Seminar Tesis Bidang Keahlian Jaringan Cerdas Multimedia (Teknologi Permainan) Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember, Surabaya
25 Januari 2010_____________________________________________________________________
1
PENANGKAPAN GERAK 3D PADA MANUSIA
MENGGUNAKAN PENANDA AKTIF
Eka Prasetyono1), Mochamad Hariadi2)
Teknik Elektro, Fakultas Teknik Industri, Institut Teknologi Sepuluh Nopember 2
Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember, Surabaya Telp : (031) 5922936, Fax : (031) 5922936
E-mail : [email protected], [email protected] Abstrak
Penangkapan gerak manusia merupakan bagian dari pemanfaatan teknologi visi komputer yang banyak berkembang dibidang animasi dan game. Melalui sistem penangkapan gerak, hasil animasi terlihat lebih alami menyerupai gerakan objek sesungguhnya dan pembuatan animasi dapat dilakukan dalam waktu singkat serta tidak memerlukan banyak pelaku animasi. Perangkat penangkapan gerak yang ada di pasaran masih sangat mahal harganya. Pada penelitian ini dibuat suatu sistem penangkapan gerak manusia berbiaya rendah namun dengan kualitas yang baik. Sistem penangkapan gerak yang dikembangkan menggunakan delapan kamera web yang ditempatkan secara multi sudut pandang, rekonstruksi 3D dengan menggunakan metode triangulasi. Kamera menangkap gerak berdasarkan penanda yang dipasang pada aktor. Sistem yang dikembangkan menghasilkan estimasi pose dengan error sebesar 4.90% , dan selisih simpangan antara 3.4mm sampai 48.8mm. Kata kunci : penangkapan gerak manusia, penanda aktif, multi kamera
1. PENDAHULUAN
Dalam dunia perfilman, tak hanya tokoh mahluk hidup asli yang menjadi tokoh dalam cerita tersebut, tetapi juga ada tokoh tiruan berupa animasi tiga dimensi (3D), mulai dari manusia tiruan, binatang, pepohonan dan segala benda yang menjadi objek pada perfilman tersebut [12]. Hal serupa juga dilakukan dalam dunia permainan. Dahulu permainan diwujudkan dengan gambar dua dimensi (2D), namun saat ini sudah dikembangkan animasi 3D, sehingga dapat dibentuk objek yang sangat mirip dengan yang sebenarnya, demikian pula dengan gerakan manusia atau gerakan objek lainnya Pada bidang game dan animasi untuk membuat pergerakan karakter yang realistis dapat menggunkan teknologi penangkapan gerak. Namun ketersediaan alat dan implementasi teknologi penangkapan gerak khususnya di dunia industri kreatif game dan animasi masih sangat minim dikarenakan mahalnya alat dan perangkat lunak yang dipakai [3].
Untuk menyikapi masalah mahlanya harga pada implementasi penangkapan gerak manusia di bidang industri kreatif game dan animasi maka, penelitian ini mengusulkan penangkapan gerak manusia yang handal dan murah dari segi harga, yaitu melalui penangkapan gerak manusia berdasar penanda aktif dengan multi kamera. Penjejakan berbasis penanda ini banyak dipakai oleh sektor industri dikarenakan ketepatannya dalam penentuan sendi, sehingga dapat dikumpulkan dengan mudah sebagai informasi titik sendi pergerakan di ruang 3D [16]. Untuk memperingan proses komputasi
maka, penanda dipilih penanda aktif yang memancarkan cahaya dan ruang penangkapanan gerak manusia yang minim cahaya. Pemilihahan jenis penanda dan jenis ruangan tersebut bertujuan mempermudah dan memperingan proses pendeteksian penada cukup dengan proses thresholding tanpa back gruond subtraction[3]. Hasil yang diharapkan dari penelitian ini adalah diperolehnya penangkapan gerak manusia yang handal dalam memperoleh titik-titik rekonstruksi dan murah dari segi harga.
2. KAJIAN PUSTAKA DAN DASAR TEORI 2.1 Penangkapan Gerak Manusia
Penangkapanan gerak manusia adalah teknik yang digunakan untuk merekam data digital yang didapat dari pergerakan manusia secara langsung. Penangkapanan gerak manusia digunakan untuk menangkap gerakan dari seorang artis, kemudian hasilnya digunakan untuk menggerakkan model agar pergerakan model tersebut terlihat alami dan dapat dinikmati oleh orang yang melihatnya.
Ada 3 buah representasi model yang sering digunakan dalam sistem penangkapanan gerak manusia yaitu figur tongkat, kontur 2D, dan model volumetrik 3D [1]. Representasi manusia dengan model persendian atau model figur tongkat seperti pada gambar 1 adalah teknik permodelan yang sering dipakai karena mewakili fitur anatomi manusia [10]. Fitur ini dipakai dengan beragam asumsi yang diterapkan demi kemudahan dan kehandalan sistem yang dibangun. Luo dan
teman-teman meneliti menggunakan model antara silu dan figur tongkat [8].
Gambar 1. Model figur tongkat
Representasi manusia dengan model persendian atau model figur tongkat diperoleh dari rekonstruksi titik-titik penanda dari citra tiga dimensi. Citra 3D diperoleh dari proses tranformasi koordinat citra 2D. Untuk dapat melakukan transformasi dari citra 2D ke citra
beberapa parameter yang diperoleh dari kalibrasi kamera. Dalam proses kalibrasi kamera memerlukan suatu model kamera sehingga akan didapatkan parameter internal dan eksternal kamera yang di gunakan untuk parameter pada proses transformasi citra 2D ke citra 3D.
2.2 Model Kamera
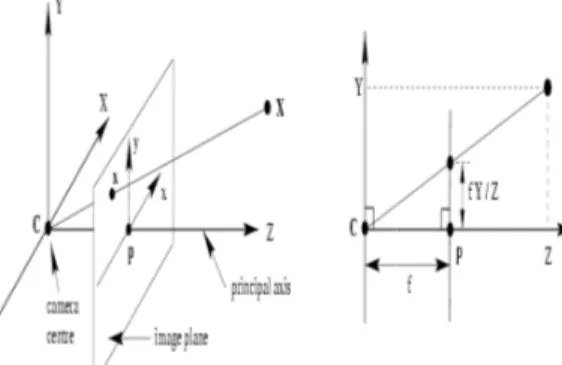
Model kamera yang dipilih dalam penelitian ini adalah model kamera lubang jarum, model ini dipilih karena sudah umum digun
penelitian-penelitian sebelumnya dan berhasil dengan baik [13]. Apabila diasumsikan sebuah kamera dengan pusat titik kamera berhimpit dengan pusat sumbu koordinat dunia, maka dapat di gambarkan seperti nampak pada gambar 2.
Gambar 2. Model kamera lubang jarum Apabila suatu kamera dengan pusat titik kamera tidak berhimpit dengan pusat sumbu koordinat dunia seperti digambarkan pada gambar 3. Untuk memperoleh informasi titik
gambar dalam koordinat dunia maka diperlukan suatu matrik transformasi dari koordiant 2D gambar ke koordinat 3D dunia.
2
teman meneliti menggunakan model antara siluetModel figur tongkat.
Representasi manusia dengan model persendian atau model figur tongkat diperoleh dari titik penanda dari citra tiga ari proses tranformasi . Untuk dapat melakukan ke citra 3D diperlukan beberapa parameter yang diperoleh dari kalibrasi proses kalibrasi kamera rlukan suatu model kamera sehingga akan didapatkan parameter internal dan eksternal dari yang di gunakan untuk parameter pada proses transformasi citra 2D ke citra 3D.
Model kamera yang dipilih dalam penelitian a lubang jarum, model ini dipilih karena sudah umum digunakan pada penelitian sebelumnya dan berhasil . Apabila diasumsikan sebuah kamera dengan pusat titik kamera berhimpit dengan pusat sumbu koordinat dunia, maka dapat
arkan seperti nampak pada gambar 2.
Model kamera lubang jarum Apabila suatu kamera dengan pusat titik kamera tidak berhimpit dengan pusat sumbu seperti digambarkan pada gambar . Untuk memperoleh informasi titik-titik pada gambar dalam koordinat dunia maka diperlukan tu matrik transformasi dari koordiant 2D
, (xSy , (XSY ) , , (xiyi f C y x Titik Gambar Bidang gambar
Gambar 3. Model kamera lubang jarum dengan pusat titik kamera tidak berhimpit de
sumbu koordinat
Untuk dapat melakukan suatu rekonstruksi 3D diperlukan parameter-parameter intrinsik dan ekstrinsik dari kamera, nilai tersebut dapat diperoleh dari persamaan 1 dan persamaan 2
Persamaan 1 merupakan persamaan umum untuk mendapatkan parameter intrinsik kamera,
merupakan nilai focal Xs,Ys pixel.
Persamaan 2 merupakan persamaan umum untuk mendapatkan parameter ekstrinsik kamera sampai R33 merupakan nilai rotasi dari kamera sedangakan Tx,Ty dan Tz merupakan nilai
dari kamera, Xs,Ys, Zs dan xs,ys,zs dunia
Ada beberapa methode yang digunakan untuk melakukan kalibrasi kamera salah satu diantaranya metode Tsai Grid. Dari hasil kalibrasi kamera parameter intrinsik dan ekstrinsik akan diperoleh sebuah matrik yang dapat digunakan untuk melakukan tranformasi dari koordi
koordinat dunia.
2.3 Rekonstruksi 3D
Perbedaan sudut pandang dalam
gambar bukanlah sesuatu yang tidak memiliki hubungan. Ada beberpapa hubungan diantara dua gambar, tiga gambar atau lebih. Hubungan antar gambar ini mengandung banyak makna dan dapat digunakan umtuk mendapatkan suatu informasi dari suatu gambar [13]. Rek
citra yang bersesuaian dapat dilakukan dengan metode triangulasi[6]. ) ,S Sz y ) , S SZ Y Z z O Y X M
Model kamera lubang jarum dengan pusat titik kamera tidak berhimpit dengan pusat
sumbu koordinat dunia
Untuk dapat melakukan suatu rekonstruksi 3D parameter intrinsik dan , nilai tersebut dapat
dan persamaan 2.
(1) Persamaan 1 merupakan persamaan umum untuk mendapatkan parameter intrinsik kamera, αxdan αy Xs,Ys dan Zs, u’ dan v’ dalm
(2) Persamaan 2 merupakan persamaan umum untuk mendapatkan parameter ekstrinsik kamera, R11 merupakan nilai rotasi dari kamera merupakan nilai translasi xs,ys,zs dalam koordinat Ada beberapa methode yang digunakan untuk melakukan kalibrasi kamera salah satu diantaranya Grid. Dari hasil kalibrasi kamera parameter intrinsik dan ekstrinsik akan diperoleh sebuah matrik yang dapat digunakan untuk lakukan tranformasi dari koordinat kamera ke
Perbedaan sudut pandang dalam mengambil gambar bukanlah sesuatu yang tidak memiliki hubungan. Ada beberpapa hubungan diantara dua gambar, tiga gambar atau lebih. Hubungan antar gambar ini mengandung banyak makna dan dapat digunakan umtuk mendapatkan suatu informasi Rekonstruksi 3D dari dua citra yang bersesuaian dapat dilakukan dengan
Seminar Tesis Bidang Keahlian Jaringan Cerdas Multimedia (Teknologi Permainan) Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember, Surabaya
25 Januari 2010_____________________________________________________________________
3
Gambar 4. Proses TriangulasiTitik-titik yang diperoleh pada setiap citra dari masing masing kamera akan ditarnsformasikan dalam koordiant 3D dunia melaui parameter intrinsik dan ekstrinsik kamera, kemudian dari masing-masing pusat kamera dalam koordinat 3D dunia ditarik garis dari pusat kamera melintasi semua titik-titik penanda pada citra yang diperoleh. Hasil perpotongan garis yang melintasi titik-titik penanda pada citra merupakan titik rekonstruksi 3D dalam koordinat dunia seperti pada gambar 4.
Gambar 5. Proses Triangulasi dari dua citra Proses triangulasi dari dua citra pada gambar 5, titik pusat kamera PC1 diperoleh dengan mengalikan matrik parameter eksternal kamera 1 M1 dengan titik (0,0,0) seperti pada persamaan 3.
= 1 0 0 0 1 1 M PC (3) Dengan cara yang sama titik pusat kamera 2 dapat dicari, titik A1 yang merupakan titik citra pada bidang gambar 3D dunia dapat diperoleh dengan mengalikan M1 dengan titik A1 pada citra 2D (x1,y1,-f1) seperti pada persamaan 4, dimana f1 merupakan focal length dari kamera 1.
− = 1 1 1 1 1 1 f y x M A (4) Vector arah dapat dihitung dari dua titik yaitu dari pusat kamera (PC1) ke titik pada bidang gambar A1,dimana k merupakan skalar yang menyatakan panjangnya vector tersebut.
)) 1 1 ( ( 1 1 PC k A PC V = + − (5)
Karena persamaan garis dari vektor V1
dan V 2 tidak berpotongan pada suatu titik, maka diperlukan suatu pendekatan , dimana perpotongan dicari dari titik tengah garis yang memotong secara tegak lurus kedua persamaan garis tersebut yaitu beruapa Vn yang merupakan cros produk dari V1 dan V 2 . Titik x merupakan titik pendekan sebagai hasil rekonstruksi
3. METODE PENELITIAN
Metode dalam penelitian secara garis besar digambarkan pada gambar 5, pertama yang harus dilakukan adalah kalibrasi kamera, kalibrasi kamera ini bertujuan mendapatkan parameter focal length, rotasi dan translasi dari kamera. Kedua adalah data citra berurutan multi kamera yaitu citra yang dihasilkan dari delapan kamera web pada saat yang bersamaan. Setah citra multi kamera diperoleh selanjutnya diproses oleh proses ekstraksi titik penanda untuk mendapatkan data titik-titik penanda pada citra 2D. Proses selanjutnya adalah rekonstruksi 3D dari titik-titik penanda, setelah titik 3D diperoleh direpresentasikan dalam bentuk figur.
Gambar 5. Blok Diagram Metode Penelitian
4. HASIL DAN PEMBAHASAN 4.1 Ruang Penangkapan Gerak
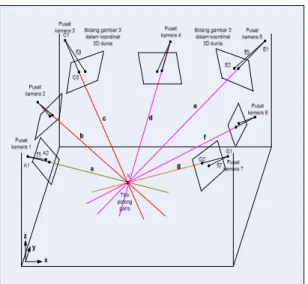
Ruang penangkapan gerak manusia dalam penelitian ini menggunakan sebuah ruangan tertutup untuk menjaga intensitas cahaya yang masuk tidak berubah. Ruang penangkapan gerak ini menggunakan 8 buah kamera webcam dengan posisi peletakan kamera seperi pada gambar 6 berikut ini.
4
Gambar 6. Letak Kamera Pada RuangPenangkapan Gerak
Gambar 7. Ruang Penangkapan Gerak Pemilihan warna latar belakang dari ruangan adalah warna biru dengan menggunakan kain warna biru seperti pada gambar 7. Kain warna biru ini digunakan untuk menutupi seluruh ruangan baik dari sisi samping, sisi atas dan sisi bawah. Ukuran ruang penangkapan gerak manusia dan spesifikasi kamera yang digunakan dalam penelitian ini dapat dilihat pada tabel 1.
Tabel 1. Kamera dan desain ruangan.
No. Nama Keterangan
1 Ukuran ruang 3m x 2,8m x 2,5m
2 Kamera Webcam Logitech QuickCam Pro
3 Resolusi (piksel) HD ( 960 x 720 )
4 Frame Rate 15 fps
4.2 Kostum dan Penanda
Kostum berupa baju yang ukuranya agak ketat, warna biru dengan beberpa titik penanda aktif. Pemilihan penada aktif ini dimaksudkan untuk memperingan proses komputasi dalam memperoleh titik-titik penanda dari semua kamera. Jumlah penada yang diperlukan untuk penelitian ini mengacu pada [10,15]. Gambar 8 merupakan kostum beserta penada yang telah di pakai.
Gambar 8. (a) Kostum dan penanda, (b) Model Figur Tongkat
4.3 Kalibrasi Kamera
Hasil kalibrasi parameter internal kamera dalam penelitian seperti pada tabel 2, focal length tiap kamera berbeda-beda, nilai focal length paling kecil 819.1462 dan nilai paling besar 857.1697.
Table 2. Focal length tiap kamera hasil kalibrasi
Kamera Focal Length
1 838.2909 2 838.2909 3 836.9151 4 836.9155 5 819.1462 6 852.4931 7 857.1697 8 822.2343
Hasil kalibrasi parameter ekternal kamera mulai kemara satu sampai kamera delapan seperti pada tabel 3. Masing-masing parameter ekternal dalam bentuk matrik 4x4 , Perhatikan persamaan 3.3, matrik 4x4 merupakan parameter eksternal kamera, dari persamaan 3.3 tersebut kamera 1 memiliki nilai translasi terletak pada kolom empat baris satu sampai baris tiga yaitu nilai tranlasi x -1027.8999, nilai tranlasi y -967.64079, nilai tranlasi z 1355.39985. Nilai rotasi terletak pada kolom 1 sampai 3 pada baris 1 sampai baris 3.
Seminar Tesis Bidang Keahlian Jaringan Cerdas Multimedia (Teknologi Permainan) Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember, Surabaya
25 Januari 2010_____________________________________________________________________
5
4.4 Porses Akuisisi Data Multi Kamera.Proses akuisisi atau pengambilan data dilakukan di ruang mocap teknik Elektro ITS, data tersebut dilambil dari delapan kamera yang terhubung ke delapan buah komputer. Proses akuisisi data ini ada dua macam, proses pertama pengambilan gambar papan kalibrasi yang selanjutnya digunakan untuk menentukan nilai parameter internal dan parameter eksternal kamera. Proses kedua merekam gerakan yang dilakukan oleh aktor.
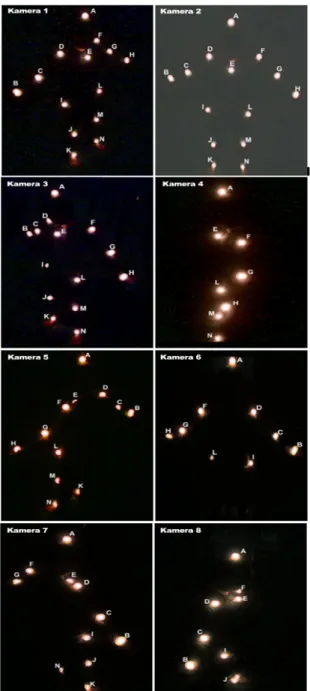
Gambar 9 Citra Multi Kamera
Pada gambar 9 merupakan citra hasil tangkapan 8 kamera pada saat yang bersamaan, kemudian pada citra tersebut masing-masing penanda diberi label, untuk penanda yang sama pada setiap kamera diberikan label yang sama yaitu berupa huruf A-N. Pada posisi kamera tertentu penanda tidak tampak sehingga tidak dapat diberikan label. Pada kamera 1, kamera 2 dan kamera 3 penanda terlihat semua, kemudian pada
kamera 4 sampai kamera 8 ada beberapa penanda yang tidak terlihat
4.5 Ektraksi Titik-titik Penanda
Proses ekstraksi titik-titik penanda bertujuan mendapatkan titik koordinat dari pusat penanda dalam citra 2D kamera agar dapat diolah dalam proses rekonstruksi kedalam koordinat 3D dunia. Proses ekstraksi titik penanda dimulai dari citra asli seperti gambar 10, kemudian dari citra asli tersebut dilakukan proses threshold, proses selanjunya adalah proses pencarian lokasi penanda, proses pencarian lokasi penanda ini dilakukan dengan fungsi contour sehingga area penanda dengan mudah dapat diketahui, setelah area penanda diketahui langkah selanjutnya adalah mencari titik tengah penanda dengan pendekatan titik tengah bujur sangkar.
Gambar 10. Ekstraksi Titik-titik Penanda. Hasil ekstraksi titik-titik penanda dari citra multi kamera pada gambar 9, masing masing penanda mulai penanda A-N memiliki titik koordinat seperti pada tabel aa berikut ini.
Tabel 4. Hasil ekstraksi titik-titik penanda.
Kamera 1 Kamera 2 Kamera 3 Kamera 4 Kamera 5 Kamera 6 Kamera 7 Kamera 8 A -27,298 4,238 -33,258 39,275 94,306 -38,332 -42,211 -61,205 B -232,-2 -210,3 -95,80 - 252,72 219,-51 56,-194 -192,-251 C -173,60 -155,36 -78,100 - 212,110 147,23 30,-91 -150,-137 D -109,157 -78,106 -47,150 - 163,168 55,127 -18,34 -122,11 E -19,146 9,57 -23,102 31,88 - - -38,59 -54,41 F 18,207 124,104 84,116 97,58 28,124 -194,139 -138,98 -G 59,158 192,24 135,20 91,-86 -43,22 -271,59 -165,49 -H 109,116 257,-56 170,-78 - 7,-50 -326,26 - -I -93,-26 -81,-94 -53,-19 - - - 0,-148 -J -60,-137 -60,-228 -43,-144 - - - 5,-242 -K -61,-214 -57,-307 -33,-223 - - - 3,-329 -L 23,24 80,-112 41,-76 37,-140 7,-50 -144,-45 - -M 13,-83 61,-226 35,-184 - - - - -N 13,-162 58,-313 40,-275 29,-344 -5,-249 - -64,-265 -64,-289
Koordinat Penanda (x,y) Pada Citra Penanda
Dari tabel 4 terlihat jelas bahwa pada kamera 1,2 dan 3 semua penanda terlihat, kemudian pada kamera 4 sampai kamera 8 ada beberapa tanda – yang artinya penanda tidak terlihat pada kamera tersebut.
4.6 Hasil rekonstruksi 3D
Rekonstruksi 3D dari citra multi kamera pada gambar 9 hasilnya seperti pada gambar 11. sedangkan beberapa gerakan dalam penelitian ini digambarkan pada gambar 14.
6
Gambar 11. Rekontruksi 3D dan figur tongkatdengan posisi tangan membuka
Pada gambar 11 aktor berdiri pada ruang penakapan gerak dengan posisi tangan membuka, hasil titik rekonstruksi 3D pada posisi aktor tersebut dapat dilihat pada tabel 5 berikut ini.
Tabel 5. Titik hasil rekonstrukis 3D gambar 7.
Penanda Titik Persedian
A Ke pa l a 316.854 328.3366 889.6452 B Pe rgel a nga n ta nga n ka na n -157.203 548.2131 243.1259 C Si ku ta nga n ka na n -12.0781 486.9945 373.324 D Punda k ka na n 163.938 439.1846 576.1042 E Leher 345.063 324.2557 528.6771 F Punda k ki ri 583.999 408.2584 598.3838 G Si ku ta nga n ki ri 752.739 399.8305 420.8304 H Pe rgel a nga n ta nga n ki ri 905.826 320.8629 266.9723 I Pi ngga ng ka na n 158.828 403.7782 77.9328 J Lutut ka na n 214.137 360.0111 -321.036 K Tumi t ka na n 224.998 385.4803 -662.574 L Pi ngga ng ki ri 533.265 338.7525 89.602 M Lutut ki ri 522.735 349.0944 -293.27 N Tumi t ki ri 545.402 358.167 -646.544
Titik dalam koordinat 3D (x,y,z)
Dari hasil rekonstruksi 3D titik-titik penanda pada tabel 5 dapat diukur jarak antar penanda, kemudian jarak antar penanda hasil rekonstruksi dapat dibandingkan dengan jarak penanda sebenarnya pada kostum. Hasil perbandingan jarak rekonstruksi dengan jarak penanda pada kostum dapat dilihat pada tabel 6 berikut ini.
Tabel 6. Jarak penanda hasil rekonstrukis 3D.
Penanda Jarak hasil rekonstruksi (mm) Jarak sebenarnya (mm) Error (mm) Error (%) B-C 204.354 220 15.646 7.112012 C-D 272.740 270 2.740 1.014945 D-E 219.691 240 20.309 8.461943 E-F 262.690 240 22.690 9.454126 F-G 245.090 270 24.910 9.225864 G-H 230.963 220 10.963 4.983253 I-J 405.155 400 5.155 1.288779 J-K 342.658 350 7.342 2.097577 L-M 383.157 400 16.843 4.210857 M-N 354.117 350 4.117 1.176149
Prosentase error yang diperoleh dari tabel 6 adalah prosentase kesalahan jarak antar penanda hasil rekontruksi 3D dibandingkan dengan jarak penanda sebenarnya pada kostum. Porsentase error dari tabel 5 dapat digambarkan dalam bentuk grafik seperti ditunjukkan pada gambar 12. Error terbesar pada jarak E-F yaitu sebesar 9.45%, sedangkan error terkecil pada jarak C-D yaitu sebesar 1.01% sedangkan error rata-rata yang dihasilkan dari tabel 5 sebesar 4.90%.
Gambar 12. Prosentase Error Jarak Hasil Rekontruksi
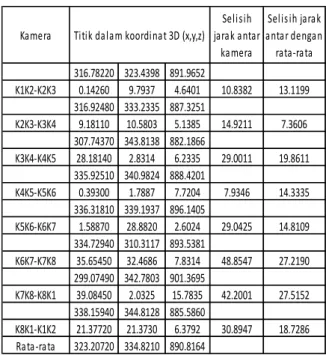
Secara lebih detail error hasil rekonstruksi dalam koordinat 3D dunia disebabkan karena hasil rekonstruksi antara kamera satu dengan kamera dua (K1K2) terhadap kamera dua dengan kamera tiga (K2K3) memiliki selisih, begitu pula antara kamera dua dengan kamera tiga (K2K3) terhadap kamera tiga dengan kamera empat terdapat selisih, begitu seterusnya sampai pada proses kamera delapan selalu ada selisih. Hasil selisih rekonstruksi antar kamera untuk titik penanda pada bagian kepala dapat dilihat pada tabel 7 berikut ini. Tabel 7. Selisih titik rekonstruksi penanda kepala.
Kamera Selisih jarak antar kamera Selis ih jarak antar dengan rata-rata 316.78220 323.4398 891.9652 K1K2-K2K3 0.14260 9.7937 4.6401 10.8382 13.1199 316.92480 333.2335 887.3251 K2K3-K3K4 9.18110 10.5803 5.1385 14.9211 7.3606 307.74370 343.8138 882.1866 K3K4-K4K5 28.18140 2.8314 6.2335 29.0011 19.8611 335.92510 340.9824 888.4201 K4K5-K5K6 0.39300 1.7887 7.7204 7.9346 14.3335 336.31810 339.1937 896.1405 K5K6-K6K7 1.58870 28.8820 2.6024 29.0425 14.8109 334.72940 310.3117 893.5381 K6K7-K7K8 35.65450 32.4686 7.8314 48.8547 27.2190 299.07490 342.7803 901.3695 K7K8-K8K1 39.08450 2.0325 15.7835 42.2001 27.5152 338.15940 344.8128 885.5860 K8K1-K1K2 21.37720 21.3730 6.3792 30.8947 18.7286 Rata-rata 323.20720 334.8210 890.8164
Titik dalam koordinat 3D (x,y,z)
Selisih titik rekonstruksi penanda bagian kepala pada tabel 7 terjadi pada koordinat x,y dan z. Nilai selisih untuk koordinat x paling kecil
Seminar Tesis Bidang Keahlian Jaringan Cerdas Multimedia (Teknologi Permainan) Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember, Surabaya
25 Januari 2010_____________________________________________________________________
7
0.14mm dan paling besar 39.08mm dan untuk y selisih paling kecil 1.78mm dan paling besar 28.88mm, sedangkan untuk sumbu z cenderung setabil memiliki selisih paling kecil 2.60mm dan selisih paling besar 15.78mm. Selisih hasil rekonstruksi penanda kepala dapat digambarkaan dengan grafik pada gambar 13.Gambar 13. Selisih titik rekonstruksi penanda kepala antar kamera.
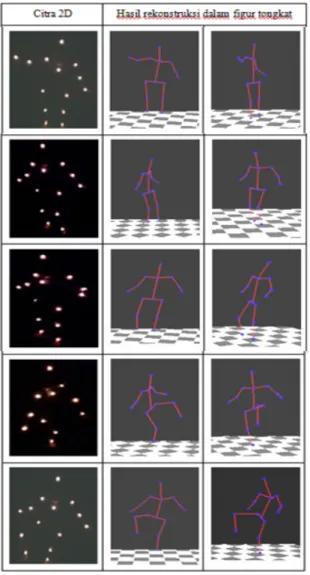
Hasil percobaan untuk beberapa gerakan sederhana dalam penelitian ini seperti pada tabel 14 berikut ini, gerakan pada penelitian ini hanya berupa gerakan-gerkan sederhana dan dengan kecepatan gerak yang lambat.
Tabel 14. Beberapa gerakan dalam percobaan.
5. KESIMPULAN
Dari hasil perancangan sistem kemudian dilanjutkan pengambilan data, pengujian dan analisa, maka dapat disimpulkan sebagai berikut:
1. Ekstraksi penanda bagian tubuh dari citra sekuensial 2D memiliki nilai keberhasilan 100% , karena background berwarna hitam dan penanda berwarna putih.
2. Titik-titik penanda yang hilang pada citra salah satu kamera dapat ditemukan pada kamera yang lain, kecuali pada posisi tertentu dimana penanda tertutup oleh bagian tubuh secara keseluruhan.
3. Perbedaan titik hasil rekonstruksi antar kamera bervariasi, selisih terkecil 3.4mm dan selisih terbesar 48.8mm.
4. Ditinjau dari hasil rekonstruksi metode dalam penelitian ini dapat digunakan untuk proses penangkapan gerak selanjutnya.
Untuk pengembangan pada penelitian selanjutnya disarankan hal - hal sebagai berikut :
1. Hendaknya menggunakan kamera dengan frame rate yang tinggi untuk dapat menangkap gerakan-gerakan cepat seperti berlari, memukul dan melompat.
2. Ukuran ruang penangkapan gerak hendaknya diperbesar agar aktor dapat bergerak dengan leluasa dan gerakannya mampu ditangkap oleh semua kamera.
6. DAFTAR PUSTAKA
[1] Aggarwal, J.K., dan Q. Cai. (1999), "Human Motion Analysis: A review", Computer Vision and Image Understanding, Vol. 73, no.3, pp. 428-440.
[2] Boulic, Ronan., Fua, Pascal., Herda, Lorna., Silaghi, Marius.,Monzani, Jean-Sébastien., Nedel, Luciana and Thalmann,Daniel (1998), “An Anatomic Human Body for Motion Capture”, Computer Graphics Laboratory, EPFL CH-1015 Lausanne, Switzerland [3] Budiman, R., Bennamoun, M. and Huynh, D.Q.
(2005). “Low Cost Motion Capture”, Image and Vision Computing New Zealand, Dunedin, The University of Western Australia. [4] Chen, Xing,. Davis, James (2000), “Camera Placement Considering Occlusion for Robust Motion Capture Computer”, Graphics Laboratory CS-TR-2000-07, Stanford University, California, USA
[5] Garza, Victor j, (2004). “Creating Hyper-realistic Movements by Combining motion Capture and Cartoon Motion”, A study of animated motion, Middlesex University, SAE Institute London. 0 5 10 15 20 25 30 35 40 45 Sumbu X Sumbu Y Sumbu Z Jarak (mm) Selisih Jarah
8
[6] Filho, Gutemberg B. Guerra. (2005), “OpticalMotion Capture:Theory and Implementation”, in Tutorial XVIII Brazilian Symposium on Computer Graphics and Image Processing, Volume XII, Computer Vision Laboratory Center for Automation Research University of Maryland, hal 1-29.
[7] Iwashita, Yumi,. Kurazume, Ryo,. Hasegawa, Tsutomu,. Hara, Kenji.(2006). “Robust Motion Capture System against Target Occlusion using Fast Level Set Method”. Proceedings 2006 IEEE International Conference on publication 15-19 May 2006 Page:168 – 174. [8] Luo, Y., Perales, F., dan Villanueva, J. (1992),
“An Automatic Rotoscopy System for Human Motion based on a Biomechanic Graphical Model,” Computers & Graphics 16(4).
[9] Menier, Clement., Boyer, Edmond., Raffin, Bruno. (2006), “3D Skeleton Base Body Pose Recovery”, 3rd International Symposium on 3D Data Processing, Visualization and Transmission (3DPVT IEEE Computer Society 2006), Chapel Hill, North Carolina, USA. [10] Moeslund, T.B. (1999), “The
Analysis-by-Synthesis Approach in Human Motion Capture: A Review”, The 8th Danish conference on pattern recognition and image analysis, Copenhagen University, Denmark. [11] Moeslund, T.B., A. Hilton, dan V. Kruger.
(2006), “A Survey of Advances in Vision-based Human Motion Capture and Analysis”, Computer Vision and Image Understanding, 104, hal. 90-126.
[12] Perales, F.J. (2002), “Human Motion Analysis & Synthesis using Computer Vision and Graphics Techniques:State of Art and Applications”, Workshop on Centre of Computer Graphics and Data Visualisation, University of West Bohemia, Czech Republic. [13] Pollefeys, Marc,(2003). “Visual 3D Modeling
from Images”. Tutorial Note, Department of Computer Science, University of North Carolina, Chapel Hill, USA
[14] Poppe, Ronald. (2007), “Vision-based human motion analysis: An overview”, Computer Vision and Image Understanding, Volume 108, Issues 1-2, Pages 4-18.
[15] Remondino, F., dan Roditakis, A. (2003), “3D Reconstruction of Human Skeleton from Single Images or Monocular Video Sequences”. 25th Pattern Recognition Symposium, Lecture Notes in Computer Science, DAGM 03 (pp. 100-107). Magdeburg, Germany.
[16] Shipley, T. F., dan Brumberg, J. S. (2005). “Markerless Motion-capture for Point-light Displays”. Biological Motion Project,
Department of Psychology,Temple University, Philadelphia.