J U R N A L
T E K N O – I N S E N T I F
Volume 5 Nomor 2, Oktober 2011
Jurnal Tekno-Insentif adalah wadah informasi bidang ilmu Teknik berupa hasil penelitian, studi kepustakaan maupun tulisan ilmiah yang terkait. Terbit pertama kali tahun 2006 dengan frekuensi terbit dua kali setahun.
Penanggung Jawab Koordinator Kopertis Wilayah IV
Ketua
Sekretaris Pelaksana Kopertis Wilayah IV Dewan Redaksi
Ir. Robertus Wahyudi Triweko, M.Eng., Ph.D. Redaksi Pelaksana:
Drs. Tia Sugiri, ST, M.Pd. Heni Hermina, S.H., M.Si. Ir. Nefli Yusuf, M.Eng.
Dra. Maimunah Entin Hartini, S. Sos., M.Si.
Aminatun, S. Sos. Penyunting Ahli:
Prof. Dr. Ir. Eddy Yusuf Sapardi, M.Sc. . Prof. Dr. Ir. Rochim Suratman
Prof. Dr. Ir. Wimpy Santosa Alamat Redaksi Kopertis Wilayah IV Jl. Penghulu Hasan Mustafa No. 38
Telepon: (022) 7275630
TEKNO-INSENTIF
Volume 5 Nomor 2, Oktober 2011
DAFTAR ISI
1
DESIGN OF TYPE-2 FUZZY CONTROLLER FOR TRUCK BACKER-UPPER
PROBLEM ...
Oleh:
Muhammad Aria,
Electrical Engineering, Indonesian Computer University
1
2
PENGARUH BENTUK PENGUAT (
WIND BRACE
) PADA MENARA
Studi Kasus Menara Segi Tiga Berpenumpu-Sendiri (
Self-Support
) ...
Oleh: Nefli Yusuf, Teknik Mesin, STT Mandala Bandung9
3 ALGORITMA
SEQUENTIAL INSERTION
UNTUK MENGATASI MASALAH
RUTE KENDARAAN
DENGAN
BACKHAUL
, RUTE MAJEMUK DAN
TIME
WINDOW ...
Oleh: Johan Oscar Ong, Teknik Industri, Institut Teknologi Harapan Bangsa16
4 PENGARUH
PENGGUNAAN
CANGKANG KELAPA SAWIT TERHADAP
MUTU BETON RINGAN ……….
Oleh: Ike Pontiawaty, Teknik Sipil, Universitas Pakuan – Bogor28
5
PENDEKATAN HOLISTIK PADA ARSITEKTUR VERNAKULAR,
Studi kasus: Kampung Adat Sunda, Jawa barat ...
Oleh: Marcus Gartiwa, Universitas Langlangbuana Bandung37
6
TATANAN MASSA DAN BENTUK BANGUNAN YANG KONTEKSTUAL
DAN KONTRAS TAPAK PADA KORIDOR JALAN SOEKARNO HATTA ...
Oleh: Dewi Parliana, Teknik Arsitektur, Institut Teknologi Nasional, BandungJurnal Tekno Insentif Kopwil4, Volume 5 No.2, Oktober 2011
ISSN: 1907-4964, halaman 1 s.d. 8
PERANCANGAN PENGENDALI
FUZZY
BERTIPE-2
UNTUK MASALAH
BACKER-UPPER
TRUK
Oleh:
Muhammad Aria
Teknik Eletro, Universitas Komputer Indonesia
Abstraksi –
Pengendalian backer-upper truk merupakan permasalahan kendali non-linear. Tujuannya adalah untuk memasukkan sebuah truk ke dalam suatu terminal pengangkut secepat dan seakurat mungkin. Selama ini, permasalahan backer-upper truk telah menjadi standar permasalahan dalam bidang kendali. Makalah ini menyajikan desain dan hasil simulasi dari implementasi pengontrol Fuzzy bertipe 2 (T2FC) untuk kasus backer-upper truk. Pengontrol yang dirancang terdiri dari modul fuzzy backward truck dan modul fuzzy forward truck. Kumpulan aturan fuzzy untuk masing-masing modul dibangun berdasarkan pengalaman pakar dan data-data numeric. Perangkat lunak berbasis LabVIEW dibuat untuk melakukan simulasi kasus ini. Perangkat lunak ini digunakan sebagai sarana evaluasi dari T2FC yang dirancang. Performansi dari T2FC kemudian dibandingkan dengan performansi Fuzzy bertipe 1 (T1FC). Hasil simulasi menunjukkan bahwa T2FC memiliki performansi yang lebih baik daripada T1FC. Waktu parking yang dibutuhkan oleh T2FC 16% lebih cepat daripada T1FC. Tetapi waktu komputasi Logika Fuzzy bertipe 2 lebih kompleks daripada Logika Fuzzy bertipe 1, T2FC lebih lambat 1,8 kali dari pada T1FC. Pada aplikasinya T2FC membutuhkan 1788 unit memori, sedangkan T1FC hanya membutuhkan 1303 unit memori.Kata Kunci:
Pengendali Fuzzy Bertipe 2, Algoritma Karnik-Mendel, Permasalahan backer-upper Truk, Modul Fuzzy Backward Truck, Modul Fuzzy Forward Truck.Abstract –
The truck backer-upper control is a typical nonlinear control problem. The goal is to back up a truck to a loading dock from any initial position as quickly and precisely as possible. For a number of years, truck backer-upper problem has served as a benchmark for control among the practitioners of computational intelligence. This paper presets the design and simulation of Type 2 Fuzzy Controller (T2FC) for truck backer-upper problem. The controller contains fuzzy backward truck module and fuzzy forward truck module. The rules of each module have been obtained from heuristic knowledge and numerical data. A simulator software based LabVIEW has been developed to simulate this problem. The simulation software was used to facilitate the evaluation of the proposed T2FC. Performance of T2FC is compared with Type 1 Fuzzy Controller (T1FC). The simulation result show that the T2FC has better performance than T1FC. Parking duration of T2FC 16% better than T1FC. But Type 2 Fuzzy computation time is more complex than Type 1 Fuzzy algorithm, so T2FC takes 1.8 times slower than T1FC. In application, T2FC needs 1788 units of memory, while T1FC just need 1303 unit memory.Keywords:
Type 2 Fuzzy Controller, Karnik-Mendel algorithm, Truck Backer-Upper Problem, Fuzzy Backward Truck Module, Fuzzy Forward Truck Module.1.
Pendahuluan
Masalah backer-upper truk, yang
diperkenalkan pertama kali oleh Nguyen dan Widrow [1], telah banyak dijadikan kasus penelitian oleh banyak peneliti. Tujuannya adalah untuk merancang pengendali yang dapat memasukkan sebuah truk dari sembarang posisi awal ke dalam suatu terminal pengangkut secepat dan seakurat mungkin.
Studi perancagan pengendalian kasus
backer-upper truk telah dilakukan oleh banyak peneliti. Pada [1], Nguyen dan Widrow mengembangkan suatu pengendali yang terdiri dari dua Jaringan Saraf Tiruan (JST) untuk masalah ini
dimana gerakan truk hanya pada arah maju saja. Keuntungan dari pendekatan Nguyen-Widrow ini, adalah pengendali mampu perbaikan parameter-parameternya secara otomatis. Di dalam [2], solusi pengendali oleh Plumer terdiri dari sebuah JST arah maju. Di dalam [3], Kinjo menggunakan Algoritma Genetik untuk menentukan parameter-parameter dari JST.
seperti struktur yang sederhana, ketelitian yang baik, dapat diterapkan pada sistem yang tidak
linear serta tidak terikat pada suatu model matematik. Selain itu kaidah-kaidah pada sistem
fuzzy juga dapat mudah dimodifikasi karena kaidah disajikan dalam bahasa yang mudah dipahami.
Pada [4], Riid mempresetasikan implementasi sistem fuzzy sebagai sistem supervisi pada pengendali PID untuk mengurangi kompleksitas dari sistem. Pada [5], Kong dan Kosko menggunakan JST dan sistem fuzzy untuk menyelesaikan masalah backing-upper truk ini. Mereka menunjukkan bahwa penggunaan fuzzy ini menghasilkan trajektori truk yang lebih halus dibandingkan dengan menggunakan dua buah JST. Dan pada [6], Pourya menyajikan sistem fuzzy
tunggal yang dapat mengendalikan truk ditambah dua gandengannya.
Kaidah-kaidah pada pengendali fuzzy dapat diperoleh berdasarkan pengalaman dari seorang pakar [7], ataupun dapat dibangun berdasarkan kumpulan pasangan data numerik [8]. Pada penelitian ini, kami membangun kaidah sistem logika fuzzy berdasarkan survei dari beberapa pakar. Dari kasus ini akan mengakibatkan beberapa masalah ketidakpastian.
1) Kata-kata yang digunakan pada antecedent
untuk setiap kaidah fuzzy dapat memiliki arti yang berbeda untuk setiap pakar.
2) Consequent diambil berdasarkan pendapat para pakar, yang memungkinkan munculnya perbedaan, karena para pakar belum tentu memiliki pendapat yang sama untuk setiap kaidah fuzzy.
Sistem logika fuzzy bertipe 1 (T1FC) yang memiliki fungsi keanggotaan bertipe 1, tidak mampu untuk mengatasi masalah ketidakpastian ini. Sedangkan sistem logika fuzzy bertipe 2 (T2FC) yang memiliki fugsi keanggotaan antecedent dan atau consequence-nya bertipe 2, mampu untuk mengatasi ketidakpastian ini. Kemampuan T2FC dalam menangani ketidakpastian ini menyebabkan kinerja T2FC cenderung lebih baik dari kinerja sistem T1FC.
Unsur utama T2FC hampir sama dengan T1FC. Tetapi ada dua unsur yang membedakannya. Pertama yaitu adanya pengolahan keluaran terdiri atas type-reducer (proses pengubahan himpunan
fuzzy bertipe 2 menjadi beberapa himpuan fuzzy bertipe 1) dan defuzzifier). Yang kedua adalah himpunan keanggotaan antecedent dan atau
consequent-nya adalah bertipe-2. Dikarenakan adanya proses type-reduction ini, maka proses komputasi sistem logika fuzzy bertipe-2 lebih berat daripada komputasi sistem logika fuzzy bertipe-1. Tetapi jika fungsi keanggotaan sekundernya adalah himpunan interval, maka komputasi akan menjadi lebih sederhana.
Makalah ini menyajikan studi simulasi implementasi sistem pengendali fuzzy bertipe-2 interval untuk masalah backer-upper truk, dimana
fuzzy bertipe 2 diketahui memiliki kemampuan yang baik dalam mengatasi ketidakpastian [9]. Telah banyak penelitian yang dilakukan berkaitan dengan implementasi fuzzy bertipe-2 ini.
Implementasi pada pembuatan keputusan telah dilakukan oleh Chaneau pada [11]. Implementasi pada robot telah dilakuan oleh Wu pada [13]. Dan implementasi pada pemrosesan data dilakukan oleh John pada [14]. Tetapi sepanjang yang penulis ketahui, belum ada yang mengimplementasikan fuzzy bertipe 2 ini pada masalah backer-upper truk. Kontribusi dari penelitian ini adalah menyajikan model pengedali berbasis logika fuzzy bertipe 2 yang dapat diterapkan pada masalah backer-upper truk. Selain itu perbandingan performansi fuzzy bertipe 2 juga dilakukan terhadap fuzzy bertipe 1.
Makalah ini diorganisasikan sebagai berikut. Pada bagian 2 dijelaskan mengenai Sistem Fuzzy
Bertipe 2. Pada bagian 3 dijelasan mengenai permasalahn pengontrolan backer-upper truk. Desain pengendali Fuzzy bertipe-2 yang dapat diimplementasikan pada kasus backer-upper truk dijelaskan pada bagian 4. Pada bagian 5 disajikan hasil simulasi. Bagian 5 menyimpulkan makalah ini.
2.
Sistem
Fuzzy
Bertipe 2
Konsep Sistem logika fuzzy bertipe-2 telah diperkenalkan oleh Zadeh pada 1975. Tetapi teori lengkap mengenai logika fuzzy bertipe 2 agar dapat menangani ketidakpastian barulah diperkenalkan oleh Mendel dan Liang pada tahun 1999.
Dua sistem logika fuzzy yang sering digunakan saat ini adalah sistem Mamdani dan sistemm Takagi-Sugeno-Kang (TSK). Keduanya memiliki kesamaan pada struktur antecedent dan kaidah JIKA-MAKA yang digunakan. Perbedaannya dalah pada bagian konsekuen. Dimana bagian konsekuen pada sistem Mamdani berupa set fuzzy, adapun bagian konsekuen pada sistem TSK berupa fungsi [15].
Untuk model fuzzy TSK bertipe 2, terdapat tiga kemungkinan struktur [16] :
1. Bagian antecedents berupa set fuzzy bertipe 2 dan bagian consequent adalah set fuzzy bertipe 1. Struktur ini disebut Model I.
2. Bagian antecedents berupa set fuzzy bertipe 2 dan bagian consequent adalah nilai crisp. Struktur ini disebut Model II.
3. Bagian antecedents berupa set fuzzy bertipe 1 dan bagian consequent adalah set fuzzy bertipe 1. Struktur ini disebut Model III.
disajikan pada Gambar 1., yang terdiri dari i variabel masukan dan m kaidah.
Gambar 1. Struktur sistem dari Fuzzy TSK bertipe 2 Model I
A. Kumpulan Kaidah
Pada sistem fuzzy TSK bertipe 2 Model I, maka kumpulan kaidah dari m kaidah dan n variabel masukan, dituliskan sebagai berikut.
IF is AND
K
AND isTHEN is
(1)
dimana dan . Parameter
bagian consequent ,
adalah set fuzzy bertipe-1 dan dituliskan sebagai berikut.
(2)
Fungsi keanggotaan , , ...,
juga adalah interval dimana dituliskan sebagai berikut.
(3)
Dimana adalah fungsi keanggotaan batas
bawah dan adalah fungsi keanggotaan batas atas.
B. Fuzzifikasi
Proses ini mentransformasikan masukan crisp menjadi variabel dalam bentuk fuzzy bertipe 2. Fungsi keanggotaan untuk setiap bagian antecedent
adalah sistem fuzzy bertipe-2 interval menggunakan fungsi keanggotaan Gaussian yang dituliskan sebagai berikut.
(4)
dimana adalah rata-rata nilai
ketidakpastian, dengan a = (1,…,n) adalah jumlah dari bagian antecedent, b = (1,…,m) adalah jumlah dari kaidah yang digunakan dan adalah standar deviasi.
yang berinterval antara 0 dan 1. Kedua adalah fungsi keanggotaan dengan derajat keanggotaan bernilai crisp yang disebut juga fuzzy bertipe 2 interval. Gambar 2. menunjukkan contoh fungsi keanggotaan fuzzy tipe-2 interval gaussian dengan ketidakpastian nilai tengah.
Gambar 2. Fungsi keanggotaan Gaussian untuk fuzzy bertipe 2 interval dengan ketidakpastian nilai tengah
Fungsi keanggotaan batas atas didefinisikan sebagai
(5 )
dengan
(6)
Dan fungsi kenggotaan batas bawah didefinisikan sebagai
(7)
C. Sistem Inferensi Fuzzy
Mekanisme inferensi fuzzy pada bagian antecedent
menggunakan operasi algebraic product, sehingga suatu kaidah dapat dituliskan sebagai berikut.
(8) dan
(9)
Gambar 3. Menunjukkan ilutrasi dari inferensi fuzzy yang terdiri dari dua variabel masukan. Nilai interval pada bagian consequent adalah:
, dimana
(10 )
dengan dan menunjukkan batas bawah dan atas dari nilai keluaran bagian consequent dari kaidah ke b.
D. Type Reduction
Algoritma Karnik-Mendel digunakan untuk menentukan nilai dan . Langkah-langkah yang digunakan untuk menentukan adalah sebagai berikut [17] :
[1] Inisialiasi berdasarkan persamaan:
(11)
(12)
[2] Menentukan agar
(13)
[3] Set:
(14)
Dan menghitung:
(15)
[4] Jika maka berhenti dan .
Jika tidak, maka lanjut ke [5]
Gambar 3. Ilustrasi dari mekanisme inferensi fuzzy bertipe 2 dengan operator algebraic product
Untuk menentukan , sama dengan
prosedur sebelumnya, kecuali pada langkah 3, diset
(16)
sehingga:
(17)
E. Keluaran fuzzy
Karena keluaran dari type-reduction berupa set fuzzy interval bertipe 1, maka nilai keluaran fuzzy dapat dicari berdasarkan persamaan.
(18)
3.
Masalah
Backer-Upper
Truk
Gambar 4 menunjukkan ilustrasi dari truk dan terminal pengangkut. Posisi truk ditentukan berdasarkan tiga variabel yaitu , and , dimana adalah derajat arah truk terhadap
horizontal. Koordinat ( , ) menunjukkan posisi tengah truk. Tartget dari permasalahan backer-upper truk adalah untuk memasukkan truk dari posisi awal ke dalam suatu terminal
pengangkut pada arah ( ).
Gerakan truk kedepan maupun kebelakang diatur pada kecepatan yang konstan. Area yang digunakan berukuran 10 10. Maka pengontrol harus bisa
menentukan arah truk untuk setiap posisinya agar truk dapat masuk ke terminal pengangkut dari sembarang posisi awal dengan secepat dan seakurat mungkin.
Gambar 4. Diagram dari truk dan terminal pengangkut
Untuk mensederhanakan, kami mengasumsikan bahwa jarak vertikal antara truk
dengan terminal pengangkut ( ) tidak digunakan sebagai masukan pengontrol. Sistem kontrol akan terdiri dari dua sistem fuzzy, yaitu sistem fuzzy untuk arah maju dan sistem fuzzy untuk arah mundur. Arah maju dan mundur truk akan
ditentukan berdasarkan nilai .
Maka variabel masukan memiliki rentang
dan dan
variabel keluaran memiliki rentang
, sehingga keadaan akhir truk
adalah .
Untuk simulasi gerakan truk, maka kami menggunakan persamaan-persamaan berikut [18]:
(19)
(2 0)
(21)
4.
Perancangan Sistem Fuzzy Bertipe-2
Terdapat dua sistem fuzzy yang digunakan yaitu sistem fuzzy untuk truk maju (Forward Truck Module) dan sistem fuzzy untuk truk mundur
(Backward Truck Module) seperti ditunjukkan pada Gambar 5.
Gambar 5. Struktur pengendali Fuzzy untuk kasus backer upper truk
Parameter masukan fuzzy yang digunakan adalah arah sudut truk terhadap horizontal yaitu dan posisi horizontal truk yaitu . Sedangkan parameter keluaran fuzzy yang digunakan adalah
arah setir pada truk yaitu . Nilai positif pada menunjukkan arah putaran kekanan. Sedangkan nilai negatif menunjukkan arah putaran kekiri. Untuk meringankan beban komputasi, maka resolusi dari dan masing-masing adalah satu
derajat. Dan resolusi dari adalah
Himpunan fuzzy posisi truk terbagi menjadi 5 variabel linguistik yaitu kanan (R), kanan-tengah (RC), tengah (C), kiri tengah (LC) dan kiri (L). Himpunan fuzzy arah truk terbagi menjadi 7 variabel linguistik, yaitu kanan-bawah (RD), kanan (R), kanan-atas (U), atas (U), kiri-atas (LU), kiri (L) dan kiri-bawah (LD). Sedangkan himpunan
fuzzy arah setir terbagi menjadi 7 variabel linguistik, yaitu positif-besar (PB), positif-sedang (PM), positif kecil (PS), nol (Z), negatif-kecil (NS), negatif-sedang (NM) dan negatif-besar (NB.)
Fungsi keanggotaan fuzzy dari variabel masukan dan keluaran yang digunakan ditunjukkan pada Gambar 6 - Gambar 8.
Gambar 6. Fungsi keanggotaan untuk posisi truk
Gambar 7. Fungsi keanggotaan untuk arah truk
Gambar 8. Fungsi keanggotaan untuk arah setir
Karena terdapat lima variabel linguistik untuk posisi truk dan tujuh variabel liguistik untuk arah truk, maka akan terdapat 35 kaidah yang akan digunakan. Karena hanya terdapat dua variabel masukan pada fuzzy, maka basis kaidah yang digunakan dapat didokumentasikan dalam bentuk matriks seperti yang ditunjukkan pada Gambar 9 dan Gambar 10. Setiap kombinasi dari baris dan kolom masukan akan menunjukkan variabel keluaran yang berkaitan. Sebagai contoh jika masukan posisi truk adalah C dan arah truk adalah RU, maka konsekuensnya adalah PS.
Truck Orientation
LD L LU U RU R RD
Tr
uc
k
Position
L NS PS PM PM PB PB PB
LC NM NS PS PM PM PB PB
C NM NM NS Z PS PM PM
RC NB NB NB NM NM NS NS
R NB NB NB NM NM NS NS
Gambar 9. Kaidah-kaidah pada Fuzzy Backward Truck Module
Truck Orientation
LD L LU U RU R RD
Tr
uc
k
Position
L PB PB PM PM PS NS NB
LC PB PB PM PM PS NS NM
C PM PM PS Z NS NM NM
RC PM PS NS NM NM NB NB
R PM PS NS NM NM NB NB
Gambar 10.Kaidah-kaidah pada Fuzzy Forward Truck Module
5.
Simulasi
Hasil simulalsi T2FC ditunjukkan pada Gambar 11 dan Gambar 12. Gambar 11 menunjukkan hasil trajektori untuk posisi awal
, dan . Waktu
untuk parkit membutuhkan 78 satuan. Gambar 12 menunjukkan hasil trajektori untuk posisi awal
, dan . Waktu untuk
parkit membutuhkan 72 satuan.
Gambar 11.Trajektori truk menggunakan T2FC dari posisi awal (-20,18.4,60o)
Gambar 12 Trajektori truk menggunakan T2FC dari posisi awal (17.5,8,162o)
Gambar 13 menunjukkan hasil simulasi dari pengendali fuzzy bertipe 1 untuk kondisi yang sama dengan Gambar 11, tetapi waktu yang dibutuhkan adalah 93 satuan. Sedangkan Gambar 14 menunjukkan hasil simulasi dari pengendali fuzzy bertipe 1 untuk kondisi yang sama dengan Gambar 12, dengan waktu yang dibutuhkan adalah 86 satuan.
Hasil simulasi ini menunjukkan keunggulan dari pengendali fuzzy bertipe 2 dimana bisa menghasilkan trajektori yang lebih halus. Hal ini mengakibatkan waktu yang dibutuhkan truk ke terminal menggunakan pengendali fuzzy bertipe 2 lebih cepat dari pada menggunakan pengendali
fuzzy bertipe 1.
Gambar 13.Trajektori truk menggunakan T1FC dari posisi awal (-20,18.4,60o)
Gambar 14 Trajektori truk menggunakan T1FC dari posisi awal (17.5,8,162o)
Tetapi waktu komputasi dari pengendali
fuzzy bertipe 2 (T2FC) lebih kompleks dari pengendali fuzzy bertipe 1 (T1FC). Tabel 11 menunjukkan perbandingan antara waktu komputasi T2FC dibandingkan T1FC. Maka T2FC lebih lambat 1,8 kali dibandingkan T1FC. Dan dalam aplikasinya, T2FC membutuhkan 1788 unit memori, dimana T1FC hanya membutuhkan 1303 unit memori.
Tabel 1. Waktu Komputasi Waktu komputasi
rata-rata (micro detik) Pengendali Fuzzy Bertipe 1
(T1FC)
18750
Pengendali Fuzzy Bertipe 2 (T2FC)
33854
6.
Kesimpulan
Pengendali fuzzy bertipe-2 telah
dipresentasikan untuk menyelesaikan masalah
Waktu parking yang dibutuhkan oleh T2FC 16% lebih cepat daripada T1FC. Tetapi waktu komputasi Logika Fuzzy bertipe 2 lebih kompleks daripada Logika Fuzzy bertipe 1, T2FC lebih lambat 1,8 kali daripada T1FC. Pada aplikasinya T2FC membutuhkan 1788 unit memori, sedangkan T1FC hanya membutuhkan 1303 unit memori.
Daftar Pustaka
[1] D. Nguyen and B. Widrow, “The Truck Backer-Upper: An Example of Self-Learning in Neural Network”, IEEE Contr. Syst. Mag., vol. 10, no. 2, pp. 18-23, 1990
[2] E. S. Plumer, “Neural Network Structure for Navigation Using Potential Fields”, in Proc. IJCNN092 Int. Joint Conf. Neural Networks, vol. 1, pp 327-332, 1992
[3] B. Wang, H. Kinjo, K. Nakazono and T. Yamamoto, “Design of Backward Movement Control for a Truck System with Two Trailers Using Neurocontrollers Evolved by Genetic Algorithms”, Transactions of the Institute of Electrical Engineers of Japan, Vol. 123, no. 5, pp. 983 – 990, 2003
[4] A. Riid and E. Rustern, ”Fuzzy Logic in Control : Truck Backer-Upper Problem Revisited”, Proc. 10th IEEE International Conference on Fuzzy Systems, Melbourne, Bol. 1, pp 513 – 516, 2001
[5] S.-G. Kong and B. Kosko, “Comparison of Fuzzy and Neural Truck Backer-Upper Control Systems”, in Proc. IJCNN-90, vol. 3, pp 349 – 358, 1990
[6] Pourya Shahmaleki, Mojtaba Mahzoon,
Designing a Hierarchical Fuzzy Controller for Backing-up a Four Wheel Autonomous Robot, American Control Conference, pp. 4893 – 4897, 2008
[7] S.-G. Kong, B. Kosko, “Adaptive Fuzzy Systems for Backing up a Truck and Trailer”, IEEE Trans. On Computational Intelligence, pp. 720-723, 1992
[8] L.-X. Wang and J. M. Mendel, “Generating Fuzzy Rules by Learning From Example”, IEEE Trans. On System, Man, and Cybernetics, vol 22, no. 6, pp. 1414 – 1427, 1992
[9] Jerry M. Mendel, “Type-2 Fuzzy Sets and Systems : An Overview”, IEEE Computational Intelligence Magazine, vol 2, no. 1, pp. 20-29, 2007
[10] N.N. Karnik and J.M. Mendel, “Introduction to Type-2 Fuzzy Logic Systems”, University of Southern California, 1998
[11] J. L. Chaneau, M Gunaratne and A.G. Altschaeffl, “An Application of Type-2 Sets to Decision Making in Engineering”, Analysis of Fuzzy Information – Vol. II: Artificial Intelligence and Decision Systems, 1987
[12] M. Wagenknecht and K. Hartmann,
“Application of Fuzzy Sets of Type 2 to The Solution of Fuzzy Equation Systems”, Fuzzy Sets Syst., vol. 25, pp 183-190, 1988
[13] K.C. Wu, “Fuzzy Interval Control of Mobile Robots”, Comput. Elect. Eng., vol. 22, no. 3, pp. 211-229, 1996
[14] R.I. John, P.R. Innocent and M.R. Barnes,
“Type 2 Fuzzy Sets and Neuro-Fuzzy Clustering of Radiograhic tibia images”, Proc. IEEE Int. Conf. Fuzzy Systems, pp 1373 – 1376, 1998
[15] Qilian Liang and Jerry M. Mendel, “An Introduction to Type-2 TSK Fuzzy Logic Systems”, IEEE International Fuzzy System Conference Proceedings, pp 1534 – III-1539, 1999
[16] Salman Mohagheghi, “An Interval Type-II Robust Fuzzy Logic Controller for a Static Compensator in a Multimachine Power System”, International Joint Conference on Neural Networks, pp. 2242 – 2244, 2006 [17] Jerry M. Mendel and Hongwei Wu, “New
Results About the Centroid of An Interval Type-2 Fuzzy Set, Including the Centroid of a Fuzzy Granule”, Information Sciences an International Journal, pp 360 – 377, 2007 [18] L.X. Wang and J.M. Mendel, “Generating
Fuzzy Rules from Numerical Data, With Application”, USC SIPI Rep. no. 169, Univ. Southern Calif., Los Angeles, 1991
Riwayat Penulis
Nama : Muhammad Aria HP : +62 813 212 71554
Alamat : Haruman no 8, Malabar, Bandung 40262
Kantor : UNIKOM Dipati Ukur 112
Email: [email protected]
Muhammad Aria
Jurnal Tekno Insentif Kopwil4, Volume 5 No. 2, Oktober 2011
ISSN: 1907 - 4964, halaman 9 s.d 15
PENGARUH BENTUK PENGUAT (
WIND BRACE
) PADA MENARA
Studi Kasus Menara Segi Tiga Berpenumpu-Sendiri (
Self-Support
)
Oleh:
Nefli Yusuf
Teknik Mesin, STT Mandala Bandung
Abstrak
– Menara berpenumpu sendiri banyak digunakan untuk menumpu antena telekomunikasi disamping juga kadang digunakan untuk menumpu wadah (torn) air. Untuk meminimumkan berat baja profil yang digunakan, sesuai dengan beban utama yang akan disangga, maka penguat antara tiang utama diikat dengan bentuk penguat yang bermacam-macam. Bentuk penguat ini akan berpengaruh terhadap distribusi aliran gaya pada struktur, akhirnya mempengaruhi kekakuan menara dan tegangan elemen batangnya. Pada makalah ini akan dibandingkan pengaruh bentuk penguat terhadap kekakuan menara dan tegangan elemen batang tiang utama akibat beban luar. Bentuk penguat yang disimulasikan menyangkut tiga bentuk standar yaitu: bentuk selempang, silang dan segi tiga. Sedangkan beban luar terdiri dari: gaya vertikal, gaya horizontal dan momen puntir di puncak menara yang perhitungannya menggunakan metoda elemen hingga (finite element method). Struktur mempunyai pembagian segmen dengan ketinggian sama. Struktur terbuat dari baja profil pipa dengan diameter bervariasi, semakin kebawah semakin besar diameter pipanya karena menumpu beban lebih besar. Hasil simulasi menunjukkan bahwa model penguat silang memberikan massa, kekakuan dan tegangan tekan elemen batang yang terbaik, tetapi terjadi beda tegangan yang cukup besar diantara sambungan elemen batang tiang utamanya.Kata Kunci
: menara berpenumpu sendiri, bentuk penguat, tegangan dan kekakuanAbstract –
Self-support tower is widely used to place the telecommunications antenn, and also is used to place the water-torn. To minimize the weight of steel profile, in accordance with the main load of the wind brace to be supported between the main poles, is tied by various wind brace form. The shape of this wind brace will affect to the distribution of flow-forces on the structure, finally will affect the tower rigidity and rod element stress. In this paper will be compared the influence of wind-brace form to the tower rigidity and rod element stress due to external loads. Wind brace form that was simulated involves three standard forms, namely: an oblique, cross and triangle. While the external load consisted of vertical force, horizontal forces and torques at the top of the tower and calculated using finite element method. This structure has the same height of segments. The structure is made of steel pipes profile with varies diameters, the more downward the greater of pipe diameter because it will support a larger load. The simulation results show that wind brace of cross model gives the best value of mass, rigidity and compress stress of element rods, but there was a large stress difference between the connection elements of the main pole rods.Keywords: self support tower, wind brace form, stress and rigidity
1. Pendahuluan
Pada mulanya perhitungan terhadap kekuatan menara dilakukan secara manual dengan menganggap menara sebagai sebuah batang kantilever. Nilai besaran gaya dan momen yang terjadi ditransformasikan terhadap tiang utama dengan memperhatikan lebar bentangannya. Sedangkan pendistribusian beban akibat pengaruh bentuk penguat sulit untuk diperkirakan atau dihitung secara manual, ditambah lagi dengan akumulasi pengaruh perpindahan posisi beban yang juga mempengaruhi momen pada tumpuan. Untuk itu diperlukan suatu metoda agar perhitungan dapat dilakukan secara lebih teliti.
besarpun juga dapat diatasi dengan penyederhanaan dan identifikasi model yang mewakili.
Bentuk penguat yang akan dibandingkan dapat dilihat pada Gambar 1, Gambar 1a berbentuk selempang, sedangkan untuk Gambar 1b berbentuk silang x, sedangkan Gambar 1c berbentuk segitiga.
Ketiga bentuk diatas dimodelkan pada menara ketinggian 55 meter dengan membaginya menjadi 26 segmen. Selanjutnya ketiga model ini disimulasi menggunakan perangkat lunak ANSYS 5.4 untuk mencari pengaruh gaya horizontal, gaya vertikal dan momen puntir pada puncak menara terhadap defleksi yang dianggap sebagai parameter kekakuan serta tegangan tekan pada kaki utama yang mencerminkan aliran beban pada tiang utama. Bahan dan profil pipa ketiga model dibuat sama untuk setiap segmennya.
2. Landasan Teori
Perhitungan dilakukan dengan asumsi bahwa beban yang diberikan merupakan beban statik. Setiap elemen batang diwakili oleh matrik elemen kekakuan dengan variabel beban dan defleksi. Selanjutnya perhitungan dilakukan dengan menggunakan program komputasi metoda elemen hingga (Finite Element Methode). Rangka menara tersusun atas gabungan batang lentur (beam) dalam ruang tiga dimensi menggunakan koordinat
Cartesian dengan sumbu X, Y dan Z. Sedangkan beban diberikan terhadap titik puncak yang terletak di pertengahan segmen..
Untuk kondisi statik harga beban (gaya dan torsi, disebut juga momen putar/momen rotasi), perpindahan, tegangan dan regangan dihitung dengan menyelesaikan persamaan hukum Hookes
berikut [4].
{ }
F
=
[ ]
K
{ }
δ
dan{ }
σ
=
[ ]
D
{ }
e
Dengan:{F} adalah vektor gaya dan momen [K] adalah kekakuan batang
{δ} adalah vektor perpindahan {σ} adalah vektor tegangan [D] adalah matrik elastisitas {e} adalah vektor regangan
Perhitungan pembebanan statik berguna untuk menentukan perpindahan dan tegangan setiap elemen batang yang selanjutnya dibandingkan terhadap fenomena yang terjadi pada batang utama akibat dari bentuk penguat (wind brace).
Penggunaan software Ansys dilakukan dengan tiga langkah berikut: membuat model [PREP7], memberi beban dan tumpuan [SOLU] dan mengkaji hasil simulasi [POST]. Pada PREP7 dilakukan pendefinisian elemen, dimensi, sifat bahan dan model geometri, setelah lengkap dilakukan perhitungan SOLU sesuai jenis formulasi yang diinginkan. Pada bagian ketiga dibutuhkan keterampilan untuk memunculkan parameter yang ingin dianalisis, yang berhubungan dengan keluaran umum POST1 dan yang berhubungan dengan time history POST26 [1]. Disarankan untuk memahami formulasi metoda elemen hingga terlebih dahulu sebelum menggunakan software.
3. Data dan Perhitungan
Menara yang dikaji mempunyai spesifikasi sebagai berikut: tinggi 55 m dengan bentangan (lebar) menara dipuncak dan di landasannya sama sehingga kemiringan tiang utama juga akan sama; bahan pipa baja diameter 2–4 inch, semakin kebawah semakin besar dengan setiap segmennya terbuat dari ukuran pipa yang sama. Bahan terbuat dari baja SS-55 dengan sifat mekanik sbb. [5]; modulus elastisitas (E) sebesar 2,1x106 [kg/cm2], modulus elastisitas geser (G) 0,81 x106 [kg/cm2],
poison ratio (ν) 0,3, dan massa jenis (γ) adalah7,85 [kg/dm3].
Hasil perhitungan menunjukkan bahwa terjadi perbedaan massa dan centriod untuk masing masing tipe seperti terlihat pada Tabel 1.
Tabel 1. Massa dan centroid masing-masing tipe menara
Tipe selempang (model 1) mempunyai massa yang paling kecil serta centroid terendah, tipe segi tiga memiliki massa dan centroid terbesar, sedang perbedaan massa dan centroid dari tipe silang dan segi tiga tidak begitu signifikan.
Gambar 1. Model bentuk penguat
(b) (c)
Gambar 1. Model menara dengan penguat selempang
Pada makalah ini hanya ditunjukkan model menara dengan penguat selempang (Gambar 1) yang merupakan hasil keluaran dari permodelan menggunakan software ANSYS 5.4. Untuk tipe penguat silang dan segi tiga kira-kira bentuknya akan mirip, hanya penguatnya akan lebih ramai. Pondasinya diberi tumpuan jepit yang dapat menahan gaya dan momen, sedangkan puncaknya diberi beban. Gambar model kurang bagus sehingga tanda tumpuan dan beban kurang terlihat jelas, rangka berwarna hitam tumpuan berwarna orange dan gaya berwarna biru.
Pengaruh beban yang diberikan kepada ketiga model penguat menara, model selempang, silang dan segi tiga dengan variasi beban vertikal, horizontal dan momen puntiran. Beban yang diberikan yaitu beban gaya vertikal kebawah sebesar 500 N, gaya horizontal sebesar 50 N dan momen puntiran sebesar 50 Nm. Nilai defleksi pada puncak menara, merupakan defleksi yang terbesar, yang terjadi untuk ketiga variabel beban dan bentuk menguat dapat dilihat pada Tabel 2.
Lambang F menunjukkan gaya, M adalah momen sedangkan y dan z menunjukkan arah koordinat. Arah beban yang diberikan diupayakan supaya terjadi beban tekan pada tumpuan batang, dimana menara diasumsikan kritis terhadap beban tekan karena nantinya akan terjadi kegagalan tekuk (buckling).
Tabel 2. Defleksi di puncak menara akibat beban
model Fy 500 N Fz 50 N My 50 Nm [mm] [mm] [mm]
1 1.43 2.20 1.18 2 0.92 1.59 0.80 3 1.56 2.09 1.34
Model silang memberikan hasil yang paling kecil terhadap variasi beban diatas, sedangkan bentuk penguat segi tiga adalah yang terlemah, kecuali untuk pengaruh gaya horizontal bentuk penguat segi tiga lebih baik dari bentuk penguat selempang.
Perlu juga ditegaskan bahwa kaki menara ini terbuat dari pipa dengan dimensi yang sama untuk ketiga macam tipe. Yang berbeda hanyalah bentuk penguat (wind brace) sedangkan dimensi penguat pada setiap segmennya terbuat dari pipa dengan diameter yang sama.
dimaksudkan agar sesuai dengan fenomena gagal yang diasumsikan.
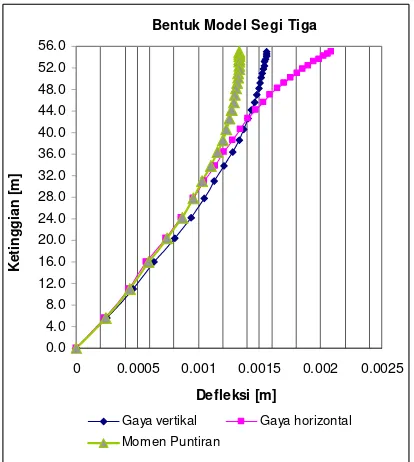
Hasil perhitungan simulasi terhadap defleksi untuk satu tiang utama diperlihatkan pada Gambar 2, 3, dan 4 defleksi yang ditunjukkan adalah akumulasi defleksi, penjumlahan vektor, dalam arah sumbu x, arah sumbu y dan arah sumbu z. Distribusi defleksi dalam arah x, y dan z pada ketiga model memberikan bentuk yang mirip kecuali untuk model 1 dimana defleksi pada bagian tengah menara cukup membesar.
Bentuk Model Selempang
0.0
0 0.0005 0.001 0.0015 0.002 0.0025
Defleksi [m]
Gaya vertikal Gaya horizontal Momen Puntiran
Gambar 2. Kurva defleksi terhadap ketinggian dari model selempang
Bentuk Model Silang
0.0
0 0.0005 0.001 0.0015 0.002 0.0025
Defleksi [m]
Gaya vertikal Gaya horizontal Momen puntiran
Gambar 3. Kurva defleksi terhadap ketinggian dari model silang
Bentuk Model Segi Tiga
0.0
0 0.0005 0.001 0.0015 0.002 0.0025 Defleksi [m]
Gaya vertikal Gaya horizontal
Momen Puntiran
Gambar 4. Kurva defleksi terhadap ketinggian dari model segi tiga
Karena Tabel 2 dan Gambar 2, 3, 4 merupakan penjumlahan vektor maka Tabel 3. diperlihatkan kuantitas dari nilai perpindahan akibat dari beban, gaya vertikal Fy, gaya horizontal Fz dan momen My, untuk model 1, model 2 dan model 3. defleksi arah x dan z untuk model 1 cukup mencolok dibandingkan dengan yang ada pada model 2 dan model 3.
Tabel 3. Defleksi titik puncak dalam arah x,y dan z
Model Beban Defleksi dalam Arah x [µm] y [µm] z [µm]
Tegangan Tekan Batang Utama
Gambar 5. Kurva tegangan terhadap ketinggian beban vertikal
Tegangan Tekan Batang Utama FZ 50 N
Gambar 6. Kurva tegangan terhadap ketinggian beban horizontal
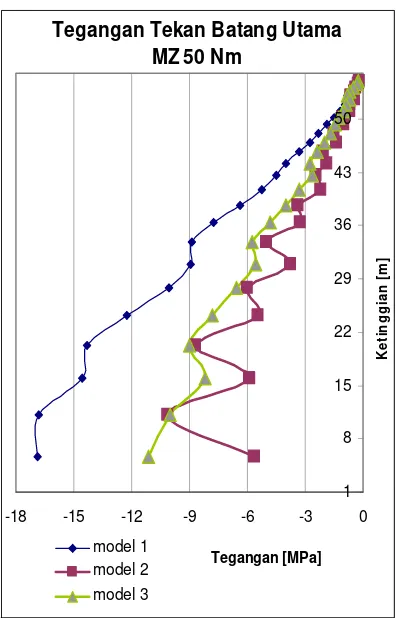
Tegangan Tekan Batang Utama MZ 50 Nm
Gambar 7. Kurva tegangan terhadap ketinggian beban horizontal
Nilai yang terjadi pada batang yang menumpu pondasi dapat dilihat pada Tabel 4. Perbedaan terjadi pada digit di belakang koma, keadaan ini memang disengaja untuk mendapatkan pengaruh tegangan yang terjadi pada batang yang sama dari ketiga macam gaya tersebut.
Tabel 4. Tegangan tekan yang terjadi pada tumpuan (kaki menara)
Beban Model 1 Model 2 Model 3 [MPa] [MPa] [MPa]
Fy 500 N -17.05 -5.64 -11.25
Fz 50 N -17.30 -5.92 -11.50
My 50 Nm -16.89 -5.60 -11.11
4. Analisis dan Pembahasan
rendah sebesar 11 mm. Dari segi struktur nilai massa yang lebih ringan lebih baik berhubungan dengan material yang digunakan, begitu juga ketinggian centroid dimana lebih rendah akan membuat struktur lebih stabil.
Kekakuan dari model 2 lebih baik dari model 1 maupun model 3 terlihat dari nilai perpindahan puncak menara pada Tabel 2., lebih lanjut akan terlihat pada Gambar 2, 3 dan 4. Menara dengan penguat selempang, Gambar 4, terjadi lendutan yang besar pada pertengahan menara. Hal ini disebabkan oleh penguatnya yang sejajar mengakibatkan puntiran pada batang utama walaupun diberi beban gaya vertikal dan gaya horizontal. Keadaan ini dipengaruhi oleh distribusi gaya untuk arah horizontal (dalam arah x dan z), Tabel 3., cukup besar sehingga defleksinya juga besar dibandingkan dengan model 2 dan 3. Dapat dikatakan bahwa pembebanan untuk model 1 sudah masuk ke daerah modus getaran ke dua sedang untuk pembebanan untuk model 2 dan 3 masih dalam modus pertama. Untuk bentuk penguat model 2 dan model 3 pada intinya sama hanya saja model 2 lebih kaku karena ada penerusan gaya langsung dari satu kaki ke kaki lainnya sedangkan untuk model 3 tidak langsung, Gambar 1.
Kekakuan akibat beban horizontal memberikan fenomena yang berbeda dengan fenomena akibat beban vertikal dan beban momen, dimana beban horizontal akan memberikan defleksi yang semakin memperbesar pada puncak menara. Dengan kata lain slope perpindahan didaerah puncak cukup sensitif, sehingga dapat dikatakan bahwa menara kritis terhadap beban horizontal dibanding beban vertikal ataupun beban momen, Gambar 5.
Tegangan pada elemen batang dapat dilihat pada Gambar 5, 6 dan 7 untuk masing-masing beban yang diberikan. Bentuk distribusi aliran gaya dari elemen yang di puncak sampai ke tumpuan mirip untuk ke tiga macam beban. Hal ini dapat dimaklumi karena beban luar yang diberikan berasal dari pertengahan bidang puncak menara. Garis tegangan sedikit bergelombang hal ini disebabkan oleh perubahan ukuran batang yang digunakan, makin ke bawah ukuran batang pipa yang dipakai makin besar. Pada perubahan ukuran akan terjadi penurunan/kenaikan tegangan. Hal yang menarik terjadi pada model 2 dimana terjadi perbedaan tegangan yang cukup mencolok diantara batang utama yang satu dengan yang di atas atau di bawahnya, Gambar 5, hal ini disebabkan karena pemindahan aliran gaya antar kaki utama pada ketiga kaki menara. Pada Tabel 4 terlihat perbedaan tegangan yang mencolok untuk model 2 tetapi kalau diambil batang yang berikutnya perbedaan antara model 2 dan model 3 tidak begitu besar berkisar 10%.
Kekakuan maupun kekuatan model 2 lebih baik dari model 1 dan model 3, tetapi ada
perbedaan tegangan yang cukup besar diantara elemen batang utama satu dengan yang diatas atau yang di bawahnya. Untuk selanjutnya perlu dilakukan analisis apakah perbedaan tegangan ini akan berakibat buruk terhadap beban yang berubah atau beban dinamik?
5. Kesimpulan dan Saran
Sebagai kesimpulan dari menara dengan bentangan pondasi segi tiga ini dapat diperoleh kesimpulan yaitu:
- Bentuk penguat model 1 memiliki massa yang lebih kecil sebesar 477,91 kg tetapi kekatannya berkurang sebesar 50%-nya.
- Kekakuan batang utama dari bentuk penguat model silang (2) sedikit lebih baik dari model segi tiga (3) begitu juga dengan massa batang sedikit lebih kecil.
- Tegangan batang utama yang terjadi pada model 2 juga lebih baik dari model 3, hanya saja perubahan besaran tegangan di batang utama cukup besar untuk elemen satu dengan elemen disampingnya.
Sebagai saran diperlukan analisis terhadap fenomena tegangan yang zigzag yang terjadi pada batang utama model 2. Apakah berpengaruh besar terhadap perubahan pembebanan atau beban dinamik.
6. Kepustakaan
[1] ---, (1997) “Commands Reference Release 5.4” 9th edition, SAS IP, Inc.
[2] ---,(1997) “Ansys Basic Analysis Procedure Guide 000856 Release 5.4” 2nd edition, SAS IP, Inc.
[3] Cook, R.D, (1981) “Concepts and Application of Finete Element Analysis”2nd edition, John Willey &Sons, New York.
[4] Kohnke, P.,(1997) “Ansys Theory Reference. 000855 Release 5.4” 8th edition, SAS IP, Inc.
[5] Niemann, G.,(1978), Machine Elements: Design and Calculation in Mechanical Engineering Volume II”, Springer-Verlag, Berlin Heidelberg New York.
7. Riwayat Penulis
Ir. H. Nefli Yusuf, M.Eng. adalah dosen Kopertis Wilayah IV yang diperbantukan (dpk.) pada STT Mandala. Jl. Soekarno-Hatta No. 597 Bandung. Lulusan program S1 Teknik Mesin ITB Bandung
Jurnal Tekno Insentif Kopwil4, Volume 5 No.2, Oktober 2011
ISSN: 1907-4964, halaman 16 s.d. 27
ALGORITMA
SEQUENTIAL INSERTION
UNTUK MENGATASI MASALAH RUTE
KENDARAAN
DENGAN
BACKHAUL
, RUTE MAJEMUK DAN
TIME WINDOW
Oleh:
Johan Oscar Ong
Teknik Industri, Institut Teknologi Harapan Bangsa
Abstrak -
Efisiensi dan efektifitas dalam suatu sistem rantai suplai merupakan kunci utama perusahaan dalam meningkatkan daya saing. Dalam struktur biaya suatu sistem rantai suplai, biaya transportasi mendominasi keseluruhan biaya yang dikeluarkan. Perencanaan yang baik akan memberikan penghematan yang signifikan terhadap total biaya yang dikeluarkan perusahaan. Makalah ini menyajikan solusi dengan penyisipan sekuensial dari masalah penentuan rute kendaraan yang mempertimbangkan adanya backhaul, rute majemuk, dan jendela waktu (VRP with backhauls, multiple trips, and time window, VRPB-MTTW). Solusi yang dihasilkan dalam model ini menggunakan empat kriteria awal dalam pemilihan pelanggan awal, yaitu earliest deadline, earliest ready time, shortest time window, dan longest travel time. Solusi akhir model VRP ini digunakan multi kriteria, yaitu jumlah kendaraan yang dibutuhkan, waktu durasi total, dan range of duration time dengan melakukan pemeriksaan terhadap kendala kapasitas kendaraan dan jendela waktu. Hasil pengujian dengan 9 data hipotetik menunjukkan kriteria awal earliest deadline menghasilkan solusi yang lebih baik dari kriteria pelanggan awal lainnya dengan melihat nilai rata-rata jumlah kendaraan paling kecil dibandingkan dengan ketiga kriteria lainnya.Kata kunci:
masalah rute kendaraan, penyisipan sekuensial, backhaul, rute majemuk, jendela waktuAbstract -
Efficiency and effectiveness in a supply chain system is a key element in improving enterprise competitiveness. In the cost structure of a supply chain system, transportation costs dominate the overall cost. Good planning will deliver significant savings to the total cost incurred by the company. This paper presents a solution to the sequential insertion of vehicle routing problem that considers the backhaul, multiple trips, and time window (VRP with backhauls, multiple trips, and time window, VRPB-MTTW). Solutions produced in this model uses four criteria in the selection of early customers, ie earliest deadline, earliest ready time, shortest time window, and longest travel time. Final solution is to use multi-VRP model criteria, ie the number of vehicles required, total duration of time, and the range of duration time to conduct an examination of the vehicle capacity constraints and time window. Test results with the 9 hypothetical data showing the initial criteria earliest deadline produce better solutions than other early customer criteria that have the smallest value of average number of vehicle.Keywords:
vehicle routing problem, sequential insertion, backhaul, multiple trips, time window.1.
Pendahuluan
Dalam struktur biaya suatu sistem logistik, komponen biaya transportasi mendominasi keseluruhan biaya yang dikeluarkan. Dalam sebuah laporan yang disiapkan oleh National Council of Physical Distribution Management (NCPDM), Kearney (1984) mengestimasi biaya distribusi di US sebesar $650 milyar dalam setahun [1].
Efisiensi pada biaya transportasi akan memberikan kontribusi pada penurunan ongkos total yang pada akhirnya akan memberikan peningkatan daya saing perusahaan. Oleh karena itu, diperlukan suatu solusi untuk menekan biaya transportasi dengan menggunakan kapasitas kendaraan. Setelah kendaraan melakukan pengantaran maka kapasitas kendaraan dapat digunakan untuk melakukan pengambilan barang. Salah satu permasalahan perencanaan transportasi
adalah penentuan rute dan jadwal kendaraan yang secara umum dikenal dengan istilah masalah penentuan rute kendaraan (vehiclerouting problem).
Vehicle Routing Problem atau VRP berkaitan dengan penentuan rute optimal untuk permasalahan lebih dari satu kendaraan dengan kapasitas tertentu untuk mengunjungi sejumlah pelanggan dengan permintaannya masing-masing [3].
yang mengakomodasi permintaan pengantaran dan pengambilan barang setiap pelanggan dikenal dengan istilah vehicle routing problem with pickup delivery (VRPPD) [4]. Varian yang khusus membahas pemisahan antara pelayanan pengantaran dan pengambilan dikenal dengan istilah vehicle routing problem with backhauls
(VRPB).
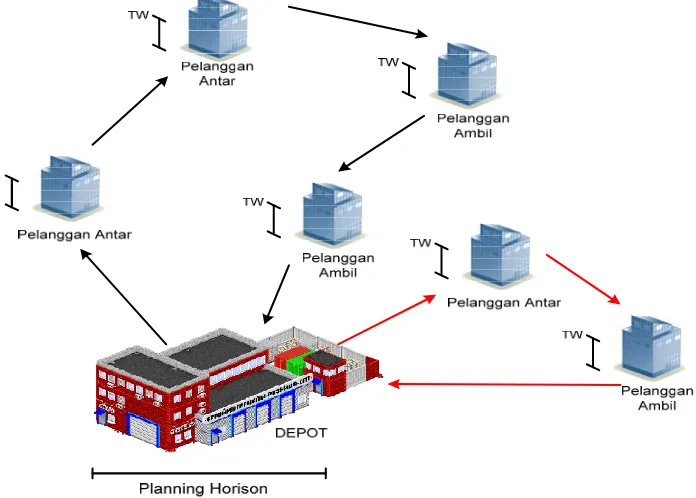
Menurut Oscar Ong dan Suprayogi, model VRPB ini harus disesuaikan dengan kondisi nyata dengan mempertimbangkan berbagai hal seperti rute majemuk dan jendela waktu atau dikenal dengan istilah vehicle routing problem with backhaul, multiple trips and time windows (VRPB-MTTW) [3]. Contoh nyata model ini adalah penentuan rute kendaraan yang dihadapi oleh distributor bahan kimia. Distributor mendistribusikan produk ke sejumlah agen-agen dan pedagang eceran yang tersebar dalam suatu wilayah serta melakukan pengambilan bahan kimia di sejumlah supplier. Pemisahan antara pengantaran dan pengambilan ini disebabkan adanya bahan kimia berbahaya yang tidak dapat disatukan dalam setiap kendaraan. Sejumlah kendaraan ditugaskan untuk melakukan pengantaran produk dan setelah pelanggan antar dilayani, maka kendaraan ditugaskan untuk melakukan pengambilan produk. Pelayanan yang dilakukan ini dalam selang waktu dan dalam suatu horison perencanaan tertentu, serta kendaraan diperkenankan bolak-balik ke distributor untuk bongkar-muat produk.
Tujuan dari makalah ini adalah untuk meminimalkan jumlah kendaraan dan durasi total untuk melayani semua pelanggan tanpa melanggar
kapasitas kendaraan dan batas waktu pelayanan (time window) setiap pelanggan [5].
2.
Model
Model yang digunakan adalah model konseptual untuk menentukan rute kendaraan dalam mendistribusikan produk yang mempertimbangkan prioritas pengambilan setelah pengantaran, rute majemuk, dan jendela waktu (Vehicle Routing Problem with backhauls, multi trips, dan time windows, VRPB-MTTW), yang diadopsi dari Oscar Ong dan Suprayogi [3].
Tujuan dari model VRPB-MTTW ini yaitu meminimisasi jumlah tur, meminimisasi waktu durasi tur total, meminimisasi range of duration time. Ketiga tujuan tersebut dipenuhi secara
lexicographic atau alphabetic order, dimana secara berurutan tujuan pertama memiliki prioritas yang lebih tinggi dibandingkan fungsi tujuan kedua dan ketiga. Secara lengkap, deskripsi model operasional dapat dilihat pada lampiran.
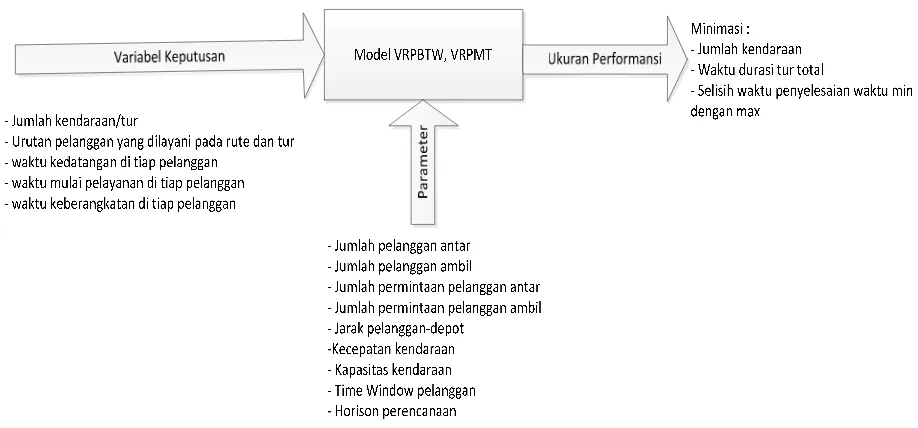
Variabel keputusan dalam model ini adalah jumlah tur, urutan pelanggan yang dilayani pada rute dan tur, saat kedatangan, saat dimulai pelayanan, saat akhir pelayanan dan saat keberangkatan pada tiap pelanggan. Parameter model terdiri dari jumlah pelanggan antar, jumlah pelanggan ambil, jumlah permintaan antar, jumlah permintaan ambil, jarak antar pelanggan dengan depot, kecepatan kendaraan, kapasitas kendaraan, jendela waktu pelanggan, dan horison perencanaan. Gambar 1 menunjukkan arsitektur sistem secara keseluruhan.
Beberapa pembatas-pembatas yang terdapat dalam masalah penentuan rute kendaraan ini adalah sebagai berikut [3]:
a) Tiap rute dimulai dan diakhiri pada depot, b) Kendaraan dibatasi horison perencanaan yang
menandai dimulai dan diakhiri aktivitasnya, c) Permintaan pelanggan dipisahkan antara antar
dan ambil serta bersifat deterministik dan diketahui,
d) Aktivitas pengantaran barang dilayani terlebih dahulu sebelum dilakukan pengambilan , e) Tiap pelanggan hanya dapat dikunjungi satu
kali oleh satu kendaraan,
f) Muatan kendaraan pada saat pengantaran dan pengambilan tidak melebihi kapasitas kendaraan,
g) Saat pelayanan hanya dapat dimulai pada saat paling awal dan sebelum atau sama dengan saat paling akhir,
h) Range of Duration Time (RDT) dalam penelitian ini adalah selisih waktu durasi terpanjang dan waktu durasi durasi terpendek.
Adapun asumsi-asumsi yang digunakan dalam model ini diantaranya:
a) Jenis kendaraan bersifat homogen dengan kapasitas tertentu,
b) Jumlah kendaraan tidak dibatasi,
c) Kecepatan dalam perhitungan merupakan kecepatan rata-rata kendaraan,
d) Jarak antar pelanggan simetris.
3.
Hasil dan Pembahasan
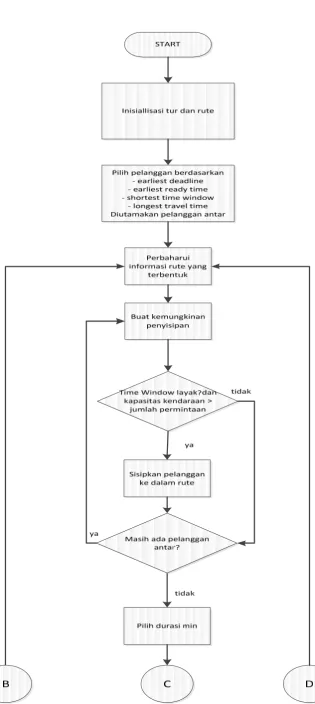
Adapun algoritma sequential insertion (SI) yang dimodifikasi dari Imawati [2] untuk permasalahan VRPB-MTTW adalah sebagai berikut:
Langkah 1
Input data jumlah pelanggan beserta permintaannya, interval waktu pelayanan, horison perencanaan, kapasitas kendaraan, kecepatan kendaraan, dan jarak antar pelanggan. Buat daftar pelanggan antar (i) dan daftar pelanggan ambil (i+n). Iterasi dimulai dari tur pertama (t=1) dan rute pertama (r=1) dimulai dari depot.
Gambar 2. Model Konseptual
Langkah 2
Selama masih ada pelanggan antar i yang belum dilayani, maka lanjutkan langkah ini. Bila semua pelanggan antar i sudah dilayani maka lanjutkan langkah 9. Untuk pertama kali, t=1 dan
r=1, pilih pelanggan antar yang belum dijadwalkan sebagai pelanggan awal (seed customer) berdasarkan kriteria tertentu. Kriteria pemilihan dalam penelitian ini yaitu earliest deadline, earliest ready time, shortest time window, longest travel time. Kemudian dilanjutkan pada langkah 4. Jika r
≠ 1 maka iterasi dilanjutkan ke langkah 3.
Langkah 3
Untuk setiap pelanggan antar i yang belum dijadwalkan, pilih waktu durasi minimum sebagai pelanggan awal untuk rute baru. Kemudian susun kemungkinan pelanggan antar i yang bisa disisipkan. Periksa jumlah permintaan antar rute saat ini. Jika pelanggan antar i memenuhi kapasitas kendaraan (Q), maka lanjutkan ke langkah 4. Sebaliknya lanjutkan langkah 7.
Langkah 4
hitung muatan saat keluar dari pelanggan i (Mij).
Kemudian lanjutkan ke langkah 5. Jika time window pelanggan i tidak layak maka kembali ke langkah 2, buat tur baru ( t+1) dan rute (r=1).
Langkah 5
Lakukan pembaharuan informasi mengenai rute dan tur yang terbentuk. Periksa apakah masih ada pelanggan antar i yang belum dilayani. Jika masih ada pelanggan antar i yang belum dijadwalkan maka kembali ke langkah 2. Jika semua pelanggan antar i telah dijadwalkan, maka lanjutkan langkah 6.
Langkah 6
Hitung waktu durasi tur dan rute yang telah terbentuk. Pilih waktu durasi tur minimum untuk menjadwalkan rute pelanggan ambil i+n. Perbaharui kembali informasi waktu tur minimum yang dipilih. Kemudian lanjutkan pada langkah 7.
Langkah 7
Periksa apakah ada pelanggan ambil i+n
yang belum dijadwalkan. Jika semua pelanggan ambil telah dijadwalkan, maka lanjutkan ke langkah 9. Jika masih ada pelanggan ambil yang belum dijadwalkan, maka buat kemungkinan penyisipan pelanggan ambil ke dalam rute. Periksa jumlah permintaan ambil rute saat ini. Jika pelanggan ambil i+n memenuhi kapasitas kendaraan (P), maka lanjutkan ke langkah 8. Jika permintaan pelanggan ambil i+n melampaui kapasitas kendaraan, maka buat rute baru , r=r+1 dan ulangi kembali langkah 7.
Langkah 8
Periksa kelayakan time window pelanggan ambil. Bila memenuhi, pelanggan ambil i+n
disisipkan dan kemudian hitung muatan saat kendaraan keluar dari pelanggan ambil i+n. Kemudian ulangi langkah 7.
Langkah 9
Hitung waktu durasi rute yang terbentuk. Pilih waktu durasi rute yang minimum. Jika semua pelanggan antar dan ambil telah dijadwalkan dan hentikan prosedur ini.
Adapun kesembilan langkah di atas dapat dilihat dalam flowchart pada Gambar 3 dan 4. Sistem akan mencari pelanggan antar terlebih dahulu sesuai dengan kriteria yang dipilih sebelumnya. Selanjutnya, menyisipkan pelanggan tersebut ke dalam rute awal (depot-depot). Setelah dilakukan pengecekan dan pelanggan antar tidak dapat memenuhi kelayakan time window maupun kapasitas kendaraan. Jika rute sementara memenuhi kelayakan, maka perbaharui informasi rute. Jika sebaliknya, maka sistem akan mencari apakah masih ada pelanggan antar yang belum dilayani. Jika ada, sistem akan memilih pelanggan antar kembali. Jika tidak ada, sistem mencari rute dengan durasi paling minimum dan mencari pelanggan ambil serta menyisipkan pelanggan ambil ke dalam rute yang telah terbentuk.
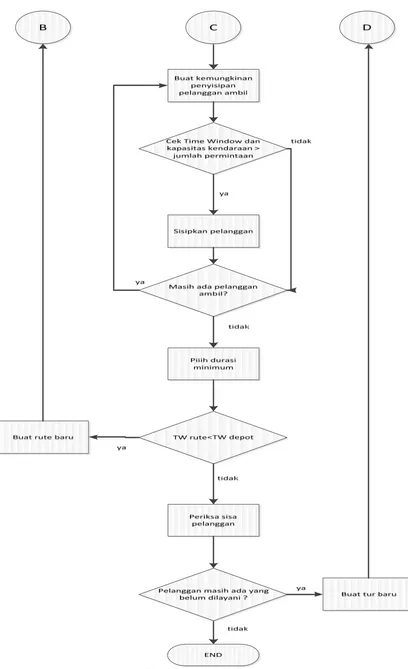
Kemudian sistem akan melakukan proses yang sama dengan pelanggan antar seperti mengecek kelayakan time window, kapasitas kendaraan, dan masih ada pelanggan ambil yang belum dilayani. Lalu, dilakukan pengecekan apakah
time window yang dimiliki rute masih memenuhi horison perencanaan. Jika masih, maka dapat dibentuk rute baru (multiple trips). Jika tidak maka akan dilakukan pengecekan masih adakah pelanggan yang belum dilayani. Jika masih ada, maka akan dibuat rute untuk kendaraan atau tur baru. Jika semua pelanggan telah dilayani, maka sistem akan berhenti.
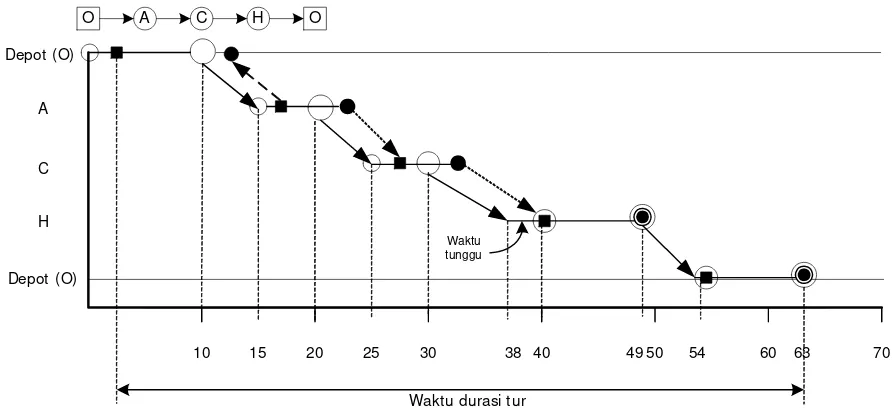
Dalam menentukan pelanggan yang akan dikunjungi digunakan forward pass. Sedangkan
backward pass digunakan untuk menghitung waktu durasi tur setelah forward pass. Kegunaan
backward pass ini adalah untuk mengoptimalkan efisiensi waktu setiap kendaraan, dimana waku tunggu kendaraan diminimumkan sehingga kendaraan datang pada konsumen tepat saat pelayanan dapat dimulai. Contoh penggunaan
forward passdan backward pass dapat dilihat pada Gambar 2.
Pengujian dilakukan dengan menggunakan data hipotetik yang dikelompokkan menurut jumlah pelanggan ambil (backhaul) serta time window
O A C H O
10 15 20 25 30 40 50 60
Depot (O)
A
H C
38 Depot (O)
49 54 63 70
Waktu tunggu
Waktu durasi tur
Gambar 2. Contoh Forward Pass dan Backward Pass
Contoh kasus yang digunakan dalam makalah ini terdiri dari 100 pelanggan dan sebuah depot. Pelanggan dibagi ke dalam dua bagian, antar dan ambil. Pengujian dilakukan kepada 9 data hipotetik yang terdiri dari 10% pelanggan backhaul
dengan durasi time window sempit, lebar, campuran, 30% pelanggan backhaul dengan 3 durasi time window yang berbeda, dan 50% pelanggan backhaul dengan ketiga kemungkinan durasi time window pula.
Tabel 1. Pengelompokkan data hipotetik
Sempit Lebar Campuran
10% Backhaul Sempit10 Lebar10 Campuran10
30% Backhaul Sempit30 Lebar30 Campuran30
50% Backhaul Sempit50 Lebar50 Campuran50
Jumlah Pelanggan Time Window
Terdapat empat kriteria yang digunakan untuk menentukan pelanggan awal antara lain:
1. Earliest Deadline merupakan pemilihan pelanggan berdasarkan batas akhir time window terkecil;
2. Earliest Ready Time merupakan pemilihan pelanggan dengan batas awal time window
terkecil;
3. Shortest Time Window merupakan pemilihan pelanggan dengan lebar time window terkecil;
4. Longest Travel Time merupakan pemiilhan pelanggan berdasarkan waktu perjalanan terlama dari depot.
Keseluruhan solusi awal yang dihasilkan dengan algoritma sequential insertion dapat dilihat pada Tabel 2. Dari tiga jenis time window yang dilakukan pengujian terdapat beberapa hasil diantaranya:
a. Untuk time window sempit kriteria kedua (Earliest ready Time) dinilai paling baik dikarenakan jumlah kendaraan (NV) 38; b. Sedangkan untuk pengujian time window
lebar kriteria pertama (Earliest Deadline) yang memiliki nilai paling baik dengan nilai jumlah kendaraan 25;
c. Untuk time window campur, Earliest Deadline m mempunyai nilai jumlah kendaraan 41;
d. Untuk time window rata-rata, aturan yang pertama (earliest deadline) memberikan rata-rata nilai fungsi tujuan yang terkecil untuk permasalahan VRPB-MTTW. Hal ini ditunjukkan dengan rata-rata jumlah kendaraan (tur) yang terkecil, dimana jumlah kendaraan (NV) rata-rata sebesar 10.67, Waktu durasi total (TDT) rata-rata sebesar 2103.12, dan range of duration
rata-rata sebesar 446.20;
Tabel 2. Perbandingan hasil solusi dengan algoritma Sequential Insertion
Aturan Sempit10 Sempit30 Sempit50 lebar10 lebar30 lebar50 campur10 campur30 campur50 Rata-rata S. deviasi
NV 19 12 9 12 9 4 12 12 7 10.67 4.18
TDT 2825.33 3010.45 2381.03 1562.08 1531.85 1519.8 2364.98 1920.74 1811.78 2103.12 566.58
RDT 416.01 478.04 490.36 449.79 435.27 400.26 467.91 453.59 424.59 446.20 29.81
NV 18 10 10 18 10 4 18 11 6 11.67 5.24
TDT 2547.11 2724.27 2363.78 1516.17 1535.12 1522.86 1835.78 1878.3 1824.21 1971.96 460.94
RDT 416.01 459.28 478.7 433.17 427.75 399.07 262.85 468.83 474.47 424.46 66.66
NV 20 14 12 18 9 4 17 16 12 13.56 4.95
TDT 2866.34 2652.79 2609.78 1542.77 1554.53 1512.42 1892.15 1780.19 1812.1 2024.79 534.26
RDT 374.23 431.94 426.21 413.38 441.37 349.65 433.49 423.82 418.4 412.50 30.45
NV 21 13 11 19 8 4 18 14 9 13.00 5.61
TDT 2873.27 2436.12 2721.78 1542.92 1567.13 1508.77 2446.74 2203.08 1805.71 2122.84 530.82
RDT 278.36 348.02 370.32 430.19 434.04 354.84 375.03 391.91 437.07 379.98 51.17
2
3
4 1
4.
Kesimpulan
Penelitian ini mengembangkan algoritma penyisipan sekuensial yang disesuaikan pada model VRPB-MTTW dengan kriteria pemilihan pelanggan awal yang berbeda-beda. Hasil yang diperoleh menunjukkan bahwa dengan metode ini dan kriteria
earliest deadline sebagai penetu pelanggan awal memiliki rata-rata jumlah kendaraan terkecil. Hal ini menyebabkan biaya transportasi yang dikeluarkan dapat ditekan. Penelitian selanjutnya dapat digunakan algoritma lain sebagai pembanding.
5. Daftar Pustaka
[1] GOETSCHALCKX, Mark and Charlotte JACOBS-BLECHA, “The vehicle routing problem with backhauls”, Material Handling Research Center, School of Industrial and System Engineering, Georgia Institute of Technology, Atlanta, USA.
[2] Imawati, D. " Pemecahan Vehicle Routing Problem with Multiple Trips and Time Window dengan Menggunakan Pendekatan Local Search dan Simulated Annealing", Tugas Akhir, Departemen Teknik dan Manajemen Industri Institut Teknologi, Bandung, 2004.
[3] Oscar ong, Johan dan Suprayogi, “Vehicle Routing Problem with Backhaul, Multiple Trips,
and Time Windows”, Proceeding of 4th International Seminar on Industrial Engineering and Management, vol.4 pp.143-151, 2010. [4] Suprayogi, Vehicle routing problem: definition,
variants, and application, Proceeding Seminar Nasional Perencanaan Sistem Industri 2003 (SPNS 2003), Bandung, 2003.
[5] Thangiah, Sam R. dan Tong Sun, “Heuristic Approaches to Vehicle Routing with Backhauls and Time Windows”, Artificial Intelligence and Robotics Laboratory, Computer Science Department Slippery Rock University, Slippery Rock, USA.
Riwayat Singkat Penulis
LAMPIRAN
Notasi Indeks:
t = tur (t = 1,2,...)
r = rute (r = 1,2,...)
k = posisi (k = 1,2,...)
i = titik (i = 0 adalah depot, i=1, 2,...,n adalah pelanggan antar,
i= n+1, n+2, ...,n+m adalah pelanggan ambil)
Variabel-variabel keputusan:
NT = jumlah tur
NR(t) = jumlah rute dalam tur t
NL(t,r) = jumlah posisi dalam rute r dari tur t
NLa(t,r) = jumlah posisi pelanggan antar dalam rute r dari tur t NLb(t,r) = jumlah posisi pelanggan ambil dalam rute r dari tur t L(t, r, k) = lokasi pada posisi k dalam rute r dari tur t
α (t, r, k) = saat kedatangan kendaraan pada titik di posisi k dalam rute r dari tur t
αe
(t, r, k) = saat kedatangan paling awal kendaraan pada titik di posisi k dalam rute r dari tur t
αl
(t, r, k ) = saat kedatangan paling akhir kendaraan pada titik di posisi k dalam rute r dari tur t
δ (t, r, k) = saat keberangkatan kendaraan pada titik di posisi k dalam rute r dari tur t
δe
(t, r, k) = saat keberangkatan paling awal kendaraan pada titik di posisi k dalam rute r dari tur t
δl
(t, r, k) = saat keberangkatan paling akhir kendaraan pada titik di posisi k dalam rute r dari tur t
σ (t, r, k) = saat mulai pelayanan kendaraan pada titik di posisi k dalam rute r dari tur t
σe
(t, r, k) = saat mulai pelayanan paling awal kendaraan pada titik di posisi k dalam rute r dari tur t
σl
(t, r, k) = saat mulai pelayanan paling akhir kendaraan pada titik di posisi k dalam rute r dari tur t w (t, r, k) = waktu menunggu kendaraan pada posisi k dalam rute r dari tur t
TD(t,r) = Total muatan yang diantar dalam rute r dari tur t TP(t,r) = Total muatan yang diambil dalam rute r dari tur t
TL(t, r, k) = Total muatan kendaraan pada posisi k dalam rute r dari tur t
s(t, r, k) = waktu bongkar-muat dari kendaraan pada posisi k dalam rute r dari tur t
Parameter:
t(i,j) = waktu perjalanan antara titik i dan j
e(i) = saat siap dari jendela waktu (time window) waktu pada titik i l(i) = saat akhir dari jendela waktu (time window) waktu pada titik i d(i) = permintaan pengantaran pada titik i (dengan d(0) = 0)
p(i) = permintaan pengambilan pada titik i (dengan d(0) = 0)
Q = kapasitas kendaraan γ = waktu pelayanan
n = jumlah pelanggan antar
m = jumlah pelanggan ambil
Ukuran performansi:
NV = jumlah kendaraan TDT = waktu durasi total
RDT = selisih antara waktu durasi total maksimum dengan minimum
Tiap lokasi L(t, r, k) untuk t, r, dan k tertentu merujuk pada suatu titik i, yaitu :
L(t, r, k)= i (1)
Untuk menjamin bahwa tiap titik hanya dikunjungi satu kali, maka tiap i hanya dapat muncul satu kali pada t, r
dan k tertentu, kecuali untuk i = 0 karena tiap rute diawali dan diakhiri oleh depot. Sehingga,
L(t, r, 0)= 0
t = 1,2, ...,NT ; r = 1,2,..., NR(t) (2) L[t, r, NL(t,r)]= i = 0
t = 1,2, ...,NT ; r = 1,2,..., NR(t) (3)
TD(t,r) =
t= 1,2, ...,NT ; r = 1,2,..., NR(t) (4)
TP(t,r) =
t= 1,2, ...,NT ; r = 1,2,..., NR(t) (5)
Total muatan yang terdapat dalam kendaraan pada saat pengantaran dan saat pengambilan di setiap lokasi dinyatakan dengan hubungan rekursif :
TL(t, r, k) = TL(t, r, k-1) - d(L(t, r, k))
t= 1,2, ...,NT ; r = 1,2,..., NR(t) ; k = 1,2,..., NLa(t,r) (6)
TL(t, r, k) = TL(t, r, k) + p(L(t, r, k)) t= 1,2, ...,NT ; r = 1,2,..., NR(t) ;
k = NLa(t,r) +1, NLa(t,r) +2,..., NLb(t,r) (7) dan
TL(t, r, k) = TD(t,r)
t= 1,2, ...,NT ; r = 1,2,..., NR(t) ; k = 1 (8)
TL(t, r, k) = 0
t= 1,2, ...,NT ; r = 1,2,..., NR(t) ; k = NLa(t,r) +1 (9)
Kelayakan kapasitas kendaraan dijamin dengan hubungan-hubungan sebagai berikut:
TD(t,r )≤ Q
t= 1,2, ...,NT ; r = 1,2,..., NR(t) (10)
TP(t,r ) ≤ Q
t= 1,2, ...,NT ; r = 1,2,..., NR(t) (11)
TL(t, r, k) ≤Q
t= 1,2, ...,NT ; r = 1,2,..., NR(t) ; k = 1,2,..., NL(t,r)-1 (12)
Saat kedatangan, mulai pelayanan dan keberangkatan paling awal pada suatu lokasi ditentukan dengan perhitungan maju sebagai berikut:
αe
(t, r, k) = δe (t, r, k) + t [L(t, r, k-1), L(t, r, k)]
t= 1,2, ...,NT ; r = 1,2,..., NR(t) ; k = 1,2,..., NL(t,r) (13)
σe
(t, r, k) = max {αe
(t, r, k), e(L(t, r, k)) }
t= 1,2, ...,NT ; r = 1,2,..., NR(t) ; k = 1,2,..., NL(t,r) (14)
δe
(t, r, k) = σe (t, r, k) + s(L(t, r, k))
t= 1,2, ...,NT ; r = 1,2,..., NR(t) ; k = 1,2,..., NL(t,r) (15)
dengan αe
(t, r, k) = 0
t= 1,2, ...,NT ; r = 1; k = 0 (16)
αe
(t, r, k) = δe (t, r-1, NL(t,r))
t= 1,2, ...,NT ; r = 1,2,..., NR(t) ; k = 0 (17)
Kelayakan jendela waktu dinyatakan dengan saat akhir pelayanan atau saat keberangkatan kendaraan yang paling awal pada setiap lokasi tidak boleh melewati saat akhir dari jendela waktu dari titik pada lokasi tersebut, yaitu:
δe
(t, r, k)≤l (L(t, r, k))
t= 1,2, ...,NT ; r = 1,2,..., NR(t) ; k = 0, 1,..., NL(t,r) (18)