan, maka akan muncul tampilan seperti berikut:
Gambar 2.21. PL7 Pro PLC
• Select folder configuration selanjutnya pilih folder hardware “configuration”, maka akan muncul tampilan sebagai berikut
• Selecting modules dengan cara double click pada “rack position” untuk mengkonfigurasi
Gambar 2.23. PL7 Pro PLC
• OK jika module sudah dikonfigurasi.
Gambar 2.24. PL7 Pro PLC
• Memilih bahasa pemograman yang akan digunakan dengan cara double click pada MAST Task pilih “section”, selanjutnya click kanan pada “section” dan pilih create, bahasa pemograman dapat memilih dalam bentuk Ladder,
Gambar 2.25. PL7 Pro PLC 2. Transfer data (progam) PLC ke PC atau PC ke PLC
• Select menu PLC (Connect)
• Selanjutnya transfer data dari PLC ke PC atau PC ke PLC click OK
Gambar 2.27. Transfer Data
3. Tampilan (display) dengan menggunakan animation tables
• Memilih folder animation tables
Gambar 2.28. PL7 Pro PLC Menu
Gambar 2.29. PL7 Pro PLC Menu
• Isi address yang akan dilihat nilainya
• Display current value dari “animation tables” ini dalam bentuk decimal, biner, hexa.
4. Tampilan (display) dengan menggunakan “Runtime screen”
• Memilih folder Runtime screen
Gambar 2.30. PL7 Pro PLC Menu
• Klik kanan pada folder “runtime screen” dan pilih “open”
Gambar 2.31. PL7 Pro PLC Menu
Gambar 2.32. PL7 Pro PLC Menu
• Pilihlah display dalam bentuk, misalnya: “display unit dynamic”
• Selanjutnya gambar display tersebut di-copy ke screen
Gambar 2.34. PL7 Pro PLC Menu
• Klik kanan pada gambar tersebut dan pilih properties maka akan muncul 4 object properties yaitu “animation, animation type, drawing, text”. Fungsi dari 4 object tersebut:
- Animation : digunakan untuk mengisi addrees yang akan di monitoring nilainya
- Animation type : memberikan value dalam bentuk apa
- Drawing : digunakan untuk mengganti gambar warna dari background - Text : yang digunakan untuk mengubah text sesuai dengan keinginan kita.
Gambar 2.35. PL7 Pro PLC Menu
2.3. Tranducer
Transducer adalah suatu peralatan yang mengubah parameter fisik non elektris ke dalam bentuk sinyal listrik yang sebanding dengan nilai dari parameter fisik yang diukur. Parameter fisik tersebut dapat berupa panas tekanan, suara, dan lain-lain, sedangkan keluaran dari transducer tergantung pada prinsip dasar pembuatan, dapat berupa tegangan, arus, resistansi, kapasitansi, ataupun frekuensi.
Bersamaan dengan perkembangan teknologi, maka transducer digunakan untuk mengukur tekanan, daya, kecepatan dan percepatan, aliran, suara, berat, temperature, serta parameter kimia seperti tekanan parsial, impedansi dan lain-
Contoh: photoresistor, transducer ini akan mengalami perubahan tahanan, jika terkena energi.
Menurut studi Perencanaan dan pembuatan timbangan digital untuk kantor pos dengan menggunakan MCS-51 (Range 5gr-2kg), Alexandra (1993, p. 10-13), beberapa parameter penting yang perlu diperhatikan dalam proses operasi suatu transducer adalah:
1. Prinsip operasi yang dipakai.
2. Tegangan dan arus eksternal yang dikenakan pada transducer, agar dapat berfungsi dengan baik.
3. Keluaran elektrikal dari transducer.
4. Accuracy, resolution dan linearity dari transducer.
5. Repeability dari transducer.
6. Stability transducer pada operasi dan penyimpanan.
7. Reliability dari transducer, misal jika terjatuh maka transducer tersebut tidak mudah rusak.
8. Rating transducer.
2.3.1. Force Transducer
Di dalam proses kontrol pengukuran gaya sangat penting. Pengukuran gaya yang akurat dapat memberikan harga parameter secara tidak langsung, tetapi untuk pengukuran secara langsung sulit didapat. Gaya merupakan ukuran dari banyaknya material yang diberikan (massa). Jadi force transducer dapat digunakan untuk mengukur berat dan jumlah material di dalam sebuah tank (level). Tekanan merupakan parameter kunci pneumatic dan hydraulics. Jadi teknik pengukuran gaya sering digunakan untuk mengukur tekanan.
Gambar 2.36. Gaya Yang Bekerja Apabila Pelat Mendapat Bending Akibat Beban Sumber : Sutrisno. Fisika Dasar: mekanika, Bandung: ITB, 1977, p.40
Jadi dapat disimpulkan bahwa gaya yang timbul akibat dari beban diberikan adalah
F = w (2.1) Rumus dari:
F = ma (2.2) Keterangan:
F = Gaya (Newton) m = Massa (kg) a = Percepatan (m/s2) Sedangkan
w = mg (2.3) w = Berat (kgf)
m = Massa (kg) g = Gravitasi (m/s2)
Beban yang diberikan pada pelat juga mengakibatkan defleksi (penurunan)
E = Modulus elastisitas bahan ( 2 cm
kg )
I = Momen inersia (cm4) Dengan:
I = 12
1 B H3 (2.5)
I = Momen inersia (cm4) B = Lebar pelat (cm) H = Tinggi pelat (cm)
2.3.2. Strain (regangan)
Ketika gaya bekerja pada penyangga atau penopang (pelat), penyangga atau penopang (pelat) tersebut mengalami perubahan. Secara umum semua informasi tersebut dinamakan strain. Strain (regangan) juga dapat didefinisikan banyaknya perubahan bentuk per unit panjang dari object ketika diberi beban.
Strain dapat juga didefinisikan sebagai tensile (positive) atau compressive (negative). Strain dapat dihitung dengan cara:
ε
=L
∆L
(2.6)
ε
= StrainL = Total dari perubahan panjang sebenarnya (mm) L = Panjang sebenarnya (cm)
Dapat dilihat strain adalah sebuah perbandingan dari dimensionless. Satuan dari strain sering ditulis dalam bentuk inch/inch. Di dalam percobaan beberapa logam ukuran strain bekerja kurang lebih 0.005000 inch/inch. Jadi nilai praktis dari strain itu kecil yaitu dalam microstrain, dimana
ε
x 106 dan mempunyai symbol ìε
.Contohnya : 0.005 inch/inch = 5000 ì ª
Gambar 2.38. Hubungan Strain Jika Gaya Bekerja
Sumber : Jacob, J Michael. Industrial Control Electronic Application and Design, Eaglewood Cliffs, New Jersey: Prentice-Hall,1998, p.111
Gambar 2.39. Cantilever In Bending
Sumber : Jacob, J Michael. Industrial Control Electronic Application and Design, Eaglewood Cliffs, New Jersey: Prentice-Hall,1998, p.111
2.3.3. Strain Gages
Pada dasarnya, semua strain gages didesain untuk mengkonversi gerak mekanik sinyal elektronik. Strain gages adalah kawat penghantar yang resistansinya berubah apabila terdapat perubahan bentuk pada permukaan pelat.
Strain gages ditempatkan pada suatu struktur sedemikian rupa sehingga perubahan panjang dari strain gages dan struktur itu sama. Strain gages adalah jenis lembaran logam. Panjang aktif dari strain gages tersebut terletak di sepanjang sumbu membujurnya. Strain gages harus dipasang sedemikian rupa sehingga sumbu membujurnya terletak dalam arah yang sama dengan gerakan struktur yang harus diukur.
Gambar 2.40. Strain Gages Tabel 2.8. Dimensions Strain Gages
Gambar 2.41. Two Active Strain Gages (tempat fisik)
Sumber : Jacob, J Michael. Industrial Control Electronic Application and Design, Eaglewood Cliffs, New Jersey: Prentice-Hall,1998, p.119
2.3.3.1 Jenis Strain Gages ( mass sensor) Yang Dipakai
Strain gages yang dipakai adalah strain gages coding sistem dengan jenis:
10 - 120 – C1 – 11 L 1M 2 R Keterangan:
10 : Active gage length (10mm)
5: 5mm 1N: 1mm(*) 3: 3mm 02: 0.2mm 2: 2mm
120 : Resistance in ohms C1 : Gage pattern
Gambar 2.42. Gage Pattern 11 : Self-Temperature-Compentation (S-T-C)
Tabel 2.10. Self-Temperature-Compentation (S-T-C) S-T-C
Code
Thermal expansion Coefficient (PPM/0C
Matix color
Applicable material
11 10.8 Red Iron,Concrete
16 16.2 Orange Stainless steel, Copper
23 23.4 Green Auminum
27 27.0 Yellow Magnesium
L : Extension leadwire (L : Stranded copper wire, flat cable, vinyl insulation)
1M : Leadwire length
2.3.3.2 Bahan Strain Gages
Strain gages dibuat dari panduan logam seperti konstanta, Nichrome V, Dinaloy, Stabiloy atau paduan platina. Untuk pekerjaan suhu tinggi dibuat dari kawat. Untuk suhu menengah, strain gages dibuat dengan membentuk paduan logam menjadi lembaran-lembaran yang sangat tipis dengan proses fotoetsa. Hasil buatan ini disebut strain gages jenis lembaran.
2.3.3.3 Perubahan Resistansi Strain Gages
Perubahan resistansi pada strain gages dinamakan R. Produsennya memperinci resistansi pengukur R. Begitu R selesai diukur, perbandingan R/R dapat dihitung. Produsen juga memberikan faktor pengukur (GF) terperinci untuk setiap pengukur. Faktor pengukur adalah perbandingan dari persen perubahan resistansi sebuah pengukur terhadap persen perubahan panjangnya. Jika perbandingan R/R dibagi dengan faktor pengukur (GF), hasilnya adalah perubahan panjang pengukur ( L) terhadap panjang semulanya (L). Perubahan resistansi strain gages ( R) kecil. R mempunyai harga sebesar beberapa milliohm. Jadi :
ε
=L
∆L
= GF R
∆R /
(2.7) Dimana:
R = Perubahan resistansi R = Resistansi
GF = Gage factor
2.4. Motor DC
Sebuah motor DC terbentuk dari kumparan kawat yang dipancangkan di dalam slot-slot pada sebuah silinder yang terbuat dari bahan ferromagnetic.
Silinder ini diberi nama armature. Armature dipasang pada suatu bentuk dudukan (bearing) dan bebas berputar. Dudukan armature adalah sebuah medan magnet yang dihasilkan oleh magnet-magnet permanen atau arus yang dialirkan melalui kumparan-kumparan kawat yang dinamakan kumparan medan. Kedua bentuk magnet ini, magnet permanent ataupun electromagnet, disebut sebagai stator
mengakibatkan perputaran. Gambar 2.43 memperlihatkan prinsip-prinsip dasar semacam itu pada sebuah motor. Beberapa buah sikat dan sebuah komutator digunakan untuk membalikkan arah aliran arus didalam kumparan pada tiap-tiap setengah putaran, guna mempertahankan putaran kumparan.
Kecepatan putaran dapat diubah dengan cara mengubah besarnya arus di dalam kumparan armature. Akan tetapi, karena sumber tegangan tetap biasanya digunakan sebagai input ke kumparan. Perubahan arus yang diperlukan seringkali diperoleh melalui penggunaan sebuah rangkaian elektronik. Rangkaian ini dapat mengontrol nilai rata-rata tegangan, dan dengan sendirinya arus, dengan cara mengubah-ubah interval waktu. Dalam hal ini motor AC lebih murah, lebih kokoh, dan handal dibandingkan motor-motor DC. Tetapi mengontrol dan mempertahankan kecepatan motor pada umumnya lebih sulit dibandingkan dengan motor DC. Sebagai akibatnya motor DC dengan jenis motor tanpa sikat bermagnet permanen, lebih banyak diaplikasikan untuk tujuan kontrol.
Gambar 2.43. Elemen-elemen Dasar Sebuah Motor DC
6. Kumparan armature di dalam slot 7. Armatur
Berikut ini adalah karakteristik motor DC yang digunakan 1. Frequency : 50 – 60 Hz
2. Rpm : 15 ~ 20 rpm 3. Tegangan : 5 – 24 volt 4. Arus : 0.9 ampere
2.5. Rangkaian R to V
Rangkaian R to V ini menggunakan rangkaian jembatan wheatstone.
Rangkaian ini digunakan untuk mengubah ouput dari strain gages yang berupa resistansi ke dalam bentuk tegangan. Rangkaian jembatan wheatstone adalah sebuah rangkaian pembagi tegangan yang digunakan untuk mengukur resistansi elektrikal yang static atau dinamik. Output tegangan keluaran dari rangkaian jembatan wheatstone dalam milivolt. Prinsip kerja untuk keseimbangan untuk jembatan wheatstone jika
2 1 R
R =
R R
R R
∆
−
∆
+ , maka tegangan keluaran dari jembatan
wheatstone = 0 (tidak ada beda tegangan antara terminal E2 (Vout (+)) dan E1 (Vout (-)). Di bawah ini adalah rangkaian dari jembatan wheatstone:
Gambar 2.44. Bridge Configuration
Sumber : Jacob, J Michael. Industrial Control Electronic Application and Design, Eaglewood Cliffs, New Jersey: Prentice-Hall,1998, page.119
= 2E -
R 2 =
R R R R
4 2 2
2 − + ∆
= R R 2
∆ (2.8)
2.6. Operational Amplifier (Op-Amp)
Op-Amp merupakan rangkaian penguat tegangan dengan elemen tahanan, kapasitor, dan transistor yang dibuat secara integrated circuit (IC). Op amp mempunyai lima terminal dasar: dua terminal untuk mensuplai daya, dua terminal untuk input, dan satu untuk output. Karakteristik-karakteristik yang dimiliki oleh Op-Amp sebagai amplifier ideal, yaitu:
• Impedansi input yang tinggi (Zi)
• Impedansi output yang rendah (Zo)
• Mempunyai penguatan tegangan yang tinggi
Skema rangkaian untuk OP AMP seperti terlihat pada gambar 2.45.
berikut.
2.6.1. Voltage Follower (buffer)
Buffer digunakan untuk menghantarkan tegangan dari satu rangkaian yang memiliki impedansi tinggi ke rangkaian kedua yang memiliki impedansi rendah. Buffer bisa dibuat hanya dengan menghubungkan inverting input op-amp pada output.
Gambar 2.46. Rangkaian Voltage Follower (Buffer)
2.6.2. Differensial Amplifier (Penguat differensial)
Rangkaian penguat differensial ini digunakan untuk memperkuat atau mengurangi perbedaan antara 2 sinyal input yang berbeda. Salah satu karakteristik yang paling penting pada penguat differensial adalah CMRR-nya (common mode rejection ratio) karena biasanya sinyal masukan adalah tegangan (DC) differensial yang kecil (milivolt) dan sinyal masukan common mode berupa tegangan dc yang besar (volt). Tegangan common mode adalah tegangan kedua masukannya bersama-sama dihubungkan ke sumber tegangan (gambar 2.36). Penguat differensial ini banyak digunakan dalam aplikasi DC dan frekuensi rendah.
Rangkaian penguat differensial ini dibentuk dari empat tahanan presisi (1%) dan sebuah penguat operasional seperti ditunjukan pada gambar 2.31. Terminal masukannya ada dua, masukan bertanda (-) yaitu inverting input, dan masukan bertanda (+) yaitu noninverting input, dihubungkan dengan terminal op-amp.
Gambar 2.47. Differential Amplifier
Menurut studi Perencanaan dan pembuatan timbangan digital untuk kantor pos dengan menggunakan MCS-51 (Range 5gr-2kg), Alexandra (1993, p. 10-13):
Tegangan keluaran Vo akibat V1 dan V2 adalah sebagai berikut:
Vo1 = - 1 3 R R V1
Vo2 = (1 + 1 3 R R ) (
4 2
4 R R
R
+ ) V2 Vo = Vo1+Vo2
Vo = (1 + 1 3 R R ) (
4 2
4 R R
R
+ ) V2 - 1 3 R
R V1 (2.9)
Jika R = R1 =R2 = R3 = R4 maka Vo = V2 – V1 Jika rangkaian dalam keadaan balance sempurna (jika
1 3 R R =
2 4 R
R ), maka
Vo = ( 1 + 2 4 R R ) (
4 2
4 R R
R
+ ) V2 - 2 4 R R V1
= 2 4 R
R V2 - 2 4 R R V1
4 R
Sedangkan penguatan common mode didefinisikan:
Ac =
2 1
2 V V
Vo + =
Vic
Vo (2.13)
Jika penguat dalam keadaan balance sempurna dan op-amp tidak mempunyai penguatan common mode, maka rangkaian tidak akan mempunyai penguatan common mode (penguatan common mode ini mendekati nol), tetapi ini sulit diperoleh. Dalam keadaan ideal ini, tegangan keluaran Vo adalah:
Vo = Ad (V2 – V1) (2.14)
Jika rangkaian tidak dalam keadaan balance sempurna dan op-amp mempunyai penguatan common mode tak terhingga, maka tegangan keluarannya -:
Vo = Ad Vd + Ac Vic (2.15)
Dimana:
Vd = V2 – V1 dan Vic = 2
1 (V1+V2) (2.16)
V1 = Vic - 2
1 Vd dan V2 = Vic + 2
1 Vd (2.17)
Gambar 2.48. Differential Amplifier Modification
Agar rangkaian menjadi balance sempurna (penguatan common mode mendekati nol), maka rangkaian penguat differential dimodifikasi seperti gambar 2.46, dimana tahanan R4 diganti dengan sebuah tahanan tetap yang besarnya 0.9 R3 yang diseri dengan sebuah multiturn 0.2 R3 dengan tujuan untuk melakukan pendekatan dari harga R3 yang ditentukan (misalnya harga dari R3=10KÙ maka pendekatannya untuk harga R4 antara range 9K – 11K, yaitu dengan menggunakan tahanan sebesar 9KÙ yang diseri dengan multiturn sebesar 2KÙ).
yang dapat diabaikan. Pada lampiran data op-amp biasanya tidak dicantumkan common mode gain, tetapi common mode rejection ratio (CMRR), dimana:
CMRR = Ac
Ad (2.18)
Dari persamaan di atas diperoleh persamaan untuk keluaran dari penguat differential:
Vo = Ad Vd + Ac Vic (2.19)
CMRR = Ac
Ad Ac =
CMRR
1 Ad (2.20)
Disubsitusikan menjadi:
Vo = Ad Vd +
CMRR
1 Ad Vic
(2.21) Jadi persamaan keluarannya adalah:
Vo = Ad Vd (1+
CMRR 1
Vd
Vic) (2.22)
Dalam hal ini dapat diketahui bahwa penguatan differensial ini harus didesain dengan harga CMRR yang besar (bila dibandingkan dengan perbandingan dari sinyal common mode terhadap sinyal differensial), yaitu dengan menggunakan penguat operasional yang presisi. CMRR dibagi menjadi dua yaitu CMRR dari penguat operasional itu sendiri dan yang kedua adalah CMRR dari resistor eksternal. Jika rangkaian dalam keadaan balance sempurna dan CMRR dari op amp , maka pengutan common mode yang disebabkan oleh op-amp hanya:
Common mode rejection (CMR) sering digunakan dalam lampiran data, yang didefinisikan sebagai berikut:
CMR = 20 log CMRR dB (2.25)
Jika kedua penguatan common mode dipertimbangkan, maka CMRR baik digunakan untuk rangkaian op-amp dikombinasikan menjadi:
CMRRc =
e common pengua
total
al differenti pengua
mod tan
tan
=
Acc Aco
Ad
+ (2.26)
Banyak aplikasi dari rangkaian ini digunakan untuk transducer sinyal level rendah yang membutuhkan penguatan DC yang besar. Kestabilan DC dari tegangan keluaran Vo membutuhkan perhatian penuh dalam perancangan penguat differensial. Tegangan keluaran yang ideal haruslah sama dengan hasil kali dari input masukan DC. Selain CMRR yang merupakan karakteristik penting yang mempengaruhi pada penguat differensial ini. Faktor lainnya yang mempengaruhi tegangan keluaran dari op-amp adalah arus bias masukan (Ib), Arus offset masukan (Ios), tegangan offset masukan (Vos).
2.7. Instrumentation Amplifier (IA)
Rangkaian instrumentation amplifier digunakan untuk memperbesar gain (penguatan) dari input sebelumnya. Instumentation amplifier ini dapat dioptimalkan sebagai rangkaian pengkondisi sinyal untuk sinyal level rendah yang mempunyai banyak noise dan juga karena kinerja DC-nya. Sebuah penguat intrumentasi memiliki perolehan tegangan yang besar, CMRR yang tinggi, offset masukan yang rendah, arus suhu yang rendah, dan impedansi masukan yang tinggi. Untuk dapat memiliki CMRR yang tinggi dan offset yang rendah, harus digunakan penguat operasional yang presisi pada saat membuat rangkaian instrumentation amplifier. Instrumentation amplifier terdiri dari 2 tahap yaitu.
1. Penguat masukan (input amplifier)
Penguat masukan (input amplifier) adalah tahap pertama dari bagian instrumentation amplifier yang mempunyai masukan differensial dan keluaran differential, fungsi penguat masukan (input amplifier) memberikan impedansi
Gambar 2.49. Instrumentation Amplifier
Sumber : Jacob, J Michael. Industrial Control Electronic Application and Design, Eaglewood Cliffs, New Jersey: Prentice-Hall,1998, page.200
Tahap pertama ini terdiri dari dua buah penguat yang bersesuaian.
Masing-masing tegangan input (V1 dan V2) diberikan langsung pada masukan input non inverting (+) dari penguat operasional, sehinggga memberikan impedansi input yang tinggi. Tegangan yang keluar dari penguat operational adalah:
VRg = V1 – V2 (2.27) IRg =
Rg V2 -
V1 (2.28)
Jadi :
Vo = IRg x (2R1+Rg)
hanya mempengaruhi penguat differensial (Ad =
1 2 V V
Vo
− ), tidak mempengaruhi penguatan common mode (Ac =
Vic
Vo ). Penguatan dari seluruh rangkaian pada umumnya dikontrol hanya dengan mengatur Rg.
2. Differential amplifier
Tahap kedua dari instrumentation amplifier adalah differential amplifier seperti yang dibahas sebelumnya.
2.8. Zero and Span Circuit
Rangkaian zero and span menggunakan inverting summer yang berfungsi untuk memperlebar range tegangan keluaran (Vout) dari instrumentation Amplifier yang diinginkan:
Gambar 2.50. Zero and Span Circuit Tegangan keluarannya (Vout) adalah :
ev1 = - Ri
Rf . Vin - Ros
Rf V (2.31)
ev2 = Ri
Rf . Vin + Ros
Rf . V (2.32)
b = Ros
Rf V : Yinterface/offset/zero