BAB 2
LANDASAN TEORI
2.1Robot
Kata Robot pertama sekali muncul pada tahun 1920, berasal dari kata robota yang berarti pekerja sendiri dan dalam bahasa Ceko (negara Eropa Timur) berarti kerja paksa. Kata robot pertama kali diperkenalkan oleh seorang penulis dari Czech, Ceko yang bernama Karel Capek pada tahun 1921. Kata robot diperkenalkan kepada masyarakat dalam permainannnya di drama pentas RUR (Rossum’s Universal Robot), yang diterbitkan pada tahun 1920 (Nurmaini, 2012).
2.1.1 Sejarah Robot
Sejarah robot bermula ketika sistem otomatis dibuat oleh Jacques de Vaucanson pada tahun 1938, yang membuat bebek mekanik yang dapat memakan dan mencincang biji-bijian membuka dan menutup sayapnya. Kemudian tahun 1796, Hisashine Tanaga di Jepang berhasil membuat mainan mekanik yang dapat menghidangkan teh dan menulis huruf kanji. Lalu 1926, Nikola Tesla mendemonstrasikan perahu bot yang dapat dikontrol dengan radio. Tahun 1928, ahli biologi Makoto Nishimura membuat robot pertama di Jepang yang bernama Gakutensoku. Gakutensoku dibuat di Jepang dengan menggunakan teknologi barat dan diselesaikan di Osaka pada tahun 1929, Gakutensoku bisa mengubah ekspresi wajah dan menggerakkan kepala dan tangan melalui mekanisme tekanan udara. Ia memiliki panah sinyal berbentuk pena di tangan kanan dan lampu (Nurmaini, 2012).
direkayasa untuk meniru bentuk manusia dan fungsi, telah menjadi semakin mampu dalam beberapa tahun terakhir. Misalnya, Albert Hubo, dari Korea Advanced Institut Sains dan Teknologi (KAIST), mampu berjalan, berjabat tangan, pegang benda, dan berbicara dengan ekspresi wajah realistis. The Kawada HRP2 humanoid dapat melakukan rumit tarian tradisional Jepang. Semua robot ini mempertunjukan dan bagaimanapun telah melakukan gerakan koreografi yang direncanakan yang memiliki program yang cermat sesuai dengan gerakan tangan (Grunberg, 2010).
2.1.2 Karakteristik Robot
Sebuah robot umumnya memiliki karakteristik sebagai berikut:
1. Sensing: Robot dapat mendeteksi lingkungan sekitarnya (halangan, panas, suara, dan image).
2. Mampu Bergerak: Robot umumnya bergerak dengan menggunakan kaki atau roda, dan pada beberapa kasus robot dapat terbang dan berenang.
3. Cerdas: Robot memiliki kecerdasan buatan agar dapat memutuskan aksi yang tepat dan akurat.
4. Membutuhkan Energi yang Memadai: Robot membutuhkan catu daya yang memadai.
2.1.3 Tipe Robot
Robot didesain dan dibuat sesuai kebutuhan pengguna. Robot, hingga saat ini, secara umum dibagi menjadi beberapa tipe sebagai berikut:
1. Robot manipulator
dan komputer. Sedangkan robot mobil mengarah ke robot yang bergerak, meskipun nantinya robot ini juga memiliki manipulator.
2.2 Mikrokontroller ATMega8
AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register general-purpose, timer/counter fleksibel dengan mode compare, interrupt internal dan eksternal, serial USART, Programmable Watchdog Timer, dan mode power saving. Beberapa diantaranya mempunyai ADC dan
PWM internal. AVR juga mempunyai In-System Programmable Flash on-chip yang mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI (Djiwo, et al. 2009).
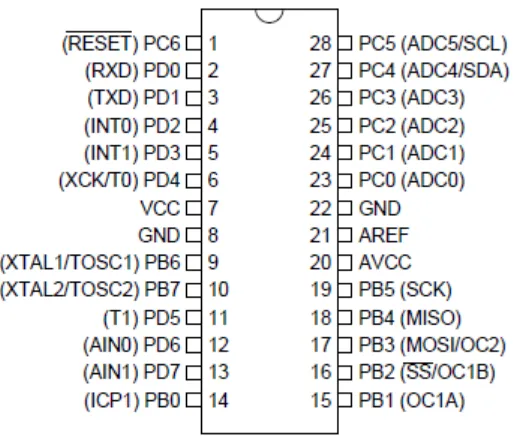
ATMEGA 8 adalah mikrokontroler CMOS 8-bit daya rendah berbasis arsitektur RISC yang ditingkatkan. Kebanyakan instruksi dikerjakan pada satu siklus clock, ATMEGA 8 mempunyai throughput mendekati 1 MPS per MHz membuat disain dari sistem untuk mengoptimasi konsumsi daya versus kecepatan proses. Susunan pin-pin dari IC mikrokontroler ATMEGA8 diperlihatkan pada gambar dibawah ini. IC ini tersusun dari 28 pin yang memiliki beberapa fungsi tertentu.
Penggunaan rangkaian mikrokontroler ATMega8 ada dua pilihan, dengan menggunakan board ATMega8 develompment board yang sudah ada dipasaran atau dengan membuat sendiri rangkaian mikrokontroler tersebut. Jika menggunakan rangkaian mikrokonter yang sudah tersedia dipasaran maka akan mempersingkat waktu pembuatan sistem, karena hanya tinggal membeli rangkaian berupa kit dan hanya tinggal menggunakannya. Chip yang dijelaskan di sini menggunakan kemasan PDIP, untuk kemasan yang lain (TQPF, QFN / MLF) tidak jauh berbeda. Untuk lebih jelasnya silakan merujuk ke data sheet. Nama-nama pin di atas berguna untuk penggunaan pheripheral internal.
ATMega8 memiliki 28 pin yang masing-masing pin-nya memiliki fungsi yang berbeda-beda baik sebagai port ataupun sebagai fungsi yang lain. Berikut akan dijelaskan tentang kegunaan dari masing-masing kaki pada ATMega8.
1. VCC
Merupakan supply tegangan untuk digital 2. GND
Merupakan ground untuk smua komponen yang membutuhkan grounding 3. Port B
Adalah 8 buah pin mulai dari pin B.0 sampai dengan pin B.7. Tiap pin dapat digunakan sebagai input dan juga output. Port B merupakan sebuah 8-bit bi-directional I/O port dengan internal pull-up resistor. Sebagai input, pin – pin yang terdapat pada port B yang secara eksternal diturunkan, maka akan mengeluarkan arus jika pull-up resistor diaktifkan. Jika ingin menggunakan tambahan kristal, maka cukup untuk menghubungkan kaki dari kristal ke kaki pada pin port B. Namun jika tidak digunakan, maka cukup untuk dibiarkan saja. Pengguna kegunaan dari masing- masing kaki ditentukan dari clock fuse setting-nya.
4. Port C
Port C merupakan sebuah 7-bit bi-directional I/O yang di dalam masing – masing pin terdapat pull-up resistor. Jumlah pin-nya hanya 7 buah mulai dari C.0 sampai dengan pin C.6. Sebagai keluaran / output, port C memiliki karakteristik yang sama dalam hal kemampuan menyerap arus (sink) ataupun mengeluarkan arus (source). 5. Reset / PC6
Jika RSTDISBL Fuse diprogram, maka PC6 akan berfungsi sebagai pin I/O. Untuk diperhatikan juga bahwa pin ini memiliki karakteristik yang berbeda dengan pin – pin yang tedapat pada port C. Namun jika RSTDISBL Fuse tidak di program, maka pin ini akan berfungsi sebagai input reset. Dan jika level tegangan yang masuk ke pin ini rendah dan pulsa yang ada lebih pendek dari pulsa minimum, makan akan menghasilkan suatu kondisi reset meskipun clock-nya tidak bekerja.
6. Port D
terdapat kegunaan-kegunaan yang lain. Pada port ini hanya berfungsi sebagai masukan dan keluaran saja atau biasa disebut dengan I/O.
7. AVCC
Pada pin ini memiliki fungsi sebagai power supply tegangan untuk ADC. Untuk pin ini harus dihubungkan secara terpisah dengan VCC karena pin ini digunakan untuk analog saja. Bahkan jika ACD pada AVR tidak digunakan, tetap saja disarankan untuk menghubungkan secara terpisah dengan VCC. Cara menghubungkan AVCC adalah melewati low-pass filter setelah itu dihubungkan dengan VCC.
8. AREF
Merupakan pin referensi analog jika menggunakan ADC. Pada AVR status Register mengandung beberapa informasi mengenai hasil dari kebanyakan hasil eksekusi instruksi aritmatik. Informasi ini dapat digunakan untuk altering arus program sebagai kegunaan untuk meningkatkan performa pengoperasian. Perlu diketahui bahwa register ini di-update setelah semua operasi ALU (Arithmetic Logic Unit). Hal tersebut seperti yang telah tertulis dalam datasheet khususnya pada bagian Intruction Set Reference.
Dalam hal ini untuk beberapa kasus dapat membuang kebutuhan penggunaan instruksi perbandingan yang telah didedikasikan serta dapat menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih sederhana dan singkat. Register ini tidak secara otomatis tersimpan ketika memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah setelah kembali dari interupsi. Namun hal iini harus dilakukan melalui software.
9. Bit 7 (1)
Merupakan bit Global Interrupt Enable. Bit ini harus di-set supaya semua perintah interupsi dapat dijalankan. Untuk fungsi interupsi individual akan dijelaskan pada bagian yang lain. Jika bit ini di-reset, maka semua perintah interupsi baik yang secara individual maupun yang secara umum akan diabaikan. Bit ini akan dibersihkan atau cleared oleh hardware setelah sebuah interupsi dijalankan dan akan di-set kembali
10. Bit 6 (T)
Merupakan bit Copy Storage. Instruksi bit Copy Instruction BLD ( Bit Load ) dan BST (Bit Store) menggunakan bit ini sebagai asal atau tujuan untuk bit yang telah dioperasikan. Sebuah bit dari sebuah register dan Register File dapat disalin ke dalam bit ini dengan menggunakan intruksi BST, dan sebuah bit di dalam bit ini dapat disalin ke dalam sebuah bit di register pada Register File dengan menggunakan perintah BLD.
11. Bit 5 (H)
Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatik BCD
12. Bit 4 (S)
Merupakan Sign bit. Bit ini selalu merupakan sebuah eksklusif di antara Negative Flag (N) dan Two’s Complement Overflow Flag (V).
13. Bit 3 (V)
Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi aritmatika dua komplemen.
14. Bit 2 (N)
Merupakan bit Negative Flag. Bit ini menyediakan sebuah hasil negative di dalam sebuah fungsi logika atau aritmatika.
15. Bit 1 (Z)
Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah hasil nol “0” dalam sebuah fungsi aritmatika atau logika.
16. Bit 0 (C)
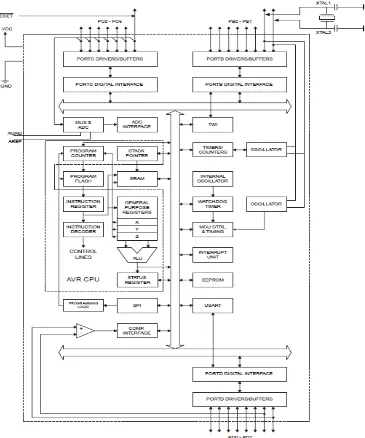
2.2.1 Arsitektur Microcontroller ATMega 8
Adapun arsitekture microcontroler ATMega8 dapat dilihat seperti pada Gambar 2.3 dibawah ini
Gambar 2.3 Arsitektur Microcontroller ATMega8 (Djiwo, et al. 2009).
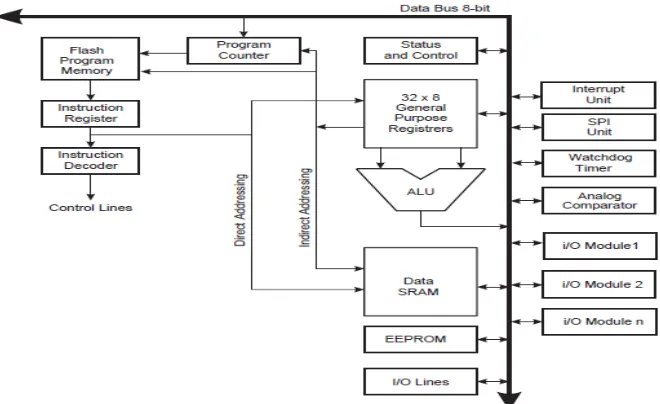
2.2.2 Cara Kerja Mikrokontroller
Prinsip kerja Microcontrolleradalah sebagai berikut:
1. Berdasarkan nilai yang berada pada register Program Counter, mikrokontroler mengambil data pada ROM dengan alamat sebagaimana yang tertera pada register Program Counter. Selanjutnya isi dari register Program Counter ditambah dengan satu (Increment) secara otomatis. Data yang diambil pada ROM merupakan urutan instruksi program yang telah dibuat dan diisikan sebelumnya oleh pengguna.
2. Instruksi yang diambil tersebut diolah dan dijalankan oleh mikrokontroler. Proses pengerjaan bergantung pada jenis instruksi, bisa membaca, mengubah nilai-nilai pada register, RAM, isi Port, atau melakukan pembacaan dan dilanjutkan dengan pengubahan data.
2.2.3 Fitur Microcontroller
A. Saluran I/O sebanyak 23 buah terbagi menjadi 3 port.
B. ADC sebanyak 6 saluran dengan 4 saluran 10 bit dan 2 saluran 8 bit. C. Tiga buah timer counter, dua diantaranya memiliki fasilitas pembanding. D. CPU dengan 32 buah register.
E. Watchdog timer dan oscillator internal. F. SRAM sebesar 1K byte.
G. Memori flash sebesar 8K Bytes system Self-programable Flash. H. Unit interupsi internal dan eksternal.
I. Port antarmuka SPI.
J. EEPROM sebesar 512 byte.
K. Port USART (Universal Syncronous and Asycronous Serial Receiver and Transmitter) untuk komunikasi serial.
2.3 Aktuator
Aktuator adalah bagian yang berfungsi sebagai penggerak dari perintah yang diberikan oleh input. Aktuator biasanya merupakan peranti elektromekanik yang menghasilkan gaya gerakan. Aktuator terdiri dari 2 jenis, yaitu:
1. Aktuator elektrik
2. Aktuator pneumatik dan hidrolik.
Pada penelitian ini aktuator yang akan digunakan adalah aktuator elektrik yang berupa motor DC yang akan dijelaskan sebagai berikut :
2.3.1 Motor DC
Motor DC merupakan alat yang berfungsi untuk merubah energi listrik menjadi energi gerak. Prinsip kerjanya adalah bila energi listrik dilewatkan pada sebuah konduktor maka arus akan mengalir pada konduktor tersebut dan akan dihasilkan sebuah medan magnet yang selanjutnya akan menghasilkan energi gerak. Besarnya gaya gerak yang dihasilkan bergantung pada 3 hal yaitu:
1. Arus yang melewati konduktor. 2. Panjang konduktor.
Dari ketiga factor tersebut dapat dirumuskan:
F = B X I X L ………. (2.1) Dimana :
F = Gaya gerak (newton) B = Kuat medan magnet (tesla)
I = Besar arus listrik pada konduktor (ampere) L = Panjang konduktor (meter)
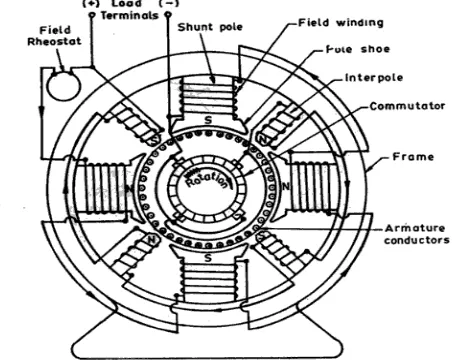
Motor DC mempunyai kecepatan putar yang cukup tinggi dan sangat cocok digunakan untuk roda robot yang membutuhkan kecepatan gerak yang tinggi. Pada penelitian ini motor DC digunakan sebagai penggerak utama robot.
Gambar 2.4 Struktur Motor DC (Waroh, 2014)
Bagian – bagian motor pada Gambar 2.4 adalah: 1. Armature core dan armature slot
Armature slot terbuat dari bahan magnet yang dilapisi baja, berbentuk slot yang dilas
bersama dengan armature core. 2. Armature winding
Merupakan belitan pada armature slot yang terhubung dengan komulator dan pada umumnya terbuat dari tembaga.
3. Field poles
4. Yoke
Berbentuk lingkaran yang terbuat dari baja yang menyediakan keperluad kutub magnet bagi pole
5. Brushes dan Brush holders
Brush holders memiliki pegas yang berfungsi untuk menjaga brush agar tetap
terhubung dengan komulator. Brush pada umumnya terdiri atas tembaga yang fleksibel. (Waroh, 2014)
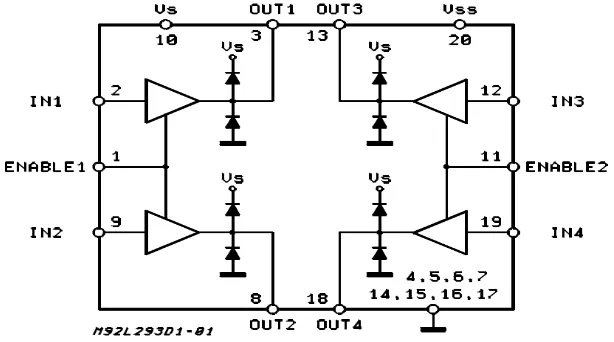
2.3.2 Motor Driver IC L293
Motor driver tipe IC L293 adalah IC Dual Full Bridge Driver yang beroperasi sampai tegangan 46V dan arus DC 4 A, yang didesain untuk menerima logic level TTL standar. IC ini berfungsi untuk men-drive induksi load seperti relay, solenoida, motor DC dan motor steper. Gambar 2.5 adalah blok diagram Motor driver tipe IC L293 (www.arduino.cc).
Gambar 2.5 Blok diagram motor driver tipe IC L293 (www.arduino.cc)
L293 mempunyai 2 output power stage yaitu A dan B pada gambar 2.6. Output power stage adalah sebuah konfigurasi bridge, dimana output-nya dapat men-drive
EnB. Input-an In akan men-set bridge bila input-an En high, sebaliknya bila input-an En low maka bridge tidak aktif.
2.4 Sensor
Sensor pada robot merupakan perangkat atau komponen pengumpul informasi lingkungan tempat robot berada. Berdasarkan masukan sensor-sensor yang terpasang, unit mikrokontroler dapat menganalisanya dan menentukan keputusan yang tepat sesuai dengan algoritma yang telah dirancang (Suryatini, et al. 2013).
Sensor yang digunakan dapat berupa sensor yang dibuat dari sistem yang paling sederhana seperti sensor ON/OFF menggunakan limit switch, sistem analog, sistem bus parallel, sistem bus serial, hingga sistem mata kamera yang masing-masing cara pengukuran dan cara interfacing ke kontrolernya berbeda-beda.
2.4.1 Sensor Ultrasonik
Sensor adalah sebuah alat yang menghasilkan sinyal keluaran untuk keperluan merasakan fenomena fisik, sensor juga sering disebut sebagai transducer, yakni alat yang mengubah dari sebuah bentuk fisik ke bentuk sinyal fisik yang berbeda bentuk, misal dari suhu ke sinyal listrik. Sensor Ultrasonik digunakan sebagai sensor jarak untuk menentukan jarak robot dengan benda disekitarnya sehingga robot dapat menentukan aksi apa yang harus dilakukan. Sensor Ultrasonik range finder ini secara khusus didesain untuk dapat mengukur jarak sebuah benda padat. Sensor mendeteksi jarak objek dengan cara memancarkan gelombang ultrasonik (40kHz) selama waktu pemancaran kemudian mendeteksi pantulannya. Sensor memancarkan gelombang ultrasonik sesuai dengan pulsa trigger dari mikrokontroler sebagai pengendali. (Suryatini, et al. 2013). Pada Gambar 2.6 merupakan bentuk dari sensor ultrasonik.
2.5 Kamera
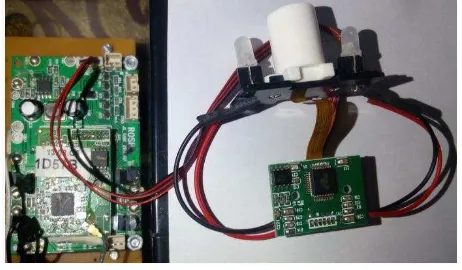
Kamera adalah alat optik yang dapat merekam suatu peristiwa atau kejadian penting dalam bentuk gambar atau foto sehingga peristiwa dalam bentuk gambar atau foto sehingga peristiwa itu dapat kita lihat kembali (Azikin, 2005). Cara kerja kamera sama seperti cara kerja mata. Bayangan nyata dari sebuah objek atau benda dibentuk oleh lensa cembung pada kamera. Bayangan nyata objek dan benda itu ditangkap oleh film kamera. Film pada kamera berfungsi sebagai layar untuk menangkap bayangan yang dibentuk oleh lensa. Pada penelitian ini menggunakan kamera yang terhubung secara langsung dengan WiFi Module melalui kabel, sehingga tidak dibutuhkan penyetelan apapun. Kamera dengan komponen pendukungnya dapat dilihat seperti pada Gambar 2.7.
Gambar 2.7 Kamera
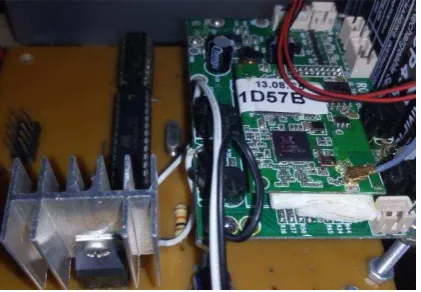
2.6 WiFi Module Rosh 1D57B
WiFi Module yaitu module yang akan mengubah dari standar komunikasi serial ke standar komunikasi menggunakan WiFi (WLAN) dan sebaliknya (Khan, at al.2014). WiFi Module berfungsi untuk menyediakan komunikasi data secara serial melalui jaringan nirkabel (wireless). WiFi Adaptor adalah alat penerima sinyal yang akan diteruskan pada WiFi Module. Dimana module ini akan menerima data dari smartphone Android dan kemudian data akan dikirimkan ke saluran serial yang kemudian masuk ke Mikrokontroler dan akan diproses oleh Mikrokontroler tersebut.
Gambar 2.8 WiFi Module Rosh 1D57B
2.7 Android
Android merupakan sebuah sistem operasi mobile yang namanya sedang melambung tinggi, dan mampu menyaingi sistem operasi mobile yang ada sebelumnya seperti, Windows mobile, iOS, Symbian dan masih banyak lagi. Android memiliki sistem
operasi berbasis Linux untuk perangkat portable seperti smartphone dan komputer tablet (Irawan, 2012). Sistem operasi android ini memiliki kelebihan yaitu open source, sehingga para programmer dapat mengembangkan atau menciptakan aplikasi sendiri. Android menggunakan bahasa java dalam pengembangan programnya. Android juga telah menyediakan Android market bagi para pengembang untuk menempatkan dan menjual aplikasi yang sudah di buat (Hermawan, 2011).
2.8 Penelitian Terdahulu
yang diciptakan untuk menggantikan peran seorang pelayan di rumah makan. Robot ini memiliki kemampuan untuk mengantarkan makanan dari home base menuju ke meja pesanan secara otomatis.
Tahun 2013 Suryatini et al melakukan penelitian robot pemadam api menggunakan sensor ultrasonik dengan metode algoritma wall follower. Pencarian titik api dilakukan dengan mendeteksi pancaran sinar ultraviolet yang dipancarkan api dengan menggunakan sensor api. Untuk memadamkan api digunakan kipas yang digerakkan oleh motor DC. Robot menggunakan sensor PING ultrasonic range finder untuk memandu navigasi robot dalam menghindari halangan, mendeteksi arah gerak robot.