SEGMENTASI CITRA GIGI BERBASIS THRESHOLD
DAN INTEGRAL PROJECTION
Agus Zainal Arifin1, Dini Adni Navastara1, Prambhudi Lesmonoi.1
1Fakultas Teknologi Informasi,
Institut Teknologi Sepuluh Nopember (ITS), Surabaya, 60111, Indonesia E-mail : [email protected], [email protected]
Abstrak Proses segmentasi pada citra x-ray gigi sangatlah bermanfaat dalam proses penggalian informasi selanjutnya, akan tetapi terdapat permasalahan dalam proses segmentasi. Hal ini disebabkan oleh adanya noise, citra yang berkontras tinggi, dan citra yang berkontras rendah. Untuk itu pada penelitian ini digunakan threshold kombinasi yang terdiri dari edge canny dan iterative thresholding kemudian dilakukan adaptive thresholding. Untuk proses pemisahan antara rahang atas dengan rahang bawah digunakan horizontal integral projection. Sedangkan untuk memisahkan antar gigi digunakan proses vertical integral projection. Sebagai uji coba digunakan dua jenis citra yaitu citra ROI panoramic dan citra bitewing. Berdasarkan hasil uji coba, pada proses horizontal projection tidak terdapat kendala untuk citra bitewing sedangkan pada citra ROI panoramic mencapai akurasi sebesar 60%. Dan rata-rata akurasi pemisahan gigi pada citra ROI panoramic sebesar 22% sedangkan pada citra bitewing sebesar 74%.
Kata Kunci: threshold kombinasi, adaptive threshold, horizontal projection, vertical projection, bitewing, panoramic..
1. PENDAHULUAN
Gigi merupakan bagian terunik dari tubuh manusia, dikarenakan gigi adalah bagian tulang yang tertanam pada rahang dan menembus pada jaringan mulut. Bagian dari gigi dapat dikategorikan menjadi dua bagian, bagian yang pertama adalah bagian yang nampak atau disebut badan gigi dan bagian yang kedua adalah akar dari gigi. Akar gigi adalah bagain dari gigi yang tertanam pada jaringan yang terdapat pada rahang.
Untuk mengetahui struktur dari gigi dan jaringan yang mengelilingi dari gigi dapat dilakukan dengan proses pengambilan citra gigi menggunakan sinar X atau Dental Radiograph. Radiograph adalah sebuah citra yang dihasilkan pada sebuah film fotografik spesial atau piringan dengan menggunakan sinar radiasi.
Dental X-Rays merupakan citra radiograph dari gigi, tulang, dan jaringan lembut disekitarnya. Dental X-Rays digunakan untuk mengidentifikasi permasalahan yang menyangkut gigi, mulut, dan rahang. Citra X-Ray dapat memperlihatkan lubang pada gigi, susunan gigi yang tersembunyi, dan tulang yang seolah-olah menghilang yang tidak bisa dilihat pada saat pemeriksaan visual. Dental X-Rays juga bisa dapat dilakukan sebagai kelanjutan dan pengecekan hasil dari perawatan gigi.
Ada dua macam cara peletakan film radiography atau sensor yaitu didalam mulut (Intraoral radiographyic
views) dan diluar mulut (Extraoral radiographic views). Berdasarkan komposisi dari gigi yang dihasilkan dental X-ray dapat dibedakan menjadi beberapa bagian diantranya adalah :
1. Periapical view
Periapical view adalah pengambilan citra gigi anterior dan posterior. Bedasarkan komposisi periapical merupakan citra dari gigi pada salah satu rahang.
2. Bitewing view
Bitewing view digunakan untuk memvisualisasikan mahkota gigi posterior (gigi belakang). Bitewing adalah gambaran dari gigi yang terdiri dari rahang atas dan rahang bawah.
3. Panoramic view
Panoramic view adalah gambaran dari keseluruhan dari komposisi gigi. Mulai anterior sampai posterior baik rahang atas maupun rahang bawah.
Ada banyak cara yang digunakan untuk melakukan proses segmentasi pada Dental X-Ray. Cara yang umum adalah dengam melakukan proses thresholding pada citra Dental X-Ray. Akan tetapi metode pencarian thresholding kurang begitu signifikan dalam memisahkan antara rahang atas dan rahang bawah. Dan juga dalam memisahkan bagian pada masing-masing gigi.
Oleh karena itu dalam tugas akhir ini metode yang digunakan untuk memisahkan antara rahang atas dengan rahang bawah dapat dilakukan dengan segmentasi citra gigi berbasis threshold dan integral projection. Proses ini meliputi Thresholding kombinasi dan adaptive Thresholding, Horizontal Projection dan Vertical Projection.
2. METODE
2.1. TRHESHOLD KOMBINASI
Threshold kombinasi adalah threshold yang didapatkan dari penggabungan nilai threshold canny dan iterative thresholding.
2.1.1 Threshold Edge Canny
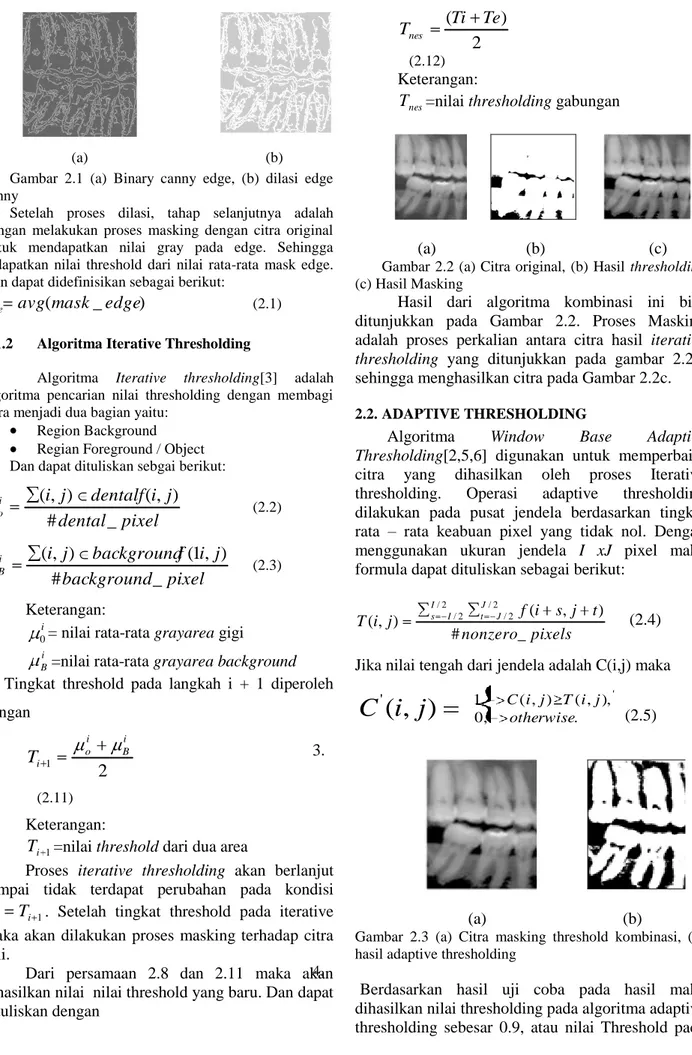
Edge Canny detection[4] adalah algoritma pedeteksian tepi dari suatu object. Tujuan dari pengguanaan dari edge canny detection adalah untuk mengetahu tingkat kekontrasan pada kontur gigi. Proses edge canny detection digabungkan denga proses dilasi yang dengan square constructing objek sebesar 2. Sesuai pada Gambar 2.1
(a) (b) Gambar 2.1 (a) Binary canny edge, (b) dilasi edge canny
Setelah proses dilasi, tahap selanjutnya adalah dengan melakukan proses masking dengan citra original untuk mendapatkan nilai gray pada edge. Sehingga didapatkan nilai threshold dari nilai rata-rata mask edge. Dan dapat didefinisikan sebagai berikut:
)
_
(
mask
edge
avg
T
e (2.1)2.1.2 Algoritma Iterative Thresholding
Algoritma Iterative thresholding[3] adalah algoritma pencarian nilai thresholding dengan membagi citra menjadi dua bagian yaitu:
Region Background Regian Foreground / Object Dan dapat dituliskan sebgai berikut:
pixel
dental
j
i
dentalf
j
i
i o_
#
)
,
(
)
,
(
(2.2)pixel
background
j
i
f
background
j
i
i B_
#
)
,
1
(
)
,
(
(2.3)Keterangan:
i0
= nilai rata-rata grayarea gigi
i
B
=nilai rata-rata grayarea background
Tingkat threshold pada langkah i + 1 diperoleh
dengan
2
1 i B i o iT
(2.11)Keterangan:
1 iT
=nilai threshold dari dua area
Proses iterative thresholding akan berlanjut
sampai tidak terdapat perubahan pada kondisi
1
i
i
T
T
. Setelah tingkat threshold pada iterative
maka akan dilakukan proses masking terhadap citra
asli.
Dari persamaan 2.8 dan 2.11 maka akan
dihasilkan nilai nilai threshold yang baru. Dan dapat
2
)
(
Ti
Te
T
nes (2.12)Keterangan:
nesT
=nilai thresholding gabungan
(a)
(b)
(c)
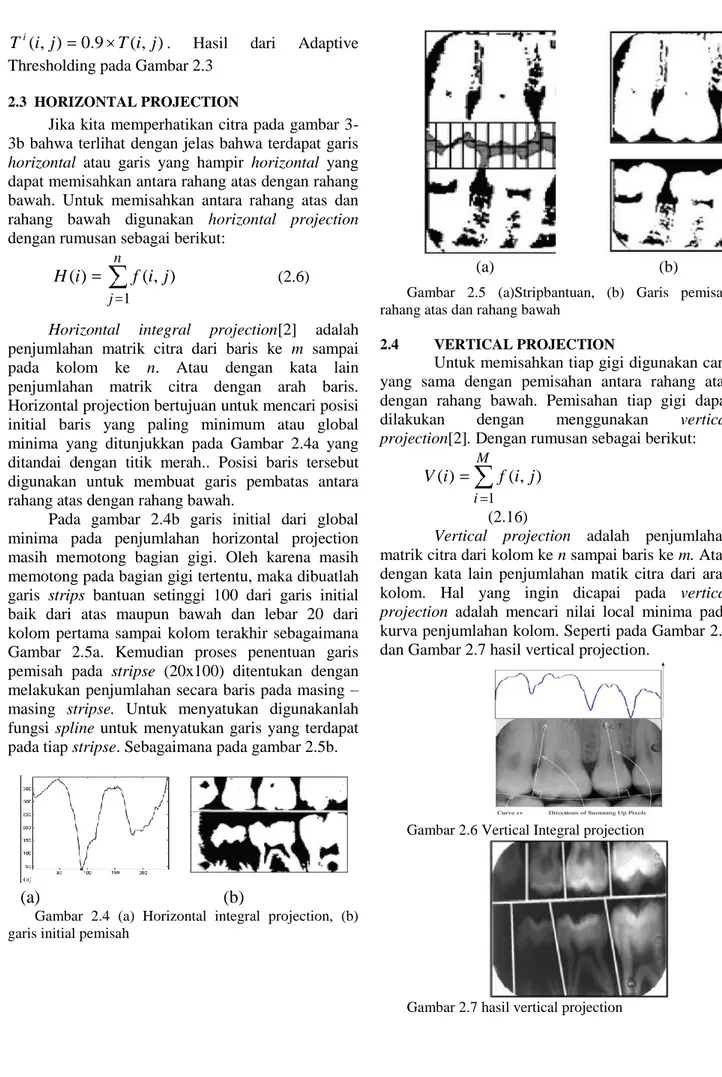
Gambar 2.2 (a) Citra original, (b) Hasil thresholding (c) Hasil Masking
Hasil dari algoritma kombinasi ini bisa
ditunjukkan pada Gambar 2.2. Proses Masking
adalah proses perkalian antara citra hasil iterative
thresholding yang ditunjukkan pada gambar 2.2b.
sehingga menghasilkan citra pada Gambar 2.2c.
2.2. ADAPTIVE THRESHOLDING
Algoritma
Window
Base
Adaptive
Thresholding[2,5,6] digunakan untuk memperbaiki
citra
yang
dihasilkan
oleh
proses
Iterative
thresholding.
Operasi
adaptive
thresholding
dilakukan pada pusat jendela berdasarkan tingkat
rata – rata keabuan pixel yang tidak nol. Dengan
menggunakan ukuran jendela I xJ pixel maka
formula dapat dituliskan sebagai berikut:
pixels
nonzero
t
j
s
i
f
j
i
T
J J t I I s_
#
)
,
(
)
,
(
2 / 2 / 2 / 2 /(2.4)
Jika nilai tengah dari jendela adalah C(i,j) maka
' ), , ( ) , ( , 1 . , 0 '
)
,
(
i
j
Cotherwisei j T i jC
(2.5)
3.
(a)
(b)
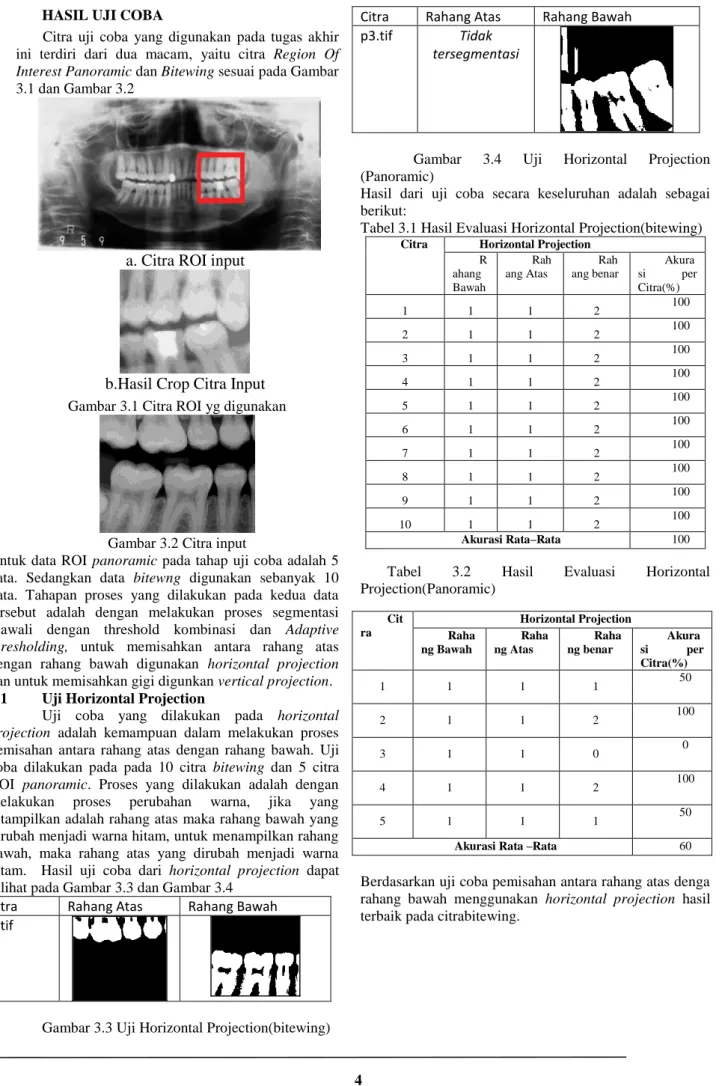
Gambar 2.3 (a) Citra masking threshold kombinasi, (b) hasil adaptive thresholding
4.
)
,
(
9
.
0
)
,
(
i
j
T
i
j
T
i.
Hasil
dari
Adaptive
Thresholding pada Gambar 2.3
2.3 HORIZONTAL PROJECTION
Jika kita memperhatikan citra pada gambar
3-3b bahwa terlihat dengan jelas bahwa terdapat garis
horizontal atau garis yang hampir horizontal yang
dapat memisahkan antara rahang atas dengan rahang
bawah. Untuk memisahkan antara rahang atas dan
rahang bawah digunakan horizontal projection
dengan rumusan sebagai berikut:
n j
j
i
f
i
H
1)
,
(
)
(
(2.6)
Horizontal integral projection[2] adalah
penjumlahan matrik citra dari baris ke m sampai
pada kolom ke n. Atau dengan kata lain
penjumlahan matrik citra dengan arah baris.
Horizontal projection bertujuan untuk mencari posisi
initial baris yang paling minimum atau global
minima yang ditunjukkan pada Gambar 2.4a yang
ditandai dengan titik merah.. Posisi baris tersebut
digunakan untuk membuat garis pembatas antara
rahang atas dengan rahang bawah.
Pada gambar 2.4b garis initial dari global
minima pada penjumlahan horizontal projection
masih memotong bagian gigi. Oleh karena masih
memotong pada bagian gigi tertentu, maka dibuatlah
garis strips bantuan setinggi 100 dari garis initial
baik dari atas maupun bawah dan lebar 20 dari
kolom pertama sampai kolom terakhir sebagaimana
Gambar 2.5a. Kemudian proses penentuan garis
pemisah pada stripse (20x100) ditentukan dengan
melakukan penjumlahan secara baris pada masing –
masing stripse. Untuk menyatukan digunakanlah
fungsi spline untuk menyatukan garis yang terdapat
pada tiap stripse. Sebagaimana pada gambar 2.5b.
(a)
(b)
Gambar 2.4 (a) Horizontal integral projection, (b) garis initial pemisah
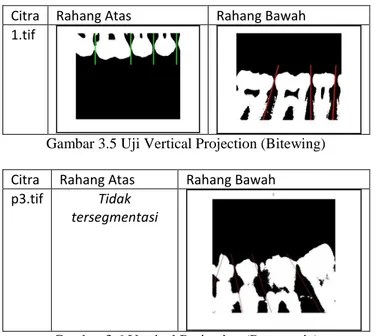
(a)
(b)
Gambar 2.5 (a)Stripbantuan, (b) Garis pemisah rahang atas dan rahang bawah
2.4 VERTICAL PROJECTION
Untuk memisahkan tiap gigi digunakan cara
yang sama dengan pemisahan antara rahang atas
dengan rahang bawah. Pemisahan tiap gigi dapat
dilakukan
dengan
menggunakan
vertical
projection[2]. Dengan rumusan sebagai berikut:
M i
j
i
f
i
V
1)
,
(
)
(
(2.16)
Vertical projection adalah penjumlahan
matrik citra dari kolom ke n sampai baris ke m. Atau
dengan kata lain penjumlahan matik citra dari arah
kolom. Hal yang ingin dicapai pada vertical
projection adalah mencari nilai local minima pada
kurva penjumlahan kolom. Seperti pada Gambar 2.6
dan Gambar 2.7 hasil vertical projection.
Gambar 2.6 Vertical Integral projection
3. HASIL UJI COBA
Citra uji coba yang digunakan pada tugas akhir ini terdiri dari dua macam, yaitu citra Region Of Interest Panoramic dan Bitewing sesuai pada Gambar 3.1 dan Gambar 3.2
a. Citra ROI input
b.Hasil Crop Citra Input
Gambar 3.1 Citra ROI yg digunakanGambar 3.2 Citra input
Untuk data ROI panoramic pada tahap uji coba adalah 5 data. Sedangkan data bitewng digunakan sebanyak 10 data. Tahapan proses yang dilakukan pada kedua data tersebut adalah dengan melakukan proses segmentasi diawali dengan threshold kombinasi dan Adaptive thresholding, untuk memisahkan antara rahang atas dengan rahang bawah digunakan horizontal projection dan untuk memisahkan gigi digunkan vertical projection. 3.1 Uji Horizontal Projection
Uji coba yang dilakukan pada horizontal projection adalah kemampuan dalam melakukan proses pemisahan antara rahang atas dengan rahang bawah. Uji coba dilakukan pada pada 10 citra bitewing dan 5 citra ROI panoramic. Proses yang dilakukan adalah dengan melakukan proses perubahan warna, jika yang ditampilkan adalah rahang atas maka rahang bawah yang dirubah menjadi warna hitam, untuk menampilkan rahang bawah, maka rahang atas yang dirubah menjadi warna hitam. Hasil uji coba dari horizontal projection dapat dilihat pada Gambar 3.3 dan Gambar 3.4
Citra Rahang Atas Rahang Bawah 1.tif
Citra Rahang Atas Rahang Bawah p3.tif Tidak
tersegmentasi
Gambar 3.4 Uji Horizontal Projection (Panoramic)
Hasil dari uji coba secara keseluruhan adalah sebagai berikut:
Tabel 3.1 Hasil Evaluasi Horizontal Projection(bitewing)
Citra Horizontal Projection
R ahang Bawah Rah ang Atas Rah ang benar Akura si per Citra(%) 1 1 1 2 100 2 1 1 2 100 3 1 1 2 100 4 1 1 2 100 5 1 1 2 100 6 1 1 2 100 7 1 1 2 100 8 1 1 2 100 9 1 1 2 100 10 1 1 2 100 Akurasi Rata–Rata 100
Tabel 3.2 Hasil Evaluasi Horizontal Projection(Panoramic) Cit ra Horizontal Projection Raha ng Bawah Raha ng Atas Raha ng benar Akura si per Citra(%) 1 1 1 1 50 2 1 1 2 100 3 1 1 0 0 4 1 1 2 100 5 1 1 1 50
Akurasi Rata –Rata 60
Berdasarkan uji coba pemisahan antara rahang atas denga rahang bawah menggunakan horizontal projection hasil terbaik pada citrabitewing.
3.2 Uji Vertical Projection
Pada uji coba vertical projection juga digunakan citra yang sama seperti pada uji coba horizontal projection. Untuk hasil vertical projection dapat dilihat pada Gambar 3.5 dan Gambar 3.6
Citra Rahang Atas Rahang Bawah 1.tif
Gambar 3.5 Uji Vertical Projection (Bitewing) Citra Rahang Atas Rahang Bawah
p3.tif Tidak tersegmentasi
Gambar 3.6 Vertical Projection (Panoramic) Berdasarkan uji coba vertical proejction hasil terbaik didapatkan pada citra bitewing.
4. KESIMPULAN
Dari hasil uji coba yang didapatkan, didapatkan beberapa simpulan sebagai berikut:
1. Proses segmentasi foreground dan background pada citra sinar-x gigi dapat dilakukan menggunakan threshold kombinasi (gabungan metode Edge Canny & Iterative Thresholding) dan dilanjutkan dengan adaptive threshold. 2. Berdasarkan uji coba, nilai parameter adaptive
thresholding yang optimal adalah 0,9.
3. Proses pemisahan antara rahang atas dengan rahang bawah dapat dilakukan dengan menggunakan algoritma horizontal projection dengan tingkat akurasi untuk bitewing sebesar 100% dan panoramic sebesar 60%
4. Untuk melakukan proses segmentasi pada tiap gigi dapat dilakukan dengan algoritma vertical projection. Hasil akurasi dari vertical projection untuk citra bitewing sebesar 74% dan citra ROI panoramic sebesar 22%
5. Berdasarkan uji coba sistem ini baik digunakan pada citra bitewing.
5. DAFTAR PUSTAKA
[1]. Rafael Gonzales “Digital Image Processing Using Matlab”
[2]. Omamia Nomir, Mohamed, Abdel Mottaleb “Asystem for human identification form X-ray dental radiographs”
[3]. S.Hu, E.A. Huffman, M.Reinhardt, Automatic lung segmentation for accurate quantization of volumetric X-Ray CT images,IEEE Trans. Med. Imaging 20(6) (2001) 490-498
[4]. R.Jain, R.Kasturi, B.G. Schnck, Machine Vision, McGraw-Hill Inc., New York, 1995.