168 | | Yogyakarta State University | Yogyakarta - Indonesia
DETEKSI FITUR DAN PENENTUAN LOKASI ROBOT
PEMAIN SEPAK BOLA BERBASIS PENANDA YANG
TIDAK UNIK
Ach Hadi Dahlan
Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember
Email: [email protected]
Muhtadin
Jurusan Teknik Multimedia & Jaringan Institut Teknologi Sepuluh Nopember
Email: [email protected]
.
Mauridhi Hery P
Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember
Email: [email protected]
Ilham Budiono
Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember
Email: [email protected]
Ilham Laenur H.
Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember Email: [email protected]
Abstract
This paper describe about feature extraction in RoboCup 2013 environment. The features are the ball, the goals and field line. By knowing the features, robot can estimate his position (x, y, θ) in the field. Coordinates (x, y) obtained from the triangulation method, and θ obtained from the orientation sensors which planted in the robot. If it was equipped with a self-localization module, he could participate in global decision making for his team's best interest, such as game strategy, team coordination and role assignment among the players. This research discussed about features extraction for the ball, goal and field boundary. Goal identification is done by applying hough transform to detect lines that represent goalposts and crossbar. Polynomial curve fitting method used to get the distance between robot and the goal. To improve our robot performance, an orientation sensor was added. This sensor can be used to distinguish between oponent‟s side and our side. Then using non unique landmark and triangulation method, we do localization for soccer robot. As result, based on experiment robot can do localization with 0.1154m error.
Keywords: feature, localization, triangulation. I. PENDAHULUAN
Kontes robot sepak bola tingkat internasional atau disebut sebagai Robocup, selalu memberikan tantangan terhadap kontestan robot tersebut. Dengan adanya banyak tantangan,peneliti menciptakan berbagai algoritma dalam penentuan lokasi robot pada
lapangan. Penentuan lokasi robot terhadap sebuah atau beberapa fitur secara umum telah dibahas pada [1]. Namun, secara khusus beberapa peneliti sudah membahas penentuan lokasi pada robot pemain sepak bola salah satunya dengan cara sederhana yaitu triangulasi secara individu untuk masing-masing robot [2], penentuan lokasi yang adaptif berdasarkan pandangan robot [3], ataupun dengan cara penentuan lokasi berdasarkan pandangan robot secara bersama-sama (kolaborasi antar robot) [4]. Setelah robot mampu menentukan lokasi dalam lapangan sepak bola, kemampuan tersebut kemudian dikembangkan agar robot dapat saling bekerja sama dalam melakukan penyerangan atau bertahan pada permainan sepak bola seperti pada [5].
II. PENELITIAN SEBELUMNYA
Penelitian mengenai penentuan posisi robot dilapangan pernah dilakukan pada [2]. Penelitian tersebut menggunakan metode triangulasi. Robot dapat menentukan posisinya dilapangan berdasarkan penanda pada lapangan standar robocup 2012. Dimana penanda yang ada tergolong unik. Perubahan dan peningkatan yang terjadi pada aturan robocup memicu para penelti untuk terus melakukan pembenahan sehingga dapat menyesuaikan diri dengan aturan-aturan baru. Sebagi contoh adalah peubahan warna gawang biru dan kuning menjadi berwana sama yaitu kuning.
169 | | Yogyakarta State University | Yogyakarta - Indonesia III. EKSTRAKSI FITUR
Pemilihan Fitur Warna Pada kondisi real, kondisi pencahayaan di lapangan tidak tetap dan tidak rata. Hal tersebut menjadi tantangan tersendiri untuk memilih representasi
colorspace terbaik untuk mengatasi variasi
dalam kondisi pencahayaan. Kamera robot menghasilkan citra RGB sebagai masukan. Namun, citra RGB colorspace tidak layak apabila langsung diproses untuk sebagian besar aplikasi karena pengaruh lingkungan seperti pencahayaan dan bayangan.
Gambar 1. HSV Colorspace [6]
HSV adalah solusi untuk masalah kondisi lingkungan yang tidak tetap. HSV merupakan representasi colorspace silinder, yang berisi informasi tentang hue, saturation, dan value. Hue mendefinisikan kromatisitas warna dan tidak tergantung pada kondisi pencahayaan. Pada Pada gambar 1 ilustrasi warna direpresentasikan dalam bentuk silinder. Dapat dilihat bahwa warna diwakili oleh dimensi sudut di sumbu vertikal silinder ini [6]. Deteksi Tepi Lapangan Pendeteksian tepi lapangan dilakukan untuk mempermudah proses pengenalan fitur-fitur yang berada di lapangan. Manfaat lainnya adalah menghilangkan noise di luar lapangan yang biasanya berwarna sama dengan fitur dalam lapangan.
Citra masukan yang di tangkap kamera berukuran 320x240 pixel. Untuk mempercepat proses pendeteksian tepi lapangan, maka citra tersebut di bagi dalam grid 80x60. Kemudian dibuat citra baru dengan ukuran grid tersebut yang mana 1 pixel pada citra baru mewakili kemunculan warna 4x4 citra asli. Hal tersebut
mengurangi resolusi citra yang akan diolah, sehingga memungkinkan akses yang cepat pada kepadatan warna yang sesuai di area citra [7].
Langkah selanjutnya yaitu dengan deteksi blob menggunakan segmentasi citra berdasarkan warna hijau lapangan pada ruang warna HSV. Selanjutnya dilakukan closing untuk menutupi celah-celah citra biner yang di dapat dari hasil segmentasi. Celah tersebut berasal dari garis lapangan, bola ataupun robot lawan. Matrix untuk closing di dapat berdasarkan beberapa percobaan sehingga di peroleh ukuran matriks yang sesuai. Hasil akhir segmentasi terlihat pada gambar 2.
(a) (b) (c) Gambar 2. Proses segmentasi, (a) citra asli (b)
segmenasi awal (c) setelah dilakukan closing Selanjutnya adalah proses pengecekan piksel dari kiri ke atas pada masing-masing sumbu y dimulai dari bagian kiri citra biner. Dengan asumsi biner 1 untuk warna hijau dan biner 0 untuk selain hijau, apabila saat pengecekan di dapat nilai biner 0 lebih dari tiga pixel maka pixel terakhir mendapat mendapat biner 1 adalah titik tepinya. Langkah ini berulang sampai dengan sisi terkanan citra. Titik tersebut di simpan dalam bentuk vektor. Langkah terakhir adalah penskalaan balik untuk menentukan tepi lapangan pada citra asal. Sehingga didapat tepi lapangan seperti terlihat pada gambar 3.
170 | | Yogyakarta State University | Yogyakarta - Indonesia Gambar 3. Hasil Deteksi Garis Tepi Lapangan
Deteksi Bola Pendeteksian bola standar
robocup yang berwarna jingga biasanya
dilakukan dengan cara yang sederhana, yaitu menggunakan segmentasi warna. Sehingga di dapat blob yang nantinya dianggap sebagai bola. Namun dalam hal tersebut robot tidak dapat membedakan bola yang berada di lapangan dengan noise yang berada di luar lapangan seperti baju penonton atau bahkan lingkungan sekitar pertandingan.
Untuk dapat membedakan bola di dalam lapangan dan obyek lain diluar lapangan yang memiliki warna sama adalah dengan menganggap bola yang berada di bawah tepi lapangan. Sebelumnya telah di bahas mengenai pendeteksian tepi lapangan. Dari hasil tersebut warna jingga pada citra yang di anggap hanya yang berada di dalam lapangan saja dan mengabaikan warna jingga yang berada di atas tepi lapangan.
(a) (b)
Gambar 4. Deteksi bola: (a) Bola di dalam lapangan (b) Bola diluar lapangan
Hasil yang di peroleh dari dua metode tersebut tidak jauh berbeda. Robot dapat membedakan bola yang berada di dalam lapangan dan noise yang berada di luar lapangan. Hasil pendeteksian bola tersebut terlihat pada gambar 6.
Deteksi Gawang Gambar 5 menunjukkan urutan proses deteksi gawang. Langkah pertama dalam pendeteksian gawang adalah deteksi blob dengan cara melakukan segmentasi warna kuning menggunakan kisaran data nilai HSV yang didapat dari proses kalibrasi. Namun, citra biner yang di dapat dari hasil segmentasi masih memiliki unsur noise. Untuk menghilangkan noise tersebut dilakukan proses morphological
filtering mnggunakan closing.
Gambar 5. Diagram alir pendeteksian gawang Selanjutnya dilakukan deteksi tepi dan kontur pada citra biner hasil segmentasi untuk mendapatkan kumpulan titik paling tepi dari blob tersebut. Titik-titik ini mempunyai informasi koordinat pada bidang citra ( ). Metode transformasi Hough [8] diterapkan pada citra biner hasil deteksi tepi, sehingga di dapat garis-garis yang membentuk tepi tersebut. Garis-garis tersebut selanjutnya akan dilakukan ekstraksi fitur untuk memperoleh mistar dan tiang gawang. Mistar gawang merupakan garis horisontal sedangkan tiang gawang adalah garis vertical. Sudut tiang gawang di dapat dari perpotongan kedua garis tersebut. Dan titik dasar tiang gawang didapat dengan melakukan pengecekan dari perpotongan garis tersebut sampai pada titik terbawah garis tiang gawang sampai tidak lagi ditemukan warna pixel putih. Tinggi tiang gawang di dapat dari perhitungan jarak titik potong dan titik dasar tiang gawang. Tinggi tiang selanjutnya akan di jadikan acuan untuk proses estimasi jarak robot terhadap gawang. Start Citra RGB Konversi Ke HSV Deteksi Blob Kuning Deteksi Tepi Pemrosesan Garis Penentuan titik-titik pentng Deteksi Garis 1 1 Stop Tinggi tiang
171 | | Yogyakarta State University | Yogyakarta - Indonesia (a) (b)
Gambar 6. Deteksi gawang dengan hanya sebagian gawang yang terlihat, (a) hasil deteksi
tiang kiri dan (b) hasil deteksi tiang kanan Apabila hanya terdeteksi separuh tiang, untuk membedakan tiang kiri dan kanan perludilakukan pengecekan warna pixel putih pada area garis vertikal mistar gawang. Apabila wana pixel putih di kiri perpotongan garis lebih dominan maka itu adalah tiang kanan, dan juga sebaliknya. Namun untuk membedakan tiang gawang sendiri dan gawang musuh dapat menggunakan sensor orientasi sebagai acuan. Hasil pendeteksian gawang dapat dilihat pada gambar 6.
IV. PENENTUAN POSISI ROBOT DI LAPANGAN
Penentuan posisi robot di lapangan dapat menjadi strategi dalam permainan sepak bola robot. Pada penelitian ini kami menggunakan metote triangulasi [2], dan digabungkan dengan sensor orientasi sebagai pembeda gawang sendiri dan gawang musuh. Sehingga untuk penentuan sudut robot sepenuhnya bergantung pada sensor tersebut.
Langkah pertama dalam penentuan posisi robot adalah memperoleh estimasi jarak robot dengan penanda. Estimasi jarak di peroleh dengan melakukan perbandingan antara tinggi tiang dan jarak robot sebenarnya dengan beberapa percobaan. Sehingga di peroleh persamaan berdasarkan metode curve fitting.
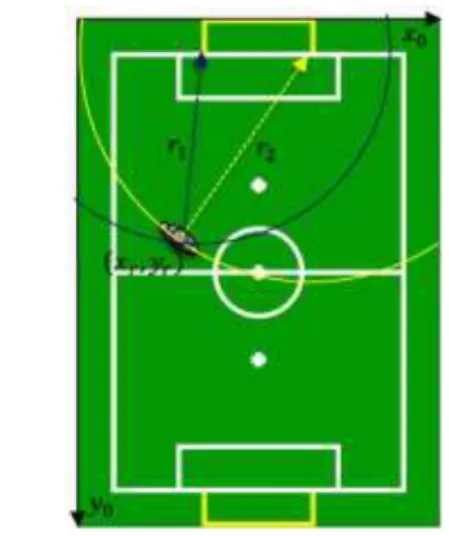
Ketika jarak antara robot dan minimal dua penanda (tiang kiri(xa, ya) dan tiang kanan(xb, yb)) di peroleh, maka posisi robot (xr, yr) dapat di peroleh dengan menentukan perpotongan dua lingkaran dengan jari-jari r1 dan r2 yang berpusat pada dua penanda yang di ketahui sebelumnya. Sebagai ilustrasi dapat di lihat pada gambar 7.
Gambar 7. Penetuan posisi robot dengan metode triangulasi
V. PERCOBAAN DAN HASIL
Percobaan penentuan posisi robot dilakukan pada robot sebenarnya menggunakan platform DARwIn-OP. Robot di tempatkan di posisi yang berbeda-beda untuk mengatahui akurasi penentuan posisi yang didapat. Table 1 menunjukkan perbandingan posisi robot sebenarnya dan hasil penentuan posisi robot menggunakan metode triangulasi dengan acuan penanda tidak unik berupa gawang.
Tabel 1. Hasil penentuan posisi
No Posisi robot Hasil galat
(jarak(m)) x y x y 1 3,50 2,60 3,60 2,63 0,1044 2 3,20 3,50 3,15 3,55 0,0707 3 2,50 4,00 2,66 4,07 0.1746 4 2,50 3,50 2,70 3,31 0,2759 5 2,50 2,90 2,65 2,90 0.1500 6 2,50 2,45 2,60 2,65 0.2236 7 1,40 2,50 1,63 2,66 0.2802 8 1,50 1,70 1,53 1,66 0.0949 Galat rata-rata : 0.1154 Dari pengujian delapan titik di dapat galat rata-rata sebesar 0.1154 meter. Berdasar percobaan yang dilakukan, tingkat akurasi posisi bergantung pada hasil estimasi jarak robot dengan penanda. Semakin mendekati kebenaran jarak yang didapat maka posisi yang diperoleh akan semakin akurat.
VI. K ESIMPULAN
Penelitian ini masih dalam tahap penyelesaian akhir berupa penentuan lokasi
172 | | Yogyakarta State University | Yogyakarta - Indonesia robot untuk seluruh bagian lapangan. Kami
sudah berhasil melakukan ektraksi fitur yang tidak unik pada lapangan untuk robot pemain sepak bola yang meliputi deteksi bola, deteksi tepi lapangan, dan deteksi gawang. Dari penelitian yang kami lakukan, kami memperoleh kesimpulan sebagai berikut: 1) Pendeteksian bola dapat dengan melakukan
pengecekan warna lapangan di sekitar bola atau hanya memproses warna bola yang berada di lapangan.
2) Gawang dapat diperoleh dengan melakuakan tranformasi hough garis sehingga di dapat perpotongan antara mistar dan tiang gawang yang menjadi acuan utama sebagai pengenalan gawang.
3) Hasil penentuan posisi menggunakan metode triangulasi cukup akurat. Dari pengujian 8 titik di peroleh galat rata-rata 0,1154 meter.
VII. PENELITIAN SELANJUTNYA
Kami akan melakukan penambahan pendeteksian penanda seperti garis lapangan. Pendeteksian garis lapangan dapat menggunakan [7]. Dengan penambahan penanda proses penentuan posisi robot akan lebih akurat karena akan lebih mudah memperoleh penanda sebagai acuan untuk penentuan posisi robot di lapangan. Selain itu perlu di lakukan optimasi terkait penelitian ini dan sebelum-sebelumnya.
VIII. UCAPAN TERIMAKASIH
Penulis menyampaikan terima kasih kepada Institut Teknologi Sepuluh Nopember yang telah memberikan pen-danaan dalam semua kegiatan Robotika di ITS termasuk salah satu bagiannya adalah publikasi Makalah ini. Penulis juga menyampaikan ucapan terima kasih kepada semua anggota tim Dosen Pembimbing robot di Institut Teknologi Sepuluh Nopember.
IX. Daftar Pustaka
[1] S. Thrun, Probabilistic robotics, ser.
Intelligent robotics and autonomous agents.
Cambridge, Mass: MIT Press, 2005.
[2] M. Andung Muntaha, Muhtadin, and M. Hery Purnomo, ―Self-localization for humanoid
soccer robots based on triangulation method,‖
in Indonesian Symposium On Robot Soccer Competition. Semarang: Dian Nuswantoro University, Jun.
[3] C. Hsien Hsia, J. Shiun Chiang, and S. Hung Chang, ―Adaptive vision-based self-localization
system for humanoid robot of RoboCup,‖ vol. 9
Number 3, Mar. 2013.
[4] C.-H. Chang, S.-C. Wang, and C.-C. Wang, ―Vision-based cooperative simultaneous localization and tracking.‖ IEEE International
Conference Robotics and Automation ICRA, May 2011, pp. 5191–5197. [Online]. Available: http://ieeexplore.ieee.org/lpdocs/epic03/wrappe r.htm?arnumber=5980505
[5] C. Y. Low, N. Aziz, M. Aldemir, M. Mellado, R. Du-mitrescu, and H. Anacker, ―Principle solution for designing collaborative
humanoid soccer robots,‖ Procedia
Engineering, vol. 41, pp. 1507–1515, Jan. 2012. [Online]. Available: http://linkinghub.elsevier .com/retrieve/pii/S1877705812027439
[6] G. Amogh, G. D. Patrick, K. M. Georgios, S. Nikolaas, ―Feature Detection and Localization for the RoboCup Soccer SPL,‖
University of Amsterdam. Feb. 2013.
[7] S. Hannes, L. Weichao, S. Jorg, B. Sven, ―Utilizing the Structure of Field Lines for
Efficient Soccer Robot Localization,‖ in
Proceedings of RoboCup International. Symposium. Singapore. Jun. 2010.
[8] A. Mercader Pallarés, D. Puig Valls, and T. González Sánchez, ―Goal detection for soccer-playing robots based on hough transform,‖ Departament dEnginyeria Informàtica i Matemàtiques, Universitat Rovira I Virgili,Tech. Rep., 6 2009.
![Gambar 1. HSV Colorspace [6]](https://thumb-ap.123doks.com/thumbv2/123dok/4157098.2833038/2.892.172.406.391.568/gambar-hsv-colorspace.webp)