33
BAB IV
PENGUJIAN DAN ANALISIS
Pada bab ini akan dibahas mengenai pengujian alat serta analisis dari hasil pengujian pada algoritma pengikut matahari dan sistem – sistem lainnya. Tujuan dari pengujian adalah mengetahui hasil perancangan alat dari semua sistem yang dapat bekerja sesuai dengan perancangan yang telah dibuat.
Pada sub bab 4.1 akan dibahas mengenai pengujian hardware sistem, pada sub bab 4.2 akan dibahas mengenai pengujian software sistem dengan menggunakan algoritma Plataforma Solar de Almerýa (PSA), dan pada sub bab 4.3 akan mengenai tentang pengujian mekanik sistem.
4.1. Pengujian Hardware Sistem 4.1.1. Modul Arduino Uno
Pada modul Arduino Uno menggunakan mikrokontroler ATmega328 yang membutuhkan tegangan sebesar 5 volt. Didalam modul Arduino Uno ini sudah dilengkapi regulator, maka dari itu dibutuhkan tegangan dari luar antara 7-12 Volt. Arduino uno akan mendapatkan tegangan dari luar sebesar 12 Volt dari aki.
4.1.2. Modul Motor Driver
Pada 4 buah optocoupler ( PC 817 ) ini akan diberi inputan dari mikrokontroler pada pin 12 dan pin 11 sebagai kontrol gerak altitude, pin 10 dan pin 9 sebagai kontrol gerak azimuth. Keluaran pada
optocoupler akan mengaktifkan relay yang telah ditentukan. Modul ini
diberi masukan tegangan sebesar 12 volt. Pada Tabel 4.1 dibawah ini akan menjelaskan logika yang menentukan pergerakan motor melalui relay.
34
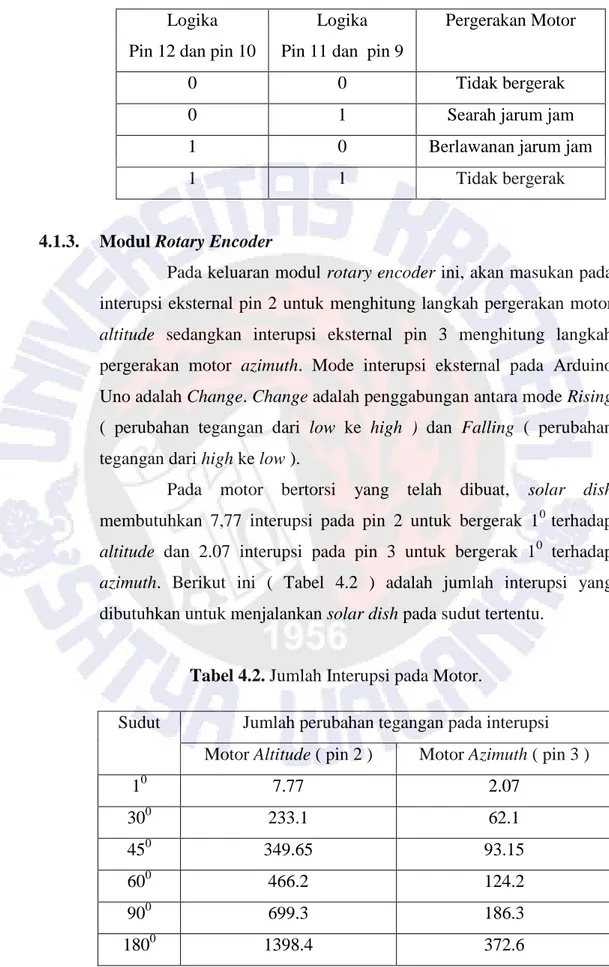
Tabel 4.1. Logika Pada Motor Driver.
Logika Pin 12 dan pin 10
Logika Pin 11 dan pin 9
Pergerakan Motor
0 0 Tidak bergerak
0 1 Searah jarum jam
1 0 Berlawanan jarum jam
1 1 Tidak bergerak
4.1.3. Modul Rotary Encoder
Pada keluaran modul rotary encoder ini, akan masukan pada interupsi eksternal pin 2 untuk menghitung langkah pergerakan motor
altitude sedangkan interupsi eksternal pin 3 menghitung langkah
pergerakan motor azimuth. Mode interupsi eksternal pada Arduino Uno adalah Change. Change adalah penggabungan antara mode Rising ( perubahan tegangan dari low ke high ) dan Falling ( perubahan tegangan dari high ke low ).
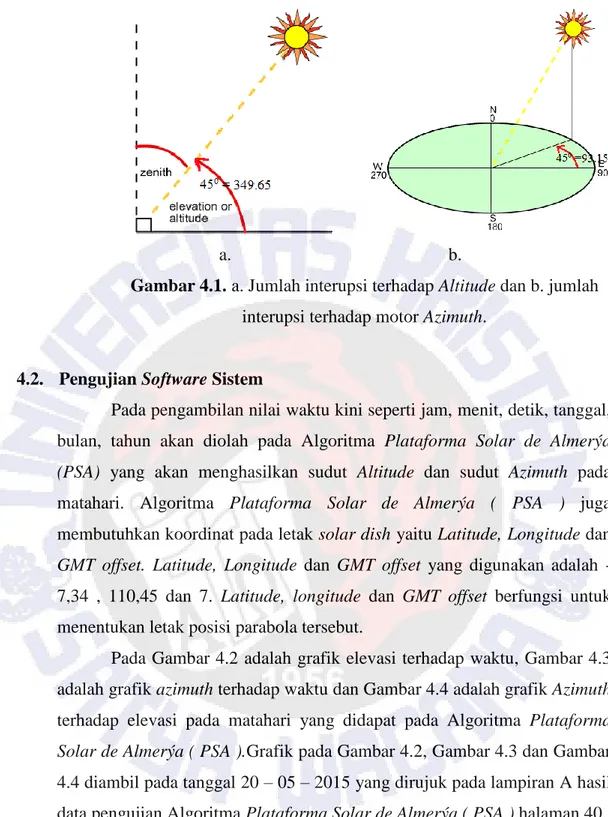
Pada motor bertorsi yang telah dibuat, solar dish membutuhkan 7,77 interupsi pada pin 2 untuk bergerak 10 terhadap
altitude dan 2.07 interupsi pada pin 3 untuk bergerak 10 terhadap
azimuth. Berikut ini ( Tabel 4.2 ) adalah jumlah interupsi yang
dibutuhkan untuk menjalankan solar dish pada sudut tertentu.
Tabel 4.2. Jumlah Interupsi pada Motor.
Sudut Jumlah perubahan tegangan pada interupsi Motor Altitude ( pin 2 ) Motor Azimuth ( pin 3 )
10 7.77 2.07 300 233.1 62.1 450 349.65 93.15 600 466.2 124.2 900 699.3 186.3 1800 1398.4 372.6
35
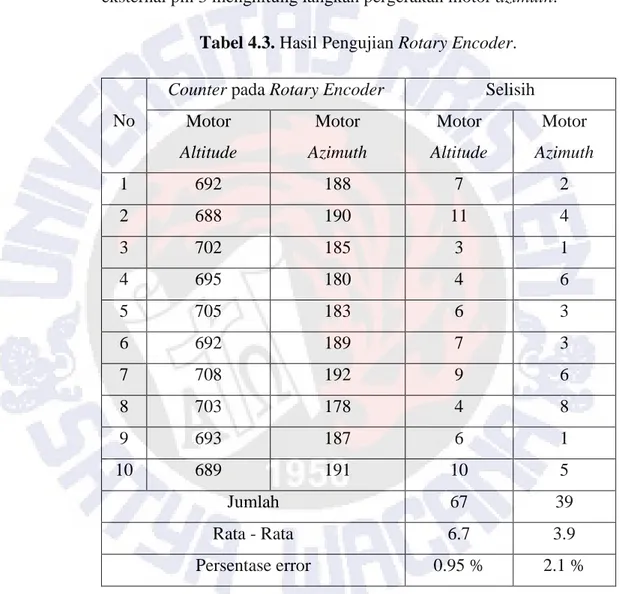
Pada pengujian modul rotary encoder ini, menghitung interupsi eksternal pada motor altitude maupun azimuth pada sudut 900 sebanyak 10 kali percobaan. Jumlah counter seharusnya pada Rotary
Encoder Altitude adalah 699 dan Rotary Encoder Azimuth adalah 186
Berikut ini adalah hasil penghitungan interupsi eksternal serta pin 2 menghitung langkah pergerakan motor altitude sedangkan interupsi eksternal pin 3 menghitung langkah pergerakan motor azimuth.
Tabel 4.3. Hasil Pengujian Rotary Encoder.
No
Counter pada Rotary Encoder Selisih Motor Altitude Motor Azimuth Motor Altitude Motor Azimuth 1 692 188 7 2 2 688 190 11 4 3 702 185 3 1 4 695 180 4 6 5 705 183 6 3 6 692 189 7 3 7 708 192 9 6 8 703 178 4 8 9 693 187 6 1 10 689 191 10 5 Jumlah 67 39 Rata - Rata 6.7 3.9 Persentase error 0.95 % 2.1 %
36
a. b.
Gambar 4.1. a. Jumlah interupsi terhadap Altitude dan b. jumlah
interupsi terhadap motor Azimuth.
4.2. Pengujian Software Sistem
Pada pengambilan nilai waktu kini seperti jam, menit, detik, tanggal, bulan, tahun akan diolah pada Algoritma Plataforma Solar de Almerýa
(PSA) yang akan menghasilkan sudut Altitude dan sudut Azimuth pada
matahari. Algoritma Plataforma Solar de Almerýa ( PSA ) juga membutuhkan koordinat pada letak solar dish yaitu Latitude, Longitude dan
GMT offset. Latitude, Longitude dan GMT offset yang digunakan adalah
-7,34 , 110,45 dan 7. Latitude, longitude dan GMT offset berfungsi untuk menentukan letak posisi parabola tersebut.
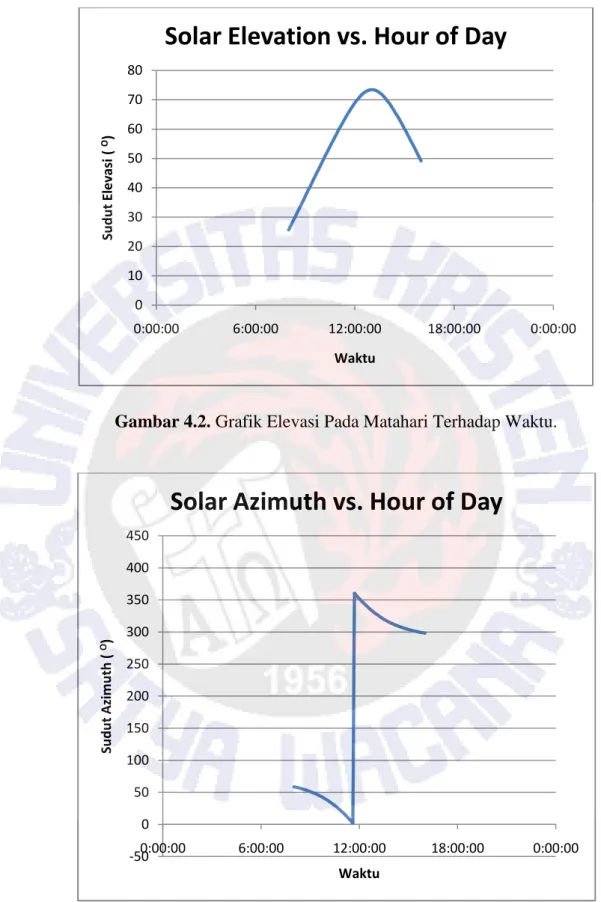
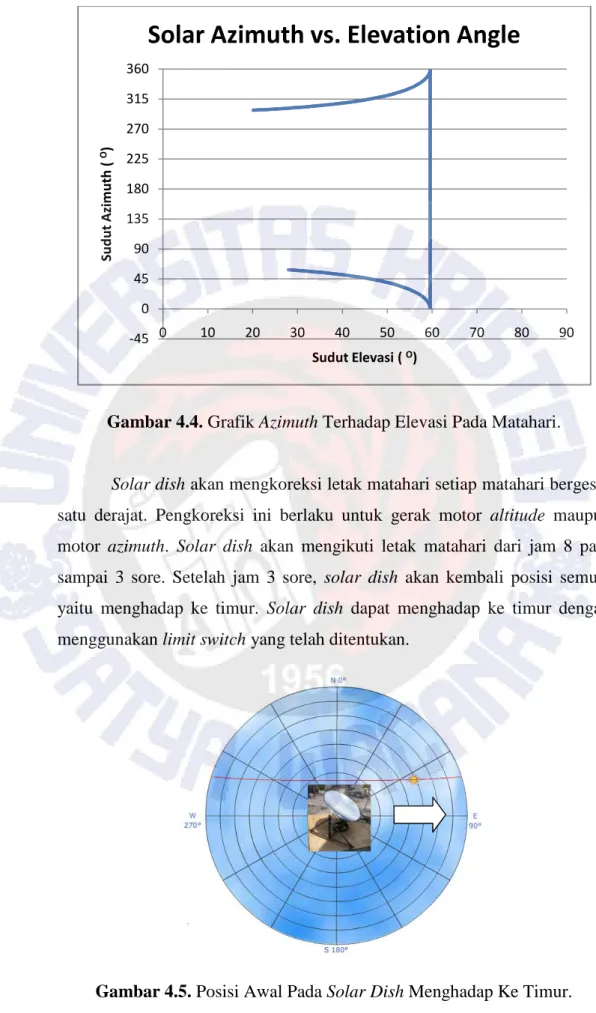
Pada Gambar 4.2 adalah grafik elevasi terhadap waktu, Gambar 4.3 adalah grafik azimuth terhadap waktu dan Gambar 4.4 adalah grafik Azimuth terhadap elevasi pada matahari yang didapat pada Algoritma Plataforma
Solar de Almerýa ( PSA ).Grafik pada Gambar 4.2, Gambar 4.3 dan Gambar
4.4 diambil pada tanggal 20 – 05 – 2015 yang dirujuk pada lampiran A hasil data pengujian Algoritma Plataforma Solar de Almerýa ( PSA ) halaman 40.
Tabel dari hasil data pengujian dari pengujian Algoritma Plataforma
Solar de Almerýa ( PSA ) terdiri dari Time, d, B, LT ( Local Time ), LSTM ( Local Standard Time Meridian ), EoT ( Equation of Time ), TC ( Time Correction Factor ), HRA ( Hour Angle ), Delta ( Declination Angle ), Altitude Angle, Azimuth Angle.
37
Gambar 4.2. Grafik Elevasi Pada Matahari Terhadap Waktu.
Gambar 4.3. Grafik Azimuth Pada Matahari Terhadap Waktu.
0 10 20 30 40 50 60 70 80 0:00:00 6:00:00 12:00:00 18:00:00 0:00:00 Su d u t El e vasi ( O) Waktu
Solar Elevation vs. Hour of Day
-50 0 50 100 150 200 250 300 350 400 450 0:00:00 6:00:00 12:00:00 18:00:00 0:00:00 Su d u t A zi m u th ( O) Waktu
38
Gambar 4.4. Grafik Azimuth Terhadap Elevasi Pada Matahari.
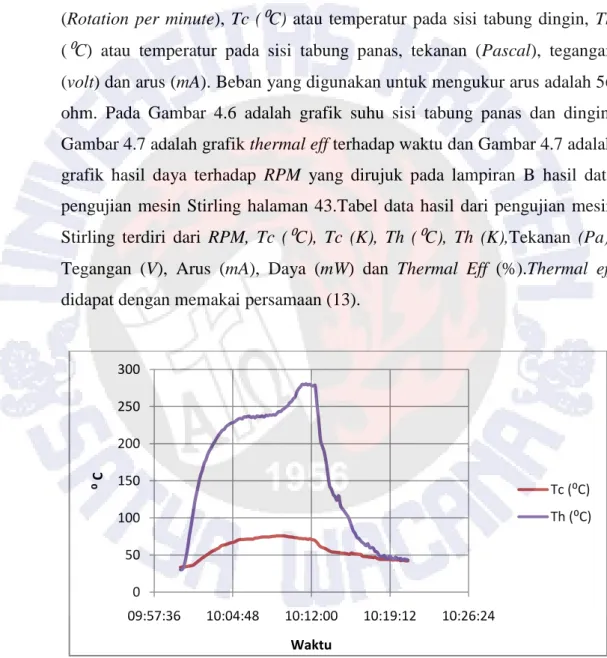
Solar dish akan mengkoreksi letak matahari setiap matahari bergeser
satu derajat. Pengkoreksi ini berlaku untuk gerak motor altitude maupun motor azimuth. Solar dish akan mengikuti letak matahari dari jam 8 pagi sampai 3 sore. Setelah jam 3 sore, solar dish akan kembali posisi semula yaitu menghadap ke timur. Solar dish dapat menghadap ke timur dengan menggunakan limit switch yang telah ditentukan.
Gambar 4.5. Posisi Awal Pada Solar Dish Menghadap Ke Timur.
-45 0 45 90 135 180 225 270 315 360 0 10 20 30 40 50 60 70 80 90 Su d u t A zi m u th ( O) Sudut Elevasi ( O)
39
4.3. Pengujian Mekanik Sistem
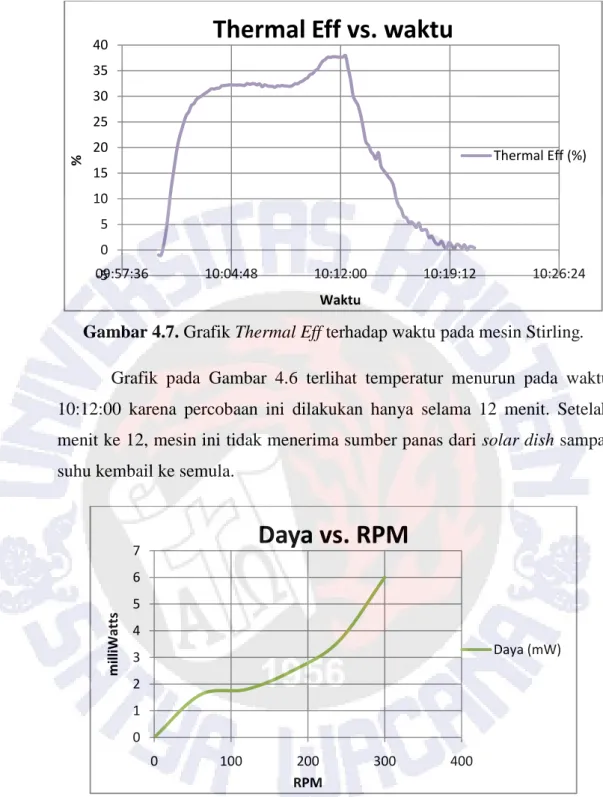
Pengujian pada mesin Stirling dilakukan pada tanggal 28juni 2015 dari jam 10:00:00 sampai 10:20:50 dengan sumber panas dari daya radiasi dari luar yang telah difokuskan oleh solar dish. Setiap data diambil setiap 10 detik.
Data yang diambil pada pengujian mesin Stirling ini adalah RPM (Rotation per minute), Tc (⁰C) atau temperatur pada sisi tabung dingin, Th (⁰C) atau temperatur pada sisi tabung panas, tekanan (Pascal), tegangan (volt) dan arus (mA). Beban yang digunakan untuk mengukur arus adalah 56 ohm. Pada Gambar 4.6 adalah grafik suhu sisi tabung panas dan dingin, Gambar 4.7 adalah grafik thermal eff terhadap waktu dan Gambar 4.7 adalah grafik hasil daya terhadap RPM yang dirujuk pada lampiran B hasil data pengujian mesin Stirling halaman 43.Tabel data hasil dari pengujian mesin Stirling terdiri dari RPM, Tc (⁰C), Tc (K), Th (⁰C), Th (K),Tekanan (Pa), Tegangan (V), Arus (mA), Daya (mW) dan Thermal Eff (%).Thermal eff didapat dengan memakai persamaan (13).
Gambar 4.6. Suhu sisi tabung panas dan dingin pada mesin Stirling.
0 50 100 150 200 250 300 09:57:36 10:04:48 10:12:00 10:19:12 10:26:24 ⁰ C Waktu Tc (⁰C) Th (⁰C)
40
Gambar 4.7. Grafik Thermal Eff terhadap waktu pada mesin Stirling.
Grafik pada Gambar 4.6 terlihat temperatur menurun pada waktu 10:12:00 karena percobaan ini dilakukan hanya selama 12 menit. Setelah menit ke 12, mesin ini tidak menerima sumber panas dari solar dish sampai suhu kembail ke semula.
Gambar 4.8. Grafik Hasil Daya pada mesin Stirling.
Pada Gambar 4.8 menggambarkan grafik daya yang dihasilkan oleh mesin Stirling melalui generator listrik terhadap RPM. Beban yang digunakan untuk mengukur arus adalah 56 ohm. Pada grafik terlihat RPM yang semakin meningkat maka daya yang dihasilkan pun semakin meningkat. -5 0 5 10 15 20 25 30 35 40 09:57:36 10:04:48 10:12:00 10:19:12 10:26:24 % Waktu
Thermal Eff vs. waktu
Thermal Eff (%) 0 1 2 3 4 5 6 7 0 100 200 300 400 m ill iWatts RPM