METODE GRAVITASI A. PENDAHULUAN
Di antara sifat fisis batuan yang mampu membedakan antara satu macam batuan dengan batuan lainnya adalah massa jenis batuan. Distribusi massa jenis yang tidak homogen pada batuan penyusun kulit bumi akan memberikan variasi harga medan gravitasi di permukaan bumi. Metode medan gravitasi adalah metode penyelidikan dalam geofisika yang didasarkan pada variasi medan gravitasi di permukaan bumi.
Distribusi massa jenis yang tidak homogen ini dapat disebabkan oleh struktur geologi yang ada di bawah permukaan bumi. Walaupun kontribusi struktur geologi terhadap variasi harga medan gravitasi dipermukaan bumi sangat kecil dibandingkan dengan nilai absolutnya, tetapi dengan peralatan yang baik variasi medan gravitasi di permukaan bumi dapat terukur dari titik ke titik sehingga dapat dipetakan. Selanjutnya dari peta tersebut dapat dilakukan interpretasi bentuk atau struktur bawah permukaan.
Variasi harga medan gravitasi di permukaan bumi tidak hanya disebabkan oleh distribusi massa jenis yang tidak merata, tetapi juga oleh posisi titik amat dipermukaan bumi. Hal ini disebabkan oleh adanya bentuk bumi yang tidak bulat sempurna dan relief bumi yang beragam. Untuk itu diperlukan metode-metode tertentu untuk mereduksi pengaruh selain karena distrbusi massa jenis.
B. TEORI
1. Teori Medan Medan Gravitasi
Teori medan gravitasi didasarkan pada hukum Newton tentang medan gravitasi universal. Hukum medan gravitasi Newton ini menyatakan bahwa gaya tarik antara dua titik massa m1 dan m2 yang berjarak r (gambar 1) adalah
r r m m G F 13 2 12 (1)
dimana F12 adalah gaya yang dialami oleh benda m1 dan G adalah tetapan medan gravitasi.
Gambar 1. Gaya tarik menarik antara m1 dan m2 pada jarak r.
Gaya persatuan muatan pada sembarang titik berjarak r dari m1 didefinisikan sebagai kuat medan gravitasi m1. Bila m1 adalah massa bumi, maka kuat medan gravitasi bumi sering disebut dengan percepatan medan gravitasi bumi, yang dapat dirumuskan sebagai:
g G M
r r
3 (2)
Medan gravitasi merupakan medan konservatif, yang merupakan gradien dari suatu fungsi potensial skalar U r( ) , sebagaimana berikut:
F r( ) U r( ) (3) di mana U r( ) GM r/ adalah potensial medan gravitasi bumi.
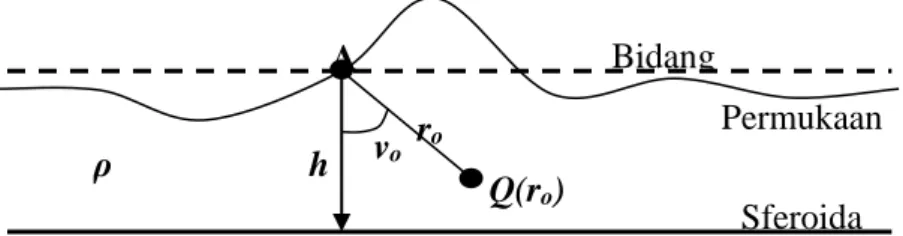
Potensial medan gravitasi yang disebabkan oleh distribusi massa kontinu (bukan merupakan titik massa) dapat dihitung dengan pengintegralan. Jika massa terdistribusi secara kontinu dengan densitas ( )r0 di dalam volume V, potensial medan gravitasi pada sembarang titik P di luar benda adalah
U r G r d r r r P V ( ) ( )
0 3 0 0 (4)Hubungan antara besar percepatan medan gravitasi dan potensial medan gravitasi adalah g UP . Percepatan medan gravitasi bumi bervariasi di permukaan bumi, dan
harganya bergantung pada (a) distribusi massa di bawah permukaan, sebagaimana ditunjukkan oleh fungsi densitas ( )r0 dan (b) bentuk bumi yang sebenarnya, sebagaimana ditunjukkan oleh batas integral.
2. Reduksi Data Gravitasi
Penelaahan tentang konsep reduksi data gravitasi lebih mudah dipahami dengan cara menelaah terlebihdahulu arti anomali medan gravitasi. Secara matematis dapat didefinisikan bahwa anomali medan gravitasi di topografi atau di posisi (x,y,z) merupakan selisih dari medan gravitasi observasi di topografi terhadap medan gravitasi teoritis di topografi. Medan gravitasi teoritis yaitu medan yang diakibatkan oleh faktor-faktor non-geologi dan harganya dihitung berdasarkan rumusan-rumusan yang dijabarkan secara teoritis. Nilai Medan ini dipengaruhi oleh letak lintang, ketinggian, dan massa topografi di sekitar titik tersebut. Secara matematis, Anomali medan gravitasi di topografi dapat dinyatakan dalam bentuk persamaan berikut :
g(x,y,z) = gobs (x,y,z) – gTeoritis (x,y,z) (5)
dengan g (x,y,z) merupakan anomali medan gravitasi di topografi, dan gobs(x,y,z) adalah medan gravitasi observasi di topografi yang sudah dikoreksikan terhadap koreksi pasang-surut, koreksi tinggi alat dan koreksi drift. SedangkangTeoritis(x,y,z) merupakan medan gravitasi teoritis di topografi.
Medan gravitasi teoritis yang ditentukan lebih awal adalah medan gravitasi normal yang terletak pada bidang datum (pada ketinggian z = 0) sebagai titik referensi geodesi. Rumusan medan gravitasi normal pada bidang datum ini telah ditetapkan oleh The
International Association of geodesy (IAG) yang diberi nama Geodetic Reference System
1980 (GRS80) sebagai fungsi lintang (Joenil Kahar, 1990) yaitu :
g() = 978032,700 (1 + 0,0053024 sin2 - 0,0000058 sin22) (mgal) (6) dengan adalah garis lintang.
Dari persamaan (6) terlihat bahwa semakin tinggi letak lintangnya maka semakin besar percepatan gravitasinya. Jadi medan gravitasi bumi cenderung bertambah besar ke arah kutub.
2.1. Reduksi Free Air (Udara Bebas)
Jika persamaan (6) sebagai medan gravitasi teoritis disubtitusikan ke persamaan (5) maka anomali medan gravitasi di topografi yang dihasilkannya belum dapat didefinisikan secara fisis. Hal ini disebabkan karena medan gravitasi nomal, g(), masih berada pada bidang datum (z = 0) sedangkan medan gravitasi observasinya, gobs (x,y,z), berada pada topografi. Untuk mengatasi masalah ini, diperlukan suatu teknik untuk membawa medan gravitasi normal yang berada pada bidang datum itu ke permukaan topografi, sehingga medan gravitasi normal dan medan gravitasi observasi sama-sama berada pada topografi. Teknik yang digunakan untuk mengatasinya yaitu dengan melakukan koreksi udara-bebas (free-air
correction) yang rumusan matematisnya adalah :
gf.a. - 0,308765 h miligal/m (7)
dengan h merupakan ketinggian stasiun dari datum. Persamaan (7) di atas disebut sebagai koreksi udara-bebas karena hanya memperhitungkan elevasi antara permukaan topografi (titik-titik observasi) dengan reference spheroid dengan mengabaikan massa diantaranya.
Dengan melibatkan reduksi free air sebagaimana di atas, maka g teoritis di permukaan topografi dapat dituliskan sebagai :
gTeoritis (x,y,z) = g() + gf.a (8)
Dengan koreksi udara-bebas ini maka diperoleh anomali medan gravitasi udara-bebas di topografi yang diformulasikan dalam persamaan berikut
g(x,y,z)f.a. = gobs (x,y,z) – gTeoritis (x,y,z) (9)
Pada penghitungan anomali medan gravitasi udara-bebas di atas, massa yang terletak antara datum dan permukaan topografi tidak diperhitungkan, padahal massa ini sangat mempengaruhi harga anomali medan gravitasi. Maka persamaan (9) akan lebih sempurna jika massa ini turut diperhitungkan. Grand and West, 1965, mendefinisikan bahwa massa yang terletak antara permukaan topografi dan bidang datum dapat dibagi menjadi dua bagian, yaitu :
a) Bagian massa yang terletak antara bidang Bouguer dengan bidang datum dimana efek dari massa ini disebut efek Bouguer. Anomali yang dihasilkan setelah dilakukan koreksi Bouguer terhadap anomali udara-bebas disebut anomali medan gravitasi Bouguer
sederhana.
b) Bagian massa yang berada di atas bidang Bouguer dan bagian massa yang hilang di bawah bidang Bouguer. Efek dari massa ini disebut efek medan (terrain effect). Anomali yang dihasilkan setelah dilakukan koreksi medan terhadap anomali Bouguer sederhana disebut
anomali medan gravitasi Bouguer lengkap.
Secara matematis, anomali medan gravitasi Bouguer sederhana di topogra-fi,gB.L.(x,y,z), dinyatakan oleh persamaan berikut :
) , , ( . . x y z gBS
Sedangkan anomali medan gravitasi Bouguer lengkap di topografi adalah : ) , , ( . . x y z gBL
= gobs (x,y,z) – gTeoritis (x,y,z) . + gB - gT] (11)
dengan gB merupakan koreksi Bouguer dan gT adalah koreksi medan (terrain correction). Anomali medan gravitasi Bouguer lengkap merefleksikan adanya variasi-variasi densitas dalam kerak.
Dengan dilakukannya koreksi Bouger tidak menghilangkan anomali massa yang terdapat di atas datum karena densitas massa yang digunakan dalam perhitungan koreksi Bouguer adalah densitas rata-rata dengan menganggap massa topografi bersifat homogen. Seperti halnya koreksi udara-bebas, dengan dilakukan koreksi Bouguer tidak berarti secara fisis memindahkan titik-titik observasi ke reference spheroid, dan tidak pula menimbulkan diskontinyuitas densitas dari massa-massa yang berada di atas dan di bawah reference
spheroid.
2.2.Berbagai Model Koreksi Bouguer
Model pendekatan terhadap koreksi Bouguer telah mengalami perkembangan dan pembaharuan. Model yang pertama dikenal adalah model slab horizontal tak hingga dengan ketebalan h relatif dari datum ke titik amat (stasiun). Besarnya koreksi Bouguer untuk model
slab horizontal tak hingga adalah
gB = 2 Gh (12)
dengan adalah densitas massa Bouguer (massa topografi) dan h adalah ketinggian stasiun dari datum. Jika daerah penelitianya sangat luas, dari model ini akan terdapat banyak massa kosong yang turut menyumbang dalam penghitungan koreksi Bouguer. Di samping itu, secara geometris model ini kurang dapat dipertanggungjawab-kan karena bentuk permukaan bumi tidak datar. Meskipun demikian, untuk daerah penelitian yang sempit (tidak luas) dan undulasinya kecil model ini masih signifikan digunakan karena makin sempit daerahnya maka secara geometris makin rendah derajat kelengkungannya atau makin mendekati bentuk datar. Hal ini dapat dilihat dari persamaan (15).
Gambar 2. Koreksi Bouguer model slab horizontal tak hingga
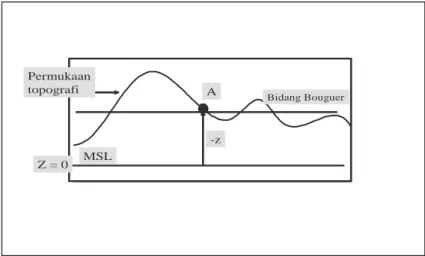
A MSL Bidang Bouguer -z Permukaan topografi Z = 0
. h
R1
R2
Model Cangkang Bola
(Karl,1971)
. R0 R h A 167 km Bullard cap 0Model topi sferis La Fehr
)
(
2
2
Gh
G
h
R
g
B
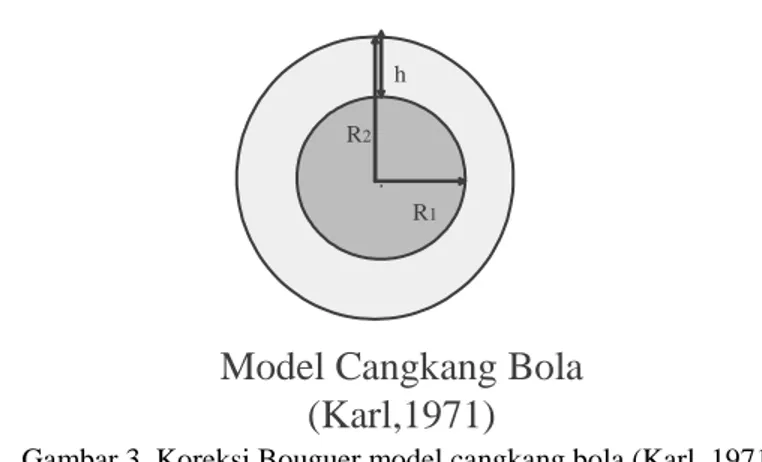
Model lain dari koreksi Bouguer adalah model cangkang bola (spherical shell) yang diajukan oleh Karl (1971). Karl menganggap bahwa bagian massa Bouguer berbentuk cangkang bola dengan ketebalan h dari datum. Besar koreksi Bouguer untuk model ini adalah
gB 4 Gh (13)
Dari persamaan (13) terlihat bahwa model cangkang bola tidak merubah bentuk efek Bouguer model slab horizontal tak hingga (masih linear terhadap dan h) dan hanya memperbesar menjadi 2 kali. Meskipun mendekati geometri permukaan bumi dan cukup mereduksi massa kosong yang diperhitungkan dalam model slab horizontal tak hingga, tetapi model cangkang bola ini tidak memberikan batasan radius permukaan guna meminimalkan perbedaan antara efek yang diperoleh dari model cangkang bola dengan efek dari model slab horizontal tak hingga.
Gambar 3. Koreksi Bouguer model cangkang bola (Karl, 1971)
Model koreksi Bouguer yang lebih eksak diusulkan oleh La Fehr (1990) dengan memodifikasi slab horizontal tak hingga ke suatu topi sferis dengan radius permukaan 166,735 km. Maksud dari pemilihan radius permukaan ini adalah untuk meminimalkan perbedaan antar efek yang diperoleh dari model topi sferis dengan efek yang diperoleh dari model slab horizontal tak hingga yang tidak diperhitungkan oleh Karl. Koreksi Bouguer model topi sferis La Fehr dinyatakan dalam formula berikut :
gB = 2 Gh + 2 G (h - R ) (14)
dengan dan merupakan koefisien-koefisien tanpa dimensi dan R adalah radius bumi sampai di stasiun. Suku kedua di ruas kanan persamaan (14) didefinisikan sebagai koreksi kelengkungan. Koreksi kelengkungan ini memodifikasi harga slab horizontal tak hingga ke suatu topi sferis yang mempunyai radius permukaan sebesar 166,735 km dan ketebalannya sama dengan ketebalan slab horizontal tak hingga.
Slab horizontal tak hingga
0
Model koreksi Bouguer Whitman(1991)
h
R
Ro
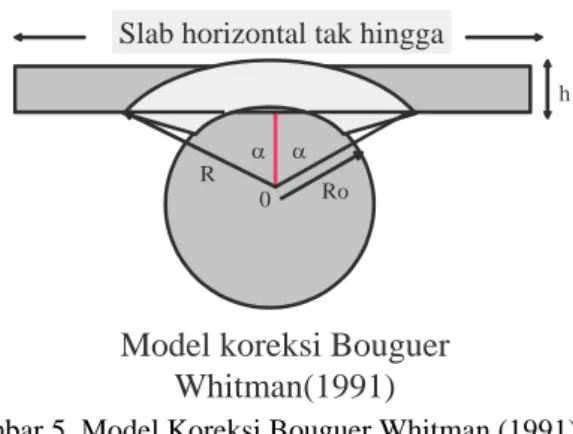
La Fehr tidak memberikan interpretasi fisis terhadap koreksi kelengkungan yang diusulkannya. Interpretasi fisis terhadap koreksi kelengkungan La Fehr justeru diberikan oleh Whitman (1991) yang mengusulkan bentuk koreksi Bouguer sebagai berikut :
1 2 1 2 2 2 Gh Gh H gB (15)
dengan H adalah rasio h terhadap R (dengan R = Ro + h dan Ro adalah radius bumi normal sampai datum) dan merupakan sudut dari pusat bumi. Suku kedua persamaan (15) merupakan koreksi kelengkungan Whitman.
Pada persamaan di atas, suku 2
menunjukkan gaya gravitasi vertikal akibat
kelengkungan bumi dengan sudut kelengkungan , suku
2
H
menunjukkan efek pemotongan slab flat pada radius permukaan Bullardnya (sRO), sedangkan suku H menunjukkan berkurangnya kelengkungan bumi dengan bertambahnya radius permukaan bumi R (dengan R ROh) atau dengan bertambahnya ketebalan slab h.
Gambar 5. Model Koreksi Bouguer Whitman (1991)
Pendekatan-pendekatan tehadap koreksi kelengkungan (Bullard B correction) dalam bentuk deret pangkat ketebalan h ( h dalam meter) diajukan oleh USGS dan oleh La Fehr sebagai berikut : USGS: 3 6 2 10 6 10 5 , 4 10 533 , 3 10 464 , 1 h h h BB milligal (16) La Fehr: 3 6 2 10 6 10 1 , 5 10 552725 , 3 10 46306 , 1 h h h BB milligal (17)
Dari beberapa model koreksi Bouguer di atas, model slab horizontal tak hingga merupakan model yang digunakan dalam penelitian ini. Alasan pemilihan model ini adalah disamping praktis penerapannya, juga karena daerah penelitiannya tidak luas dan undulasinya kecil sehingga penggunaan model ini masih signifikan.
2.3. Koreksi Medan
Seperti telah dijelaskan sebelumnya bahwa terdapat bagian massa yang berada di atas bidang Bouguer dan bagian massa yang hilang di bawah bidang Bouguer yang pada kenyataannya merepresentasikan keberadaan bukit dan lembah. Efek dari massa ini disebut efek medan (terrain effect). Adanya lembah akan mengurangi nilai medan gravitasi di titik pengamatan, demikian pula dengan adanya bukit mengakibatkan berkurangnya medan gravitasi di titik pengamatan. Massa bukit mengakibatkan terdapatnya komponen gaya ke atas yang berlawanan arah dengan komponen gaya gravitasi. Jadi adanya lembah dan bukit di sekitar titik pengamatan akan mengurangi besarnya medan gravitasi sebenarnya di titik tersebut, sehingga koreksi medan yang diperhitungkan selalu berharga positif. Pada penelitian ini penghitungan koreksi medan menggunakan metode yang diusulkan oleh Kane (1962). Metode ini didesain untuk menyeleksi data ketinggian disekitar stasiun gravitasi dimana koreksi medan akan dicari. Pada model ini dibuat grid dengan stasiun gravitasi sebagai pusatnya dan daerah perhitungan dibagi atas dua zona yaitu zona eksternal dan zona internal. Dengan menggunakan metode tersebut akan lebih efisien dalam perhitubgan koreksi medan. Program komputasi dari model ini telah dibuat oleh Ballina (1990) dengan menggunakan bahasa Fortran.
2.4. Penentuan Densitas Batuan
Pada koreksi topografi di atas (koreksi Bouguer dan koreksi medan) ada satu nilai yang belum diketahui yaitu densitas batuan permukaan (densitas topografi). Densitas batuan dipengaruhi oleh beberapa faktor diantaranya adalah rapat massa butir pembentuknya, porositas, kandungan fluida yang mengisi pori-porinya, serta pemadatan akibat tekanan dan pelapukan yang dialami batuan tersebut.
Metode penentuan densitas lapisan permukaan kerak bumi dari data hasil pengukuran gravitasi dapat dibagi atas dua bagian, yaitu :
a) Metode yang memanfaatkan data pengukuran gravitasi di permukaan.
b) Metode yang memanfaatkan data pengukuran gravitasi di bawah permukaan pada pertambangan dan boreholes.
Penentuan densitas dengan memanfaatkan data-data hasil pengukuran di permukaan dapat dilakukan dengan menggunakan metode Nettleton yang dapat ditempuh dengan dua cara, yaitu :
a) Secara grafis yaitu dengan membuat profil topografi dan profil anomali Bouguer untuk densitas yang berbeda-beda dari tiap-tiap lintasan yang dipilih. Harga densitas yang dipilih sebagai densitas batuan permukaan (atau densitas topografi) adalah densitas yang profil anomali Bouguernya berkorelasi minimum terhadap profil topografi.
b) Secara analitik yaitu dengan menggunakan persamaan matematis untuk menghitung koefisien korelasi dari semua data pengukuran gravitasi. Cara ini sangat baik karena memasukkan semua data pengukuran gravitasi sehingga menjadi kros korelasi dua dimensi. Persamaan analitik yang dipakai menghitung koefisien korelasi k adalah :
n k n k k i i k n k k i i k h h g g h h g g k 1 1 2 1 ) ( ) ( ) ( ) ( (18)dengan g() adalah anomali medan gravitasi Bouguer sederhana yang diformulasikan oleh persamaan (10). Jika k = 0 maka harga-harga anomali Bouguer dan harga-harga
elevasi tidak terkorelasi, yang berarti bahwa densitas yang diasumsikan merupakan harga densitas massa topografi yang tepat.
Guna memperkuat keyakinan terhadap hasil perhitungan densitas dengan menggunakan metoda di atas diperlukan pula informasi geologi tentang struktur batuan daerah survei.
C. Akuisisi
Sebelum dilakukan pengambilan data di lapangan, terlebih dahulu dilakukan survei awal untuk mempelajari sebaran titik amat yang akan diukur. Kemudian dilakukan desain survei untuk menentukan luas daerah survei dan spasi antar titik amat yang akan digunakan. Dalam pengambilan data di lapangan, hal yang pertama dilakukan adalah pembuatan titik ikat baik gravitasi maupun posisi. Pengumpulan data meliputi data gravitasi dan data posisi yang dilakukan secara bersamaan. Penentuan titik amat memperhatikan beberapa hal, antara lain; letak titik amat harus jelas dan mudah dikenali, lokasinya relatif terbuka untuk memudahkan pengukuran GPS, titik amat harus bisa dilihat dalam peta, relatif jauh dari gangguan (seperti getaran-getaran mesin, kendaraan berat) dan titik amat diusahakan pada daerah yang tanahnya stabil.
1. Luas Daerah Survey
Luas daerah survei disesuaikan dengan target yang diinginkan. Bila target anomali berukuran local (cukup kecil), maka daerah survey tidak perlu terlalu luas, diperkirakan sekitar 5 x 5 km2 dengan spasi titik amat yang cukup rapat (sekitar 200 meter). Bila target merupakan struktur geologi yang cukup besar, maka daerah pengamatan dapat diperluas menjadi sekitar 10 x 10 km2 s/d 20 x 20 km2 atau lebih luas lagi. Pengamatan pada lokasi yang diperkirakan merupakan lokasi anomali dibuat lebih rapat. Peta lapangan yang digunakan disesuaikan dengan luas daerah pengamatan, namun hendaknya tidak lebih kecil dari 1 : 25000.
2. Peralatan Yang Dipergunakan
Peralatan yang digunakan dalam survey adalah :
a. Gravitymeter La Coste & Romberg Model G-1118 MVR Feedback System yang mempunyai ketelitian 0.005 mgal.
b. GPS, 2 buah Trimbel Navigation 4600 LS Geodetic System Surveyor Single Frequence dan perlengkapannya.
c. Alat-alat bantu berupa penunjuk waktu (jam tangan), kompas, pelindung peralatan (payung) dan Handy Talky.
3. Penentuan Lokasi Pengukuran
Hal-hal yang perlu diperhatikan dalam penentuan lokasi pengukuran adalah penyediaan peta topografi dan peta geologi. Untuk keperluan orientasi medan digunakan peta topografi skala terkecil yang tersedia.
Setelah tersedia peta yang sesuai kemudian ditentukan lintasan pengukuran dan base
stasiun yang harga percepatan gravitasinya diketahui (diikatkan dengan titik yang telah
diketahui percepatan gravitasinya). Penentuan lintasan, titk ikat dan base stasiun diusahakan sedemikianrupa sehingga pelaksanaan pengukuran efektif dan memenuhi sasaran.
Pengambilan data posisi dan titik pengukuran medan gravitasi dilakukan secara bersama-sama. Beberapa hal yang perlu diperhatikan dalam menentukan titik pengukuran yaitu :
Letak titik pengukuran harus jelas dan mudah dikenal, sehingga apabila dikemudian hari dilakukan pengukuran ulang akan mudah untuk mendapatkannya.
Lokasi titik pengukuran harus dapat dibaca dalam peta.
Lokasi titik pengukuran harus bersifat permanen dan mudah dijangkau oleh peneliti, serta bebas dari gangguan kendaraan bermotor, mesin dan lain-lain.
Lokasi titik pengukuran harus terbuka sehingga GPS mampu menerima sinyal dari satelit dengan baik tanpa ada penghalang. Pada umumnya ruang pandang langit yang bebas ke segala arah di atas elevasi adalah 100 atau 150. Disamping itu titik pengukuran diusahakan jauh dari obyek-obyek reflektif yang mudah memantulkan sinyal GPS, untuk meminimalkan atau mencegah terjadinya multipath.
d. Pembuatan Base Station (Titik Ikat) Pengukuran Medan Gravitasi
Pada prinsipnya gravitymeter LaCoste&Romberg mengukur variasi percepatan gravitasi dari satu titik ke titik yang lain dan tidak mengukur percepatan gravitasi mutlak di suatu titik. Oleh karena itu untuk melakukan serangkaian pengukuran di lapangan diperlukan satu atau beberapa titik ikat yang sudah diketahui harga percepatan gravitasinya secara mutlak, yang disebut sebagai Base Station.
Besarnya harga medan gravitasi pada suatu base stasiun (titik ikat) pengukuran adalah
) ( relbs relref ref bs g g g g (1) dengan : bs
g = harga medan gravitasi Base Station (titik ikat)
ref
g = harga medan gravitasi di titik referensi
relikk
g = harga pembacaan gravitasi di titik ikat
relref
g = harga pembacaan gravitasi di titik referensi
5. Format Data Lapangan
Data yang diperoleh dari lapangan hendaknya dicatat didalam buku lapangan, tidak dalam lembaran kertas yang mudah hilang. Format data disesuaikan dengan data yang diamati, yaitu memuat semua data yang perlu dicatat. Data tersebut antara lain :
a. Hari dan tanggal pengamatan, cuaca, operator, dll.
b. Nama stasiun (titik amat), misalkan L01-01, dimana L menyatakan lintasan, 01 adalah nomor lintasan dan 01 berikutnya adalah nomor titik amat.
c. Pembacaan skala gravitymeter. d. Pembacaan feedback.
e. Tinggi alat ukur terhadap titik amat.
f. Besar pasang surut teoritis (berupa tabel yang telah disiapkan lebih dulu).
g. Data lainnya berupa keterangan saat pengamatan atau dapat diisi dengan session pengukuran GPS pada titik tersebut.
Pengamatan tersebut dapat dibuat tabel dalam bentuk contoh sebagai berikut :
INSTRUMENTASI
Petunjuk Praktis Pemakaian Gravitymeter LaCoste & Romberg
I. Pendahuluan
Kebutuhan dan harapan pada suatu kegiatan pengukuran di lapangan ialah dapat diperolehnya data yang tepat, benar dan akurat, karena data sangat mempengaruhi hasil akhir yang didapat. Untuk mengoperasikan gravitymeter dengan baik diperlukan seorang operator yang cermat, terutama dalam hal pengaturan dan pengamatan untuk memperoleh data medan gravitasi yang akurat, baik di lapangan maupun di laboratorium. Pengetahuan yang baik tentang alat yang digunakan sangat membantu memperoleh prosedur yang benar dalam memperoleh data yang akurat.
Gravitymeter LaCoste & Romberg terdiri dari dua model, yaitu model G dan model D. Model G mempunyai jangkauan skala yang lebar (sekitar 7000 skala, setara dengan 7000 mgal), sehingga dalam pengoperasiannya tidak perlu diset ulang. Model D mempunyai ketelitian satu orde lebih tinggi dari model G, tetapi jangkau skala hanya sekitar 200 mgal. Ini berarti bila digunakan untuk pengukuran yang mempunyai variasi medan gravitasi lebih dari 200 mgal, gravitymeter perlu diset ulang pada salah satu titik amat di lapangan. Dalam bagian berikutnya hanya dibahas untuk gravitymeter LaCoste & Romberg model G.
Setiap gravitymeter LaCoste & Romberg dalam pengukurannya menggunakan sistem pengukuran secara relatif. Data yang terbaca dari gravitymeter tidak langsung dalam satuan mgal, tetapi dalam satuan skala pembacaan, yang dapat dikonversi ke satuan mgal dengan menggunakan tabel kalibrasi. Sistem pengungkit (lever) dan sekrup (screw) pada gravitymeter ini dikalibrasi secara teliti pada semua jangkauan pembacaan. Faktor kalibrasi (yaitu tabel kalibrasi) hanya bergantung pada sistem pengungkit dan sekrup pengukur, tidak pada pegas lemah sebagaimana pada alat yang lain. Dengan alasan ini, faktor kalibrasi pada gravitymeter LaCoste & Romberg tidak berubah terhadap waktu secara jelas. Untuk mengeliminasi perubahan, pengecekan terhadap faktor kalibrasi dapat dilakukan secara berkala.
II. Menjalankan Gravitymeter
II.1. Posisi Pengamat terhadap Gravitymeter
Untuk mendapatkan harga pembacaan yang teliti dan cepat, di samping kondisi gravitymeter yang baik, peranan pengamat dalam melakukan pengamatan amat besar. Untuk itu sangat dianjurkan :
No Nama Sta. Skala pemb. Feed-back Tinggi alat Pasang surut Ket.
Letakkan piringan pada titik amat yang ditentukan. Apabila titik amat tidak mungkin ditempati piringan (tanah labil, miring, banyak akar pohon, dll), disarankan titik amat dipindah, atau letakkan piringan di tempat yang memungkinkan sedekat mungkin dengan titik amat.
Letakkan kotak pembawa gravitymeter di depan titik amat.
Usahakan berdiri menghadap alat dengan membelakangi matahari, dengan harapan sinar matahari tidak mengenai gravitymeter. Apabila tidak memungkinkan, gunakan payung untuk melindungi gravitymeter. Demikian pula pada waktu hujan, dianjurkan untuk berhenti mengukur. Bila tetap harus dilanjutkan, lindungi gravitymeter dari air.
Perhatikan arah angin (terutama bila bertiup kencang) agar tidak mengganggu pergerakan benang bacaan.
Hindarkan alat-alat berat (kunci, koin, kacamata dalam saku, dsb.) berada di dekat gravitymeter pada saat mengukur. Dengan demikian gravitymeter terhindar dari kemungkinan kejatuhan barang-barang tersebut.
Ambillah sikap serelaks mungkin (disarankan dengan cara berlutut) pada saat mulai pengamatan. Jangan membuat banyak gerakan pada saat melakukan pengamatan.
Sediakan bantalan bila daerah pengamatan berada pada arean yang berbatu dan berkerikil.
II.2. Menegakkan Gravitymeter
Teknik menegakkan gravitymeter dilakukan dengan cara mengatur level memanjang dan melintang. Bila terdapat 2 tipe level (yaitu air dan elektronik), gunakan level elektronik. Lakukan langkah-langkah berikut untuk membantu menegakkan gravitymeter secara sempurna dalam waktu singkat.
Letakkan piringan dan tekan sisi-sisinya pada permukaan tanah sehingga ketiga kakinya tertanam pada tanah secara mantap. Lakukan ini dengan mengusahakan gelembung nivo pada piringan berada di tengah.
Jika pengamatan dilakukan pada tanah yang lunak, letakkan sekeping papan, atau sesuatu yang lain sebagai landasan di antara piringan dan permuakaan tanah. Letakkan piringan di atas papan tersebut sehingga mendapat kedudukan yang mantap. Tanpa alas papan (atau lainnya)
Buka penutup kotak pembawa dan periksa temperatur gravitymeter. Untuk LaCoste & Romberg G-1118, temperatur minimumnya adalah 55.70 C. Kabel penghubung batteray sebaiknya dalam keadaan bebas.
Kelurakan gravitymeter dengan cara mengangkat pada bagian sekerup penegak dengan menggunakan ibujari dan jari lainnya menekan badan gravitymeter. Letakkan gravitymeter di atas piringan secara hati-hati. Hindarkan gravitymeter goncangan dan benturan keras dengan.
Geser gravitymeter untuk mendapatkan perkiraan posisi tegak dengan cara sedikit mengangkatnya. Lakukan dengan kedua telapak tangan dan ibu jari menempel pada bagian kiri dan kanan badan gravitymeter, sedang jari lainnya menyangga pada bagian bawah gravitymeter. Bila level (elektronik atau gelembung) telah mendekati posisi tengah (seimbang), hentikan pergeseran tersebut.
Nyalakan lampu gravitymeter.
Gunakan sekerup penegak untuk mendapatkan posisi tegak sempurna. Pengaturan level ini dengan menggunakan sekerup-sekerup penegak yang berjumlah 3 buah. Usahakan menggunakan hanya 2 buah saja, yaitu salah satu sekerup memanjang dan satu sekerup melintang.
II.3. Pembacaan gravitymeter.
II.3.1. Tanpa MVR Feedback
Setelah gravitymeter dalam posisi tegak sempurna, pembacaan gravitymeter dapat dilakukan dengan langkah-langkah sebagai berikut :
Putar sekerup pengunci (clamp) berlawanan jarum jam sampai habis.
Amati posisi benang bacaan pada lensa pengamatan. Perhatikan posisinya setelah berhenti bergerak, apakah terletak di sebelah kiri atau kanan garis baca (reading line, untuk LaCoste & Roimberg G-1118 adalah 2.70).
Amati dan gerakkan benang bacaan dengan memutar sekerup pembacaan secara pelahan searah atau berlawanan jarum jam. Bila benang bacaan terletak di sebelah kiri putar sekerup pembacaan searah jarum jam dan sebaliknya. Hentikan putaran saat benang bacaan berimpit dengan garis baca.
Untuk mendapatkan harga pembacaan yang baik, putaran sekerup pembacaan disarankan dari arah kiri ke kanan (searah jarum jam). Langkah ini dapat langsung dilaksanakan bila benang bacaan terletak di sebelah kiri garis baca. Bila benang bacaan terletak di sebelah kanan garis baca, putar sekerup pembacaan berlawanan jarum jam hingga benang bacaan bergeser ke sebelah kiri garis baca. Baru kemudian lakukan putaran balik (searah jarum jam) sampai benang bacaan berimpit dengan garis baca. Hal ini dilakukan untuk menghindari pembacaan semu (backlash) akibat putaran sekerup pembacaan yang tidak seragam.
Catatan :
Posisi garis baca yang benar adalah keadaan dimana batas bawah (bagian kiri) dari benang bacaan berimpit dengan garis baca (lihat gambar pada buku manual Gravitymeter LaCoste & Romberg).
Periksa level memanjang dan melintang, bila level berubah lakukan pembetulan level untuk mendapatkan posisi tegak sempurna. Periksa kembali posisi benang bacaan, apakah masih berimpit dengan garis baca atau berubah. Bila berubah putar sekerup pembacaan lagi sampai mendapatkan posisi benang pembacaan yang benar (Ingat aturan putaran dari kiri ke kanan).
Matikan lampu gravitymeter secara pelahan, jangan membuat gerakan yang mengejut. Putar sekerup pengunci searah jam sampai habis untuk mengunci pegas.
Baca hasil pengukuran pada skala pembacaan. Catatan :
Jangan lupa untuk selalu melakukan pengecekan terhadap battery dan suhu alat, yaitu dengan memutar switch MVR Internal Feedback ke pilihan A untuk battery dan B untuk suhu. Bila battery sudah mendekati angka 10, segera ganti dengan battery yang penuh. Untuk praktisnya, lakukan penggantian battery tiap 6 atau 7 jam selama pengukuran di lapangan.
Ingat pengukuran medan gravitasi merupakan pengukuran relatrif dan hasil bacaan masih dalam satuan skala baca. Untuk mendapatkan harga dalam mgal perlu dikonversi dengan menggunakan tabel kalibrasi.
Hasil pembacaan merupakan hasil dari pengamatan pada titik amat tersebut. Untuk tiap titik amat dilakukan prosedur yang sama. Langkah-langkah ini merupakan prosedur bila pengamatan dilakukan tidak dengan menggunakan MVR feedback. Prosedur pengamatan dengan menggunakan MVR feedback agak sedikit lain.
II.3.2. Dengan menggunakan MVR Feedback
Hidupkan MVR feedback dengan memindahkan switchnya ke pilihan yang ditentukan (30 V atau 10 V). Lihat keterangannya pada bagian MVR feedback.
Pada titik amat yang ditentukan lakukan langkah 1 s/d 6 sebagaimana bila tanpa MVR feedback
Amati besar pembacaan feedback pada DVM (Digital Volt Meter), pada bagian yang bertuliskan MVR Internal Feedback, dengan memindah switchnya ke pilihan D (bila digunakan 10 V) atau E (bila 30 V). Pembacaan feedback dilakukan setelah angka tidak menunjukkan perubahan (sudah konstan atau stabil) atau paling tidak sudah lambat perubahannya. Usahakan pembacaan feedback mendekati angka nol, kecuali digunakan prosedur pengukuran di lapangan dengan memanfaatkan feedback tanpa mengubah skala pembacaan.
Lakukan langkah 7 dan 8 sebagaimana pembacaan dengan tanpa feedback.
III. Processing
Dalam metode Gravitasi, pengolahan data dilakukan dengan tujuan untuk mencari perbedaan harga percepatan gravitasi dari satu titik ke titik yang lain di suatu tempat yang disebabkan oleh adanya massa batuan di kulit terluar bumi. Seperti diketahui bahwa massa tersebut hanya menyumbang sekitar 0,05% dari harga gravitasi yang didapat. Oleh karena itu, penyebab-penyebab gravitasi selain itu harus dihilangkan atau direduksi. Pengolahan data dimulai dari data mentah kemudian dilanjutkan dengan pengolahan data awal dan pengolahan data lanjutan.
Pengolahan data awal gravitasi dimulai dari data mentah, konversi ke harga miligal, koreksi tinggi alat, koreksi pasang surut serta koreksi drift.
a. Konversi ke Harga Miligal
Pembacaan pada gravitymeter masih berupa pembacaan skala, belum mempunyai satuan dan setiap model gravitymeter mempunyai tabel konversi yang berlainan tergantung spesifikasi model gravitymeternya.
Oleh karena itu untuk mengubah dari satuan skala menjadi satuan miligal maka harga pembacaan dari gravitymeter harus dikonversikan terlebih dahulu ke harga miligal dengan menggunakan tabel konversi.
Rumus Konversi ke harga miligal yaitu:
G F
kGS m( 0,001029411) (2)
dengan :
Gs = g bacaan dalam satuan miligal
Gm = g bacaan skala
F = pembacaan feedback dalam volt ` k = harga konversi skala ke miligal. b. Koreksi Tinggi Alat
Tinggi alat merupakan jarak antara permukaan atas gravitymeter dengan titik ukur posisi (GPS). Tujuan dilakukan koreksi tinggi alat adalah agar pembacaan gravitasi di setiap pengukuran mempunyai posisi ketinggian yang sama dengan pengukuran hasil data GPS. Koreksi tinggi alat ini mengurangi besar nilai g sehingga harus ditambahkan.
GSH = GS + 0,3086h (3)
dengan :
GSH = pembacaan gravitasi terkoreksi tinggi alat
GS = pembacaan gravitasi dalam miligal
c. Koreksi Pasang Surut
Data hasil pengukuran gravitasi dipengaruhi oleh gaya tarik menarik Bumi dengan benda-benda langit khususnya Matahari dan Bulan. Untuk menghilangkan pengaruh yang timbul tersebut, maka data hasil pengukuran perlu dilakukan koreksi terlebih dahulu. Koreksi untuk menghilangkan pengaruh gaya tarik menarik antara Bumi dengan Matahari dan bulan disebut koreksi pasang surut. Besarnya koreksi pasang surut ini dihitung dengan menggunakan program komputer berdasarkan perumusan Longman (1969) dalam bahasa FORTRAN. Koreksi pasang surut menambah besarnya nilai g sehingga harus dikurangkan.
GSHT = GSH - T (4)
dengan :
GSHT = pembacaan gravitasi terkoreksi tinggi alat dan pasang surut
GSH = pembacaan gravitasi dalam miligal terkoreksi Tinggi alat
T = koreksi pasang surut dalam miligal d. Koreksi Drift
Drift adalah pergeseran pembacaan titik nol yang disebabkan oleh adanya struktur dalam
dari gravitymeter yang berupa pegas yang sangat halus, sangat peka terhadap sejumlah penyimpangan ketika terjadi guncangan yang timbul sewaktu mengadakan pengukuran di lapangan, atau pada waktu mengangkutnya dari titik amat yang satu ke titik amat yang lainnya. Besarnya drift ini merupakan fungsi waktu. Koreksi drift dilakukan dengan cara
looping, yaitu dengan mengadakan pembacaan ulang pada stasiun pangkal (titik ikat)
dalam satu loop, sehingga dapat diketahui harga penyimpangannya. Selanjutnya dengan menganggap bahwa besarnya harga drift tersebut linier terhadap waktu maka harga penyimpangan tersebut dapat dikoreksikan terhadap titik amat lain dalam loop tersebut. Besarnya koreksi drift pada tiap-tiap titik amat dapat dirumuskan sebagai berikut :
0
" 0 0 " 0 0 1 1 S S S S S S S P P t t t t D (5) dengan :DS1 = koreksi drift pada titik amat S1
tS1 = waktu pembacaan pada titik amat S1
tS0 = waktu pembacaan pada titik amat S0
t”S0 = waktu pembacaan ulang (looping) pada titik amat S0
P”S1 = pembacaan gravitasi ulang (looping) pada titik amat S0
PS0 = pembacaan gravitasi pada titik amat S0
e. Harga Gravitasi Pengamatan (gobs)
Harga gravitasi observasi diperoleh dengan melakukan pengolahan awal yaitu konversi harga pembacaan dari gravitymeter ke harga miligal, selanjutnya dikoreksi dengan koreksi tinggi alat, koreksi pasang surut dan koreksi drift. Untuk memperoleh harga percepatan gravitasi mutlak di masing-masing titik amat, dilakukan konversi dari harga pembacaan dalam miligal ke harga percepatan gravitasi dalam miligal. Konversi ini dilakukan dengan cara mengurangi harga pembacaan dalam miligal masing-masing titik amat dengan harga pembacaan dalam miligal di titik ikat. Selisih titik-titik amat dengan titik ikat, dinamakan delta g relatif, ditambahkan pada harga percepatan gravitasi mutlak di titik ikat sehingga didapatkan harga percepatan gravitasi mutlak masing-masing titik amat (g observasi/g obs).
Tahapan selanjutnya harga gravitasi observasi tersebut direduksi dengan berbagai macam reduksi antara lain: reduksi gravitasi normal, reduksi udara bebas (free air), reduksi topografi dan diperoleh anomali Bouguer lengkap pada topografi (terletak pada ketinggian
f. Reduksi Gravitasi Teoritis (gn)
Aktivitas bumi yang berotasi pada sumbunya mengakibatkan bumi berbentuk spheroid dan
flat pada kedua kutubnya. Hal ini mengakibatkan medan gravitasi di kutub lebih besar
daripada di khatulistiwa, semakin ke kutub besar medan gravitasi semakin bertambah. Oleh karena itu besar medan gravitasi di suatu tempat dipengaruhi oleh lintangnya, sehingga reduksi lintang diperlukan dalam perhitungan gravitasi. Besarnya percepatan gravitasi sebagai fungsi lintang adalah (Kahar, 1990):
gn = g()978032.7(10.0053024sin20.0000058sin22)(6)
dengan φ adalah sudut lintang.
Persamaan (4.6) merupakan Geodetic Reference System 1980 (GRS 80). g. Reduksi Udara Bebas (rub)
Perbedaan ketinggian titik-titik amat yang bervariasi berpengaruh terhadap besarnya gravitasi pada titik amat tersebut. Nilai gravitasi berbanding terbalik dengan kuadrat jarak, sehingga semakin tinggi suatu tempat maka semakin kecil gravitasinya. Besarnya reduksi udara bebas (Untung dan Sato, 1978) yaitu – 0,3086h mgal/meter, dimana h adalah ketinggian titik amat terhadap sferoida acuan.
h. Reduksi Topografi (rtp)
Reduksi topografi merupakan gabungan dari reduksi Bouguer dan reduksi medan. Massa yang terletak antara titik amat dengan datum menimbulkan efek gravitasi, dan hal tersebut belum diperhitungkan dalam reduksi udara bebas, sehingga reduksi Bouguer dimaksudkan untuk mereduksi efek gravitasi yang ditimbulkan oleh massa tersebut. Reduksi Bouguer ini didasarkan pada suatu pengandaian bahwa titik amat berada pada suatu bidang horizontal yang luas dan mempunyai massa batuan dengan kerapatan tertentu. Apabila suatu titik amat terletak pada suatu slab atau daratan yang sangat luas, maka pembacaaan percepatan gravitasi di titik amat akan diperbesar oleh efek slab ini. Oleh karena itu reduksi Bouguer dikoreksikan berlawanan dengan reduksi udara bebas, yaitu dikurangkan apabila titik amat berada di atas datum. Reduksi Bouguer (Stacey, 1977) dirumuskan sebagai berikut :
h h
G
gb 2 0.04193 mgal (7)
dengan
ρ : rapat massa (densitas) slab Bouguer (gr/cm3)
h : ketinggian titik amat (meter)
Densitas Bouguer ditentukan dengan metode analitik Nettleton yaitu menggunakan persamaan matematis berikut ini (Safani, 2000):
n i i n i j j i n i i j j i h h g g h h g g k 1 2 1 2 1 ) ( ) ( ) ( ) ( (8) dengan k : koefisien korelasiΔgi (ρj) : Anomali Bouguer Sederhana (ABS) fungsi densitas
hi : ketinggian titik amat.
ρj : densitas batuan
) ( j
g
: rata-rata ABS sebagai fungsi densitas
h : rata-rata ketinggian titik amat
j : 1, 2, 3,…
Densitas yang dipilih yaitu densitas dengan nilai k = 0 karena harga anomali Bouguer dan harga ketinggiannya tidak terkorelasi, yang berarti bahwa densitas tersebut merupakan harga densitas massa topografi yang tepat. Metode analitik ini digunakan apabila titik-titik pengukuran terdistribusi secara merata.
Pada reduksi Bouguer dianggap bahwa permukaan lempeng di atas bidang acuan adalah rata. Pada kenyataannya tidak demikian , akan tetapi berlembah dan bergunung, sehingga tidak mewakili keadaaan yang sebenarnya. Terdapat lembah ataupun bukit akan mengurangi harga percepatan gravitasi di titik amat, hal ini disebabkan adanya pengaruh massa di bukit.
Gambar 1. Titik Amat diantara bukit, lembah dan slab Bouguer
Koreksi topografi dapat dihitung dengan menggunakan suatu paket program dalam bahas C++ berdasarkan pada sistem perhitungan yang diajukan oleh Forsberg (1984). Dalam metode yang diajukan Forsberg (1984) dibutuhkan data model ketinggian digital (Digital
Elevation Model) untuk luasan tertentu. U Data model ketinggian digital tersebut
didapatkan dengan menggunakan program Microdem-TerraBaseII, yang memiliki resolusi 900 meter.
Caranya adalah:
Buka program Microderm Terrabase =>> Microderm =>> File =>> Data
Manipulation => Import => DEMS => GTOPO30 => masukkan data di folder GTOPO (E100N40.HDR) =>Kemudian masukkan nilai latitude dan longitude daerah penelitian yang kira2 mencakup wilayah daerah penelitian => kemudian di save dalam .DEM
Masih dalam program Data Manipulation => Export => Ascii XYZ, full DEM => dibuka file yang di save dalam DEM tadi => kemudian di save dalam bentuk file XYZ.
File yang sudah dalam format XYZ ini dapat dibuka di surfer. Kemudian dipisahkan antara komponen x, y dan z nya.
Sesudah itu masuk ke program thopogcorr yang memiliki resolusi 900 m.
Bidang Bouguer Permukaan topografi Sferoida referensi ρ vo h ro A Q(ro)
Data X_DATA, Y_DATA, Z_DATA MERUPAKAN data asli posisi yang didapatkan dengan GPS, sedangkan X_TOPO, Y_TOPO, Z_TOPO, merupakan data yang didapatkan dari program MICRODERM dan semua masukan data ini dalam format .txt.
Kemudian dapat dihasilkan output file yang disave dalam format .txt.
Output file ini dapat dibuka di surfer ataupun excel dan akan menghasilkan kolom-kolom. Kolom yang ke-4 merupakan koreksi topografinya.
Data Topo dem File save Hasil koreksi topogr afi
i. Anomali Bouguer Lengkap (ABL)
Anomali bouguer lengkap merupakan harga anomali gravitasi di suatu tempat dimana perhitungannya telah memasukkan seluruh reduksi-reduksinya.
ABL = gobs – gn + rub – rtp (9)
dengan :
ABL : anomali Bouguer lengkap gobs : harga gravitasi pengamatan
gn : harga gravitasi normal (gravitasi teoritis) rub : reduksi udara bebas
rtp : reduksi topografi
Setelah semua koreksi diketahui untuk mendapatkan ABL dapat dibuat template yang dikerjakan pada program Excell
j. Proyeksi ke Bidang Datar
Anomali Bouguer lengkap diatas masih terletak pada topografi dengan ketinggian yang bervariasi. Oleh karena itu diperlukan suatu metode untuk membawa ke bidang datar. Salah satu metode tersebut adalah sumber ekivalen titik massa (Dampney, 1969).
Ini dapat dilakukan pada program Matlab dengan work dampney, dengan masukan file txt yang didalamnya terdiri dari 4 kolom x, y, z dan abl. Setelah diberi masukan nanti akan didapatkan output bidangdatarfix.txt
Setelah itu dapat di plot kembali dengan program surfer. Kemudian dapat dibuat kontur kontur gravitasi dalam surfer
IV. Interpretasi
Interpretasi data yang digunakan dalam metode gravitasi adalah secara kualitatif dan kuantitatif. Dalam hal ini interpretasi secara kuantitatif adalah pemodelan, yaitu dengan pembuatan model benda geologi atau struktur bawah permukaan dari respon yang ditimbulkan oleh medan gravitasi daerah penelitian. Pemodelan yang digunakan adalah benda 2 ½ dimensi seperti yang diajukan oleh Talwani (1959) dengan program komputer Grav-2DC. Sedangkan untuk interpretasi kualitatif dilakukan dengan cara menafsirkan peta kontur anomali Bouguer lengkap di bidang datar.
Untuk interpretasi kuantitatif dapat dilakukan dengan menslice kontur ABL yang tentunya dapat menggambarkan anomali pada lokasi penelitian. Hasil slice ini di save disave format
.dta Kemudian hasil slice tadi dibuat suatu bentuk permodelan dengan program Grav-2DC