REGISTRASI CITRA NON-ITERATIF DENGAN
PSEUDO-POLAR FOURIER TRANSFORM
Arya Yudhi Wijaya
a,1, Agus Zainal Arifin
a,2, Diana Purwitasari
a,3 a Program Pasca Sarjana Jurusan Teknik Informatika ITS Surabaya 601111[email protected], 2[email protected], 3[email protected]
ABSTRAK
Registrasi citra memainkan peran utama dalam banyak aplikasi pengolahan citra, misalnya: kompresi video, perbaikan kualitas video, scene representation dan analisa citra medis. Registrasi citra adalah proses menemukan kembali titik-titik yang bersesuaian antara citra I1 dengan citra I2 dimana citra I2 adalah citra I1 yang mengalami transformasi geometri antara lain: pergeseran (translasi), rotasi, perbesaran (scaling), pembalikan (fliping) dan penarikan (stretching).
Metode mutahir yang diusulkan dalam registrasi citra pada domain frekuensi adalah registrasi citra untuk estimasi rotasi dengan menggunakan Pseudo-polar Fourier Transform (PPFT). Ide dasar dari metode registrasi ini adalah mengestimasi pergeseran dengan menggunakan phase
correlation. Selanjutnya rotasi diestimasi dengan mereduksi rotasi menjadi peristiwa pergeseran
pada domain log-polar. Registrasi citra untuk mengestimasi rotasi dengan menggunakan PPFT memiliki akurasi yang tinggi. Akan tetapi, akurasi akan dicapai secara optimum apabila dilakukan iterasi dengan batasan error sesuai nilai threshold yang ditentukan sebelumnya.
Penelitian ini akan memperbaiki algoritma registrasi citra untuk estimasi rotasi dengan menggunkan PPFT. Algoritma diperbaiki kompleksitasnya yang semula O(MN2logN) menjadi
O(N2logN) dengan cara menghilangkan proses iterasi tanpa mengurangi akurasi hasil estimasi. Hasil uji coba algoritma yang diusulkan menunjukkan bahwa estimasi rotasi memiliki tingkat kesalahan < 0,2º.
PENDAHULUAN
Registrasi citra memainkan peran utama dalam banyak aplikasi misalnya: kompresi video [1], perbaikan kualitas video [2], scene representation [3] dan analisa citra medis [4]. Registrasi citra adalah proses menemukan kembali titik-titik yang bersesuaian antara citra I1 dengan citra I2 dimana citra I2 adalah citra I1 yang mengalami transformasi geometri antara lain: pergeseran (translasi), rotasi, perbesaran (scaling), pembalikan (fliping) dan penarikan (stretching).
Beberapa metode telah diusulkan untuk melakukan registrasi citra. Registrasi citra pada domain spasial dilakukan dengan cara mencari nilai rata-rata, median, atau ukuran statistika lainnya pada setiap nilai derajat keabuan (grayscale) atau RGB citra [5]. Registrasi citra pada domain spasial bekerja dengan baik ketika diaplikasikan terhadap citra yang memiliki tingkat ketidakteraturan kecil.
Registrasi citra pada domain frekuensi dilakukan dengan melakukan Transformasi Fourier. Metode yang berdasarkan Transformasi Fourier mampu memperkirakan rotasi yang besar, perbesaran, dan pergeseran untuk mendapatkan hasil registrasi yang lebih akurat dibandingkan dengan metode pada domain spasial. Sebagian besar pendekatan yang berdasarkan Transformasi Fourier memanfaatkan shift property Transformasi Fourier yang menyediakan perkiraan pergeseran yang akurat dengan menggunakan phase correlation [6].
Metode mutahir yang diusulkan dalam registrasi citra pada domain frekuensi adalah registrasi citra untuk mengestimasi pergeseran, rotasi dan perbesaran dengan menggunakan Pseudo-polar
Fourier Transform (PPFT) [7]. Ide yang mendasari metode registrasi ini adalah mengestimasi
pergeseran secara akurat dengan menggunakan phase correlation. Pertama kali yang dilakukan adalah melakukkan mapping citra dari domain spasial ke domain frekuensi di atas pseudo-grid. Rotasi diestimasi dengan mengubah basis koordinat kartesian (x,y) ke basis koodinat polar (r,θ). Sudut rotasi adalah pergeseran I2 terhadap I1 pada sumbu θ. Perbesaran diestimasi dengan mengubah basis koordinat kartesian (x,y) ke basis koodinat log-polar (log r, θ) sehingga faktor perbesaran merupakan pergeseran dalam sumbu log r.
Registrasi citra untuk mengestimasi pergeseran, rotasi dan perbesaran dengan menggunakan PPFT memiliki akurasi yang tinggi. Akan tetapi, akurasi akan dicapai secara optimum apabila dilakukan iterasi dengan batasan error sesuai nilai threshold yang ditentukan sebelumnya. Proses iterasi ini yang menjadikan registrasi menjadi boros dalam hal komputasi.
Dalam makalah ini diusulkan suatu metode untuk memperbaiki kompleksitas algoritma estimasi rotasi dengan PPFT dengan cara menghilangkan siklus iterasi tanpa mengurangi akurasi dari hasil estimasi rotasi.
KONSEP REGISTRASI CITRA PADA DOMAIN SPASIAL DAN FREKUENSI Estimasi Pergeseran
Apabila I2 adalah citra I1 yang mengalami pergeseran sebesar (∆x, ∆y) sehingga, ) , ( ) , ( 2 1 x y I x x y y I = +∆ +∆ (1)
maka besar pergeseran I2 terhadap I1 sebesar (∆x, ∆y) dapat ditemukan secara akurat dengan menggunakan phase correlation [8]. Metode estimasi pergeseran dengan menggunakan phase
correlation dapat dilakukan dengan melakukan Transformasi Fourier 2D pada I1 dan I2 sehingga secara berturut-turut menghasilkan ˆI1 dan ˆI2.
} { ˆ 1 1 I I =ℑ ; Iˆ2 =ℑ{I2} (2) Selanjutnya dilakukan penghitungan R sebagaimana formula dibawah ini,
| * ˆ ˆ | * ˆ ˆ 2 1 2 1 I I I I R= (3)
I* adalah complex conjugate dari I. Selanjutnya dicari phase correlation r pada domain spasial
dimana r adalah } {
1 R
r=ℑ− (4)
(∆x, ∆y) dapat ditemukan dengan mencari letak puncak dari dari r yaitu } { max arg ) , ( ) , ( r y x y x = ∆ ∆ (5) Estimasi Rotasi
Apabila I2 adalah citra I1 yang mengalami rotasi sebesar ∆θ, maka ide pertama kali untuk menemukan sudut rotasi ∆θ adalah dengan mengubah sistem koordinat kartesian pada citra I1 dan
I2 menjadi sistem koordinat polar sehingga, ) , ( ) , ( 2 1 r θ =I r θ +∆θ I (6)
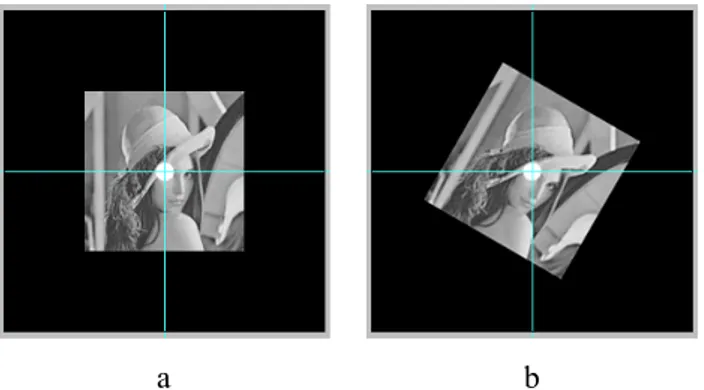
Gambar 1(a) adalah I1 dan gambar 1(b) adalah I2 pada sistem koordinat kartesian. Dilakukan transformasi I1 dan I2 menuju sistem koordinat polar sehingga secara berurutan I1 dan I2 berubah menjadi seperti pada gambar 1(c) dan gambar 1(d). Dapat diamati bahwaI2(r,θ +∆θ) yang ditunjukkan oleh gambar 1(d) merupakan versi pergeseran sepanjang sumbu θ dari I1(r,θ) yang ditunjukkan gambar 1(c). Besar pergeseran sepanjang sumbu θ I2(r,θ +∆θ)terhadap )I1(r,θ dapat ditemukan secara akurat oleh phase correlation. Inti dari cara menemukan ∆θ adalah mereduksi peristiwa rotasi menjadi peristiwa pergeseran sehingga nilai pergeserannya dapat diestimasi dengan menggunakan phase correlation.
Gambar 1 . Ilustrasi estimasi rotasi. (a).Citra
I1 (b).Citra I2 yang merupakan versi rotasi sebesar ∆θ terhadap I1. (c).I1 pada sistem koordinat polar (d).I2 pada sistem koordinat polar
Kendala Estimasi Rotasi pada Domain Spasial
Semua ide pada subbab di atas akan menghasilkan hasil yang akurat apabila I1 dan I2 memiliki pusat rotasi yang sama dimana pusat tersebut telah didefinisikan terlebih dahulu (secara default pusat perbesaran berada di titik tengah citra). Gambar 2 akan menghasilkan estimasi rotasi yang akurat karena memiliki pusat rotasi yang sama. Akan tetapi hasil estimasi rotasi akan tidak akurat
apabila diterapkan pada gambar 3 karena gambar 3(a) dan gambar 3(b) tidak memiliki pusat rotasi yang sama.
a b
Gambar 2. Ilustrasi rotasi dengan pusat yang sama.
(a).Citra I1 (b).Citra I2
a b
Gambar 3. Ilustrasi rotasi dengan pusat berbeda.
(a).Citra I1 (b).Citra I2
Solusi Estimasi Rotasi yang Tidak Sepusat dengan Menggunakan Pseudo-polar Fourier Transform
Kendala yang diuraikan pada subbab di atas terjadi akibat adanya pergeseran dari citra I2 terhadap I1 sehingga pusat rotasi yang seharusnya sama menjadi bergeser. Peristiwa ini seharusnya tidak akan menjadi kendala apabila pengerjaannya dilakukan pada domain frekuensi. Domain frekuensi dapat menjadi solusi dari permasalahan yang terjadi pada subbab sebelumnya karena sifat dari domain frekuensi adalah shift invariant, artinya domain frekuensi tidak dipengaruhi oleh pergeseran.
Berdasakan konsep pemikiran ini, maka diusulkan suatu metode yang mengadopsi prinsip yang dilakukan pada subbab sebelumnya tetapi dilakukan pada domain frekuensi. Domain frekuensi yang diusulkan adalah Psedo-polar Fourier Transform [7].
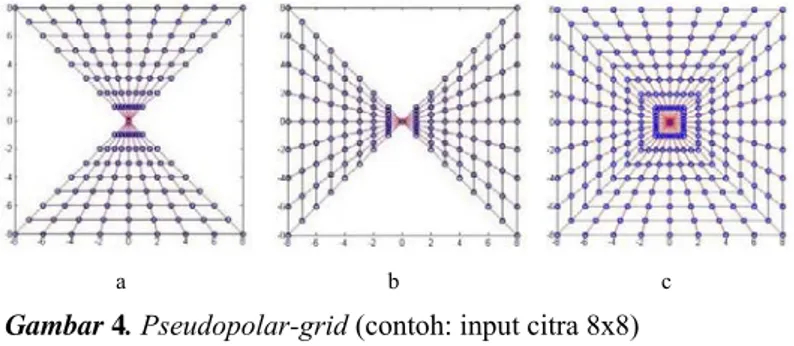
a b c Gambar 4. Pseudopolar-grid (contoh: input citra 8x8)
(a).P1 (b).P2 (c). P = P1UP2
Definisi Pseudopolar Fourier Transform (PPFT)
PPFT adalah Transformasi Fourier 2D dari sebuah citra yang letakkan di atas pseudopolar-grid. Secara lengkap, pseudopolar-grid diberikan oleh himpunan
2 1 P P P≡ ∪ (7) dimana ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ≤ ≤ − ≤ ≤ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛− ≡ k k N l N N k N N l P , 2 2 | , 2 1 (8) ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ − ≤ ≤ − ≤ ≤ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − ≡ k N l N N k N N l k P , 2 2 | 2 , 2 (9)
Untuk mengilustrasikan himpunan P1 dan P2 dapat dilihat pada gambar 4(a) dan gambar 4(b).
Pseudopolar-grid P diilustrasikan pada gambar 4(c). Pada gambar 4(a) dan 4(b), k menyajikan
sesuatu yang disebut sebagai pseudoradius dan l menyajikan sesuatu yang disebut sebagai
pseudoangle. Resolusi dari pseudopolar-grid adalah N+1 dalam bagian angular dan M=2N+1
pada bagian radial. Dengan menggunakan representasi (r,θ), pseudopolar-grid diberikan dengan ) , ( ) , ( 1 1 1 k l rk l P = θ ; ( , ) ( 2, 2), 2 k l rk l P = θ (10) 1 4 2 1 ⎟ + ⎠ ⎞ ⎜ ⎝ ⎛ = N l k rk ; 4 1 2 2 ⎟ + ⎠ ⎞ ⎜ ⎝ ⎛ = N l k rk (11)
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = N l l 2 arctan 2 / 1 π θ ; ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = N l l 2 arctan 2 θ (12)
dimana k=-N,....,N dan l = -N/2,....,N/2. PPFT definisikan sebagai sampel dari Transformasi Fourier yang diberikan pada persamaan (1) di atas pseudopolar-grid P yang diberikan pada persamaan (10). Secara detail, PPFT Iˆj (j=1,2)
pp adalah sebuah transformasi linear, dimana
terdefinisi untuk k=-N,....,N dan l=-N/2,....,N/2, sebagai
∑
− − = ⎥⎦ ⎤ ⎢ ⎣ ⎡ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛− + − = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛− ≡ 1 2 / 2 / , 1 1 2 2 exp ) , ( ˆ , 2 ˆ ˆ N N v u pp pp kv ku N i M v u I I k k N l I I π (13)∑
− − = ⎥⎦ ⎤ ⎢ ⎣ ⎡ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − ≡ 1 2 / 2 / , 2 2 2 2 exp ) , ( ˆ 2 , ˆ ˆ N N v u pp pp kv N i ku M v u I I k N l k I I π (14)dimana Iˆ adalah I pada domain frekuensi.
Sebagaimana dapat dilihat pada gambar 4(c), untuk setiap sudut yang telah ditentukan sebesar
l, sampel dari pseudopolar-grid memiliki space yang sama pada bagian radial. Akan tetapi, space
ini berbeda untuk sudut yang berbeda. Demikian pula, grid memiliki space yang tidak sama dalam bagian angular, tetapi memiliki space kemiringan yang sama. Secara detail,
N l l l pp 2 cot cot ) ( tan 1 1 1 1 ≡ − = ∆ θ θ+ θ (15) N l l l pp 2 cot cot ) ( tan 2 2 1 2 ≡ − = ∆ θ θ+ θ (16) dimana 1 pp θ dan 2 pp
θ diberikan pada persamaan (15).
Properti penting PPFT adalah bahwa transformasi ini memiliki kemampuan invert. Selain itu, PPFT forward dan invert dapat diaplikasikan dengan sebuah komputasi yang cepat dengan bantuan FrFT. Dan yang lebih penting lagi, algoritma ini tidak membutuhkan regriding atau interpolasi sehingga memliki keakuratan yang tinggi.
Gambar 5. Algoritma estimasi rotasi menggunakan PPFT
Fractional Fourier Fourier (FrFT)
Kompleksitas penghitungan PPFT dapat ditekan dengan bantuan FrFT. FrFT adalah algoritma cepat dengan komputasi O(N logN) yang dapat memetakan Transformasi Fourier Diskrit (DFT) di atas beberapa himpunan dari N titik pada sebuah keliling lingkaran [7]. Sehingga FrFT menjadikan kompleksitas komputasi keseluruhan PPFT pada persamaan (13) dan (14) yang semula adalah O(N3) dapat direduksi menjadi O(N2 logN).
Lebih spesifik, diberikan sebuah vektor C dengan panjang N+1, C = (C(u), u = -N/2,...,N/2),
R ∈ α . FrFT didefinisikan sebagai :
∑
− = + = − + 2 / 2 / 1 )( ) ( )exp[ 2 /( 1)] ( N N u N C k C u i ku N Fα πα ; k=−N/2,...,N/2 (17)Algoritma Estimasi Rotasi dengan Menggunakan PPFT
Algoritma estimasi rotasi dengan menggunakan PPFT dapat dilihat pada gambar 5. Penjelasan algoritma pada gambar 5 adalah sebagai berikut:
1) Magnitude PPFT dihitung setelah dilakukan zero-padding pada citra input sehingga memiliki ukuran yang sama
2) ∆θ ditemukan dengan melakukan 1D phase correlation pada sumbu θ di pseudo-polar domain
3) Salah satu dari citra input diputar dengan sudut akumulasi θn
4) Dilakukan iterasi langkah 1) sd. 3) sampai ∆θ lebih kecil dari threshold yang ditentukan yaitu sebesar εθ
5) Ambiguitas dari θ diselesaikan dengan menggunakan 2D phase correlation dimana salah satu citra diputar sebesar θ dan θ+π. Ambiguitas ini disebabkan oleh ambiguitas nilai arctan p yang dapat bernilai θ atau θ+π
6) Pergeseran ditemukan dengan menggunakan 2D phase correlation
ALGORITMA PEMUTUSAN SIKLUS ITERATIF ESTIMASI ROTASI DENGAN PPFT
Algoritma estimasi rotasi dengan menggunakan PPFT yang dapat dilihat pada gambar 5 akan diperbaiki dengan membuang iterasi yang harus dilakukan untuk menemukan sudut rotasi optimum. Perbaikan algoritma yang diusulkan dapat dilihat pada gambar 6 dengan penjelasan sebagai berikut:
1) Magnitude PPFT dihitung setelah dilakukan zero-padding pada citra input sehingga memiliki ukuran yang sama
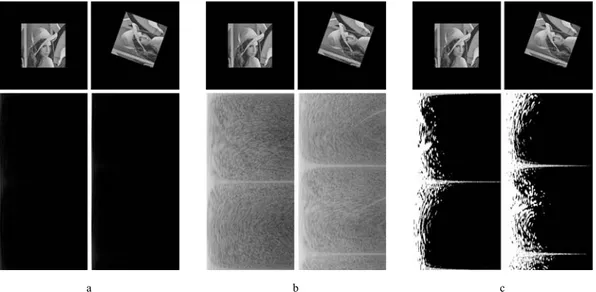
2) Apabila langsung dilakukan 1D phase correlation pada magnitude PPFT maka ∆θ yang ditemukan akan relatif jauh terhadap ∆θ yang sebenarnya karena magnitude PPFT citra I1 dan I2 memiliki jangkauan yang sangat besar. Gambaran hasil pada tahap ini dapat dilihat pada gambar 7(a). Terlihat tidak ada informasi yang signifikan didapatkan diambil dalam representasi ini.
3) Nilai minimum yang didapat pada langkah 2 dapat berupa bilangan desimal antara 0 dan 10 sedangkan nilai maksimum dapat berupa bilangan dengan satuan jutaan. Oleh karena itu dilakukan interpolasi logaritma pada magnitude PPFT I1 dan I2 sehingga jangkauan magtitude tidak terlalu besar. Setelah dilakukan operasi log maka nilai akan diinterpolasikan pada skala grayscale 0-255 . Gambaran hasil pada tahap ini dapat dilihat di gambar 7(b). Terlihat ada informasi yang signifikan didapatkan diambil
dalam representasi ini dimana terlihat bahwa I2 merupakan versi pergeseran I1 pada sumbu θ
Gambar 6. Usulan perbaikan algoritma estimasi rotasi dan
pergeseran menggunakan PPFT
4) Dilakukan thresholding untuk mengubah citra hasil langkah 3) menjadi citra biner. Gambaran hasil pada tahap ini dapat dilihat di gambar 7(c). Terlihat informasi semakin jelas didapatkan bahwa I2 merupakan versi pergeseran I1 pada sumbu θ 5) ∆θ ditemukan dengan melakukan 1D phase correlation pada sumbu θ di pseudo-polar
domain yang telah menjadi citra biner
6) Ambiguitas dari θ diselesaikan dengan menggunakan 2D phase correlation dimana salah satu citra diputar sebesar θ dan θ+π. Ambiguitas ini disebabkan oleh ambiguitas nilai arctan p yang dapat bernilai θ atau θ+π
7) Dilakukan pengambilan q buah nilai θ dari tetangga sudut estimasi untuk melakukan
rotasi yang menghasilkan rotasi paling akurat. Sudut rotasi yang paling akurat adalah yang menghasilkan nilai phase correlation yang maksimum.
8) Pergeseran ditemukan dengan menggunakan 2D phase correlation
a b c Gambar 7. (a) Ilustrasi langkah 2) dalam usulan perbaikan algoritma estimasi rotasi dan pergeseran
menggunakan PPFT. (b) Ilustrasi langkah 3) dalam usulan perbaikan algoritma estimasi rotasi dan pergeseran menggunakan PPFT. (c) Ilustrasi langkah 4) dalam usulan perbaikan algoritma estimasi rotasi dan pergeseran menggunakan PPFT
UJI COBA
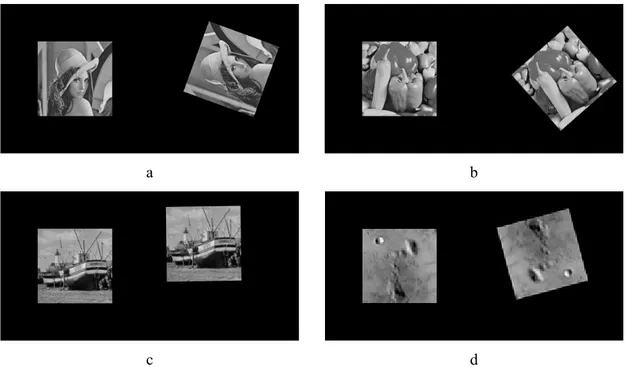
Uji coba dilakukan dengan melakukan registrasi terhadap 4 pasang citra berbeda dimana masing-masing pasang memiliki sudut rotasi relatif sesamanya. Pasangan citra uji coba dapat dilihat pada gambar 8. Sudut rotasi sebenarnya pada masing-masing pasang citra telah diketahui sebelumnya yaitu: 70° pada pasangan gambar 8(a), 41,3° pada pasangan gambar 8(b), 0,8° pada pasangan gambar 8(c) dan 195° pada pasangan gambar 8(d). Sudut rotasi tersebut diambil untuk mewakili semua kemungkinan rotasi yang terjadi. Pasangan gambar 8(a) diharapkan mewakili rotasi pada kondisi umum dengan sudut rotasi berupa bilangan bulat di kuadran I. Selanjutnya pasangan gambar 8(b) diharapkan mewakili rotasi pada kondisi umum dengan sudut rotasi berupa bilangan desimal di kuadran I. Kemudian pasangan gambar 8(c) diharapkan mewakili rotasi pada kondisi umum dengan sudut rotasi yang kecil yaitu ±1° dimana pada umumnya sudutnya
merupakan bilangan desimal. Terakhir, pasangan gambar 8(d) diharapkan mewakili rotasi pada kondisi umum dengan sudut rotasi > 90°.
a b
c d Gambar 8. Citra sampel uji coba estimasi rotasi dengan algoritma yang diusulkan
Tabel 1. Hasil uji coba estimasi rotasi dengan algoritma pemutusan rantai iteratif
Pasangan
Citra Rotasi Estimasi Rotasi Error
a 70° 69,84° 0,16°
b 41,3° 41,18° 0,12°
c 0,8° 0,89° 0,09°
d 195° 194,88° 0,12°
Hasil uji coba dapat diamati pada tabel 1. Hasil pada tabel 1 menunjukkan bahwa dari 4 pasang gambar yang diuji coba pada gambar 8 dengan metode yang diusulkan memiliki nilai kesalahan yang relatif kecil yaitu dibawah 0,2°.
KESIMPULAN
Algoritma yang diusulkan mampu memutus siklus iterasi dari algoritma registrasi citra untuk estimasi rotasi dengan menggunakan PPFT. Algoritma registrasi citra dengan PPFT yang sebelumnya memiliki kompleksitas komputasi O(MN2 logN) dimana M menunjukkan banyak iterasi dan N menyatakan ukuran citra input ukuran NxN dapat direduksi menjadi O(N2 logN) dikarenakan iterasi sebanyak M bernilai 1. Ditinjau dari segi akurasi, hasil registrasi citra dengan metode yang diusulkan memiliki tingkat akurasi yang signifikan yang didapatkan secara otonom tanpa pendefinisian nilai threshold sebelumnya. Berbeda dengan metode registrasi PPFT yang mengggunakan iterasi, akurasi didefinisikan sebagai nilai threshold dan iterasi akan berhenti ketika nilai estimasi rotasi mencapai nilai threshold yang ditentukan.
REFERENSI
[1]. Dufaux, F. dan Konrad, J., “Efficient, Robust, and Fast Global Motion Estimation for Video Coding”, IEEE Transaction on Image Processing, Vol. 9, No. 3, hal. 497-501, 2000.
[2]. Irani, M. dan Peleg, S., “Motion Analysis for Image Enhancement: Resolution, Occlusion, and Transparency”, J. Visual Comm. and Image Representation, vol. 4, No. 4, hal. 324-335, 1993.
[3]. Keller Yosi dkk., “Pseudopolar-Based Estimation of Large Translations, Rotation”, IEEE Transactions on Image Processing, Vol. 14, No.1, Hal. 12-22, 2005.
[4]. Kuglin, C.D. and Hines, D.C., “The phase correlation image alignment method,” in Proc. IEEE Conf. Cybernetics and Society, Hal. 163–165, 1975.
[5]. Mann, S. and Picard, R., “Virtual Bellows: Constructing High Quality Stills from Video”, Proc. IEEE Int’l Conf. Image Processing, hal 363-367, 1994.
[6]. Reddy, S. and Chatterji, B.N, “An FFT-Based Technique for Translation, Rotation, and Scale-Invariant Image Registration”, IEEE Trans. Image Processing, Vol. 3, No. 8, hal. 1266-1270, 1996.
[7]. Wan, Rui dan Li, Minglu, “An Overview of Medical Image Registration”, Fifth International Conference on Computational Intelligence and Multimedia Applications (ICCIMA'03), hal. 385, 2003.
[8]. Wolberg, G. and Zokai, S., “Robust image registration using log-polar transform”, Proc. IEEE Int. Conf. Image Processing, Vancouver, BC, Canada, 2000.