TI - 3222: Otomasi Sistem Produksi
Te or i da n D a sa r Sist e m Pe n ge n da li
Labor at or ium
Labor at or ium Sist emSist em Pr oduksiPr oduksi
w w w .lspit b.or g
w w w .lspit b.or g
©
©20042004
TI-3222: Otomasi Sistem Produksi - 5
2
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Hasil Pembelajaran
•
Um um
Mahasiw a m am pu unt uk m elakukan pr oses per ancangan
sist em ot om asi, sist em m esin NC, ser t a m erancang dan
m engim plem ent asikan sist em k ont r ol logika.
•
Khusus
TI-3222: Otomasi Sistem Produksi - 5
3
Teori dan Dasar Sistem Pengendali
•
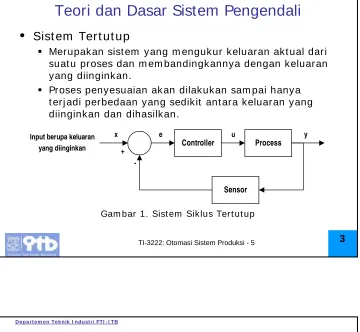
Sist em Ter t ut up
Merupakan sist em y ang m engukur keluar an akt ual dar i
suat u proses dan m em bandingk anny a dengan k eluaran
yang diinginkan.
Pr oses penyesuaian akan dilakukan sam pai hanya
t er j adi per bedaan yang sedikit ant ara k eluaran y ang
diingink an dan dihasilk an.
Gam bar 1. Sist em Siklus Ter t ut up Controller Process
Sensor Input berupa keluaran
yang diinginkan +
-e u y
x
TI-3222: Otomasi Sistem Produksi - 5
4
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Sistem Tertutup
Nilai keluaran
y
akan dibandingkan denganx
.Selisih diantaranya disebut sebagai kesalahan / galat (error),
y
x
e
=
−
.Untuk mengendalikan sistem, perlu dibangkitkan sinyal pengendali
u
yang didasarkan atas nilaie
.Kriteria performansi sistem:
1. Kecepatan respon, perubahan variabel keluaran
y
merespon perubahan nilai acuan x . 2. Error,e
, selisih antara signal masukx
dan variabel proses keluarany
setelah sekianwaktu.
3. Stabilitas sistem setelah bekerja sekian lama. 4. Sensitivitas sistem terhadap gangguan
Controller Process
Sensor Input berupa keluaran
yang diinginkan +
-e u y
TI-3222: Otomasi Sistem Produksi - 5
5
Jenis Pengendali
•
Em pat j e n is pe n ge n da li unt uk pengendali
pr oses sist em bat ch dan k ont iny u:
Pr opor t ional
Pr opor t ional plus int egral
Pr opor t ional plus der ivat ive
Pr opor t ional plus int egral plus der ivat ive
•
Jenis ( 1) m er upak an yang paling seder hana dan
k ur ang ak ur at , dan j enis ( 4) y ang paling
kom pleks dan sangat akur at .
TI-3222: Otomasi Sistem Produksi - 5
6
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
0 1
Time
O
ut
put
Y
Amplitude
Input X
Underdamped Response
Overdamped Response
Critically damped response
Steady-State Error Overshoot
Respons Transien (Peralihan)
•
Respons per alihan: ket ika input pada sist em pengendali ber ubah secar a m endadak, keluaran m em er lukan w akt u unt uk m er espon per ubahan t er sebut .•
Bent uk r espons ini seper t i pada gam barTI-3222: Otomasi Sistem Produksi - 5
7
Respons Transien (Peralihan)
•
Respons Tipe 2 : Respons Ov er dam ped. Out put t idak per nah m eleset ke at as nilai dar i input , nam un but uh w akt u y ang lam a unt uk m encapai nilai final.
•
Respons Tipe 3 : Cr it ically - dam ped. Respons y ang sanggup m encapai nilai final dalam w ak t u singk at t anpa m eleset . m encapai input , k em udian m eleset t ur un dar i nilai, dan ak hir nya t inggal pada daer ah dekat dengan nilai input . Respons ini dik at ak an m em ilik i efek osilasi
TI-3222: Otomasi Sistem Produksi - 5
8
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Respons Transien (Peralihan)
•
St abilit as
Jika dengan input at au gangguan yang diber ikan pada
fasa t r ansien, kem udian t ercapai out put st eady- st at e,
Kesalahan Kondisi St abil
( St eady- St at e Er r or )
TI-3222: Otomasi Sistem Produksi - 5
9
Respons Transien (Peralihan)
•
Sensit ivit as
Sensit ivit as sist em adalah per bandingan ant ar a
per sent ase per ubahan out put dengan persent ase
per ubahan input .
Perubahan pada input bisa norm al at aupun gangguan.
Par am et er pr oses akan berubah seir ing dengan usia,
lingkungan, kalibr asi salah, dsb.
Sist em sik lus t ert ut up t idak t erlalu sensit iv t erhadap hal
ini k arena adany a proses m onit oring balik . Kondisi
sebaliknya t er j adi pada sist em siklus t er buka.
Jika ingin dihasilkan sist em siklus t er buka pr esisi, m aka
harus sangat berhat i- hat i dalam pem ilihan perangkat .
TI-3222: Otomasi Sistem Produksi - 5
1 0
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Tipe Sistem
•
Ter dapat t iga t ipe sist em :
Tipe 0
: Sinyal input k onst an m enghasilk an nilai out put
k onst an
Tipe 1
: Sinyal input k onst an m enghasilk an nilai out put
yang berubah secar a
k onst an
TI-3222: Otomasi Sistem Produksi - 5
1 1
Tipe 0
Jika sistem memiliki penguatan K , maka kesalahan steady-state, ess, untuk nilai
input A adalah :
K A ess
+ =
1
Semakin besar nilai K, semakin kecil kesalahan, semakin besar nilai K, sistem
akan semakin tidak stabil.
Jika input ke sistem tipe 0 ini adalah kecepatan atau akselerasi, maka output tidak akan bisa mengikuti dan kesalahan steady-state akan naik seiring waktu dan mendekati nilai tak hingga
0 A
Time Amplitude
Input
Steady State period Transient Period
Output ess
x = constant
TI-3222: Otomasi Sistem Produksi - 5
1 2
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Tipe 0
•
Jika sist em m em iliki penguat an K, m ak a k esalahan st eady - st at e, ess, unt uk nilai input A adalah:•
Sem akin besar nilai K sem ak in k ecil kesalahan, sem ak in besar nilai K sist em akan sem akin t idak st abil.•
Jika input ke sist em t ipe 0 ini adalah k ecepat an at au akseler asi, m aka out put t idak akan bisa m engikut i dan k esalahan st eady-st at e akan naik seiring w akt u dan m endekat i nilai t ak hinggaK
A
e
ss+
=
1
0 A
Time Amplitude
Input
Steady State period Transient Period
TI-3222: Otomasi Sistem Produksi - 5
1 3
Tipe 1
•
Kesalahan st eady - st at e unt uk sist em ini t er hadap
nilai input dihar apk an adalah nol.
•
Kesalahan st eady- st at e dar i sist em ini
sehubungan dengan naik ny a input dar i nilai
ukur an B
•
Nilai er r or :
•
Kenaikan nilai akan m enur unkan kesalahan
st eady- st at e.
K
B
e
ss=
0 A
Time Amplitude Input
Steady State period Transient Period
Output
ess B
TI-3222: Otomasi Sistem Produksi - 5
1 4
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Tipe 2
•
Sist em ini m em iliki kesalahan st eady- st at e nol
unt uk sem ua input posisi at aupun kecepat an.
Jika input adalah akseler asi dar i nilai C, m aka
nilai er r or dapat dihit ung:
•
Kenaikan nilai akan m enur unkan kesalahan
st eady- st at e
K C ess =
0 A
Time
Input
Steady State period Transient Period
Output
TI-3222: Otomasi Sistem Produksi - 5
1 5
Tipe Pengendali
•
Pengendali Pr opor t ional
Pengendali pr opor sional secar a seder hana m enyesuaikan penguat an dar i sist em .
Jika pr oses m em iliki penguat an dan pengendali m em ilik i penguat an , m aka penguat an sist em keselur uhan adalah .
Jika sist em t idak st abil unt uk penguat an dar i , m aka dapat dipilih nilai yang lebih k ecil dar i nilai yang dihasilk an dar i sist em st abil.
Jika t idak t er dapat m asalah st abilit as, dapat dipak ai
pengendali pr opor sional dan m eningkat kan penguat an sam pai kesalahan st eady- st at e m enur un pada nilai yang diinginkan.
•
Pengendali Pr opor t ional Plus I nt egral
Pengendali Pr opor t ional plus I nt egr al ( disebut lag
com pensat or ) m enyesuaikan penguat an sist em seper t i pada pengendali pr opor sional, nam un j uga m eningkat kan t ipe sist em sat u t ingkat ke at as ( per hat ikan Tabel 1) .
Meningkat kan t ipe sist em akan m eningkat kan j enis input yang bisa dit er im a sist em t anpa m enghasilkan kesalahan yang t idak bisa dit erim a.
TI-3222: Otomasi Sistem Produksi - 5
1 6
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Tipe Pengendali
•
Pengendali Pr opor t ional Plus Der ivat ive
Pengendali Pr opor t ional Plus Der ivat ive ( PD) ( disebut j uga lead com pensat or ) m engij inkan adanya per ubahan pada r espons t r ansien t er hadap sist em .
Penggunaan pengendali PD dapat m engubah sist em t ipe 0 m enj adi t ipe 1 at aupun 2 dan j uga sebaliknya dengan k endala yang dim unculkan dar i sist em sendir i.
Jika digabungkan dengan pengendali lainnya, penguat an dapat diubah unt uk m engubah st abilit as dan k esalahan st eady - st at e
•
Pengendali Pr opor t ional Plus I nt egral Plus Der ivat ive
Pengendali Pr opor t ional Plus I nt egr al Plus Der ivat ive at au pengendali t iga m ode m em ungkinkan per ubahan pada penguat an, t ipe sist em , dan r espons t r ansien unt uk m eningkat kan oper asi pr oses.
TI-3222: Otomasi Sistem Produksi - 5
1 7
Tipe Pengendali
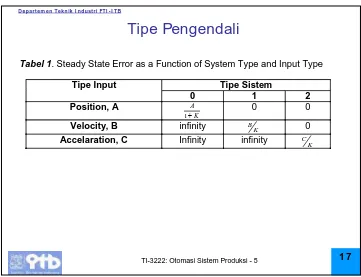
Tabel 1. Steady State Error as a Function of System Type and Input Type
Tipe Sistem Tipe Input
0 1 2
Position, A
K A
+
1
0 0
Velocity, B infinity BK 0
Accelaration, C Infinity infinity CK
TI-3222: Otomasi Sistem Produksi - 5
1 8
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Proses Kontinyu
•
Beber apa t er m inologi y ang dipakai dalam aplikasi pr oses
k ont rol k ont iny u ( unt uk ilust rasi v isual, lihat gam bar 6) :
1. Pr ocess Var iable2. Cont r olled Var iable, m isalny a suhu air .
3. Manipulat ed Var iable, m isalnya j um lah uap y ang disuplai k e dalam t angk i
4. Dist ur bance, m isalny a t am bahan j um lah air dingin y ang t idak t er kendali yang m asuk sebagai r espons dar i k ebut uhan beban 5. Load Var iable, m isalny a k ebut uhan air panas
6. Cont inuous Cont r ol, m isalnya j alan m asuk pada pengendali k at up uap 7. Set point , suhu air yang diinginkan oleh oper at or
8. Sy st em Lag, w akt u y ang dibut uhkan m ulai dar i saat kalor m ulai dialir k an k e t angk i sam pai sensor suhu air m endet ek si per ubahan. 9. Tr ansfer Lag,
TI-3222: Otomasi Sistem Produksi - 5
1 9
Proses Kontinyu
•
Dalam pengendali pr oses k ont iny u, t it ik aw al y ang dim asukkan oleh operat or , secar a kont inyu dibant ingkan dengan variabel keluaran.•
Siny al er r or akan diper gunakan oleh pengendali unt uk m em odifikasi sinyal m odul pengendali out put dengan desain am plit udo dan polar it as unt uk m er eduk si nilai er ror.TI-3222: Otomasi Sistem Produksi - 5
2 0
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Proportional Control
•
Jika out put lebih besar dar i nilai input , m aka nilai err or negat ive akan m enj adi input buat pengendali sehingga out put nant inya ak an m enur un dan nilai err or ak an m engecil, dem ik ian j uga sebalik ny a.•
Per m asalahan yang dihadapi oleh pengendali proport ional bahw a j ika t er j adi gangguan per m anen, t ipe pengendali ini t idak m ungkin dapat m engem balik an nilai v ariabel pengendali m enj adi nilai input aw al. Hal ini kar ena pengendali ber basis pada sinyal er r or unt uk m engubah v ar iabel m anipulasinya.•
Salah sat u car a unt uk m engelim inasi er r or ini adalah denganH
: output to manipulated variable
) (O
H
: initial output setpoint
p
K
: gain factor
TI-3222: Otomasi Sistem Produksi - 5
2 1
Analog Proportional Control
•
Sit uasi y ang dit unj ukkan pada gam bar 7 di baw ah dapat
dibent uk dar i r angkaian oper at ional am plifier sepert i pada
gam bar 8.
Gam bar 7. Gr afik Respons Out put Gam bar 8. Pr opor t ional Analog Pengendali Pr opor t ional VS Er r or Cont r ol I m plem ent at ion
0% G1
G2
e +
-100%
H(C)
Error
Kp(G2)>Kp(G1) R3
R1
R2
-+ VH(0)
Ve(t)
R2=R3
Vout Vout=VH(0)+Kp.Ve(t)
dimana Kp=R2/R1
TI-3222: Otomasi Sistem Produksi - 5
2 2
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Analog Proportional Control
•
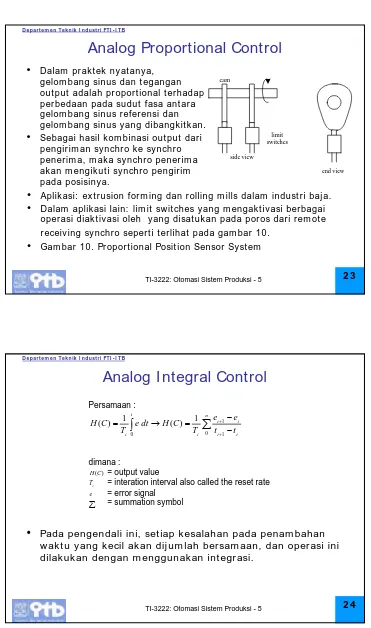
Salah sat u cont oh aplikasi dar i pengendali pr opor t ional ini adalah sist em posit ioning synchro seper t i pada Gam bar 9.Gam bar 9. Pr opor t ional Posit ion Sensor Sy st em
•
Synchro t r ansm it t er adalah per alat an yang m engubah posisi poros m enj adi siny al elek t r ik.•
Synchro r eceiver akan m em balik kan proses.•
Synchro t r ansm it t er yang dit em pelkan pada por os out put dar i sist em dan m engir im kan sinyal fasa AC unt uk m engat ur indikat or yang ada di st asiun pengendali unt uk m engindikasi posisi por os.•
Out put dar i pengir im an synchr o dapat diar t ikan sebagai volt ase yang secar a kont inyu ber beda t er gant ung dar i sudut por os.Position Sensor
Remote Setpoint and display
Electrical Signal Sending Synchro
Mechanical couple to the shaft Rotating Shaft
wires
TI-3222: Otomasi Sistem Produksi - 5
2 3
Analog Proportional Control
•
Dalam pr ak t ek ny at anya, gelom bang sinus dan t egangan out put adalah pr opor t ional t er hadap per bedaan pada sudut fasa ant ara gelom bang sinus r efer ensi dan gelom bang sinus yang dibangkit kan.•
Sebagai hasil kom binasi out put dar i pengir im an sy nchro k e synchr o pener im a, m aka sy nchro pener im a akan m engik ut i synchro pengir im pada posisinya.TI-3222: Otomasi Sistem Produksi - 5
2 4
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Analog I ntegral Control
•
Pada pengendali ini, set iap k esalahan pada penam bahan
w akt u y ang kecil akan dij um lah bersam aan, dan oper asi ini
dilakukan dengan m enggunakan int egr asi.
Persamaan :
T = interation interval also called the reset rate
TI-3222: Otomasi Sistem Produksi - 5
2 5
Analog I ntegral Control
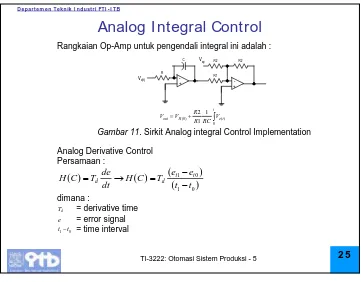
Rangkaian Op-Amp untuk pengendali integral ini adalah :
Gambar 11. Sirkit Analog integral Control Implementation
Analog Derivative Control
T = derivative time
e = error signal
0
TI-3222: Otomasi Sistem Produksi - 5
2 6
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Analog Derivative Control
•
Sist em pengendali der ivat if ini dapat m engant isipasi
kesalahan sist em dengan bereaksi lebih cepat unt uk
m engubah rat a- r at a perubahan dar i v ar iabel. I ni akan
ber efek unt uk m em buat pengendali m er espons lebih cepat
dan m em per t ahankan t it ik aw al lebih baik. Secar a fisik,
dengan r angkaian op- am p dapat dilihat pada gam bar 12.
TI-3222: Otomasi Sistem Produksi - 5
2 7
Composite Modes
•
Jika ket iga pengendali diper gunakan secar a t er pisah, m aka
m asing- m asing m em iliki kekur angan dan k et erbat asan
dalam efek t ifit asny a. Sehingga bisa dilakukan penggunaan
beber apa j enis pengendali secar a ber sam aan.
•
PI Mode
Pengendali Pr opor t ional I nt egr al dipakai dalam sit usi dim ana t er j adi per ubahan load yang besar y ang m em er lukan
per ubahan signifik an pada t it ik aw al.
Pengendali PI akan efekt if dalam sist em dim ana per ubahan beban m uncul secar a per lahan kar ena per ubahan beban yang cepat dapat m enim bulk an inst abilit as sist em j ik a w ak t u int egr asi t idak dit ent ukan dengan baik .
Keunt ungan lainny a, bagian int egr al bisa m engelim inasi kesalahan yang m uncul j ika m ener apkan pengendali pr opor sional saj a.
Unt uk it u r ent ang pr opor t ional dapat dit ent uk an lebih lebar unt uk m enurunkan r espon kem eleset an naik dar i sist em .
TI-3222: Otomasi Sistem Produksi - 5
2 8
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Composite Modes
Persamaan untuk pengendali PI adalah :∫
Penguatan total integral dipengaruhi dari faktor penguatan proporsional, Kp, namun
faktor penguatan integral, Ti, bisa secara bebas dikendalikan untuk menghasilkan
TI-3222: Otomasi Sistem Produksi - 5
2 9
Composite Modes
•
PD M ode
Pengendali Pr opor t ional Der ivat ive ini t idak dapat
m engelim inasi k esalahan yang m uncul dar i pengendali
pr opor sional.
Pengendali PD dapat berguna bagi sist em yang m em ilik i
per ubahan y ang cepat pada beban kar ena pengendali
PD cenderung m engant isipasi k esalahan t ot al dengan
m erespons pada seberapa cepat perubahan it u t erj adi.
Sem akin cepat r at a- r at a perubahan k esalahan, m aka
kesalahan t ot al akan sem akin besar. Pengendali PD
dipakai dalam sist em m ot or servo dan dalam sist em
yang m em ilik i per ubahan par am et er pr oses yang kecil,
dan cepat .
TI-3222: Otomasi Sistem Produksi - 5
3 0
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Composite Modes
Rumusnya adalah sebagai berikut :
dt de T K e K H C
H( )= (0)+ p. + p. d
dimana :
e = error signal
p
K = proportional gain
d
T = derivative time
) 0 (
H = setpoint
Interaksi antara respons proporsional dan respons derivatif diindikasi dengan perkalian faktor Kp(faktor penguatan proporsional) dan Td(faktor derivatif).
TI-3222: Otomasi Sistem Produksi - 5
3 1
K = proportional gain
i
T = integral time interval
d
T = derivative time interval
e = error
cv = control variable
) 0 (
H = setpoint
TI-3222: Otomasi Sistem Produksi - 5
3 2
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB
Digital Methods
•
Selain m enggunakan sir kit analog unt uk m enyelesaikanperm asalahan persam aan proses pengendali linear, bisa dipakai kom put er digit al secar a alj abar .
•
Siny al analog dikonver si m enj adi dat a biner , dan oper asi seper t i penam bahan, pengur angan, per kalian dan pem bagian bisa diiper gunakan unt uk m enyelesaikan per sam aan yang t elah disebut kan.•
Cont oh gr afis unt uk m enghit ung r at a- rat a per ubahan dar i v ar iabel pengendali yang diper gunakan dalam pengendali der ivat if dapat dilihat pada Gam bar 13.•
Met oda yang diper gunakan sebenar nya m em bagi w akt u m enj adi sekian bagian t er t ent u, dan m elihat kesalahan y ang t im bul pada t iap segm en.TI-3222: Otomasi Sistem Produksi - 5
3 3
Digital Methods
Gam bar 13. Gr aphical Solut ion of Der ivat ive
Erroren-1 en
Td is derivative sample time
n-1 n
1 2 Time
The rate of change remains constant in each sampling time
d n n n
T
e
e
M
=
(
−
−1)
where
M
nis called the slope of the error signal at sample NTI-3222: Otomasi Sistem Produksi - 5
3 4
D e pa r t e m e n Te k n ik I n du st r i FTI - I TB