BAB III
METODOLOGI PENELITIAN
A. Metode Penelitian
Metode yang akan digunakan dalam penelitian ini adalah metode deskriptif dan metode eksperimen sedangkan teknik yang digunakan adalah studi literatur. Melalui metode deskriptif penulis akan menguraikan permasalahan yang dibahas secara jelas. Sedangkan metode eksperimen dilakukan untuk merancang serta membuat kontrol nyala lampu, tirai, dan kipas angin menggunakan energi surya. Data yang akan diambil juga diperoleh melalui metode eksperimen. Data yang diambil diantaranya tegangan, arus, dan waktu saat pengisian dan pengosongan akumulator. Selain itu, diambil pula data intensitas cahaya yang digunakan untuk menentukan tegangan referensi pada rangkaian sensor, tegangan keluaran sensor cahaya, serta tegangan masukan dan keluaran mikrokontroler.
Sebelum melakukan perancangan, dilakukan studi literatur terhadap beberapa materi yang diperlukan, diantaranya proses konversi dari energi surya menjadi energi listrik, sistem penyimpanan berikut cara kerjanya, konsep perbandingan tegangan, LED, dan motor DC yang akan digunakan sebagai penggerak tirai serta kipas angin.
B. Waktu dan Tempat Penelitian
Penelitian direncanakan akan dilaksanakan pada : Waktu Pelaksanaan : April - September2013
Tempat Pelaksanaan : Laboratorium Bahan dan Komponen Mikroelektronika, Pusat Penelitian Elektronika dan Telekomunikasi-Lembaga Ilmu Pengetahuan Indonesia (PPET-LIPI), Jl. Cisitu 21/154D Komplek LIPI Sangkuriang Gd.20 - Bandung 40135 Telp. 2504660, 2504661 Fax. 022-2504659.
C. Alat dan Bahan 1. Hardware a. Modul surya b. Akumulator 6 V 4,5 Ah c. Resistor (220R, 2k2, 4k7, 10k, 18k, 20k, ) d. Resistor multiturn e. Kapasitor (22 pF, 100 pF, 10uF) f. Dioda (1N4148, 1N4001) g. Dioda zener 6,2V
h. Transistor (2N3904, 2N3906, MOSFET IRF9530N) i. LM317
j. Light Emitting Diode (LED) k. Light Dependent Resistors (LDR) l. ATmega 8535 m. Crystal n. Driver L293D o. Motor DC p. Push Buton q. Akrilik+lem akrilik r. Gergaji
s. Downloader DT-HiQ AVR USB ISP mkII 2. Software
a. CodevisionAVR Version 2. 04. 9 Evaluation b. Proteus 7 Profesional
D. Prosedur Penelitian
Prosedur penelitian ini dibagi menjadi beberapa tahap, yaitu tahap persiapan, tahap perancangan, dan tahap pembuatan. Tahap persiapan merupakan ide awal sistem yang diikuti dengan mencari literatur dari berbagai sumber. Tahap perancangan adalah merancang sistem secara keseluruhan yang kemudian akan
diaplikasikan pada tahap pembuatan. Tahapan-tahapan secara keseluruhan dapat digambarkan melalui diagram alir di bawah ini (gambar 3.1):
Gambar 3.1 Diagram Alir Penelitian
Adapun penjelasan dari masing-masing tahapan adalah sebagai berikut: 1. Tahap Persiapan
Secara garis besar, sistem otomatisasi lampu, tirai, dan kipas angin ini terdiri dari modul surya, charge controller, akumulator, sensor cahaya (LDR), komparator, mikrokontroler 8535, driver motor DC, LED, dan motor DC. Adapun diagram blok sistem secara keseluruhan ditunjukkan oleh gambar 3.2 :
Gambar 3.2 Diagram Blok Perangkat Keras (a) Sistem Catu Daya (b) Sistem
Otomatisasi
Modul surya akan menghasilkan tegangan ketika permukaannya terkena cahaya matahari. Tegangan yang dihasilkan akan disimpan di dalam akumulator. Proses pengisian dan pengosongan akumulator diatur oleh charge controller. Ketika akumulator digunakan oleh beban sampai tegangan akumulator berada pada nilai tertentu, maka dilakukan proses pengisian akumulator. Namun, proses pengisian ini hanya dapat dilakukan ketika terdapat cahaya (pada siang hari). Setelah kondisi pengisian tercapai maka charge controller akan menghentikan proses pengisian karena jika tidak akumulator bisa rusak.
Akumulator kemudian dihubungkan dengan beban yang terdiri dari rangkaian sensor dan rangkaian kontrol. Pada rangkaian sensor, sensor yang digunakan adalah LDR. LDR digunakan untuk mengukur intensitas cahaya. Setelah tegangan keluaran sensor dibandingkan dengan tegangan referensi, tegangan akan masuk ke mikrokontroler. Data kemudian diolah di mikrokontroler yang telah diinjeksikan program. Hasil pengolahan data akan direpresentasikan oleh nyala LED dan perputaran motor DC. Kemudian akan dianalisis bagaimana optimalisasi pemanfaatan modul surya sebagai catu daya pada lampu, tirai, dan kipas angin otomatis.
Sensor Cahaya Mikrokontroler 8535 LED Motor DC Driver Motor DC Komparator (b) akumulator Charge Controller Modul Surya (a)
2. Tahap Perancangan
Ada beberapa hal yang harus diperhatikan dalam tahap perancangan. Hal itu menyangkut perancangan perangkat keras (hardware) dan perangkat lunak (software) yang akan dijabarkan sebagai berikut:
a. Perancangan Maket dan Konstruksi Mekanik
Dimensi maket rumah pada penelitian ini berukuran 352525 cm. Maket dibuat menggunakan bahan akrilik. Akrilik dipotong sesuai ukuran yang diinginkan dengan bantuan cutter. Kemudian bagian yang satu dengan yang lainnya direkatkan menggunakan lem akrilik. Sistem mekanik diperlukan untuk menggerakkan tirai dan kipas angin. Tirai digerakkan oleh motor DC yang dapat berputar searah jarum jam dan berlawanan arah jarum jam. Sistem mekanik pada tirai menggunakan pulley dan benang yang dihubungkan dengan motor DC yang dapat dilihat pada gambar 3.3. Motor DC dan pulley diletakkan sepusat sehingga
pulley akan mengikuti pergerakan motor DC.
Gambar 3.3 Desain Konstruksi Mekanik untuk Menggerakkan Tirai
Sedangkan untuk kipas angin, motor DC dihubungkan sepusat dengan baling-baling sehingga baling-baling akan mengikuti pergerakan motor DC. Desain kipas angin ditunjukkan oleh gambar 3.4.
Tirai
Benang
Motor DC
Gambar 3.4 Desain Konstruksi Mekanik untuk Menggerakkan Kipas Angin
b. Perancangan Charge Controller
Charge controller pada penelitian ini digunakan untuk mengatur arus
untuk pengisian ke akumulator agar tidak overcharging dan overvoltage serta mengatur arus yang dibebaskan dari akumulator agar akumulator tidak full
discharge dan overloading. Prinsip kerja dari charge controller adalah saat
akumulator sudah penuh terisi maka secara otomatis pengisian arus dari modul surya berhenti. Charge controller akan mengisi akumulator sampai level tegangan tertentu, kemudian apabila level tegangan drop, maka akumulator akan diisi kembali.
Charge controller pada penelitian ini terdiri dari satu input (dua terminal)
yang terhubung dengan output modul surya dan satu output (dua terminal) yang terhubung dengan akumulator. Akumulator yang digunakan memiliki kapasitas penyimpanan daya dengan output tegangan 6V 4,5 Ah. Adapun perancangan dari
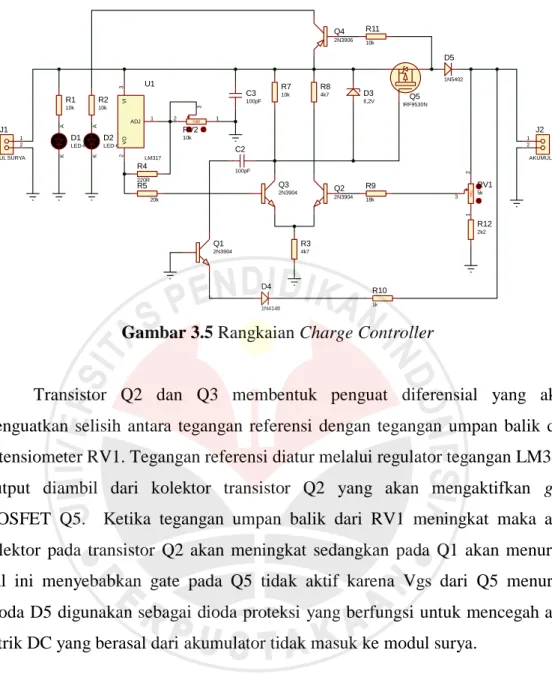
charge controller dapat dilihat pada gambar 3.5. Motor DC
R1 10k R2 10k A K D1 LED-RED A K D2 LED-GREEN D3 6,2V Q2 2N3904 Q4 2N3906 V I 3 V O 2 ADJ 1 U1 LM317 R4 220R R5 20k Q1 2N3904 Q3 2N3904 C2 100pF R7 10k R8 4k7 R9 18k D4 1N4148 R10 1k C3 100pF R11 10k Q5 IRF9530N 7 3 % 1 2 3 RV1 5k R12 2k2 88 % 1 2 3 RV2 10k R3 4k7 D5 1N5402 1 2 J1 MODUL SURYA 1 2 J2 AKUMULATOR
Gambar 3.5 Rangkaian Charge Controller
Transistor Q2 dan Q3 membentuk penguat diferensial yang akan menguatkan selisih antara tegangan referensi dengan tegangan umpan balik dari potensiometer RV1. Tegangan referensi diatur melalui regulator tegangan LM317. Output diambil dari kolektor transistor Q2 yang akan mengaktifkan gate MOSFET Q5. Ketika tegangan umpan balik dari RV1 meningkat maka arus kolektor pada transistor Q2 akan meningkat sedangkan pada Q1 akan menurun. Hal ini menyebabkan gate pada Q5 tidak aktif karena Vgs dari Q5 menurun. Dioda D5 digunakan sebagai dioda proteksi yang berfungsi untuk mencegah arus listrik DC yang berasal dari akumulator tidak masuk ke modul surya.
c. Perancangan Sensor Cahaya
Sensor cahaya yang digunakan adalah Light Dependent Resistor (LDR). Karakteristik LDR adalah nilai resistansi yang berubah-ubah sesuai dengan intensitas cahaya yang diterimanya. Semakin tinggi intensitas cahaya yang diterima LDR, maka semakin rendah nilai resistansi dari LDR. Berdasarkan literatur, nilai resistansi LDR dalam keadaan gelap sebesar 10 MΩ dan dalam keadaan terang sebesar 1 kΩ. Diharapkan tegangan keluaran saat kondisi terang adalah mendekati nilai Vcc sedangkan saat gelap mendekati 0 V. Berdasarkan
prinsip pembagi tegangan maka dipergunakan resistor dengan nilai resistansi sebesar 10 kΩ. 32.1 LDR1 R1 10k VCC Vo
Gambar 3.6 Rangkaian Sensor Cahaya
Tegangan keluaran dari rangkaian sensor cahaya dirumuskan sebagai:
(3.1)
maka,
(3.2)
(3.3)
Namun, karena lampu didesain untuk menyala pada saat kondisi tidak terlalu gelap, maka digunakan komparator. Komparator digunakan untuk membandingkan nilai tegangan referensi dengan tegangan keluaran sensor. Tegangan referensi akan ditentukan berdasarkan data tegangan dan intensitas yang diperoleh dari hasil pengukuran.
Driver yang digunakan adalah L293D. Pada motor DC, driver ini digunakan untuk menggerakkan motor, mengatur arah putaran motor DC, menghentikan motor, dan melindungi motor dari kerusakan elektronik. Driver ini dikendalikan oleh mikrokontroler yang telah diinjeksikan program di dalamnya. Driver ini memiliki dua input power yaitu Vcc yang berfungsi sebagai power untuk IC L293D dan input power motor DC. Dua input power ini berfungsi karena IC bekerja pada tegangan kerja 5 V sedangkan motor DC biasanya mempunyai tegangan kerja 6-36 V.
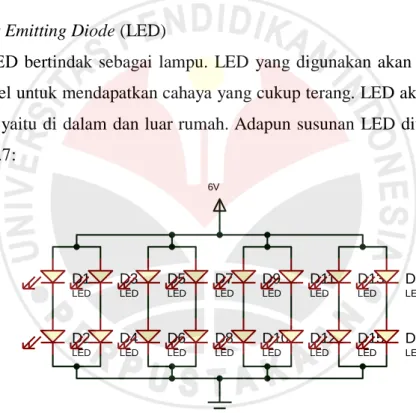
e. Light Emitting Diode (LED)
LED bertindak sebagai lampu. LED yang digunakan akan disusun secara seri-paralel untuk mendapatkan cahaya yang cukup terang. LED akan disimpan di dua titik, yaitu di dalam dan luar rumah. Adapun susunan LED ditunjukkan oleh gambar 3.7: D1 LED D2 LED D3 LED D4 LED D5 LED D6 LED D7 LED D8 LED D9 LED D10 LED D11 LED D12 LED D13 LED D14 LED D15 LED D16 LED 6V
Gambar 3.7 Susunan LED
f. Motor DC
Motor DC digunakan untuk menggerakkan tirai dan kipas angin. Motor DC akan berputar searah jarum jam untuk menutup tirai, kemudian berputar berlawanan arah jarum jam untuk membuka tirai. Arah putaran motor DC ini dapat diubah dengan mengubah polaritasnya. Polaritas motor DC dalam rangkaian ini dikendalikan oleh driver motor DC.
g. Mikrokontroller ATMEGA 8535
Mikrokontroler merupakan otak dari sistem otomatisasi lampu, tirai, dan kipas angin. Mikrokontroler membutuhkan sistem minimum untuk dapat bekerja. Sistem minimum adalah rangkaian minimal dimana mikrokontroler dapat bekerja. Sistem minimum untuk mikrokontroler hanya menghubungkan pin VCC dan AVCC ke +5 V, pin GND dan AGND ke ground, serta pin reset tidak dihubungkan apa-apa atau dapat menggunakan push button untuk memaksa pin RESET menjadi nol. Kristal eksternal dihubungkan pada pin XTAL1 dan XTAL2.
Proses download program ke IC mikrokontroler dapat menggunakan sistem download secara In-System Programming (ISP). In-System Programmable
Flash on-chip mengizinkan memori program untuk dapat diprogram ulang dalam
sistem menggunakan hubungan serial Serial Peripheral Interface (SPI). SPI menggunakan empat sinyal, yaitu Master Out Slave In (MOSI), Master In Slave
Out (MISO), Serial Clock (SCK), Chip Select (~CS) atau Slave Select (~SS).
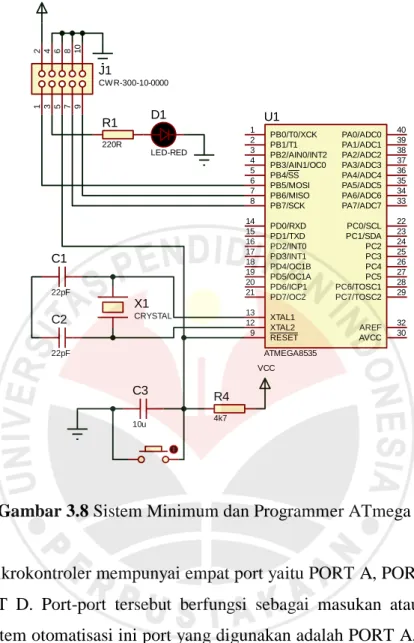
Gambar 3.8 menunjukkan sistem minimum dan programmer untuk mikrokontroler ATmega 8535:
PC6/TOSC1 28 PC5 27 PC4 26 PC3 25 PC2 24 PC1/SDA 23 PC0/SCL 22 PC7/TOSC2 29 PA6/ADC6 34 PA5/ADC5 35 PA4/ADC4 36 PA3/ADC3 37 PA2/ADC2 38 PA1/ADC1 39 PA0/ADC0 40 PA7/ADC7 33 PB6/MISO 7 PB5/MOSI 6 PB4/SS 5 PB3/AIN1/OC0 4 PB2/AIN0/INT2 3 PB1/T1 2 PB0/T0/XCK 1 PB7/SCK 8 PD6/ICP1 20 PD5/OC1A 19 PD4/OC1B 18 PD3/INT1 17 PD2/INT0 16 PD1/TXD 15 PD0/RXD 14 PD7/OC2 21 RESET 9 XTAL1 13 XTAL2 12 AVCC 30 AREF 32 U1 ATMEGA8535 C1 22pF C2 22pF X1 CRYSTAL R4 4k7 C3 10u VCC 1 3 5 7 2 4 6 8 9 1 0 J1 CW R-300-10-0000 R1 220R D1 LED-RED VCC
Gambar 3.8 Sistem Minimum dan Programmer ATmega 8535
Mikrokontroler mempunyai empat port yaitu PORT A, PORT B, PORT C, dan PORT D. Port-port tersebut berfungsi sebagai masukan ataupun keluaran. Dalam sistem otomatisasi ini port yang digunakan adalah PORT A, PORT B, dan PORT D. Adapun alamat-alamat port yang digunakan adalah sebagai berikut: PA.0 = masukan dari sensor cahaya
PA.2 = masukan dari saklar 1 (lampu) PA.3 = masukan dari saklar 2 (tirai)
PA.4 = masukan dari saklar 3 (kipas angin) PB.5 = SPI Bus Master Output (MOSI) PB.6 = SPI Bus Master Input (MISO) PB.7 = SPI Bus Serial Clock (SCK)
PC.0 = keluaran LED
PC.1 = keluaran motor DC (kipas angin) PD.0 = inable 1 driver motor DC (tirai) PD.1 = inable 2 driver motor DC (tirai) PD.5 = enable driver motor DC (tirai)
Keluaran port PC.0 dihubungkan ke relay supaya tegangan yang masuk ke LED sebesar 6 V. Jika tidak dihubungkan ke relay maka tegangan yang masuk ke LED hanya sebesar keluaran port mikrokontroler yaitu kurang lebih sebesar 5 V. Motor DC yang digunakan untuk menggerakkan tirai dihubungkan ke kaki output driver motor DC yaitu kaki nomor tiga dan enam. Gambar 3.9 menunjukkan rangkaian sistem kontrol yang digunakan:
PC6/TOSC1 28 PC5 27 PC4 26 PC3 25 PC2 24 PC1/SDA 23 PC0/SCL 22 PC7/TOSC2 29 PA6/ADC6 34 PA5/ADC5 35 PA4/ADC4 36 PA3/ADC3 37 PA2/ADC2 38 PA1/ADC1 39 PA0/ADC0 40 PA7/ADC7 33 PB6/MISO 7 PB5/MOSI 6 PB4/SS 5 PB3/AIN1/OC0 4 PB2/AIN0/INT2 3 PB1/T1 2 PB0/T0/XCK 1 PB7/SCK 8 PD6/ICP1 20 PD5/OC1A 19 PD4/OC1B 18 PD3/INT1 17 PD2/INT0 16 PD1/TXD 15 PD0/RXD 14 PD7/OC2 21 RESET 9 XTAL1 13 XTAL2 12 AVCC 30 AREF 32 U1 ATMEGA8535 IN1 2 OUT1 3 OUT2 6 OUT3 11 OUT4 14 IN2 7 IN3 10 IN4 15 EN1 1 EN2 9 VS 8 VSS 16 GND GND DM L293D +88.8 C1 22pF C2 22pF X1 CRYSTAL VCC D4 1N4001 D5 1N4001 D6 1N4001 D7 1N4001 VCC R4 4k7 C3 10u VCC D1 LED-RED D2 LED-RED D3 LED-RED D12 LED-RED D13 LED-RED D14 LED-RED 1 3 5 7 2 4 6 8 9 10 J1 CWR-300-10-0000 D21 LED-RED R1 220R VCC RL1 OMIH-SH-105D 6 V SENSOR CAHAYA R2 220R R3 220R R5 220R VCC + 8 8 .8 6 V
Gambar 3.9 Rangkaian Sistem Otomatisasi
Catu daya atau power supply adalah sebuah peralatan penyedia tegangan atau sumber daya untuk peralatan elektronika dengan prinsip mengubah tegangan listrik yang tersedia dari jaringan distribusi transmisi listrik ke level yang diinginkan sehingga berimplikasi pada pengubahan daya listrik. Rangkaian catu daya digunakan untuk memenuhi tegangan yang dibutuhkan dan menstabilkannya. Catu daya yang digunakan dalam rangkaian ini adalah akumulator yang mempunyai tegangan kerja 6 V dan kapasitas 4,5 Ah. akumulator ini sekaligus menjadi beban dari modul surya. Pengisian dan pengosongan akumulator diatur oleh charge controller. Keluaran dari akumulator akan digunakan oleh keluaran sistem dalam hal ini LED dan motor DC sedangkan untuk sensor dan kontroler tegangan kerja dari akumulator akan diregulasi menggunakan 7805 (gambar 3.10).
VI 1 VO 3 G N D 2 U1 7805
TEGANGAN INPUT TEGANGAN OUTPUT
Gambar 3.10 Rangkaian Regulator Tegangan
i. Perangkat Lunak (Software)
Perangkat lunak yang digunakan dalam penelitian ini adalah Proteus 7 Profesional dan CodeVisionAVR C Compiler, Version 2.04.9 Evaluation. Proteus digunakan untuk menggambar rangkaian dan membuat layout PCB. Dalam
software ini terdapat komponen-komponen elektronika yang digunakan dalam
rangkaian sehingga memudahkan pembuatan gambar rangkaian dan layout PCB. Selain itu, hasil rangkaian yang telah dibuat pun dapat disimulasikan sehingga dapat diketahui apakah ada bagian yang salah atau tidak. Sedangkan CodeVisionAVR digunakan untuk menuliskan program yang akan diinjeksikan ke dalam mikrokontroler. Program yang telah dibuat, disimpan dalam ekstensi *.c. Kemudian program di-compile menjadi ekstensi *.hex. Setelah itu, file *.hex
tersebut di-downloadkan ke dalam minimum sistem ATmega 8535. Sebelum membuat program yang akan diinjeksikan ke dalam mikrokontroler, terlebih dahulu dibuat flowchart supaya tidak ada langkah yang terlewat. Berikut
flowchart (gambar 3.11) dalam sistem yang akan dibuat:
Mulai
Inisialisasi PORTA.0 = input sensor PORTC.0 = output LED PORTC.1 = output motor DC PORTD.0&1 = output motor DC
motor Input LDR =1? Nyalakan LED Matikan LED Tutup Tirai Buka Tirai Selesai Ya Tidak Matikan Kipas Angin Nyalakan Kipas Angin
Gambar 3.11 Diagram Alir Program
Berdasarkan gambar 3.11 Aliran program diawali dengan inisialisasi input dan output. Kemudian selanjutnya program dirancang dan dibuat sebagai berikut: 1) Sensor cahaya (PINA.0) akan berlogika 1 jika intensitas cahaya yang diterima
LDR rendah dan berlogika 0 jika intensitas cahaya yang diterima LDR tinggi. 2) Ketika sensor cahaya berlogika 1 maka mikrokontroler akan memberikan logika 1 ke PORTC.0 sehingga lampu akan menyala. Selain itu, mikrokontroler juga memberikan logika 0 ke inable 1 (PORTD.0) dan logika 1 ke inable 2 (PORTD.1) driver motor DC. Motor yang akan berputar searah jarum jam yang digunakan untuk menutup tirai. Motor akan berputar selama delay (200 ms) kemudian berhenti. Mikrokontroler juga akan memberikan logika 0 pada PORTC.1 untuk mematikan kipas angin.
3) Ketika sensor cahaya berlogika 0 maka mikrokontroler akan memberikan logika 0 ke PORTC.0 sehingga lampu akan mati. Selain itu, mikrokontroler juga memberikan logika 1 ke inable 1 (PORTD.0) dan logika 0 ke inable 2 (PORTD.1) driver motor DC. Motor akan berputar berlawanan arah jarum jam yang digunakan untuk membuka tirai. Motor akan berputar selama delay (200 ms) kemudian berhenti. Mikrokontroler juga akan memberikan logika 1 pada PORTC.1 untuk menyalakan kipas angin.
4) Lampu, tirai, dan kipas angin juga dapat dikendalikan dengan switch manual. Hal ini dilakukan supaya pada kondisi tertentu lampu, tirai, dan kipas angin tidak bergantung pada sensor. Namun, untuk lampu switch hanya dapat digunakan pada siang hari karena di desain pada malam hari, lampu harus menyala. Switch untuk lampu terdapat pada PINA.2, tirai pada PINA.3, dan kipas angin pada PINA.4. Cara kerja switch sama dengan sensor yang telah dijelaskan pada poin sebelumnya.
a. Pembuatan Perangkat Keras (Hardware)
Skematik rangkaian charge controller, sensor cahaya, dan mikrokontroler direalisasikan ke dalam PCB menggunakan software Proteus 7 Profesional. Untuk memulai menjalankan program ISIS Proteus, buka program melalui menu Start| All Program| Proteus 7 Profesional | ISIS 7 profesional atau melaui desktop dengan double click lambang ISIS 7 Profesional.
Gambar 3.12 Tampilan Awal ISIS Proteus
Toolbar yang sering digunakan untuk memnuat skematik rangkaian dan melakukan ditunjukkan pada gambar 3.13.
Gambar 3.13 Toolbar ISIS 7 Profesional
Berikut ini fungsi dari asing-masing toolbar: 1) Selection Mode merupakan kursor.
2) Component Mode digunakan untuk memunculkan part atau komponen yang akan digunakan.
3) Wire Label Mode digunakan untuk memberikan label pada wire (kabel/koneksi).
4) Text Script Mode digunakan untuk menambahkan text script pada lembar kerja, biasanya digunakan untuk memberikan keterangan atau catatan.
5) Buses Mode digunakan untuk memfungsikan wire sebagai bus (bus adalah kumpulan dari beberapa koneksi).
6) Terminals Mode digunakan untuk memunculkan terminal, seperti power,
ground, input, output dan bidir (bidirectional).
7) Graph Mode digunakan untuk menampilkan berbagai bentuk sinyal digital maupun analog dalam bentuk grafik.
8) Generator Mode digunakan sebagai penghasil (generator) sinyal DC, sinus,
clock dan beberapa sinyal lainnya.
9) Virtual Instruments Mode merupakan sebuah virtual instrumentasi yang biasanya digunakan sebagai alat penampil bentuk gelombang, instrumentasi pengukuran dan lainnya.
10) 2D Graphics Line Mode merupakan sebuah wire atau koneksi yang menghubungkan antara komponen-komponen, dengan kata lain adalah kabel. 11) 2D Graphics Text Mode digunakan untuk menampilkan teks 2 dimensi. 12) Play digunakan untuk menjalankan simulasi.
13) Pause digunakan untuk mem-pause simulasi. 14) Stop digunakan untuk menghentikan simulasi.
Hal pertama yang dilakukan sebelum meletakkan komponen ke dalam lembar kerja adalah mencari komponen dari library. Setelah seluruh komponen yang akan digunakan untuk membangun skematik rangkaian telah lengkap, langkah selanjutnya adalah memindahkan komponen-komponen yang terdapat pada objek selector pada window editing. Kemudian hubungkan komponen sesuai rangkaian yang akan dibuat. Simpan dokumen yang telah dibuat.
Setelah skematik rangkaian dibuat di ISIS, selanjutnya adalah membuat
layout PCB melalui program ARES. Setelah skematik dibuat di ISIS, klik icon
Netlist Transfer to ARES yang terletak pada pojok kanan atas ( ). Mulailah meletakkan komponen ke dalam lembar kerja. Jalur dapat dibuat manual atau otomatis. Jalur manual dapat dibuat dengan menghubungkan trace yang diatur melalui toolbar track mode. Sedangkan jalur otomatis dapat dibuat dengan mengklik Tools| Auto Router| Begin Routing.
Hasil pembuatan layout PCB secara keseluruhan dapat dilihat pada lampiran 4. Untuk merealisasikan layout PCB ke dalam bentuk yang sesungguhnya dapat dibuat PCB sendiri atau diserahkan ke toko penerima jasa pembuatan PCB. Dalam penelitian ini PCB dibuat di toko pembuatan PCB.
Setelah PCB selesai dibuat, tahapan selanjutnya adalah pemasangan komponen. Proses ini biasanya disebut dengan soldering. Bahan yang digunakan untuk melekatkan komponen adalah timah. Penyedot timah dan tang pemotong pun harus dipersiapkan untuk mengantisipasi kesalahan-kesalahan yang mungkin terjadi pada proses soldering.
Tahapan pada proses soldering adalah memanaskan solder sampai solder tersebut mampu mencairkan timah. Kemudian masukkan kaki-kaki komponen pada lubang yang telah terbentuk pada PCB sesuai dengan jalurnya. Pemasangan komponen sebaiknya dimulai dengan komponen pasif terlebih dahulu dan untuk komponen seperti IC sebaiknya jangan menyolder langsung pada PCB, gunakan soket supaya IC tidak terkena panas dari penyolderan, selain itu soket juga mempermudah saat penggantian IC jika IC rusak. Pemasangan komponen dilakukan satu persatu. Setelah komponen dipasang lakukan penyolderan, kemudian potong kaki-kaki komponen menggunakan tang pemotong.
b. Pemrograman Mikrokontroler
Mikrokontoler dapat bekerja karena terdapat program yang telah diinjeksikan. Program yang digunakan pada penelitian ini menggunakan bahasa C yang dibuat dengan CodeVisionAVR.
Untuk memulai menjalankan CodeVisionAVR, buka program melalui menu Start| All Program| CodeVision| CodeVisionAVR C Compiler atau melaui desktop dengan double click lambang CodeVisionAVR. Pilih File| New| Pilih File Type→Project. Saat muncul tampilan konfirmasi dan menanyakan apakah akan menggunakan CodeWizard untuk membuat project baru, pilih yes. Kemudian akan tampil konfigurasi USART, Analog Comparator, ADC, SPI, I2C, 1 Wire, 2 Wire, LCD, Bit-Banged, Project Information, Chip, Port, External IRQ, dan
Timer. Atur program yang akan dibuat melalui CodeWizard. Setelah
mengonfigurasi project, pilih File| Generate, Save, and Exit. Kemudian beri nama
file source (*.c), file project (*.prj), dan file project codewizard (*.cwp) sehingga
akan tampil source code yang telah dibuat seperti ditunjukkan gambar 3.14.
Gambar 3.14 Code Program (Source Code)
Setelah berhasil membuat program menggunakan CodeWizardAVR, tambahkan variabel dan instruksi-instruksi tambahan ke dalam program. Jika sudah membuat program, compile program, pilih Project| Compile. Jika ada kesalahan, klik keterangan error atau warning yang terdapat pada bagian
messages, kemudian letak kesalahan akan ditampilkan, perbaiki kesalahan
Untuk memasukkan program yang sudah dibuat ke dalam mikrokontroler, lakukan terlebih dahulu setting programmer, pilih Settings| Programmer. Dalam penelitian ini digunakan downloader DT-HiQ AVR USB ISP Miki sehingga dalam setting
programmer dipilih Atmel AVRISP MkII (USB).
Kemudian pastikan program yang akan dimasukkan dikonfigurasi terlebih dahulu sehingga tidak salah memasukkan program. Untuk mengonfigurasi file program klik Project| Configure, dan tambahkan file program yang akan dimasukkan ke dalam mikrokontroler. Kemudian klik After Build dan centang program the chip.
Setelah itu, pilih Project| Build atau dengan menekan shift+F9, sehingga akan tampil kotak dialog seperti gambar 3.15. Klik Program the chip, tunggu beberapa saat sampai proses pengisian program ke mikrokontroler selesai dan mikrokontroler pun dapat digunakan. Sebelum mengeksekusi program pada rangkaian, pastikan rangkaian terhubung dengan baik.