PERANCANGAN, PENALAAN PARAMETER KONTROL
PID, DAN SIMULASI RESPON SISTEM KONTROL
UMPAN BALIK LOOP TUNGGAL DARI SEBUAH
PROSES
Edison Ambarita1
ABSTRACT
The design of automatic control system of a process is highly related with its industrial process, sensors, transmitters, control valves, and controllers. Therefore, it is necessary to make a linear transfer function for each component, and also to recognize and to determine the important parameters to design automatic control system, which is called steady state gain, and the time constant parameters. Characteristic equation can be obtained by way of drawing all block diagrams that form single loop feedback control system. From the characteristic equation, we can do some tests with the direct substitution method. These tests are needed to determine the stability and the stability limit of the single control loop process. By that method can be determined the tuning value and chosen the loop control parameters in that loop’s characteristic equation. The roots of characteristics equation of the transfer function loop control system are calculated by Matlab program. Then, the coefficients of the partial fraction expansion are determined by applying Laplace transformation inversion in time dimension. The responds of changes due to the disturbance and the changes of the set point can be drawn through the respond curve of output variable of the process with the help of simulation program.
Keywords: modeling process, deviation variable, loop characteristic equation, tuning parameters, PID loop and simulation.
ABSTRAK
Perancangan sistem kontrol otomatis dari sebuah proses sangat berkaitan dengan karakteristik dinamis dari proses industri tersebut, sensor-sensor, transmiter, valve control, dan kontrol itu. Untuk itu, dibutuhkan linearisasi fungsi alih masing-masing komponen dan pengenalan serta penentuan parameter yang penting untuk merancang sistem kontrol otomatis yang disebut parameter steady state gain, dan konstanta waktu. Persamaan karakteristik dapat diperoleh dengan menggambarkan seluruh blok diagram yang membentuk sistem kontrol umpan balik untaian tertutup tunggal. Dari persamaan karakteristik dapat dilakukan pengujian dengan metode substitusi langsung, untuk menentukan kestabilan dan batas kestabilan dari rangkaian untaian tertutup proses tersebut. Penentuan nilai penalaan dan pemilihan parameter kontrol loop yang ada pada persamaan karakteristik dari loop tersebut dapat ditentukan dari metoda tersebut. Akar-akar persamaan karakteristik fungsi alih loop tersebut dihitung dengan bantuan program matlab. Setelah itu koefisien-koefisien ekspansi fraksi parsial ditentukan besarnya dengan bantuan inversi transformasi Laplace kedalam dimensi waktu. Respon atas perubahan akibat gangguan dan perubahan dari set point dapat digambarkan pada kurva respon variabel keluaran proses tersebut dengan bantuan program simulasi.
Kata kunci: proses pemodelan, variabel deviasi, parameter, persamaan karakteristik loop, penalaan parameter, PID loop dan simulasi.
1
Universitas Kristen Indonesia, Jalan Mayjend Sutoyo, Jakarta 13630, INDONESIA, Tel.: +62-21-8009190, Fax.: +62-21-8093948
1. PENDAHULUAN
Di dalam proses industri tidak statis, secara alamiah justru sangat dinamis berubah secara berkelanjutan, dinamika proses yang selalu terjadi ini menimbulkan gangguan (disturbance) yang berakibat adanya penyimpangan besaran dari variabel yang dikontrol pada proses tersebut, jika tidak dilakukan tindakan atau aksi maka kepentingan variabel proses yang berhubungan dengan keamanan, kualitas produksi dan batas-batas dari besaran produksi tidak mencapai harapan dari tujuan kondisi perancangan.
Secara umum, sebuah proses industri dikenal variabel masukan dan variabel keluaran sebuah proses, misalnya seperti temperatur (suhu), tekanan, aliran, komposisi, level, dan lain sebagainya, besarnya variabel proses yang dikontrol dapat terjaga pada nilai titik operasi proses (set point).
Karena kedinamisan proses yang disebutkan itu menimbulkan gangguan, maka dibutuhkan sistem pengendali atau control yang berfungsi guna mengawasi atau mengedalikan variabel –variabel yang harus dikendalikan atau dikontrol secara berkesinambungan dan otomatis dimana dalam Ambarita (2007) masalah ini tidak dibahas.
Salah satu sistem kendali otomatis atau kontrol yang banyak digunakan adalah sistem kendali umpan balik untain tetutup tunggal (single close loop feedback control system), kontrol secara Proporsional, Integral dan Difrensial ( Controller PID) dengan parameter control Gain Kc,waktu integra
τ
idanwaktu diferensial
τ
D.Prinsip kerja control PID adalah
pengendalian penyimpangan variabel yang dikontrol, yaitu perbedaan hasil pengukuran variabel yang dikontrol dengan set point,yang menghasilkan penyimpangan atau error yang dapat mengganggu kestabilan proses, untuk itu
dibutuhkan aksi untuk menjaga
kestabilan proses, dengan penetuan nilai besaran penalaan parameter Kc,
τ
i danD
τ
kontrol PID sistem kontrol umpan balik untaian tertutup tunggal (determine value and tuning parameters single close loop feedback control system).Untuk kepentingan analisa kontrol loop umpan balik tersebut di butuhkan blok diagram semua komponen dari sistem kontrol proses yang bertujuan
untuk menentukan persamaan
karakteristik dari fungsi alih sistem kontrol proses tersebut. Pada persamaan karakteristik dilakukan pengujian untuk menentukan stabil atau tidak rangkaian (untaian) loop tersebut.
Metode substitusi langsung dapat dilakukan untuk mendapatkan nilai batas-batas kestabilan dari nilai
parameter-parameter pengontrol
(controller) pada persamaan
karakteristik loop tersebut.
Dengan memilih metode yang dibahas pada tulisan ini untuk menentukan besarnya nilai penalaan yang tepat dari nilai parameter kontrol PID tersebut kestabilan proses dapat dicapai sesuai dengan rancangan.
2. PROSES DAN KONTROL 2.1. Proses
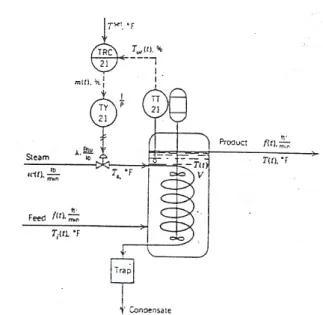
Sebuah proses continuous stirred tank heater yang menggunakan aliran panas, tangki dipanaskan melalui kondensasi uap air pada kumparan atau
koil ( coil ) di dalam tangki sehingga panas tersebut mengalir melalui cairan bahan dan dengan batuan alat pencampur untuk mecapurkan komponen-komponen bahan bahan sampai tercapai komposisi bahan tercampur merata, untuk itu dibutuhkan temperatur yang konstan pada nilai tertentu agar kualitas produk proses tersebut terejaga dengan baik. Proses ini tidak menginginkan kondisi temperatur yang ketinggian karena cenderung merusak campuran produk dan apabila temperatur kerendahan mengakibatkan campuran bahan tidak merata, oleh karena itu kontrol temperatur pada nilai tertentu penting dipertahankan sesuai dengan nilai yang diinginkan.
2.2. Kontrol
Kontrol (controller) proposional, integral dan difrensial (PID) merupakan pengontrol yang banyak digunakan untuk mengkontrol variabel keluaran suatu proses, untuk proses tersebut diatas yang dikontrol adalah temperatur yang merupakan variabel keluaran yang dikontrol (controlled variable). Ada empat elemen komponen dasar untuk semua kontrol sistem yaitu sensor (elemen primer), trasmitter (elemen sekunder), control (controlled) sebagai otak sistem kontrol dan elemen kontrol akhir misalnya salah satu contoh kontrol
valve. Untuk dapat menurunkan
persamaan-persamaan matematis dan diagaram blok lengkap, funsi alih ,persamaan karakteristik serta seleksi
dan pemilihan elemen kontrol,
membutuhkan data dan informasi lengkap dari sistem proses tersebut, proses yang di bahas dalam tulisan ini adalah proses continuous stirred tank heater.
Proses continuous stirred tank heater dapat di ilustrasikan seperti Gambar 1 berikut ini.
Gambar 1. Diagram Proses Continuous Stirred
Tank Heater.
3. Pemodelan Dan Linearisasi
Pendekatan yang dilakukan untuk penurunan persamaan matematis di dalam proses itu berlangsung selalu diikuti sifat sifat dinamika yang terjadi di dalam tangki (tank), kontrol valve, sensor-transmitter dan pengontrol (controller) sehinggga persamaan yang dimodelkan harus dilinearisasi dan kemudian dilakukan trasformasi Laplace untuk dapat dilakukan penggambaran diagram blok untaian tertutup (close loop) secara lengkap.
3.1. Metode Linierisasi Persamaan
Secara umum dapat diturunkan metode linearisasi untuk persamaan non linear persamaan dengan sejumlah n variabel x1,x2,...,xn dilinearisasi dengan formula (lihat Luyben, 1998):
) ( .... ) ( ) ( ) ,...., , ( ) ,...., , ( 2 2 2 1 1 1 2 1 2 1 n n n n x x x f x x x f x x x f x x x f x x x f − ∂ ∂ + + − ∂ ∂ + − ∂ ∂ + = & & & & & & & & & + = f(x1,x2,....,xn) ( ) 1 k n k k k x x x f − ∂ ∂
∑
= …(1) dimana tanda n x f ∂ ∂ merupakanmasing-masing turunan pertama terhadap )
,...., ,
(x1 x2 xn tanda bar (strip) diatas variabel menandakan besaran pada keadaan steady state.
3.2. Model Proses
Model persamaan matematis proses dari continuous stirred tank heater yang
didefinisikan dengan hukum
keseimbangan energi (energy balance) di dalam tangki proses dengan persamaan:
……….(2) dimana:
• f(t) adalah aliran (flow) masuk dan keluar bahan produk,
min 3 ft
• ρadalah densitas bahan , 3 ft lb • Cpadalah kapasitas panas bahan,
3 ft Btu
• Ti(t) adalah temperatur masukan, F° • T(t) adalah temperatur keluaran, F° • Ts(t) adalah temperatur uap air, F°
• A adalah luas trasfer panas, 2 ft
Persamaan keseimbangan energi pada kumparan (coil) di definisikan dengan persamaan dibawah ini:
[
( ) ( )]
) ( ) ( t T t T UA t w dt t dT C s s M = λ− − …..(3) dimana:• w(t) adalah rate aliran uap air, lb/min
• CMadalah kapasitas panas dari coil
metal, Btu/ F°
3.3. Kontrol Valve
Persamaan dari kontrol valve dengan drop tekanan konstan dapat di tulis seperti dibawah ini :
1 ) ( max
)
(
=
vpt −W
t
w
α
…..(4) dimana:• Wmaxadalah aliran maksimum
melalui valve, lb/min
•
α
adalah kesamaan persentasi rangeblitas parameter• vp adalah posisi valve pada skala 0 sampai dengan 1
Perubahan bervariasi pada tekanan drop permukaan atau penampang valve dengan temperatur kondensasi uap air dapat di abaikan dan valve actuator dapat di modelkan dengan persamaan a first order lag berikut ini:
( ) 1 100 / 1 ) ( M s s s VP v + = τ ………(5)
dimanaM(s)adalah signal keluaran kontrol (controller) dalam persen(%).
[
( ) ( )]
( ) ( ) ) ( ) ( ) ( t T C t f t T t T UA t T C t f dt t dT C V p s i p pρ
ρ
ρ
− − + =3.4. Sensor- Transmitter
Sensor-Transmitter dapat di reprentasikan dengan first –order lag berikut ini yaitu persamaan:
1 ) ( ) ( + = s K s T s T t t or
τ
………(6)dimana Tor(s) adalah transformasi
Laplace dari signal keluaran
teransmitter, %
3.5. Kontrol Umpan Balik
Kontrol umpan balik (feedback controller) PID dengan fungsi alih dituliskan dengan persamaan berikut:
) ( ) ( ) ( ) 1 1 ( ) ( s T s R s M s s K s G or d i c c − = + + = τ τ ………..(7)
dimana Kcadalah gain kontrol,τiwaktu integral dan
τ
Dwaktu diferensial.4. LINEARISASI DAN TRANS-FORMASI LAPLACE
Proses linearisasi dan transformasi Lapace akan mengikuti Craft et al. (1992). Dari persamaan (2) dapat diturunkan:
[
]
) ( ) ( ) ( ) ( ) ( ) ( ) ( t T C t f t T t T UA t T C t f dt t dT C V p s i p p ρ ρ ρ − − + = Linearisasinya adalah i p i i p p i pT t f CT C f T T CT f f C t f()ρ ()= ρ +ρ ( − )+ρ ( − )[
]
[
]
) ( ) ( ) ( ) ( T T UA T T UA T T UA t T t T UA s s s s s − − − + − = − ) ( ) ( ) ( ) ( f f T C T T f C T C f t T C t f p p p p & − − − − − = − ρ ρ ρ ρnilai steady state nya adalah
0= f
ρ
CpT +UA(Ts −T)− fρ
CpTHasil linearisasi persamaan diatas diperoleh persamaan penyimpangan variabel seperti persamaan dibawah ini:
) ( ) ( ) ( ) ( ) ( ) ( t T UA f C t UAT t F T C t T f C dt t dT C V p s p i p p + − + + =
ρ
ρ
ρ
ρ
Transformasi Laplace persamaan di atas ini adalah : ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( s T UA f C UA s F UA f C T C s T UA f C f C s T s sT UA f C C V s p p p i p p p p + + + + + = + + ρ ρ ρ ρ ρ ρ ρ ) ( ) ( ) ( ) ( ) 1 (τs+ T s =KiT s +KFF s +KsTs s ) ( 1 ) ( 1 ) ( 1 ) ( T s s K s F s K s T s K s T s s F i i + + + + + = τ τ τ .….(8)
persamaan diatas disebut persamaan fungsi alih proses.
Linearisasi pesamaan (3) berikut ini:
[
( ) ( )]
) ( ) ( t T t T UA t w dt t dT C s s M = λ− −linearisasi bentuk dari
)
(
)
(
t
w
w
w
w
λ
=
λ
+
λ
−
[
]
− − − + − − = − − ) ( ) ( ) ( ) ( ) ( T T UA T T UA T T UA t T s T UA s s s s0=λw −UA (Ts − T )
Persamaan penyimpangan variabel coil ) ( ) ( ) ( ) ( ( t UAT t UAT t W dt t dT C s s M =λ + − ) ( ) ( ) ( ) ( t T t W UA t T dt t dT UA C s s M + = λ +
Transformasi Laplace persamaan penyimpangan variable koil (coil) diatas adalah: ) ( ) ( ) ( ) 1 (
τ
s+ Ts s = KWW s +T s Persamaan fungsi alih coil:) ( 1 1 ) ( 1 ) ( T s s s W s K s T W s + + + =
τ
τ
.…..(9)Kombinasi persamaan (8) dan (9) diperoleh persamaan berikut ini:
( )
( )
( )
( )
( )
...(10) 1 1 1 1 1 1 + + + + + + + + = s W s T K s T s T s K s T s K s F s K s T c W c s i i Fτ
τ
τ
dimana: ) ( C f UA C V p p + =ρ
ρ
τ
UA CM c =τ
; ) ( C f UA f C K p p i + =ρ
ρ
UA KW =λ
; ) ( C f UA T C K p p F + =ρ
ρ
) ( C f UA UA K p s + =ρ
τ
danτ
cadalah konstanta waktu dan ws F K danK
K K
i,, , adalah gain parameter
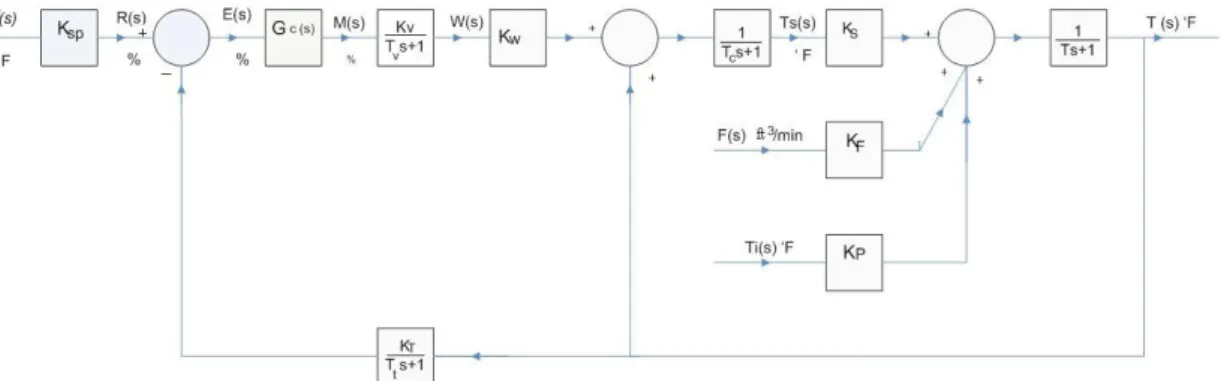
Dari persamaan (8) & (9) diatas diperoleh persamaan (10) kemudian dapat diturunkan diagram lengkap kotrol umpan balik loop tertutup kontrol temperatur seperti Gambar 2. Fungsi alih lingkar (loop) tertutup dari gambar 3 adalah seperti di bawah ini
( )
( )
( ) ( ) ( )
( ) ( ) ( ) ( )
s G s G s G s H s G s G s G K s T s T s v c s v c sp set + = 1( )
( )
( )
( ) ( ) ( ) ( )
s G s G s G s H s G s F s T s v c F + = 1( )
( )
( )
( ) ( ) ( ) ( )
sG s G s G s H s G s T s T s v c i i + = 1 dimana:( )
1 + = s K s G v v vτ
dan( )
= s+1 K s H t vτ
Persamaan Karakteristik dari loop tersebut adalah:
(
1)(
1)
0 1 1 1 1 1 3 = − + + + + + + + K s K K s K s s K s K c s s w v v D t c t tτ
τ
τ
τ
τ
τ
……….(12)5. DATA RANCANGAN PRO-SES DAN KONTROL
Untuk data rancangan proses dan kontrol yang dipergunakan dalam studi ini diambil dari Smith dan Corripio (1995).
Gambar 2. Diagram Blok Umpan Balik Loop Tertutup Kontrol Temperatur
Gambar 3. Diagram Blok Kontrol Loop Tertutup Kontrol Temperatur
5.1. Proses
Bahan masukan proses memiliki densitas p 68,0 lb/ft3 , dan kapasitas panas Cp 0,80 Btu/lb oF. Volume V
cairan dalam reactor dijaga konstan pada 120 ft3 . Gulungan (coil) terdiri dari 205 ft of 4-in, pipa baja schedule 40, timbangan (weighing) 10,8 lb/ft dengan kapasitas panas 0,12 Btu/lb 0F dan sebuah diameter luar 4,500 in. Koefisien transfer panas U secara keseluruhan, berdasarkan area di luar coil, telah diestimasi sebesar 2,1 Btu/min ft2 0F. Uap yang tersedia menjadi jenuh pada
tekanan 30 psia; dapat diasumsikan bahwa panas laten dari kondensasi λ adalah konstan pada 966 Btu/lb.
5.2. Kondisi Rancangan
Aliran masukan f pada kondisi yang dirancang adalah 15 ft3 /min dan temperaturnya Ti adalah 1000 F. Isi dari
tangki harus dijaga pada temperature T 1500 F. Kemungkinan gangguan (disturbances) yang ada adalah perubahan dalam tingkat masukan (feed rate) dan temperatur.
5.3. Sensor Temperatur dan Transmitter
Sensor temperature memiliki interval kalibrasi dari 100 hingga 2000 F dan konstanta waktu
τ
t 0.75 menit.6. NILAI NUMERIK DATA RAN-CANGAN PROSES DAN KON-TROL
Dengan dimasukkannya semua
besaran parameter dari gain, parameter konstanta waktu secara lengkap maka diperoleh koefisien dari fungsi polynomial persamaan karaktrristik dari loop F K Ksp = t =1,0%°
τ
t =0,75min min 20 , 0 = vτ
Dari data deskripsi kumparan, diperoleh:
(
)
2 5 , 241 12 4500 205ft ft ft A = = π(
)
F Btu F lb Btu ft lb ft CM ° = ° = / 7 , 265 12 , 0 8 , 10 205(
)(
)(
)
( )(
2,1 241,5) ( )( )(
15 68 0,80)
4,93min 80 , 0 0 , 68 120 = + = τ( )(
2,1 241,5)
0,524min 7 , 265 = = c τ( )(
)(
)
( )(
) ( )( )(
)
(
/min)
/ 06 , 2 80 , 0 68 15 5 , 241 1 , 2 150 100 80 , 0 68 3 ft F KF ° − = + − =( )( )(
)
( )(
) ( )( )(
)
F F Ki ° ° = + = / 617 , 0 80 , 0 68 15 5 , 241 1 , 2 80 , 0 68 15( )(
)
( )(
) ( )( )(
)
F F KS ° ° = + = / 383 , 0 80 , 0 68 15 5 , 241 1 , 2 5 , 241 1 , 2( )(
2.1 241.5)
1,905 /(
/min)
966 lb F Kw = = °Ukuran valve kontrol yang digunakan dari fakta dengan kondisi rancangan pada keadaan steady state:
(
−)
− =0 +UAT T f C T T C fρ
ρ i Sρ
ρ
(
−)
=0 −UAT T Wλ s( )( )(
)(
)
( )(
)
F TS ° = + − = 230 150 5 , 241 1 , 2 100 150 80 , 0 68 15( )(
)(
)
min / 2 , 42 966 150 230 5 , 241 1 , 2 lb W = − =(
)(
)
% min / 652 , 1 100 50 ln 2 , 42 − = = lbm KτDan Wmax =2W =84,4lb/min
Dengan semua besaran
tersebut,maka persamaan karakteristik menjadi:
(
)(
)
(
)(
)
( )
1,0 1(
1,652)(
1,905)(
0,383)
0 383 , 0 1 524 , 0 1 93 , 4 1 20 , 0 1 75 , 0 = + + − + + + + τ s K s s s s c(
)
(
)
0 / 205 , 1 205 , 1 617 , 0 205 , 1 043 ,. 859 , 7 272 , 3 387 , 0 2 3 4 5 = + + + + + + + t c C D c K s K s K s s s τ τ( )
1 2 ... ( ) 2 1c bc bc inputitems b t c rn n r r + + + + = ′ ′ ′Kita turunkan persamaan karak-teristik berikut ini untuk heater:
(
)
(
)
0 / 205 , 1 205 , 1 617 , 0 205 , 1 043 , 6 859 , 7 272 , 3 387 , 0 2 3 4 5 = + + + + + + + t c C D c K s K s K s s sτ
τ
Pertama-tama menggunakan metoda subtitusi untuk menghitung ultimate gain dan periode osilasi untuk kontrol
proposional. Dengan =0 1 =0
i D dan
τ
τ ,
persamaan karakteristik direduksi menjadi:
0
205
,
1
617
,
0
043
,
6
859
,
7
272
,
3
387
,
0
5 3 2=
+
+
+
+
+
cK
s
s
s
s
..…(13) Kemudian kita substitusikan s=iωu dancu c K
K = diperoleh persamaan
berikutnya setelah disederhanakan:
0 043 , 6 272 , 3 3+ = − ωu ωu 0 205 , 1 617 , 0 859 , 7 387 , 0 ωu4 − ωu2 + + Kcu =
Dari sini dapat diperoleh frekuensi
u
w dan gain ultimateKcu:
min / 359 , 1 272 . 3 043 . 6 rad u = =
ω
(
)
% / % 44 , 10 617 , 0 859 , 7 387 , 0 205 , 1 1 − 4+ 2− = u u cu K ω ω Periode ultimate: min 62 , 4 359 , 1 2 = =π
u TSeleksi penentuan besar penalaan parameter dengan metode Ziegler Nichols dengan quarter decay ratio formula response of PID controller loop adalah:
%
/
%
14
,
6
7
,
1
/
=
=
cu CK
K
min 31 , 2 2 / 1 =Tu = τ min 58 , 0 8 / = = u D T τDengan penalaan (tuning) parameter kontrol loop dengan nilai diatas persamaan karakteristik menjadi:
) 14 ..( ... 0 20 , 3 017 , 8 43 , 10 859 , 7 272 , 3 387 , 0 5 4 3 2 = + + + + + s s s s s
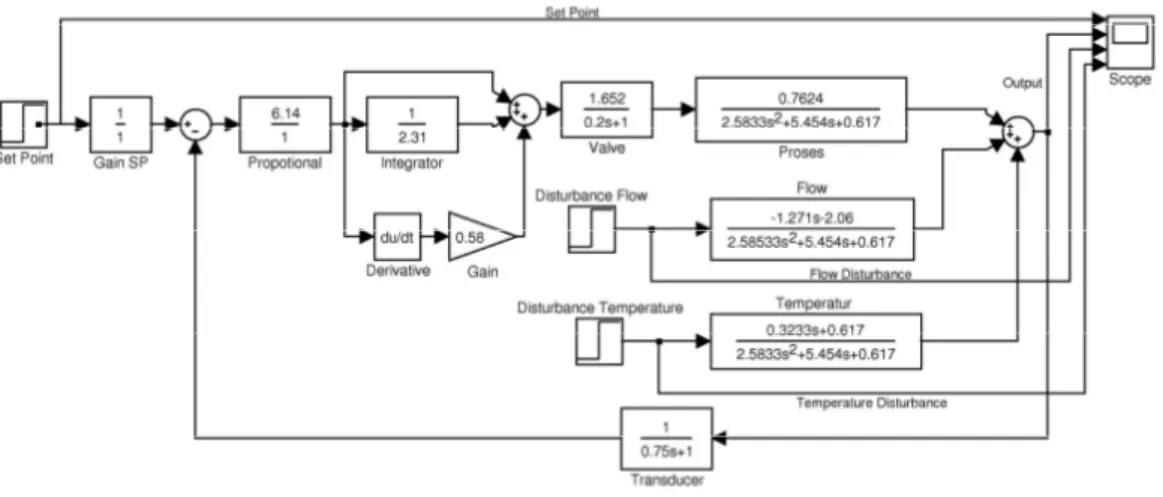
Dengan bantuan program simulik dan program Matlab blok diagram sistem proses kontrol dan simulasi kurva respon variabel keluaran yang di kontrol atas perubahan set point dan gangguan tejadi pada variabel masukan ditampilkan pada gambar simulasi berikut .
7. SIMULASI
Dengan bantuan program Simulink program matlab seri 6.5 dapat ditampilkan simulasi sistem kontrol proses PID umpan balik loop tertutup tunggal seperti tampilan pada Gambar 4.
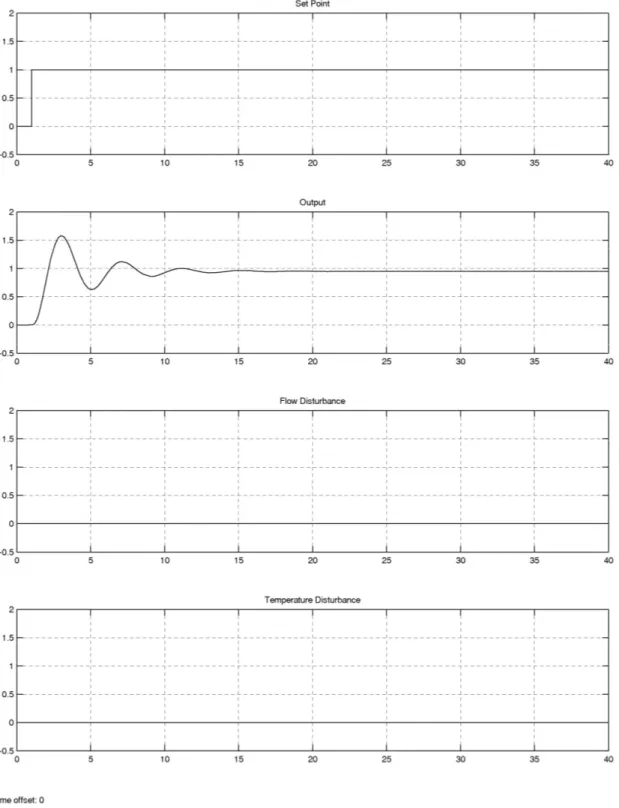
Hasil simulasi terlihat pada gambar 5, gambar 6 dan gambar 7. Kurva respon temperatur keluaran atas perubahan pada set point unit langkah (unit step ) pada menit ke 18 atau 18 menit setelah perubahan pada set point sistem kontrol proses menuju stabil mantap (lihat Gambar 5).
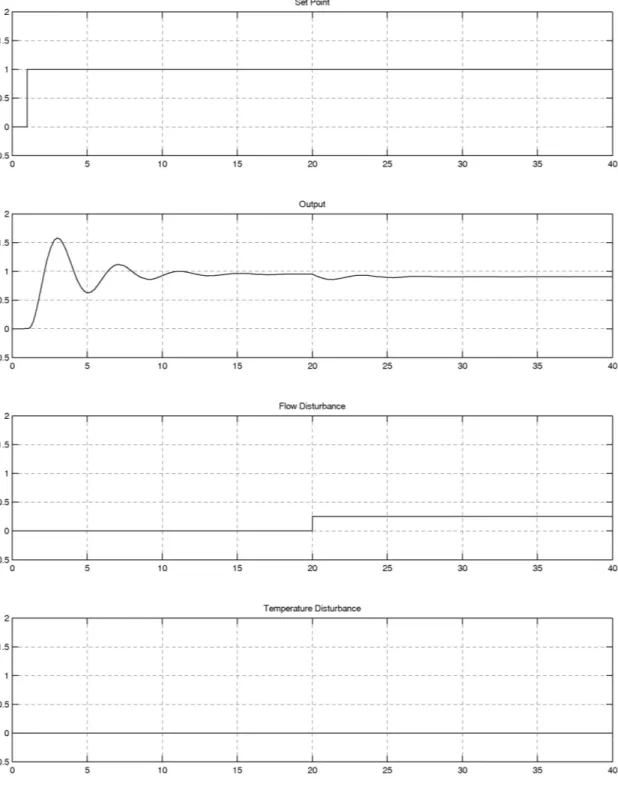
Kurva respon temperatur keluaran atas perubahan pada set point dan gangguan (disturbance) pada aliran
masukan (feed flow) Fiterjadi ,pada
menit ke duapuluh, tujuh menit kemudian sistem kontrol proses stabil mantap (lihat Gambar 6).
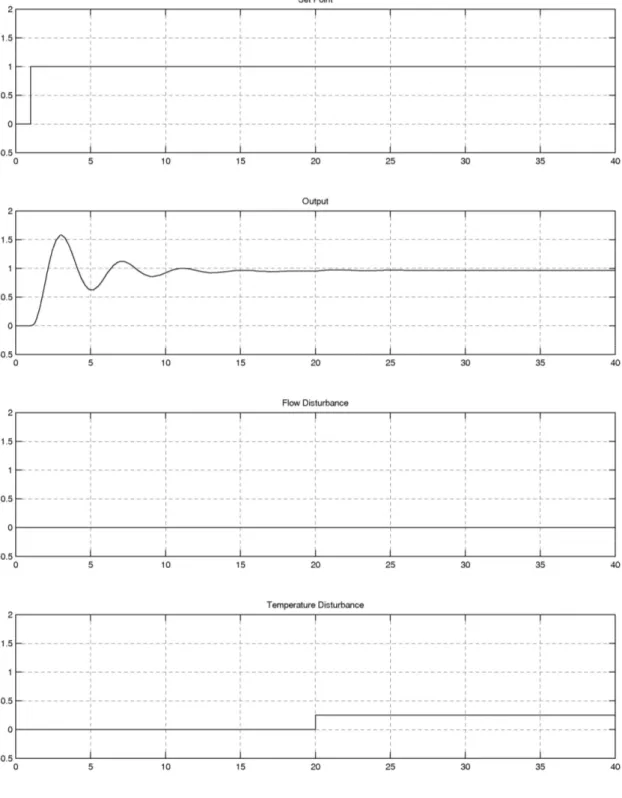
Kurva respon temperatur keluaran atas perubahan pada set point dan
gangguan (disturbance) pada temperatur masukan titerjadi pada menit ke duapuluh , pada menit ke duapuluh empat atau empat (4) menit kemudian sistem kontrol proses stabil mantap (lihat Gambar 7).
Gambar 4. Blok Diagram Sistem Kontrol Proses Loop Heat Exchanger
8. KESIMPULAN
Kesimpulan atas perancangan, penalaan parameter control PID simulasi respon sistem kontrol umpan balik loop tertutup tunggal dari proses kontrol temperatur dari continuous stirred tank heater memberikan kesimpulan sebagai berikut:
1. Besaran penalaan parameter kontrol PID yang diperoleh gain proporsio-nal KCsebesar 6,14 %/%;
parame-ter waktu integrasi τi sebesar 2,31
menit dan parameter waktu
diferesial
τ
d sebesar 0,58 menit. 2. Kurva respon temperatur keluaranatas perubahan pada set point unit langkah (unit step ) pada menit ke 18 atau 18 menit setelah perubahan
pada set point sistem kontrol proses menuju stabil mantap
3. Kurva respon temperatur keluaran atas perubahan pada set point dan gangguan (disturbance) pada aliran masukan (feed flow) Fiterjadi, pada menit ke duapuluh, tujuh menit kemudian sistem kontrol proses stabil mantap
4. Kurva respon temperatur keluaran atas perubahan pada set point dan gangguan (disturbance) pada tempe- ratur masukan ti terjadi pada menit ke duapuluh , pada menit ke duapuluh empat atau empat (4) menit kemudian sistem kontrol proses stabil mantap
Gambar 5. Kurva Respon dari Kontrol Temperatur atas Perubahan pada Set Point Unit Langkah Tanpa Disturbance
Gambar 6. Kurva Respon dari Kontrol Temperatur atas Perubahan pada Set point Unit Langkah dengan Disturbance 20% pada Aliran (flow) Masukan
Gambar 7. Kurva Respon dari Kontrol Temperatur atas Perubahan pada Set Point Unit Langkah dengan Disturbance 20% pada Temperatur Masukan.
DAFTAR PUSTAKA
Ambarita, E. (2007), “Pemodelan dan
Analisa Proses Dengan
Transformasi Laplace,” Jurnal Sains dan Teknologi EMAS, Vol. 17 (1), 2007.
Craft.A., Davidson. R. dan Hargreaves (1992), Engineering
Mathe-matics. A Modern
Foundation Electronic, Electrical
and Control Engineers, Addison-Wesley Publishing Company Inc.
Luyben.W.L. (1998), Process Modeling, Simulation, and Control for Chemical Engineers, Mc Graw-Hill Book Co, 1998
Smith, C.A. dan Corripio, A.B. (1995)
Principles and Practice of Automatic Process Control, Inc. John Wiley P Sons Inc.