BAB 2
DASAR TEORI
2.1 Motor stepper
Motor stepper adalah suatu alat penggerak yang memanfaatkan gaya tarik magnet. Rotornya berhenti pada posisi kutub yang dieksitasi oleh arus yang mengalir pada lilitan. Rotor pada motor biasanya berputar secara kontinyu jika motor dieksitasi, tetapi rotor pada motor stepper berubah dari posisi diam dengan mengubah eksitasi kutub.
Arus yang mengalir pada setiap lilitan hanya sesaat sehingga bentuk arusnya berupa pulsa. Rotor berputar karena pulsa yang bergantian. Kecepatan putaran rotor ditentukan oleh kecepatan perpindahan pulsa dan sudut putaran sebanding dengan banyaknya pulsa yang diberikan. Apabila satu pulsa input menghasilkan perputaran sejauh 1,8 derajat, sehingga 20 pulsa akan menghasilkan perputaran penuh sebesar 36 derajat dan untuk mendapatkan satu putaran penuh 360 derajat dibutuhkan 200 pulsa.
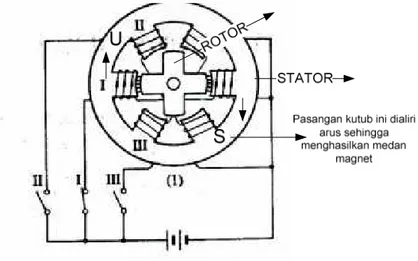
Rotor yang digunakan terbuat dari baja lunak dan memiliki sejumlah gigi yang jumlahnya kurang dari jumlah kutub pada stator. Stator memiliki beberapa pasang kutub dimana setiap pasang kutub diaktifkan melalui prinsip elektromagnetik oleh arus yang
sepasang kutub dalam keadaan aktif sehingga akan timbul medan magnet yang kemudian menarik pasangan gigi rotor terdekat, sehingga gigi akan bergerak ke posisi segaris dengan kutub.
Untuk menggerakkan sebuah motor stepper setiap pasang kumparan stator harus disambungkan dengan aliran listrik dan diputuskan secara bergantian dalam urutan yang benar. Dengan demikian, input ke motor berupa deretan pulsa yang menghasilkan output ke setiap pasang kumparan stator.
Sistem penggerak yang biasa digunakan terdiri dari dua blok utama yaitu pengatur urutan logika dimana menerima pulsa – pulsa input dan menghasilkan pulsa – pulsa output dalam urutan sebagai mana yang dibutuhkan untuk mengontrol penggerak agar menghasilkan pulsa output dengan amplitudo yang sesuai.
Motor langkah (stepper) banyak digunakan dalam berbagai aplikasi, dipergunakan apabila dikehendaki jumlah putaran yang tepat atau diperlukan sebagian dari putaran motor.
Aplikasi penggunaan motor langkah dapat juga dijumpai dalam bidang industri atau untuk jenis motor langkah kecil dapat di gunakan dalam perancangan suatu alat mekatronik atau robot. Pada gambar 2.1 berikut ditunjukkan dasar susunan sebuah motor langkah (stepper).
Gambar 2.1 Diagram motor langkah (stepper)
Magnet permanen berputar kearah medan magnet yang aktif. Apabila kumparan stator dialiri arus sedemikian rupa, sehingga akan timbul medan magnet dan rotor akan berputar mengikuti medan magnet tersebut. Setiap pengalihan arus ke kumparan berikutnya menyebabkan medan magnet berputar menurut suatu sudut tertentu, biasanya informasi besar sudut putar tertulis pada badan motor langkah yang bersangkutan. Jumlah keseluruhan pengalihan menentukan sudut perputaran motor. Jika pengalihan arus di tentukan, sehingga rotor akan berhenti pada posisi terakhir. Jika kecepatan pengalihan tidak terlalu tinggi, sehingga slip akan dapat dihindari. Memerlukan umpan balik (feedback) pada pengendalian motor langkah.
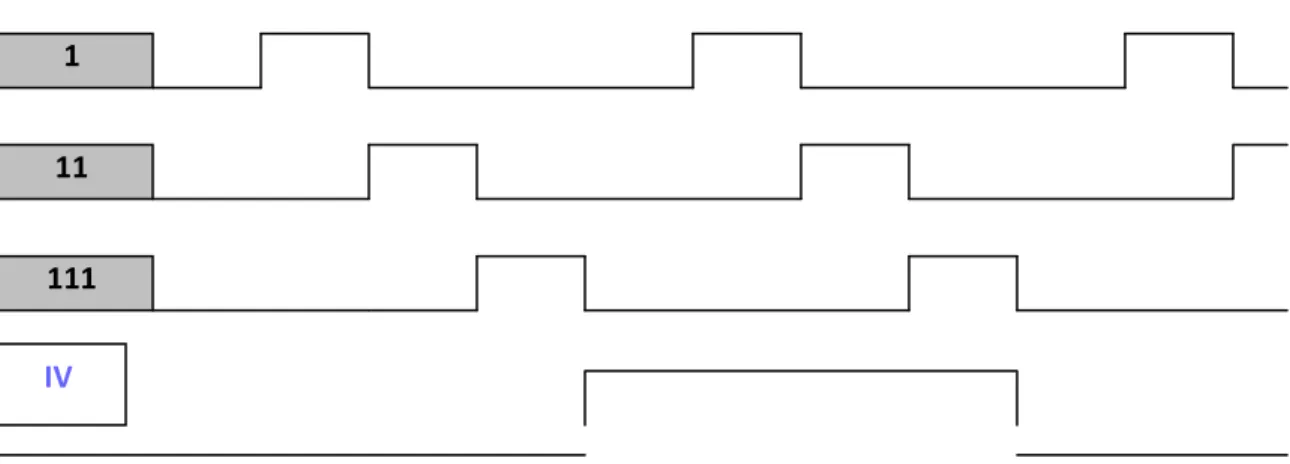
Motor langkah yang akan di gunakan memiliki 4 fasa (pole atau kutub), pengiriman pulsa dari mikrokontroler ke rangkaian motor langkah dilakukan secara bergantian, masing-masing 3 data (sesuai dengan jumlah fasa-nya), sebagian di tunjukkan pada gambar 2.2 berikut.
Gambar 2.2 Pemberian data/pulsa pada motor stepper
Pada saat yang sama, untuk tiap motor langkah, tidak boleh ada 2 (dua) masukan atau lebih yang mengandung pulsa sama dengan 1 (high), atau dengan kata lain, pada suatu saat hanya sebuah masukan yang bernilai 1 (satu) sedangkan lainnya bernilai 0 (nol).
Sistem penggerak yang biasa digunakan terdiri dari dua blok utama yaitu pengaturan urutan logika dan sebuah penggerak ditunjukkan pada gambar 2.3.
Gambar 2.3 Sistem Penggerak Motor stepper
Pengatur urutan logika menerima pulsa – pulsa input dan menghasilkan pulsa output dalam urutan sebagaimana yang dibutuhkan untuk mengontrol penggerak agar menghasilkan pulsa output dengan amplitude yang sesuai.
111 1
11
2.2 Driver Motor stepper
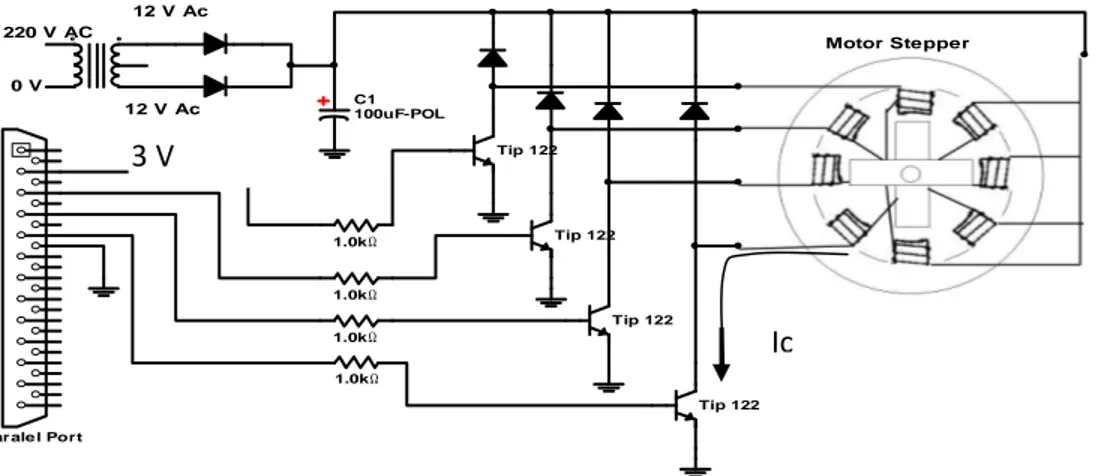
Motor stepper yang digunakan adalah motor stepper unipolar. Motor stepper ini bekerja pada tegangan 12 - 15 volt. Pada perancangan ini motor stepper akan dikendalikan oleh port parallel pada PC, dimana output daru paralel port adalah 3,5 - 5 volt, sehingga dibutuhkan sebuah driver sebagai perantara antara paralel port dan motor stepper. Rangkaian perantara ini biasa disebut dengan driver motor stepper. Rangkaian driver motor stepper ini menggunakan prinsip transistor sebagai saklar. Rangkaiannya ditunjukkan pada gambar 2.4 sebagai berikut :
Gambar 2.4. Rangkaian driver motor stepper
Rangkaian ini menggunakan trafo stepdown dari 220 volt ke 12 volt. Output dari trafo disearahkan dengan 2 buah dioda, kemudian diratakan dengan elco 100 mikro Farad. Keluaran dari Elco dihubungkan ke input positif dari motor stepper.
Tip 122 Tip 122 1.0kΩ 1.0kΩ 1.0kΩ 1.0kΩ 220 V AC 0 V C1 100uF-POL Parale l Port 12 V Ac 12 V Ac Tip 122 Tip 122 Vcc 12 Volt Motor Stepper 3 V Ic
2. 3 Transistor sebagai Saklar (Switching)
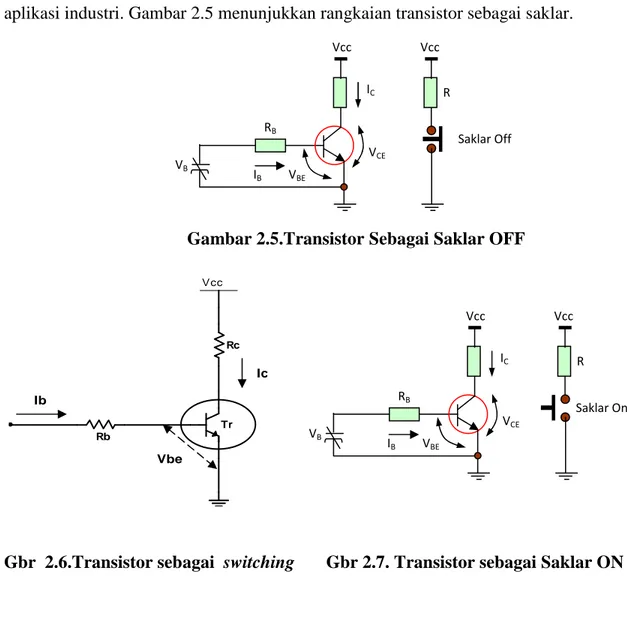
Disamping sebagai penguat, transistor juga sering digunakan sebagai saklar untuk mengontrol suatu beban dengan arus kecil, medium, atau arus besar dalam aplikasi – aplikasi industri. Gambar 2.5 menunjukkan rangkaian transistor sebagai saklar.
Gambar 2.5.Transistor Sebagai Saklar OFF
Gbr 2.6.Transistor sebagai switching Gbr 2.7. Transistor sebagai Saklar ON
Pada penggunaan transistor sebagai switching tegangan nol volt pada Vbe transistor jenis NPN berarti mengaktifkan transistor tersebut sebagai saklar dengan keadaan terbuka, sedangkan memberi tegangan ≥ 0,7 volt untuk transistor silikon dan ≥ 0,3 volt untuk transistor germanium pada Vbe transistor akan memfungsikan transistor itu sebagai saklar dengan keadaan tertutup. Sedangkan pada transistor jenis PNP tegangan
Vcc Rb Tr Rc Ic Ib Vbe Saklar On Vcc Vcc IC R RB VB IB VBE VCE Saklar Off Vcc Vcc IC R RB VB IB VBE VCE
nol justru akan membuat transistor tersebut bekerja sebagai saklar dalam keadaan tertutup. Pada keadaan transistor sebagai saklar tertutup sehingga arus Ic dari transistor itu akan mengalir melalui Rc menuju ground, sedangkan pada keadaan transistor sebagai saklar terbuka sehingga arus Ic akan tertahan sampai Rc saja.
Didalam pesehinggaiannya transistor dipakai sebagai komponen saklar (switching) dengan memanfaatkan daerah penjenuhan (saturasi) dan daerah penyumbatan (cut off) yang ada pada karakteristik transistor.
Pada daerah penjenuhan nilai resistansi persambungan kolektor emiter secara ideal sama dengan nol atau kolektor dan emiter terhubung langsung (short). Keadaan ini menyebabkan tegangan kolektor emiter (VCE) = 0 Volt pada keadaan ideal, tetapi pada
kenyataannya VCE bernilai 0 sampai 0,3 Volt.
Saturasi pada transistor terjadi apabila arus pada kolektor menjadi maksimum dan untuk mencari besar arus basis agar transistor saturi adalah :
Rc Vcc Imax= ………..……….(2.1) Rc Vcc I . hfe B = ……….……….(2.2) Rc . hfe Vcc IB= ……….(2.3)
Hubungan antara tegangan basis (VB) dan arus basis (IB) adalah :
B BE B B R V V I = − ……….(2.4) VB = IB . RB + VBE………..(2.5)
BE B B V Rc . hfe R . Vcc V = + ………(2.5)
Jika tegangan VB telah mencapai BE B B V Rc . hfe R . Vcc
V = + , sehingga transistor akan
saturasi, dengan Ic mencapai maksimum.
2.4 Port Komputer
Komputer merupakan alat atau mesin penghitung elektronik yang cepat menerima input
digital, memprosesnya berdasarkan daftar instruksi internal yang tersimpan dan
menghasilkan nilai perhitungan dalam informasi output. Daftar instruksi dinasehinggan
program komputer dan penyimpanan internal dinasehinggan memori komputer.
Dalam bentuk yang paling sederhana komputer terdiri dari 5 bagian fungsional
yang independent, yaitu : input, memori, aritmatik dan logika, output dan kontrol unit.
Unit input menerima informasi yang dikodekan dari operator manusia, peralatan
elektromagnetik seperti keyboard ke display atau dari komputer yang lain dengan menggunakan line komunikasi digital. Informasi yang diterima disimpan dalam memori
untuk selanjutnya dipakai sebagai referensi atau digunakan segera oleh rangkaian
aritmatika dan logika untuk menjalankan operasi yang diinginkan .Langkah - langkah
untuk memproses suatu informsi tergantung program yang tersimpan di dalam memori.
Dan pada akhirnya hasil dari proses akan dikirim keluar melalui output unit. Seluruh dari
2.5 Input / Output Unit
Input / output unit merupakan bagian dari komputer untuk menerima data maupun
mengeluarkan / menampilkan data setelah diproses oleh prosessor. Port I/O adlah port atau gerbang atau tempat dipasangnya konektor dari peralatan I/O. Dimana setiap port I/O
dibawah kontrol dari prosesor.
2.5.1 Port Paralel PC
Port pararel digunakan pada aplikasi antarmuka, port ini memperoleh masukan hingga 8
bit dan keluaran hingga 12 bit pada saat bersamaan dengan hanya membutuhkan
rangkaian eksternal sederhana untuk melakukan intruksi tertentu. Port ini terdiri dari 4 jalur kontrol, 5 jalur status dan 8 jalur data. Hampir semua port pararel yang diimplementasikan mampu memberikan arus sekitar 12mA.
Terjadinya transisi dari logika 1 ke 0 pada ACK akan membangkitkan interupsi
perangkat keras port pararel IRQ 7. Pada jalur busy ( dan yang sejenis dengan tanda negasi ), jika sinyal logika 1 diterapkan pada pin ini dan kemudian register status dibaca, sehingga akan terbaca (pada bit 7) sebagai 0 bukan 1. Komputer XT/AT buatan IBM atau
yang kompetibel pada umumnya menggunakan dua jenis port untuk komunikasi antara
komputer dengan dunia luar, port tersebut adalah port parallel dan port serial.
Berikut adalah gambar 2.8 konektor port parallel DB-25 yang banyak digunakan
Gambar 2.8 Port Paralel DB 25
Pada komputer tertentu kadangkala port paralelnya berupa konektor centronix, namun fungsinya tetap sama hanya berbeda bentuk. Port Paralel centronix ditunjukkan pada gambar 2.9.
Gambar 2.9.Port Paralel Centronix
Dibawah ini adalah table 2.1 tentang konfigurasi pin dan nama sinyal konektornya
parallel standart DB-25 serta fungsi – fungsi dari ke dua puluh lima pin tersebut
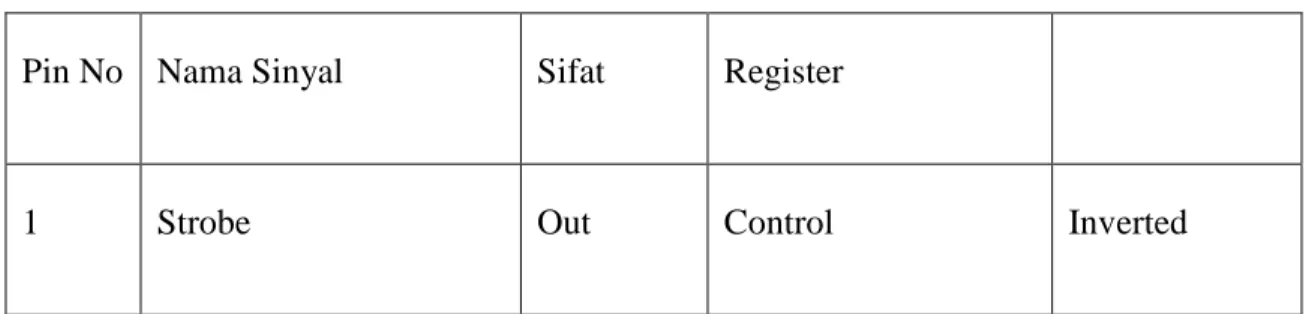
Tabel 2.1 Fungsi - Fungsi PIN Port Paralel
Pin No Nama Sinyal Sifat Register
2 Data 0 In/Out Data Ya
3 Data 1 In/Out Data
4 Data 2 In/Out Data
5 Data 3 In/Out Data
6 Data 4 In/Out Data
7 Data 5 In/Out Data
8 Data 6 In/Out Data
9 Data 7 In/Out Data
10 Acknowledge In Status
11 Busy In Status Ya
12 Peper Out In Status
14 Auto Line Feed Out Control Ya
15 Error In Status
16 Initialize Out Control
17 Select In Out Control Ya
18-25 Ground Gnd
Untuk dapat menggunakan port paralel, kita harus mengetahui alamatnya. Base Address LPT1 (local Printer terminal 1) biasanya adalah 888 desimal (378h) (888 desimal atau 378 heksadesimal adalah alamat port parallel pada komputer) dan LPT2 biasanya
632 desimal (278h). Alamat tersebut adalah alamat yang umumnya digunakan, tergantung
dari jenis komputer. Tepatnya kita bisa melihat pada peta memori tempat menyimpan
alamat tersebut, yaitu memori 000.0408h untuk base address LPT1 dan memori 0000.040h untuk base address LPT2.
Setelah kita mengetahui alamat port parallel, sehingga kita dapat menentukan
alamat Data Port (CP), dan Status Port (SP). Alamat DP adalah base address dari port parallel tersebut, alamat SP adalah base address +1, dan alamat CP adalah base address
+2. Base Address +1 adalah alamat untuk status port dan Base Address +2 adalah alamat untuk control port.
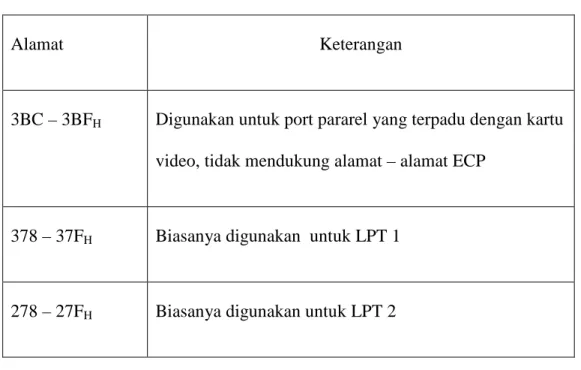
Tabel 2.2 berikut adalah tabel alamat masing – masing port yang umumnya
digunakan yaitu :
Tabel 2.2. Alamat Pada Port-Port Paralel
Alamat Keterangan
3BC – 3BFH Digunakan untuk port pararel yang terpadu dengan kartu
video, tidak mendukung alamat – alamat ECP
378 – 37FH Biasanya digunakan untuk LPT 1
278 – 27FH Biasanya digunakan untuk LPT 2
2.5.2 Register Port Paralel
Terdapat tiga jenis register pada port pararel yang umum digunakan, yaitu:
1. Register Data Port Pararel
2. Register Port Status
3. Register Port Kontrol
sebagai port baca tulis, untuk membaca dari port ini sehingga yang terbaca adalah byte
terakhir yang dikirim.
Register Port status berasal dari lima masukan port pararel (Pin 10,11,12,13 dan
15). Sebuah register status IRQ dan dua bit tercabang. Perlu diingat bahwa bit 7 (busy)
sebagai masukan aktif rendah. Jika bit 7 terbaca sebagai logika 0 artinya pada pin tersebut
terpasang tegangan 5 V. Juga pada bit 2 IRQ, jika bit ini terbaca 1 artinya interupsi ( selah
) tidak muncul.
Register Port kontrol sebagai register tulis saja. Saat sebuah pencetak
disambungkan pada port pararel, sehingga ia membutuhkan 4 kontrol yaitu strobe, auto
linefeed, Initialize, dan select printer, yang semua sifatnya Inverted kecuali Initialize.
Ketika port pada port pararel, yaitu port data, port status, dan port kontrol,
memiliki register prangkat lunak dan masing masing berukuran 8 bit. Susunan bit-bit
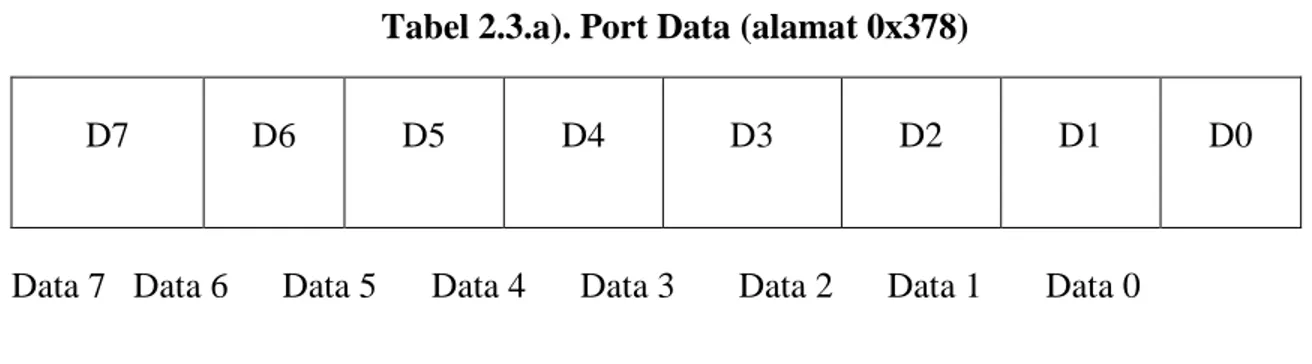
pada register port pararel untuk masing masing port dapat dilihat pada tabel2.3.
Tabel 2.3. Register Pada Port Pararel Tabel 2.3.a). Port Data (alamat 0x378)
D7 D6 D5 D4 D3 D2 D1 D0
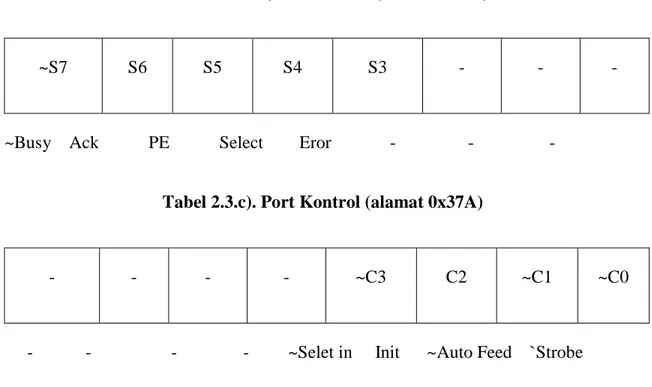
Tabel 2.3.b). Port Status (alamat 0x379)
~S7 S6 S5 S4 S3 - - -
~Busy Ack PE Select Eror - - -
Tabel 2.3.c). Port Kontrol (alamat 0x37A)
- - - - ~C3 C2 ~C1 ~C0
- - - - ~Selet in Init ~Auto Feed `Strobe
Keterangan : Tanda ~ didepan nama sinyal atau bit berarti bahwa sinyal atau bit yang
bersangkutan aktif rendah.
Semua keluaran pada register port data berlogika sebenarnya yaitu , menuliskan logika 1
ke salah satu bit pada data port menyebabkan logika 1 pada bit yang bersangkutan.
Namun demikian, keluaran - keluaran/SELECT_IN, /AUTO FEED, dan /STROBE pada
Control Port berlogika inversi (kebalikan). Artinya, penulisan logika 1 ke salah satu bit
pada Control Port menyebabkan logika 0 pada bit yang bersangkutan
Untuk bit bit yang menggunakan logika inversi, hal ini harus diperhatikan agar tidak
mengacaukan maksudnya. Untuk itu, bit yang akan dikirimkan tersebut dapat dibalik
2.6 Bahasa Pemograman Visual Basic.
Visual Basic merupakan bahasa pemograman yang cukup populer dan mudah untuk
dipelajari. Visual Basic juga menyediakan fasilitas yang memungkinkan pesehinggai
menyusun sebuah program dengan memasang objek-objek grafis dalam sebuah grafis
dalam sebuah form.
Visual Basic berawal dari bahasa pemograman BASIC (Beginners All Purpose Symbolic Instruction Code). Karena bahasa basic mudah dipelajari dan populer sehingga hampir setiap programmer menguasai bahasa ini.
2.6.1. Memulai Visual Basic
Pada bagian ini akan dijelaskan bagaimana cara menjalankan Visual Basic pada sistem
operasi windows. Cara pertama yang dapat dilakukan untuk memulai Microsoft Visual
Basic adalah:
a. Klik tombol start pada Taskbar, kemudian pilih program dari tampilan menu utama.
b. Dari tampilan menu yang ada, pilih Visual Basic.
2.6.2 Tampilan Awal Visual Basic
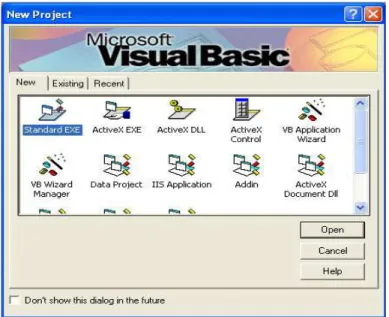
Secara otomatis, pada saat pertama kali menjalankan Visual Basic akan tampil kotak
Gambar 2.10 Tampilan awal Visual Basic
Pada kotak dialog tersebut terdapat tiga pilihan tabulasi yang ditunjukkan pada
gambar 2.10.
Tabel 2.4. Keterangan Tabulasi
Tabulasi Keterangan
New Pilihan ini digunakan untuk membuat project baru dengan berbagai
macam pilihan
Existing Pilihan ini digunakan untuk membuka project yang pernah dibuat
sebelumnya dengan menetukan folder sekaligus nama file.
Recent Pilihan ini digunakan untuk membuka project yang telah dibuat dan
terakhir kali dibuka.
Gambar 2.11 Tampilan dasar MS-Visual Basic
2.7. Mikrokontroler AT89S51 2.7.1 Gambaran umum
Mikrokontroler AT89S51 adalah mikrokomputer CMOS 8 bit yang memiliki 8 KB
Programmable and Erasable Read Only Memory (PEROM). Mikrokontroler berteknologi memori non-volatile (tidak kehilangan data bila kehilangan daya listrik). Set instruksi dan kaki keluaran AT89S51 sesuai dengan standar industri 80C51 dan 80C52. Atmel AT89S51 adalah mikrokontroler yang sangat bagus dan fleksibel dengan harga yang rendah untuk banyak aplikasi sistem kendali. berkerapatan tinggi dari Atmel ini sangat
kompatibel dengan mikrokontroler MCS-51 misalnya mikrokontroler 8031 yang terkenal
dan banyak digunakan dan telah menjadi standar industri baik dalam jumlah pin IC
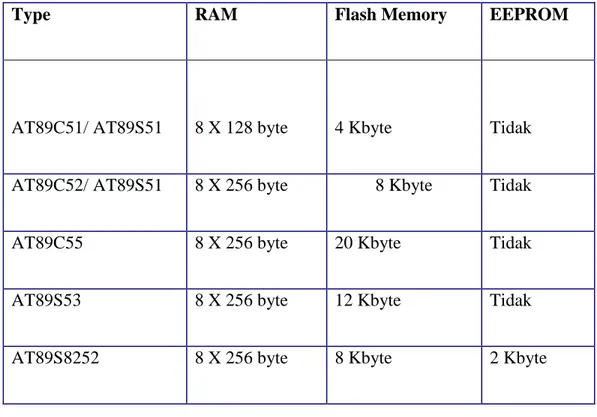
Tabel 2.5 Kapasitas Memori Mikrokontroler seri AT89X
Mikrokontroler AT89S51 memiliki fasilitas-fasilitas pendukung yang
membuatnya menjadi mikrokontroler yang sangat banyak digunakan dalam berbagai
aplikasi. Fasilitas-fasilitas yang dimiliki oleh mikrokontroler AT89S51 adalah :
a) Sesuai dengan produk-produk MCS-51.
b) Terdapat memori flash yang terintegrasi dalam sistem. Dapat ditulis ulang hingga 1000 kali.
c) Beroperasi pada frekuensi 0 sampai 24MHz.
d) Tiga tingkat kunci memori program. e) Memiliki 256 x 8 bit RAM internal.
Type RAM Flash Memory EEPROM
AT89C51/ AT89S51 8 X 128 byte 4 Kbyte Tidak
AT89C52/ AT89S51 8 X 256 byte 8 Kbyte Tidak
AT89C55 8 X 256 byte 20 Kbyte Tidak
AT89S53 8 X 256 byte 12 Kbyte Tidak
g) Tiga pewaktu/pencacah 6-bit (untuk AT89S51) & dua pewaktu/pencacah 16-bit (untuk AT89S51)
h) Memiliki 8 sumber interupsi (untuk AT89S51) & 6 untuk AT89S51 i) Kanal serial terprogram.
j) Mode daya rendah dan mode daya mati.
2.7.2 Fungsi Pin-Pin pada mikrokontroler AT89S51
AT89S51 memiliki 40 buah kaki (pin) yang terintegrasi dalam 1 chip. Adapun fungsi dari pin-pin tersebut adalah sebagai berikut :
1. Pin 1 sampai pin 8
Pin 1 – 8 adalah port 1 yang merupakan saluran atau bus I/O 8 bit dua arah dengan internal pull-up yang dapat digunakan untuk berbagai keperluan seperti mengendalikan empat input TTL. Port ini juga digunakan sebagai saluran alamat saat
pemrograman dan verifikasi.
2. Pin 9
Merupakan masukan reset (aktif tinggi). Pulsa transisi dari rendah ke tinggi akan
me-reset mikrokontroler ini.
3. Pin 10 sampai pin 17
Pin 10 – pin 17 merupakan saluran atau bus I/O 8 bit dua arah dengan internal pull-ups yang memiliki fungsi pengganti. Bila fungsi pengganti tidak dipakai sehingga dapat digunakan sebagai port paralel 8 bit serbaguna. Selain itu, sebagian port 3 dapat
4. Pin 18 dan pin 19
Pin-pin ini merupakan jalur masukan ke penguat osilator berpenguat tinggi.
Mikrokontroler ini memiliki seluruh rangkaian osilator yang diperlukan pada chip, kecuali rangkaian kristal yang mengendalikan frekuensi osilator. Oleh karena itu, pin
18 dan 19 ini sangat diperlukan untuk dihubungkan dengan kristal. Selain itu XTAL
1 juga dapat digunakan sebagai input untuk inverting osilator amplifier dan input rangkaian internal clock, sedangkan XTAL 2 merupakan output dari inverting oscillator amplifier.
5. Pin 20
Pin 20 merupakan ground sumber tegangan dan diberi simbol gnd.
6. Pin 21 sampai pin 28
Pin-pin ini adalah port 2 yang merupakan saluran atau bus I/O 8 bit dua arah dengan
internal pull-ups. Saat pengambilan data dari program memori eksternal atau selama pengaksesan data memori eksternal yang menggunakan alamat 16 bit
(MOVX@DPTR), port 2 berfungsi sebagai saluran /bus alamat tinggi (A8-A15).
Akan tetapi, saat mengakses data memori eksternal yang menggunakan alamat 8 bit
(MOVX@DPTR), port 2 mengeluarkan isi P2 pada special function register.
7. Pin 29
Pin 29 merupakan program Store Enable (PSEN) merupakan sinyal pengontrol untuk mengakses program memori eksternal agar masuk ke dalam bus selama proses
Pin 30 sebagai Adress Lacth Enable (ALE)/PROG merupakan penahan alamat memori eksternal (pada port 1) selama mengakses ke memori. Pin ini juga berfungsi
sebagai pulsa/sinyal input pemograman (PROG) selama proses pemograman.
9. Pin 31
Pin 31 adalah External Access Enable (EA) merupakan sinyal kontrol untuk pembacaan memori program. Apabila diset rendah (L) sehingga mikrokontroler akan
melaksanakan seluruh instruksi dari memori program eksternal, sedangkan jika diset
tinggi (H) sehingga mikrokontroler akan melaksanakan seluruh instruksi dari memori
program internal ketika isi program counter kurang dari 4096. Port ini juga berfungsi
sebagai tegangan pemograman (Vpp=+12V) selama proses pemograman.
10.Pin 32 sampai pin 39
Pin 32-pin 39 adalah port 0 yang merupakan saluran bus I/O 8 bit open collector, dapat juga digunakan sebagai multipleks bus alamat rendah dan bus data selama
adanya akses ke memori program eksternal. Saat proses pemograman dan verifikasi,
port 0 digunakan sebagai saluran/bus data. Pull-up eksternal diperlukan selama proses verifikasi.
11.Pin 40
Pin 40 merupakan sumber tegangan positif yang diberi simbol Vc
2.7.3 Karakteristik mikrokontroler AT89S51
AT89S51 mempunyai memori yang terdiri dari RAM internal dan Special Function Register. RAM internal pada mikrokontroler AT89S51 memiliki ukuran 256 byte dan beralamatkan 00H-7FH serta dapat di akses menggunakan RAM address register. RAM
internal terdiri dari delapan buah register (R0-R7) yang membentuk register banks.
Special Function Register yang berjumlah 21 buah berada di alamat 80H-FFH. RAM ini berbeda pada lokasi dengan Flash PEROM dengan alamat 000H-7FFH.
IC AT89S51 mempunyai pin sebanyak 40 buah yang sesuai dengan
mikrokontroler 8031 dan memiliki susunan pin seperti gambar berikut:
Gambar 2.12 Konfigurasi pin (kaki) pada mikrokontroler AT89S51.
2.8 Sensor Gerak
Sensor gerak merupakan sebagai pengambil data apabila ada orang yang melewati atau
memasuki ruangan. Sensor ini terdiri dari dua buah pemancar infra merah dan sebuah
potodioda. Sensor ini memanfaatkan pancaran sinar infra merah dari pemancar infra
merah yang diterima oleh potodioda. Fotodioda piranti semikonduktor dengan struktur
2.8.1 Fotodioda
Fotodioda biasanya digunakan untuk mendeteksi cahaya. Potodioda adalah piranti
semikonduktor yang mengandung sambungan p-n, dan biasanya terdapat lapisan intrinsik
antara lapisan n dan p. Piranti yang memiliki lapisan intrinsik disebut p-i-n atai PIN
potodioda. Cahaya diserap di daerah pengambungan atau daerah intrinsik menimbulkan
pasangan elektron-hole, kebanyakan pasangan tersebut menghasilkan arus yang berasal
dari cahaya. Potodioda dapat dioperasikan dalam 2 mode yang berbeda, yaitu:
1. Mode fotovoltaik: seperti solar sel, penyerapan pada potodioda menghasilkan
tegangan yang dapat diukur. Bagaimanapun, tegangan yang dihasilkan dari tenaga
cahaya ini sedikit tidak linier, dan range perubahannya sangat kecil.
2. mode fotokonduktivitas : disini, potodioda diaplikasikan sebagai tegangan revers
(tegangan balik) dari sebuah dioda (yaitu tegangan pada arah tersebut pada dioda
tidak akan menhantarkan tanpa terkena cahaya) dan pengukuran menghasilkan
arus poto. ( hal ini juga bagus untuk mengaplikasikan tegangan mendekati nol).
Ketergantungan arus poto pada kekuatan cahaya dapat sangat linier .
Selain itu fotodioda memiliki karakteristik tertentu berdasarkan bahan yang digunakan
untuk membuatnya. Adapun karakteristik bahan potodioda adalah sebagai berikut:
1. silikon (Si) : arus lemah saat gelap, kecepatan tinggi, sensitivitas yang bagus
antara 400 nm sampai 1000 nm ( terbaik antara 800 sampai 900 nm).
2. Germanium (Ge): arus tinggi saat gelap, kecepatan lambat, sensitivitas baik
3. Indium Gallium Arsenida (InGaAs): mahal, arus kecil saat gelap, kecepatan tinggi
sensitivitas baik pada jarak 800 sampai 1700nm (terbaik antara 1300 sampai
1600nm).
4. Gambar Photodioda ditunjukkan pada gambar berikut:
Gambar 2.13 Dioda Pemancar Cahaya Infra Merah (LED infra Merah)
2.8.2 LED (light emiting dioda)
LED adalah dioda yang menghasilkan cahaya saat diberi energi listrik. Dalam bias maju
sambungan p-n terdapat rekombinasi antara elektron bebas dan lubang (hole). Energi ini tidak seluruhnya diubah kedalam bentuk energi cahaya atau photon melainkan dalam
bentuk panas sebagian.
Proses pemancara cahaya akibat adanya energi listrik yang diberikan terhadap
suatu bahan disebut dengan sifat elektroluminesensi. Material lain misalnya Galium
Arsenida Pospat (GaAsP) atau Galium Pospat (GaP). Foton energi cahaya dipancarkan
Gambar 2.14 Simbol dan rangkaian dasar sebuah LED
Pemancar inframerah adalah dioda solid state yang terbuat dari bahan Galium Arsenida (GaAs) yang mampu memancarkan fluks cahaya ketika dioda ini dibias maju.
Bila diberi bias maju elektron dari daerah-n akan menutup lubang elektron yang ada didaerah-p. Selama proses rekombinasi ini, energi dipancar keluar dari permukaan p dan
n dalam bentuk foton. foton-foton yang dihasilkan ini ada yang diserap lagi dan ada yang meninggalkan permukaan dalam betuk radiasi energi.
330Ω 5V