LALU LINTAS
TUGAS AKHIR
Diajukan untuk memenuhi salah satu syarat Memperoleh gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun oleh:
FILLIPUS EDI WIBOWO
NIM : 005114080
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
AUTOMATIC RAILWAY CROSSING BAR
CONTROL TO SUPPORT THE PRIORITY
SYSTEM OF TRAFFIC LIGHT
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements
To Obtain the Sarjana Teknik Degree In Electrical Engineering
By :
FILLIPUS EDI WIBOWO
Student ID Number : 005114080
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
ENGINEERING FACULTY
SANATA DHARMA UNIVERSITY
Pernyataan Keaslian Karya
Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis
ini tidak memuat karya atau bagian karya orang lain, kecuali yang telah
disebutkan dalam kutipan dan daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, Maret 2007
Penulis
TUHAN adalah kekuatanku dan perisaiku;
kepada-Nya hatiku percaya. Aku tertolong
sebab itu beria-ria hatiku, dan dengan
nyanyianku aku bersyukur kepada-Nya.
(
Mazmur 28:7
)
Karya ini kupersembahankan untuk :
Tuhan Yesus Kristus & Bunda Maria
(
atas berkat dan rahmat-Nya
)
Budheku tercinta yang
selalu memberikan doa,
kekuatan dan mendidikku dengan
penuh cinta,
Adikku: B. Desi Deria
terima kasih atas dukungannya,
INTISARI
Banyak faktor yang membuat sering terjadinya kecelakaan kereta api antara lain karena keterlambatan tertutupnya palang pintu perlintasan rel kereta api. Untuk dapat mengurangi terjadinya kecelakaan diperlukan suatu pengendalian yang dapat mengendalikan palang pintu perlintasan rel kereta api. Pada saat ini pengendalian palang pintu perlintasan rel kereta api masih bersifat manual oleh karena itu diperlukan juga pengendalian palang pintu secara otomatis.
Dalam perancangan ini terdiri dari sensor (menggunakan fototransistor sebagai penerima dan inframerah sebagai pemancar), schmit trigger digunakan
sebagai pemantap tegangan, rangkaian penggerak relay digunakan untuk
menggerakkan motor, alarm digunakan sebagai tanda kereta api akan datang. Sebagai pengendali utama menggunakan mikrokontroller.
ABSTRACT
Many factors that make it railway train accident is too late closed the flea in transition railway train. And than to hurt accident happen needed ones of controller to can to bridle the flea in transition railway train. This time the command of the flea in transition railway train is manually, so needed a otomaticly the command of the flea in transition railway train.
On this project are sensor (to use fototransostor to receiver and infrared to transceiver), schmitt trigger used strengthen voltage, a chain relay movement used to move of a motor mecine, and the alarm used to give attention from railway train will comes. The praminent command used microcontroller.
KATA PENGANTAR
Puji dan syukur penulis panjatkan ke hadirat Tuhan Yang Maha Esa, oleh
karena kasih dan penyertaan-Nya sehingga penulis dapat meyelesaikan Tugas
Akhir yang berjudul “Pengendalian Palang Pintu Rel Kereta Api Secara Otomatis
Untuk Menunjang Sistem Prioritas Lamou Lalu Lintas”. Tugas Akhir ini disusun
sebagai salah satu syarat untuk memperoleh gelar Sarjana pada jurusan Teknik
Elektro, Fakultas Teknik Universitas Sanatha Dharma Yogyakarta.
Tersusunya tugas akhir ini tidak terlepas dari bantuan dan dukungan dari
berbagai pihak. Pada kesempatan ini tidak lupa penulis mengucapkan terima kasih
yang dalam kepada :
1. Bapak Ir. Iswanjono, M. T. selaku Dosen Pembimbing yang telah banyak
memberikan bimbingan dan pengarahan hingga tugas akhir ini dapat tersusun.
2. Seluruh Dosen dan Staff teknik Elektro USD.
3. Pak Jito, Mas Sur, Mas broto, Mas Mardi dan segenap staf serta karyawan
Fakultas Teknik USD, terimakasih atas keramahannya dan pelayanannya.
4. Staff dan Karyawan Perpustakaan kampus III Paingan.
5. Budheku tercinta atas dukungan dan cinta yang sangat luar biasa yang telah
diberikan dengan segenap kasih sayang.
6. Adikku B. Desi Deria atas dukungan dan semangatnya.
7. Bapak dan ibu serta keluarga atas doa dan restunya
8. Bapak dan keluarga ”Rambat” atas semua kasih sayang dan perhatian yang
diberikan.
9. Genduk tercinta yang memberikan semangat, kasih sayang dan
cerita-ceritanya.
10.Keluarga besar di Bantul yang memberikan semangatnya.
11.Teman-teman satu tim dalam PHK yang luar biasa semangatnya ” Danang,
Joko, David ” dan teman-teman tim yang lain.
12.Teman-teman seperjuangan: Aan “Bodonk”, Agung “greg”, Andi “gepeng”,
Indra, Si Boss, Widi, iyung, merry, keluarga besar “Glow” ( Iwan “Bali”,
Yasta, Robert, kita tetap teriak dan bermusik ) terima kasih atas sumbangsih
dan kerjasamanya, teman-teman TE 2000 dan semua saja yang tidak bisa
disebutkan satu persatu.
13.Teman-teman kost : Beta, Prima , Chandra, Didik, Adi, Oox, Nugie,
Cristhoper, Wahyu, Paul, Sadiman terimakasih atas titipan-titipan dikamarnya,
Dasrie, Art, Angga, Bayu “Letoy” terima kasih atas rasa kekeluargaannya.
14.Sisca “Wonder Women”, Mbak Epi atas semangatnya, Mbak pipiet, Dini
“Smart Girl” terima kasih atas kebersamaannya,
Semoga Tuhan membalas segala kebaikan yang telah diberikan kepada
penulis. Penulis sungguh sangat menyadari bahwa masih banyak kekurangan
dalam pembuatan dan penyusunan Tugas Akhir ini, maka dari itu segala saran dan
kritik yang bersifat membangun sangat diharapkan penulis.
Yogyakarta, Maret 2007
DAFTAR ISI
HALAMAN JUDUL ... .. i
HALAMAN PERSETUJUAN PEMBIMBING... .. iii
HALAMAN PENGESAHAN... .. iv
HALAMAN PERNYATAAN KEASLIAN KARYA... .. v
HALAMAN PERSEMBAHAN... .. vi
INTISARI... ... .. vii
ABSTRACT... ... .. viii
KATA PENGANTAR... .. ix
DAFTAR ISI... ... .. xi
DAFTAR TABEL... ... .. xiv
DAFTAR GAMBAR... .. xv
BAB I PENDAHULUAN... .. 1
1.1 Judul ... .. 1
1.2 Latar Belakang ... .. 1
1.3 Tujuan Penelitian ... .. 2
1.4 Manfaat Penelitian ... .. 2
1.5 Batasan Masalah ... .. 2
1.6 Metodologi Penelitian ... .. 3
BAB II DASAR TEORI ... .. 4
2.1 Fototransistor ... .. 4
2.3 Infra Red Emitting Diode ... .. 7
2.4 Schmitt Trigger (Pemicu Schmitt) ... ... 8
2.6 Relay ... .. 10
2.7 Alarm ... ... 10
2.8 Limit Switch ... ... 11
2.9 Motor DC ... .. . 11
3.0 Pengendalian Putaran ... .. 12
BAB III PERANCANGAN ALAT... .. 15
3.1 Mekanik Palang Pintu Rel Kereta Api ... .. 16
3.2 Pengendalian Palang Pintu Rel Kereta Api... .. 17
3.2.1 Sistem Otomatis ………. 17
3.2.1.1 Rangkaian Led Infra Merah ……… 19
3.2.1.2 Rangkaian Fototransistor ……… 21
3.2.1.3 Rangkaian pendeteksi arah datangnya kereta api .... 22
3.2.1.4 Rangkaian LED ... 22
3.2.1.5 Rangkaian Schmitt Trigger ...23
3.2.1.6 Saklar pemilih alarm ...25
3.2.1.7 Pengendali Arah Putaran Motor………..26
3.2.2 Sistem Manual ...29
3.2.2.1 Sistem alarm ...29
BAB IV HASIL PENGAMATAN DAN PEMBAHASAN . ... ..31
4.1. Pengamatan Cara Kerja Alat ...31
4.2. Pengamatan Pada Sensor Fototransistor ...32
4.3. Pengamatan Penggerak Relay pada Alarm ... ... 34
4.4. Pengamatan Penggerak Relay pada Motor ...35
4.5. Pengamatan Keadaan Pada Limith Switch...36
4.6. Pengamatan Kecepatan Pada Putaran Motor DC...37
BAB V KESIMPULAN DAN PENUTUP ...39
5.1 Kesimpulan...39
5.2 Saran ……...39
DAFTAR PUSTAKA ……...40
DAFTAR TABEL
Tabel 2.1 Output pemicu schmitt ... 8
Tabel 3.1 Pendeteksi posisi sensor... 18
Tabel 3.2 Arah putaran motor DC... 28
Tabel 4.1 Tegangan keluaran sensor fototransistor... 33
Tabel 4.2 Tegangan keluaran dari inverter DM74LS14 ... 33
Tabel 4.3 Keadaan pada rangkaian penggerak alarm... 35
Tabel 4.4 Keadaan pada rangkaian penggerak motor ... 35
Tabel 4.5 Keadaan pada limith switch ... 37
DAFTAR GAMBAR
Gambar 2.1 Rangkaian fototransistor ... 5
Gambar 2.2 Simbol Light Emitting Diode (LED)... 6
Gambar 2.3 Rangkaian IRED... 7
Gambar 2.4 Pemicu Schmitt ... 8
Gambar 2.5 Rangkain transistor PNP sebagai saklar... 9
Gambar 2.6 Relay... 10
Gambar 2.7 (a) Bentuk Fisik limit switch (b) Simbol limit switch... 11
Gambar 2.8 Simbol Motor DC... 12
Gambar 2.9 Hukum Lorentz... 12
Gambar 2.10 Dasar pengaturan arah putaran motor ... 13
Gambar 2.11 Pengendalian putaran motor... 13
Gambar 3.1 Diagram blok pengendalian palang pintu rel kereta api... 15
Gambar 3.2 Mekanik gerbang pintu ... 16
Gambar 3.3 Rancangan sensor pendeteksi kereta api ... 17
Gambar 3.4 Sensor pendeteksi kereta api ... 19
Gambar 3.5 Rangkaian Led infra merah... 20
Gambar 3.6 Rangkaian fototransistor ... 21
Gambar 3.7 Rangkaian pendeteksi arah datangnya kereta api ... 22
Gambar 3.8 Rangkain LED... 23
Gambar 3.9 Konfigurasi pin-pin IC 7414 ... 23
Gambar 3.10 Bentuk gelombang input dan outputSchmitt Trigger... 24
Gambar 3.11 Saklar pemilih alarm ... 26
BAB I
PENDAHULUAN
1.1
Judul
Pengendalian Palang Pintu Rel Kereta Api Secara Otomatis Untuk Menunjang
Sistem Prioritas Lampu Lalu Lintas.
1.2
Latar Belakang Masalah
Perkembangan transportasi modern saat ini perlu ditunjang dengan sistem
keamanan yang baik. Baik secara internal atau eksternal memberi keamanann dan
kenyamanan bagi para pengguna. Kereta api merupakan salah satu alat
transportasi yang ada di negara kita dan sangat banyak orang yang menggunakan
sarana ini. Namun tak jarang pula terjadi kecelakaan yang menimbulkan banyak
korban. Kecelakaan ini terjadi antara kendaraan(mobil, sepeda motor, dll) dengan
kereta api di depan gerbang atau palang pintu yang menutup jalan raya yang
memotong rel kereta api. Hal ini terjadi karena sistem yang digunakan pada
gerbang rel kereta pembuka dan penutup palang pintu masih bersifat manual
sehingga keterlambatan dalam menutup menimbulkan akibat yang fatal.
Keterlambatan dalam menutup bisa saja terjadi akibat kelalaian operator, misalkan
mengantuk, sehingga mengabaikan jadwal kereta yang akan melintasi rel pada
palang itu.
Di negara kita sendiri saat ini pengendalian palang pintu rel kereta api
pembuka dan penutup palang kereta api secara otomatis sehingga dapat memberi
keamanan, baik bagi para pengguna transportasi ini maupun bagi para pengguna
jalan raya dan juga membantu pihak petugas palang pintu kereta api dalam
menjalankan tugas dengan baik. Dan sebagai sarana pendukung alat digunakan
aplikasi mikrokontroler AT89S51.
1.3
Tujuan Penelitian
Tujuan yang ingin dicapai dalam tugas akhir ini yaitu membuat perangkat
keras pengendalian model untuk palang pintu kereta api secara otomatis dan
manual.
1.4
Manfaat Penelitian
Memperkecil kecelakaan yang mungkin terjadi di perlintasan kereta api
akibat kesalahan dan kelalaian manusia.
1.5
Batasan Masalah
Batasan masalah yang dibahas dalam penelitian palang pintu kereta api
sebagai berikut :
1. Menggunakan satu jalur kereta api.
2. Menggunakan inframerah sebagai pemancar dan sebagai penerima
digunakan fototransistor.
3. Kondisi kereta api jalan terus
5. Kondisi palang pintu dua searah.
6. Menggunakan 2 motor DC sebagai penggerak palang pintu.
7. Penggunaan manual digunakan apabila mikrokontroler mati.
8. Alarm yang dipakai khusus.
1.6 Metodologi Penelitian
Metodologi penelitian dalam merancang dan membuat peralatan sisitem
ini, diperlukan langkah-langkah sebagai berikut :
1. Studi literatur tentang permasalahan yang ada, serta mempelajari cara
kerja dan sekaligus cara merancang dan membuat peralatan tersebut.
2. Perancangan peralatan menggunakan teori yang ada untuk
mendapatkan karakteristik yang sesuai dengan spesifikasi yang
ditentukan.
3. Pembuatan peralatan untuk setiap bagian sistem sesuai dengan fungsi
masing-masing dan diuji kesesuaian. Bagian tersebut kemudian
BAB II
DASAR TEORI
Pengendalian model palang pintu kereta api ini tergantung dari kereta api
yang melintas dan mengenai sensor yang dipasang, yang terdiri dari rangkaian
fototransistor, infra merah yang berfungsi sebagai masukan dan sensor keluaran,
pengkondisi sinyal, saklar manual dan otomatis, penguat arus (driver), dan motor
DC. Penjelasan tentang beberapa komponen yang digunakan dalam perancangan
alat ini dan aplikasinya dalam rangkaian akan dijelaskan dalam bab ini.
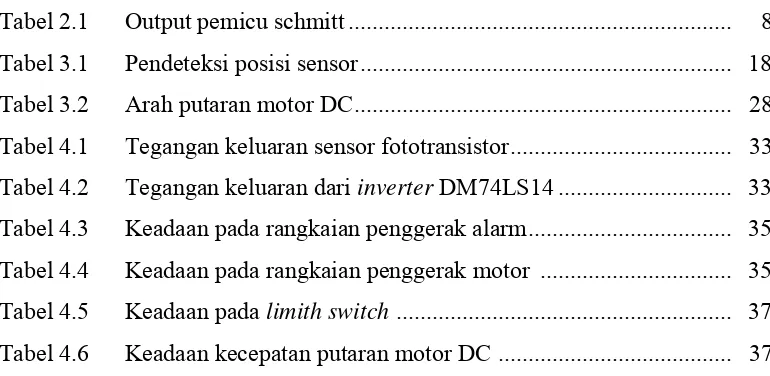
2.1. Fototransistor
Fototransistor adalah piranti peka cahaya atau sering disebut sebagai
transduser fotoelektrik, yaitu piranti elektronis yang memiliki perubahan
karakteristik listrik bila dikenai cahaya tampak maupun tak tampak. Fototransistor
terbentuk oleh transistor, sehingga memiliki sifat yang mirip dengan Bipolar
Junction Transistor (BJT), hanya saja secara fisik sangat berbeda satu sama lain.
Fototransistor didesain dengan penutup transparan yang berfungsi untuk
meneruskan atau menerima cahaya, sedangkan BJT didesain dengan penutup yang
tidak transparan supaya cahaya tidak tembus sehingga tidak mempengaruhi kerja
BJT. Kemasan fototransistor dapat dijumpai sebagai piranti dua terminal tanpa
koneksi basis dan piranti 3 terminal dengan koneksi basis.
Pada fototransistor, arus basis dipengaruhi oleh cahaya infra merah yang
mengenai permukaan fototransistor akan timbul arus basis (IB). Keadaan tersebut
akan menyebabkan resistansi emitor-kolektorakan menjadi kecil sekali mendekati
nol, sehingga arus akan mengalir ke kaki kolektor (IC). Hal ini menyebabkan
tegangan pada kaki kolektor mendekati 0V. Keadaan tersebut menyatakan
keadaan transistor dalam keadaan on. Sebaliknya apabila tidak ada cahaya infra
merah atau dapat dikatakan dalam keadaan gelap, maka tidak ada IB. Ketika tidak
ada arus IB, maka resistansi emitor-kolektor menjadi besar dan tidak ada arus
kolektor (I
B
C), sehingga tegangan di kaki kolektor terhadap ground (Vc) sama
dengan Vcc, sehingga transistor dalam keadaan off. Rangkaian fototransistor dapat
dilihat pada gambar 2.1.
Gambar 2. 1 Rangkaian fototransistor
Untuk mencari nilai Rc pada gambar 2.1 digunakan persamaan :
C C CE
CC V R I
V − =
C CE CC C
I V V
Dengan :
Rc = Resistor yang dibutuhkan (Ohm)
Vcc = Tegangan masukan (Volt)
CE
V = Tegangan kolektor Emitor (Volt)
Ic = Arus yang melewati kolektor (Amper)
2.2
Light Emitting Diode
Light Emitting Diode atau biasa disingkat LED adalah sebuah dioda yang
mampu memancarkan cahaya. Prinsip kerja dari LED sama dengan dioda yang
biasa ditemui. Dioda biasa saat dibias maju akan menghasilkan energi yang
diradiasikan menjadi panas, sedangkan energi yang dihasilkan LED diradiasikan
menjadi cahaya.
Dioda biasanya dibuat dari silikon sedangkan LED dibuat dari gallium,
arsenic, atau phosporus. LED dapat memancarkan cahaya yang tampak oleh mata
yaitu merah, hijau, kuning, biru, jingga. Gambar 2.2 memperlihatkan simbol light
emitting Diode (LED).
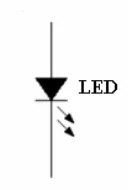
2.3
Infra Red Emitting Diode
Infra Red Emitting Diode (IRED) adalah salah satu jenis LED. IRED
mempunyai karakteristik yang sama dengan LED, hanya saja cahaya yang
dipancarkan berbeda. LED memancarkan cahaya tampak, sedangkan IRED sesuai
dengan namanya memancarkan infra merah yang tak tampak oleh mata manusia.
Gambar 2.3.adalah rangkaian dasar dari LED infra 0merah.
Gambar 2.3 Rangkaian IRED
Dengan melihat Gambar 2.3, maka dapat dicari nilai Rd dengan
persamaan : VCC −VD =IDRd
D D CC d
I V V
R = − ...( 2.2 )
Dengan :
Rd = Resistor yang dibutuhkan (Ohm)
VCC = Tegangan Masukan (Volt)
VD = Tegangan Maju LED (Volt)
2.4
Schmitt Trigger
(Pemicu Schmitt)
Pemicu Schmitt merupakan suatu contoh kategori rangkaian yang dikenal
sebagai pembanding tegangan. Pembanding disini sangat berguna dalam
pembentuk pulsa dan sebagai suatu piranti pengkondisi sinyal. Pemicu Schmitt
menghasilkan suatu keluaran segi empat dengan pinggiran naik dan turun yang
tajam. Waktu bangkit yang cepat ini sangat dibutuhkan, karena
rangkaian-rangkaian dimaksudkan untuk bekerja dengan tegangan masukan dua keadaan.
Gambar 2.4 memperlihatkan gambar pemicu Schmitt.
Gambar 2.4 Pemicu Schmitt
Tabel 2.1Output
Input Output
0 1
1 0
Pada tabel 2.1, dapat dilihat bila masukan rendah maka keluarannya akan tinggi
dan bila masukan tinggi maka keluarannya akan rendah karena merupakan
2. 5 Transistor Sebagai Saklar
Cara paling sederhana penggunaan transistor adalah sebagai saklar,
dimana transistor dioperasikan pada keadaan saturasi atau cut-off. Ketika
transistor pada keadaan saturasi, transistor seperti saklar yang tertutup (on) dari
kaki kolektor dan emitor. Ketika transistor pada keadaan cut-off, transistor seperti
saklar yang terbuka
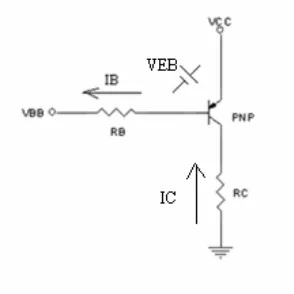
Transistor berfungsi sebagai saklar bila berada dalam keadaan cut-off atau
saturasi. Gambar 2. 5 memperlihatkan transistor PNP sebagai saklar.
Gambar 2. 5 Rangkaian transistor PNP sebagai saklar
Pada gambar 2. 5 di atas berlaku persamaan :
0 = + +
+
−VCC VEB IBRB VBB ………….………(2. 3)
Dimana :
B
C I
I =β ……….(2. 4)
Saklar PNP dalam keadaan on ketika VBB sama mendekati 0 Volt dan off
2.6
Relay
Relay merupakan suatu saklar yang bekerja berdasar sistem elektro
magnetis untuk mengoperasikan seperangkat kontak. Relay terdiri atas kumparan
kawat penghantar yang digulung pada former teras magnet. Apabila kumparan
diberi arus, maka medan magnet yang dihasilkan kumparan akan menarik
pengungkit yang berfungsi sebagai penutup atau pembuka kontak. Gambar relay
dapat dilihat pada Gambar 2.6.
3
5
4 1
2
COM
NO NC
Gambar 2.6Relay
Relay akan bekerja apabila dikendalikan atau diberi tegangan dari luar.
Pada relay terdapat 2 jenis keadaan normal sebelum terpengaruh kontrol dari luar,
yaitu :
1. Normally open (NO) yaitu keadaan awal kontaktor terbuka.
2. Normally close (NC) yaitu keadaan awal kontaktor tertutup.
2.7 Alarm
Alarm adalah suatu perangkat suara yang digunakan untuk
untuk penunjuk kebakaran, penunjuk banjir, dll. Bunyi yang dikeluarkan pun
berbeda-beda tergantung dari suatu keadaan yang terjadi.
2.8
Limit Switch
Limit switch adalah rangkaian mekanik sensor posisi yang digunakan
dalam proses untuk membatasi gerakan. Pada limit switch terdapat kontak NO
(normally open) dan NC (normally close). Prinsip kerja limit switch, pada saat
limit switch dalam keadaan normal maka kontak NO tidak terhubung pada
terminal common, dan terminal NC terhubung pada terminal common. Gambar 2.7
merupakan bentuk fisik dari limit switch dan simbol kontak-kontak pada limit
switch.
( a ) ( b )
Gambar 2.7 (a) Bentuk fisik limit switch (b) Simbol limit switch
2.9 Motor DC
Motor adalah suatu mesin listrik yang menghasilkan gerak mekanis
dengan prinsip elektromagnetik. Motor arus searah (DC) membutuhkan tegangan
Gambar 2.8
Simbol Motor DCElektromagnetik dalam motor DC terjadi ketika arus yang menghantar
ditempatkan dalam medan magnet. Fluks melintasi celah udara dari satu kutub
utara magnet ke kutub selatan magnet. Hukum Lorentz menyatakan bahwa arus
yang menghantar yang ditempatkan dalam medan magnet akan menciptakan
tenaga (force). Tenaga (F) yang ditimbulkan tersebut tegak lurus terhadap arus (I),
dan medan fluks (B). Hal ini dapat dilihat pada gambar 2.9.
Gambar 2.9 Hukum Lorentz
3.0 Penggendali Putaran Motor
Sebagai penggerak digunakan motor DC. Motor DC dipakai secara luas
dalam dunia industri dan aplikasi sehari-hari. Hal ini didukung oleh sifat motor
DC itu sendiri diantaranya murah, kecepatannya konstan dan dapat diatur.
Kekurangannya motor DC tidak dapat dipakai untuk mendapatkan pergerakan
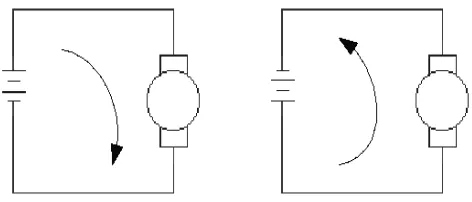
Dalam aplikasinya seringkali sebuah motor digunakan untuk arah yang
searah dengan jarum jam maupun sebaliknya. Untuk mengubah putaran dari
sebuah motor dapat dilakukan dengan mengubah arah arus yang mengalir melalui
motor tersebut. Secara sederhana dapat dilihat seperti pada gambar 2.10, hal ini
dapat dilakukan hanya dengan mengubah polaritas tegangan motor. Untuk dapat
menggerakkan dan mengendalikan motor menggunakan relay.
Gambar 2.10 Dasar pengaturan arah putar motor
Agar pengubahan polaritas tegangan motor dapat dilakukan dengan mudah, maka
hal ini dapat dilakukan dengan menggunakan empat buah saklar seperti pada
gambar 2.11
Untuk memutar motor searah jarum jam maka saklar S1 dan S4 ditutup.
Sedangkan saklar S2 dan S3 dibuka. Untuk memutar motor berlawanan arah jarum
BAB III
PERANCANGAN ALAT
Perangkat Keras Palang Pintu Rel Kereta Api
Pengendalian model palang pintu perlintasan kereta api untuk perangkat
keras terdiri dari sensor, pembanding, schmit trigger, driver, motor penggerak
palang pintu kereta api. Gambar diagram blok pengendalian palang pintu seperti
pada gambar 3.1.
Sensor 1
Sensor 2
Sensor 6 Sensor 5 Sensor 3
Lampu indikator 1
Pengkondisi Sinyal Modul Alarm Tombol Manual
Mikro
kontrol
er
Pengkondisi Sinyal Pengkondisi Sinyal Pengkondisi Sinyal Pengkondisi Sinyal Pengkondisi Sinyal Pusat kendali Lampu Indikator Motor Motor Penggerak MotorLampu indikator 2
Sensor 4
Tombol Manual
Gambar 3.1 Diagram Blok Pengendalian Palang Pintu Rel Kereta api
Parangkat keras palang pintu rel kereta api dibagi menjadi dua bagian
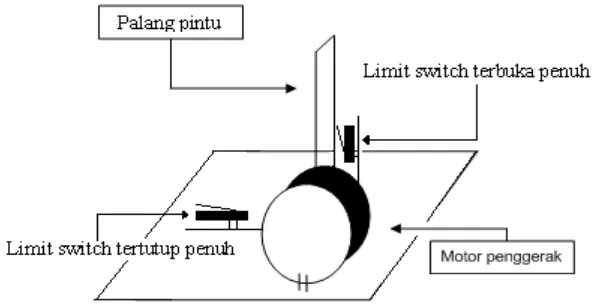
3.1 Mekanik Palang Pintu Rel Kereta api
Mekanik palang pintu rel kereta api terdiri dari bagian penyangga untuk
meletakkan komponen elektronik, rel kereta api, dan mainan kereta api itu sendiri.
Papan sebagai penyangga, terdiri dari :
1. Tombol manual.
2. Modul motor untuk menggerakkan model palang pintu.
3. Modul alarm
4. Rel kereta api.
5. Kereta api.
Gambar 3.2 memperlihatkan mekanik gerbang pintu yang di gunakan.
Gambar 3.3 memperlihatkan rancangan sensor pendeteksi kereta api
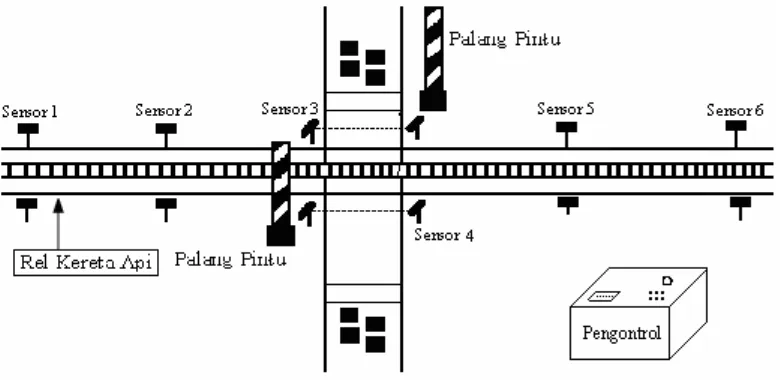
Gambar 3.3 Rancangan sensor pendeteksi kereta api
3.2 Pengendalian Palang Pintu Rel Kereta Api
Pengendalian palang pintu rel kereta api terdiri dari dua model yaitu model
otomatis dan model manual
3.2.1 Sistem Otomatis
Pendeteksian kereta api pada palang pintu secara otomatis menggunakan
sensor. Sensor pendeteksian ini terletak disebelah kiri dan disebelah kanan dari
palang pintu rel kereta api. Cara kerja pengendalian palang pintu rel kereta api
secara otomatis yaitu apabila kereta api datang dari arah kiri, sensor 1 terhalang
maka menunjukkan dari arah kiri datangnya kereta api. Selang beberapa saat
sensor 2 akan terhalang sehingga akan membunyikan alarm. Selama alarm
berbunyi sensor 3 dan 4 akan mendeteksi keberadaan kendaraan di sekitar palang
pintu rel kereta api. Apabila masih ada kendaraan maka palang pintu rel kereta api
turun. Setelah melewati palang pintu rel kereta api maka sensor 5 akan terhalang
sehingga alarm akan mati dan palang pintu akan terbuka. Untuk sensor 6, apabila
terhalang maka digunakan untuk mengetahui keberadaan kereta sudah lewat. Dan
semua itu berlaku bila kereta api itu datang dari arah kanan atau sebaliknya.
Untuk mengetahui pendeteksian posisi sensor dapat dilihat pada tabel 3.1
Tabel 3.1 Pendeteksian posisi sensor
S1 S2 S3 S4 S5 S6 KETERANGAN
0 0 0 0 0 0 Buka
1 0 0 0 0 0 Lampu indikator kiri nyala
0 1 1 1 0 0 Dari kiri alarm hidup, palang pintu belum
tertutup
0 1 0 0 0 0 Dari kiri alarm hidup dan palang pintu
tertutup
0 0 0 0 1 0 Dari kiri alarm mati, palang pintu terbuka
0 0 0 0 0 1 Lampu indikator kanan nyala
0 0 1 1 1 0 Dari kanan alarm hidup, palang pintu belum
tertutup
0 0 0 0 1 0 Dari kanan alarm hidup dan palang pintu
tertutup
0 1 0 0 0 0 Dari kanan alarm mati, palang pintu terbuka
Pada sistem otomatis ini, sensor terdiri dari dua bagian yaitu bagian
pemancar (infra merah) dan penerima (fototransisitor). Pemancar bertugas untuk
memancarkan cahaya inframerah. Pemantulan cahaya inframerah bertujuan untuk
menghasilkan pantulan cahaya yang kemudian digunakan untuk mengetahui
keberadaan penghalang. Sedangkan bagian penerima yakni sebuah foto transistor
` Gambar 3.4 Sensor pendeteksi kereta api
Pada gambar 3.4 saat kereta api terdeteksi oleh rangkaian pendeteksi
(sensor) maka fototransistor akan OFF, tegangan antar kolektor terhadap emitor
menjadi tinggi (Vce ≅ Vcc), keluaran pada IC 7414 menjadi logika rendah (0).
Pada saat kereta tidak terdeteksi maka fototransistor akan ON, keluaran pada IC
7414 menjadi logika tinggi (1). Output dari fototransistor akan masuk ke
rangkaian Schmitt Trigger.
3.2.1.1 Rangkaian LED Infra Merah
Pada perancangan rangkaian pengendalian palang pintu kereta api
digunakan IRED dengan tipe QED 233. IRED QED 233 ini dari datasheet
mempunyai karakteristik dengan arus maju (ID) maksimal sebesar 100 mA,
dengan tegangan maju 1,6 V. Dengan menggunakan persamaan 2.2 dapat
Ω = −
= − 34
10 100 6 , 1 5 3 x V V Rd
Dengan menggunakan persamaan 2.2 akan di dapatkan nilai resistor (Rd)
yang akan digunakan. Pada perancangan ini digunakan tegangan dari catu daya
sebesar 5 Volt dan nilai ILED yang dipakai pada perancangan ini sebesar 10 mA.
3 10 10 6 , 1 5 − − = x Rd Ω =340 d R
Karena nilai resistor yang dibutuhkan tidak ada di pasaran maka
digunakan nilai Rd sebesar 330 ohm seperti pada gambar 3.5. Jika digunakan Rd =
330 Ω, maka besar arus ILED yang mengalir adalah :
d LED CC LED R V V I = −
A
ILED 0,0103
330 6 , 1 5 = − =
3.2.1.2 Rangkaian Fototransistor
Fototransistor yang digunakan pada perancangan ini adalah fototransistor
tipe UT6W95-AE-0125 (NPN). Dari datasheet diperoleh besarnya arus yang
dibutuhkan fototransistor pada keadaan ON adalah Ic = 0,1 mA, VCESAT = 0,4 V.
Pada perancangan ini digunakan Ic = 0,085 mA, sehingga dengan menggunakan
persamaan 2.1 dapat diketahui besarnya nilai Rc.
Ω =
−
= − K
x
RC 54,1 10 085 , 0 4 , 0 5 3
Karena dipasaran tidak terdapat resistor sebesar 54,1 KΩ maka digunakan resistor
sebesar 56 KΩ. Jika digunakan R = 56 KΩ, maka besar arus Ic yang mengalir
adalah :
R V V
I CC CE C
− =
mA K
IC 0,082
56 4 , 0 5 = − =
3.2.1.3 Rangkaian pendeteksi arah datangnya kereta api
Dimana terdapat dua buah sensor pendeteksian kereta api yaitu disebelah
kiri dan kanan dari palang pintu rel kereta api. Rangkaian pendeteksian ini
digunakan untuk mengetahui dari mana datangnya kereta api. Rangkaian ini
terdiri dari inframerah, fototransistor, dan led. Gambar 3.7 menggambarkan
rangkaian pendeteksi arah datangnya kereta api.
Gambar 3.7 Rangkaian deteksi arah datangnya kereta api
3.2.1.4 Rangkaian LED
Rangkaian lampu digunakan untuk mengetahui apakah mikrokontroler
mati atau hidup. Penggunaan resistor 330 Ω untuk membatasi arus, dengan
tegangan Vcc 5 Volt maka arusnya sekitar:
I = R
VCC
I =
Ω
I = 15 mA
Gambar 3.8 Rangkaian LED
3.2.1.5 Rangkaian Schmitt Trigger
Keluaran dari fototransistor masuk ke rangkaian Schmitt Trigger.
Rangkaian ini berfungsi untuk mempersegikan isyarat sinus sebelum masuk ke
mikrokontroler. IC yang digunakan adalah IC 7414, IC 7414 adalah rangkaian
schmit trigger inverting. Jadi keluaran dari rangkaian schmit trigger merupakan
kebalikan dari masukan yang masuk ke dalam Schmitt Trigger, sehingga masukan
ke mikrokontroler kondisi logikanya tidak sama dengan keluaran fototransistor.
Gambar 3.9 memperlihatkan konfigurasi pin-pin IC 7414 dan gambar 3.10
memperlihatkan bentuk gelombang masukan dan keluaran.
Tegangan ambangnya adalah :
VT+ = 1,8 V
VT- = 0,9 V
Sedang tegangan keluaran rendah dan tinggi adalah:
Voh = 3,4 V
Vol = 0,25 V
Gambar 3.10 Bentuk gelombang input dan output Schmitt Trigger
Dari gambar 3.10, saat masukan 0V hingga 0,9V maka keluaran rangkaian schmitt
trigger adalah 3,4V. Saat tegangan masukan 0,9V hingga 1,8V keluarannya tetap
3,4V mengikuti tegangan keluaran sebelumnya. Tapi ketika input lebih dari 1,8V
3.2.1.6 Saklar pemilih alarm
Untuk menghidup matikan alarm dan motor di gunakan Switching
Transistor yang berfungsi sebagai saklar elektronik. Rangkaian ini, sinyal
masukannya berlogika 1 (5 volt) atau 0 (0 volt) dari mikrokontroler. Nilai ini
dipakai untuk bias pada kaki basis transistor dengan emitor dan kolektor sebagai
penghubung (short circuit) atau sebagai pembuka rangkaian (open circuit). Begitu
rangkaian short circuits arus akan mengalir dari kaki kolektor ke emitor. Gambar
3.11 adalah skema switching transistor. Untuk mengetahui nilai arus pada Ic
(arus kolektor) jika tegangan masukan 5 V dengan hambatan dalam speaker
adalah 8Ω. Transistor NPN BD139 (β = 50) maka IB dapat diketahui adalah :
Ic = R D Vcc
Ic =
8
Ω
5
V
Ic = 625 mA
Maka untuk mengetahui arus basis dengan rumusan
Ib =
β
Ic
Maka nilai Ib-nya :
Ib = 50
625mA
Ib = 12,5 mA
B BE BB B I V V
R = −
3 10 . 5 , 12 7 , 0 5 − −
=
V v BR
B
R = 344 Ω
Karena nilai resistor yang dibutuhkan tidak ada di pasaran maka digunakan nilai
sebesar 330 Ω.
B
R
BD 139
330 Ohm Modul
Alarm
Dari Mikrokontroler
Vcc 5 V
RELAY 6 V
3 5 4 1 2
Gambar 3.11 Saklar pemilih alarm
3.2.1.7 Pengendali Arah Putaran Motor
Dua buah motor DC sebagai penggerak dan menentukan arah. Pada
gambar 3.12 motor Dc dipasang secara seri dan diletakkan berseberangan untuk
menggerakkan palang pintu. Perancangan elektronik menggunakan relay dan
rangkaian Switching Transistor (prinsip kerjanya sama dengan pensaklaran pada
RELAY Micro1 3 5 4 1 2 BD 139 A -+ MOTOR DC1 1 2 DIODE
Vcc 12 V RELAY 12 V
3 4 5 6 8 7 1 2 DIODE Limit Switch2 3 2 Q2 15 K In 1 BD 139 A + -MOTOR DC2 2 1 15 K In 2
RELAY 12 V
3 4 5 6 8 7 1 2
RELAY Micro2
3 5 4 1 2 Q1 Limit Switch1 3 2
Gambar 3.12 Pengendalian arah putaran motor
Pada gambar 3.12 rangkaian pengendali arah motor DC ini menggunakan
pengendalian berurutan atau sekuensial. Proses kendali dalam hal ini ditentukan
oleh logika dari In1 dan In2, dimana agar motor tersebut bekerja, maka kondisi In1
dan In2 harus saling berbeda logika. Motor akan berhenti apabila keduanya
berlogika 0. Begitu juga bila In1 dan In2 berlogika1.
Pada saat In1 berlogika 1 dan In2 berlogika 0, maka transistor Q1 akan aktif
sedangkan Q2 tidak aktif. Sehingga akan menggeerakkan motor searah jarum jam.
Sebaliknya bila kondisi logika dari In1 dan In2 dibalik, maka Q1 tidak aktif
sedangkan Q2 aktif motor akan mendapat polaritas tegangan yang terbalik pula.
Kendali arah putar motor DC ditunjukkan dalam tabel 3.2. Kemudian untuk
Tabel 3.2 Arah putar motor DC
In 1 In 2 Arah Putaran
0 0 Mati
1 0 CW
0 1 CCW
1 1 Mati
Pada perancanganmenggunakan relay 12 V dengan R relay = 400 Ω (hasil pengukuran), Transistor NPN BD 139 (β = 110) maka IB dapat diketahui.
( )
Rrelay V sat CC C = Ι( )
Ω = 400 12V sat IC( )
=0.03 ΙC sat ABesar IB dapat ditentukan sebagai berikut :
β ) (sat I I C B = 110 03 . 0 A
IB =
A Ib=2.727.10−4
Selanjutnya mencari , dengan asumsi bahwa keluaran dari IC TTL ( ) pada
saat logika tinggi sekitar . Besar nilai dapat ditentukan sebagai berikut :
B
R VBB
V
5
B BE BB B I V V
R = −
A V V RB 4 10 . 727 , 2 7 , 0 5 − − = Ω =15768 B R
Karena nilai resistor yang dibutuhkan tidak ada di pasaran maka digunakan nilai
sebesar 15 KΩ.
B
R
3.2.2 Sistem Manual
Sistem manual ini digunakan apabila pengendalian sistem secara otomatis
mati atau tidak berfungsi. Pada perancangan sistem manual ini digunakan untuk
menghidup matikan alarm dan mengontrol putaran motor ke arah kanan (CW)
dan mengembalikan ke arah kiri (CCW).
3.2.2.1 Sistem alarm
Untuk menghidup dan mematikan alarm secara manual digunakan saklar
on/off. Saklar manual untuk menghidup dan mematikan alarm terlihat pada
gambar 3. 13.
Saklar on/off
Modul Alarm
3.2.2.2 Sistem penggerak motor
Komponen yang digunakan untuk mengontrol putaran motor berupa
seperangkat rangkaian sakelar dan relay. Sistem manual untuk mengontrol
pergerakan kekiri atau kekanan satu motor rangkaian terlihat seperti gambar 3.14
ini
Gambar 3.14 Sistem manual untuk menggerakan motor
Apabila tombol push button 1 di tekan maka motor akan berputar searah jarum
jam (CW) dan akan dihentikan putarannya oleh limit switch. Sedangkan bila
tombol push button 2 di tekan maka motor akan berputar dengan jarum jam
BAB IV
HASIL PENGAMATAN DAN PEMBAHASAN
Pada bab ini akan dibahas tentang hasil akhir dari alat yang dibuat. Untuk
mengetahui apakah alat yang sudah jadi sesuai dengan rancangan awal. Untuk
mengetahui tegangan masukan dan tegangan keluaran digunakan alat ukur
multimeter digital, juga akan dibahas tentang cara kerja alat apakah sudah sesuai
dengan rancangan yang dibuat.
4.1. Pengamatan Cara Kerja Alat
Pertama kali alat dihidupkan lampu indikator tidak menyala, ini
menandakan bahwa belum ada kereta api yang lewat. Apabila kereta api datang
dari sebelah kiri maka sensor 1 akan mendeteksinya sehingga akan menghidupkan
lampu indikator. Selang beberapa saat sensor 2 akan terhalang sehingga akan
membunyikan alarm. Selama alarm berbunyi sensor 3 dan 4 akan mendeteksi
keberadaan kendaraan di sekitar palang pintu rel kereta api. Apabila masih ada
kendaraan maka palang pintu rel kereta api belum turun tetapai apabila tidak ada
kendaraan maka palang pintu langsung turun. Setelah melewati palang pintu rel
kereta api maka sensor 5 akan terhalang sehingga alarm akan mati dan palang
pintu akan terbuka. Untuk sensor 6, apabila terhalang maka digunakan untuk
mengetahui keberadaan kereta sudah lewat. Dan semua itu berlaku bila kereta api
4.2. Pengamatan Pada Sensor Fototransistor
Sensor ini menggunakan LED inframerah tipe QED 233 sebagai pemancar
dan fototransistor tipe UT6W95-AE-0125 (NPN) sebagai penerimanya.
Rangkaian sensor diletakkan disebelah kanan dan kiri rel kereta api.
Cara kerja dari sensor ini adalah mengkondisikan pada mikrokontroler
menjadi logika ‘1’. Pada saat fototransistor mendapat sinar dari LED inframerah
dalam artian tidak ada kereta api yang lewat maka fotoransistor akan aktif.
Sehingga masukan ke inverter DM 74LS14 akan berlogika rendah (0). Keluaran
dari inverter DM74LS14 yang pertama akan berlogika tinggi (1). Karena
menggunakan iverter DM74LS14 sebanyak 2 buah maka keluaran dari inverter ke
dua akan berlogika rendah (0). Keluaran dari inverter DM74LS14 akan
diumpankan pada kaki mikrokontroler.
Pada saat sinar inframerah terhalang oleh kereta api maka fototransistor
tidak aktif, sehingga keluaran dari sensor akan berlogika tinggi (1) dan keluaran
ini sebagai masukan pada inverter DM74LS14. Keluaran dari inverter
DM74LS14 pertama akan berlogika rendah (0) sedangkan keluaran dari inverter
DM74LS14 yang ke dua akan berlogika tinggi (1). Tegangan keluaran pada
Tabel 4.1. Tegangan keluaran sensor fototransistor
Vout dari fototransistor (V) Sensor
Tak terhalang Terhalang
1 0,14 4,54
2 0,01 3,56
3 0,21 4,57
4 0,13 3,65
5 0,12 4,55
6 0,22 3,78
Tabel 4.2 Tabel keluaran dari keluaran dari inverter DM74LS14
Vout dari inverter DM74LS14 (V) Sensor
Tak terhalang Terhalang
1 0,32 4,6
2 0,5 4,39
3 0,38 4,4
4 0,46 4,38
5 0,5 4,39
6 0,188 4,6
Pada tabel 4.1 keluaran dari sensor fototransistor akan digunakan sebagai
masukan pada inverter DM74LS14. Kemudian keluaran dari inverter DM74LS14
dalam artian tidak ada kereta yang lewat tegangan keluaran inverter DM74LS14
sebesar 0,3913 (di ambil nilai rata-ratanya) maka pada masukan mikrokontroler
akan dianggap sebagai logika rendah ”0”, sedangkan pada saat kondisi sensor
terhalang obyek dalam artian ada kereta api yang lewat, tegangan keluaran
inverter DM74LS14 sebesar 4,46 (di ambil rata-rata) mikrokontroler sebagai
logika tinggi ‘1’. Tegangan keluaran pada perancangan yang diinginkan adalah
5V sedangkan pada pengukuran alat tegangan keluarannya sebesar 4,46 V. Tetapi
dengan tegangan keluaran yang di hasilkan sebesar 4,46, itu masih bisa
memberikan masukan kepada mikrokontroler. Perbedaan tegangan keluaran ini
dikarenakan nilai tahanan yang digunakan pada perancangan tidak sama dengan
nilai tahanan yang digunakan pada pembuatan alat.
4.3. Pengamatan Penggerak
Relay
pada Alarm
Transistor yang digunakan pada alat ini yaitu tipe BD 139, yang berfungsi
untuk menggerakkan relay. Transistor akan aktif atau berlogika ‘1’ jika
mendapatkan tegangan input dari mikrokontroler sehingga akan menggerakkan
relay, kemudian alarm akan berbunyi namun jika tidak mendapatkan tegangan
input atau berlogika ‘0’ maka transistor akan tidak aktif sehingga alarm tidak
berbunyi. Tabel 4.3 di bawah ini merupakan tabel keadaan penggerak relay pada
Tabel 4.3 Keadaan pada rangkaian penggerak penggerak alarm
Transisitor Relay Alarm
Aktif Aktif Bunyi
Tidak aktif Tidak aktif Mati
Dari tabel 4.3 dapat dilihat bahwa pada saat alat dijalankan, dimana
terdapat dua keadaan yakni alarm bunyi dan mati. Jadi bisa di katakan bahwa bila
transistor aktif maka relay akan aktif untuk selanjutnya akan menghidupkan alarm
dan ini berlaku untuk sebaliknya.
4.4. Pengamatan Penggerak
Relay
pada Motor
Pengamatan penggerak relay pada motor pada prinsipnya sama dengan
pengerak relay pada alarm. Tabel 4.4 merupakan tabel keadaan pada rangkaian
penggerak relay pada motor.
Tabel 4.4 Keadaan pada rangkaian penggerak motor
Tegangan
Masukan
Relay Transistor Motor
DC
Tr1(V) Tr2(V) Relay1 Relay2 Tr1 Tr2 M1 M2
Kondisi
Palang Pintu
5 0 Aktif - Aktif - CW CW Tertutup
Transisitor yang di gunakan sama dengan penggerak relay alarm. Pada saat
Tr1 diberi masukan logika ‘1’ (5 Volt) Tr1 aktif dan Tr2 di beri masukan logika
‘0’ (0 Volt) Tr2 tidak aktif. Maka relay1 pada Tr1 akan aktif dan relay2 pada Tr2
tidak aktif sehingga motor DC1 akan berputar searah jarum jam (CW) dan palang
pintu akan tertutup, sedangkan motor DC2 akan berputar berlawanan dengan
jarum jam (CCW) dan palang pintu akan tertutup. Pada saat Tr1 di beri masukan
logika 0 (0 Volt) Tr1 tidak aktif dan Tr2 di beri masukan logika ‘1’ (5 Volt) Tr2
aktif maka relay pada Tr1 tidak aktif dan relay pada Tr2 akan aktif mengakibatkan
motor DC1 akan bergerak berlawanan jarum jam (CCW) dan palang pintu akan
terbuka, sedangkan motor DC2 akan bergerak searah jarum jam (CW) dan palang
pintu akan terbuka. Motor DC ini dipasang secara paralel tetapi letaknya
berlawanan arah.
4.5 Pengamatam Keadaan Pada
Limit Switch
Pengamatan pada limih switch prinsipnya sama dengan saklar push button.
Limit switch disini digunakan untuk menghentikan putaran motor DC. Pada saat
motor DC berputar searah jarum jam (CW), posisi limith switch tertutup penuh (1)
yang berada di bawah dalam keadaan NO (normally open). Sehingga palang pintu
akan turun menyentuh limith switch dan akan menghentikan putaran motor,
karena pada saat palang pintu menyentuh limith switch merubah keadaan dari NO
(normally open) menjadi NC (normally close). Pada saat motor DC berputar
berlawanan dengan arah jarum (CCW), posisi limith switch terbuka penuh (2)
akan naik menyentuh limith switch dan akan menghentikan putaran motor, karena
pada saat palang pintu menyentuh limith switch merubah keadaan dari NO
(normally open) menjadi NC (normally close). Tabel 4.5 merupakan table
keadaan pada limith switch.
Tabel 4.5 Keadaan pada limith switch
Limith switch
Tertutup Penuh (1) Terbuka Penuh (2)
Putaram
Motor
Tak Tersentuh Tersentuh Tak tersentuh Tersentuh
CW NC NO - -
CCW - - NC NO
4.6 Pengamatan Kecepatan Pada Putaran Motor DC
Pengamatan pada putaran motor DC ini mengunakan tachometer. Dari
hasil pengamatan terhadap kecepatan putaran motor DC ditunjukkan pada tabel
4.6.
Tebel 4.6 Kecepatan putaran motor DC
Arah putaran Motor
CW (Rpm) CCW (Rpm)
M1 2426,6 5723,5
Dari hasil pengamatan tegangan yang digunakan untuk menggerakkan
motor DC sebesar 11,7. Dari tabel 4.6, kecepatan putaran motor1 saat CW sebesar
2426,6 Rpm dan kecepatan motor2 saat CW sebesar 2469,3 Rpm. Sedangkan
kecepatan putaran motor1 saat CCW sebesar 5723,5 Rpm dan kecepatan motor2
saat CCW sebesar 5785,4 Rpm.
Dengan kecepatan yang dimiliki oleh motor1, saat motor berputar CW yang
memiliki kecepatan sebesar 2426,6, dengan di pasang palang pintu kereta api
sehingga dapat menyentuh limith switch, merubah kondisi keadaan dari NO
(normally open) menjadi NC (normally close) mengakibatkan putaran motor
berhenti. Kemudian pada saat motor1 berputar CCW yang memiliki kecepatan
5723,5, dengan dipasang palang pintu kereta api sehingga dapat menyentuh limith
switch, merubah kondisi keadaan dari NO (normally open) menjadi NC (normally
close) mengakibatkan putaran motor berhenti.
Data diperoleh dari motor1 dan motor2 harusnya sama. Berdasarkan data
yang dilakukan terdapat perbedaan, yang disebabkan antaran lain hambatan dalam
BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Dari hasil pembuatan alat dan laporan tugas akhir ‘Pengendalian Palang
Pntu Rel Kereta Api Secara Otomatis Untuk Menunjang Sistem Prioritas Lampu
Lalu Lintas’ yang telah diuraikan pada bab sebelumnya maka penulis dapat
menarik kesimpulan, sebagai berikut:
1. Tegangan keluaran alat yang di buat sudah dapat memenuhi tegangan
logika 0 dan 1 yang akan di olah oleh mikrokontroler.
2. Secara keseluruhan alat sudah dapat di aplikasikan tetapi masih
memiliki kekurangan dan tidak sesuai yang di harapkan.
5.2. Saran
1. Agar sensor dapat bekerja dengan baik, lebih baik gunakan nilai tahanan
yang sama dengan nilai tahanan pada saat perancangan.
2. Menggunakan pengaturan kecepatan pada motor sehingga dapat di atur
DAFTAR PUSTAKA
1. WWW. Datasheetcatalog.com, Tanggal 12 Juli 2006
2. WWW. Jameco.com, Tanggal 12 Juli 2006
3. Pallas Areny, Ramon, 2001, Sensor and Signal Conditioning Second
Edition. Canada: John Wiley & Sons.
4. Purkait, N N, 1989, Dasar Elektronika, penerbit Universitas Indonesia
5. Sonny Bittikala, Stevanus, 2004, Pengendalian Model Palang Pintu
Perlintasan Kereta Api menggunakan Mikrokontroler A T89C51.
Rangkaian sensor pendeteksi kereta api
Rangkaian sensor pendeteksi arah datangnya kereta api
BD 139
330 Ohm Modul
Alarm
Dari Mikrokontroler
Vcc 5 V
RELAY 6 V
3 5 4 1 2
Rangkain saklar pemilih alarm
RELAY Micro1
3 5 4 1 2 BD 139 A -+ MOTOR DC1 1 2 DIODE
Vcc 12 V RELAY 12 V
3 4 5 6 8 7 1 2 DIODE Limit Switch2 3 2 Q2 15 K In 1 BD 139 A + -MOTOR DC2 2 1 15 K In 2
RELAY 12 V
3 4 5 6 8 7 1 2
RELAY Micro2
3 5 4 1 2 Q1 Limit Switch1 3 2