37
PERANCANGAN SISTEM
3.1. Pengertian Umum
Mapping Parking System merupakan suatu sistem pada bangunan area parkir indoor yang digunakan untuk memetakan letak slot parkir dan memberitahukan
kondisi slot parkir, dengan menggunakan Sensor Modul Controller yang diletakkan pada setiap slot parkir.
3.2. Perancangan Perangkat Keras (Hardware)
Perangkat keras yang akan digunakan dalam sistem ini antara lain meliputi sistem minimum Sensor Modul Controller yang digunakan untuk mengendalikan
Sensor PING Ultrasonic, kemudian Main Modul Controller yang digunakan dalam
melakukan control komunikasi dan jalur data yang terjadi pada sistem, Personal
Computer (PC) yang digunakan untuk mengolah data dan menampilkan denah dari
area parkir kepada petugas parkir pos masuk sehingga dapat memberi informasi kepada customer mengenai slot parkir yang kosong.
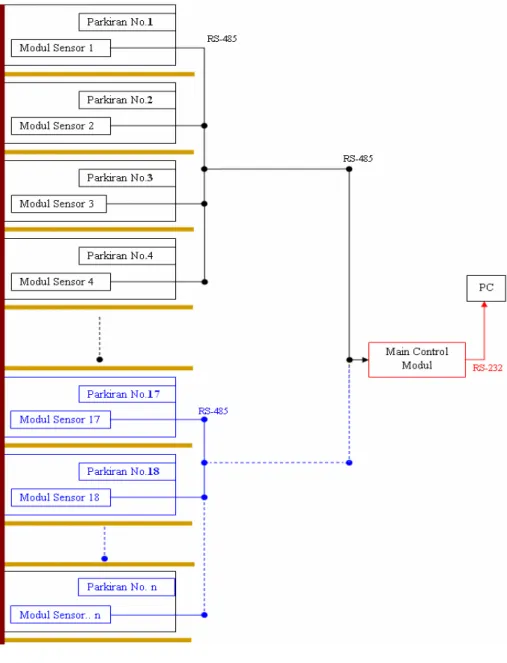
3.2.1. Blok Diagram Sistem
Blok diagram dari Mapping Parking System yang akan dibangun tampak seperti pada Gambar 3.1.
Gambar 3.1. Blok Diagram Implentasi Sistem
Secara garis besar komunikasi antara Sensor Modul Controller dengan
Gambar 3.2 Blok Diagram Jalur Komunikasi Data
Penjelasan mengenai blok diagram jalur komunikasi data antara Sensor
Modul Controller dengan Main Modul Controller adalah sebagai berikut:
¾ A adalah proses permintaan data dan pengiriman address dari PC. ¾ B adalah komunikasi paralel data yang diterima MCS1
(MicroController System) ke MCS2.
¾ C adalah penerimaan dan pemeriksaan data dan address oleh
Sensor Modul Controller.
¾ D adalah pengiriman data jarak hasil pendeteksian slot parkir. ¾ E adalah komunikasi paralel data yang diterima MCS2 ke MCS1. ¾ F adalah pengiriman data pendeteksian slot parkir diterima oleh
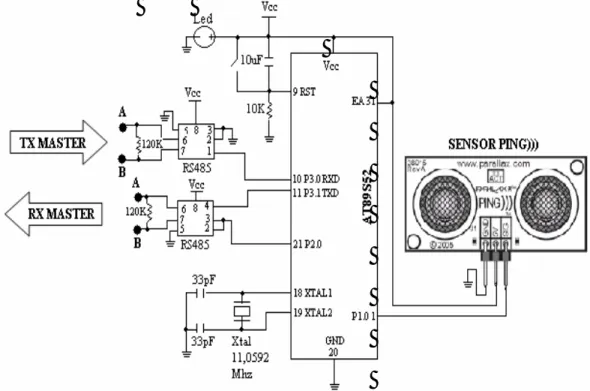
3.2.2. Perancangan Sensor Modul Controller
Gambar 3.3 Rangkaian Sensor Modul Controller
Pada masing-masing slot parkir terdapat Sensor Modul
Controller, dimana setiap Sensor Modul Controller mempunyai address
masing-masing sehingga pengambilan jarak pada setiap slot parkir dilakukan jika ada request (perintah) dari Main Modul Controller. Pada
Sensor Modul Controller, microcontroller AT89S52 mengatur
penggambilan jarak dan pengiriman dan penerimaan data baik dari Main
Modul Controller maupun ke Main Modul Controller dengan
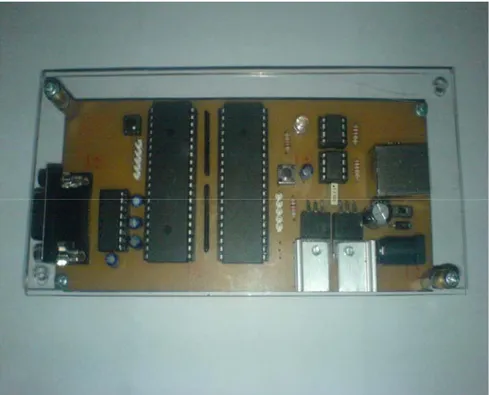
Gambar 3.4 Sensor Modul Controller
Berikut merupakan gambar Sensor Modul Controller yang telah
di-package sehingga telah siap untuk dipasang pada aplikasi sebenarnya.
Pada Main Modul Controller, terdapat 2 microcontroller yang
berfungsi untuk melakukan pengambilan data dan pengiriman data. MCS1 (microcontroller pertama) menghubungkan komunikasi antara PC dengan Main Modul Controller. Selain itu juga, P1 merupakan pemberi instruksi pengambilan jarak pada setiap Sensor Modul Controller sesuai dengan alamat Sensor Modul Controller per slotnya. Pada P2, menghubungkan komunikasi antara P1 (microcontroller pertama) dengan
Sensor Modul Controller pada tiap slot parkir. Pengiriman data antara P1
dan P2 yaitu sebesar 8 bit secara half duplex.
Berikut gambar Main Modul Controller secara keseluruhan:
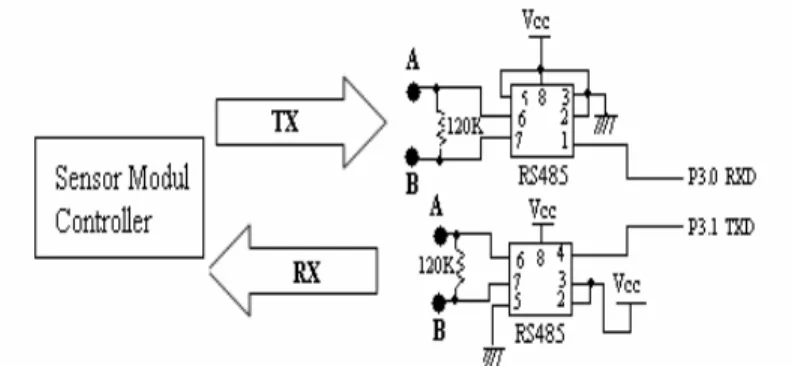
3.2.4. Perancangan Komunikasi Serial
Perancangan komunikasi serial pada Mapping Parking System
yaitu komunikasi serial RS-485 dan RS-232. Komunikasi serial RS-485 digunakan untuk komunikasi antara Main Modul Controller dengan
Sensor Modul Controller, sedangkan komunikasi serial RS-232
digunakan untuk komunikasi antara PC dan Main Modul Controller. Berikut merupakan skematik dari rangkaian komunikasi serial RS-485 dan RS-232:
Gambar 3.8 Rangkaian RS-485
3.2.5. Perangkat Pendukung
Perangkat pendukung pada Mapping Parking System yaitu
adaptor dari handphone nokia dengan spesifikasinya pada tabel 3.1.berikut ini:
Tabel 3.1. Spesifikasi Adaptor
Keterangan Input (AC) Output (DC)
Tegangan (V) 220 5
Arus (mA) 180 890
Daya (W) 39.6 4.450
Adaptor ini digunakan sebagai supply DC untuk Sensor Modul
Controller.
3.3. Perancangan Piranti Lunak (Software)
Pada perancangan perangkat lunak dapat dibedakan menjadi dua bagian yakni perancangan perangkat lunak pada Sensor Modul Controller dan Main
Modul Controller dengan menggunakan program bahasa rakitan dan perancangan
perangkat lunak pada PC dengan menggunakan Microsoft Visual Basic 6.0.
3.3.1. Perancangan Piranti Lunak pada Main Modul Controller
Pada Main Modul Controller digunakan 2 buah microcontroller
oleh karena itu flowchart perangkat lunak dari Main Modul Controller terpisah menjadi 2 tetapi tetap saling berkaitan. Flowchart disebelah kiri pada gambar 3.8 adalah flowchart ke-1 untuk perangkat lunak pada MCS1 (Micro Controller System) dengan standar komunikasi serial RS-232 menghubungkan PC dengan Main Modul Controller dan untuk
flowchart disebelah kanan adalah flowchart ke-2 untuk perangkat lunak
pada MCS2 dengan standar komunikasi RS-485 yang menghubungkan antara Main Modul Controller dengan Sensor Modul Controller. Pada
flowchart ke-1 dan ke-2 pertama-tama yang dilakukan adalah deklarasi
variabel yang digunakan, menentukan Timer yang digunakan yakni Timer 1 dan mengatur mode komunikasi serial yakni MODE 1 UART 8 bit dengan baudrate 9600 Kbps.
Selanjutnya pada MSC1 akan dilakukan pemeriksaan apakah ada data yang di kirim dari PC (A) jika tidak ada data yang dikirim maka akan selalu melakukan pemeriksaan dan jika ada data yang dikirim maka data tersebut akan diteruskan atau di kirim ke MCS2 (B) dan setelah data di kirim maka akan dilakukan permeriksaan kembali apakah ada data yang di kirim dari dari MCS2 (E) jika tidak ada maka akan dilakukan pengecekkan kembali dan apabila ada data yang masuk maka akan di kirim ke PC (F). Sama halnya pada MCS2 akan melakukan pemeriksaan juga apakah ada data dari MCS1 (B), jika ada maka kirim data ke Sensor
Modul Controller (C) kemudian MCS2 akan menganggu data yang di
kirim dari Sensor Modul Controller (D), jika ada maka data akan dikirim ke MCS1 (E).
Pada perancangan perangkat lunak pada Main Modul Controller mempunyai flowchart sebagai berikut:
Start
C ek ada perm intaan dari M ain M odul
C ontroller ?
T idak
Y a
C ek address yang dikirim M ain M odul
C ontroller ?
Perhitungan Sensor M odul C ontroller : T rigger Sensor Ping
K irim sinyal ultrasonic ,T im er0 m ulai m enghitung T unggu pantulan
M atikan Ping, Stop T im er
Sim pan jarak yang terukur di variabel Jarak
K irim data Jarak ke M ain M odul C ontroller Y a T idak D D eklarasi V ariabel C Setting T im er 0 dan T im er 1 Setting K om unikasi Serial
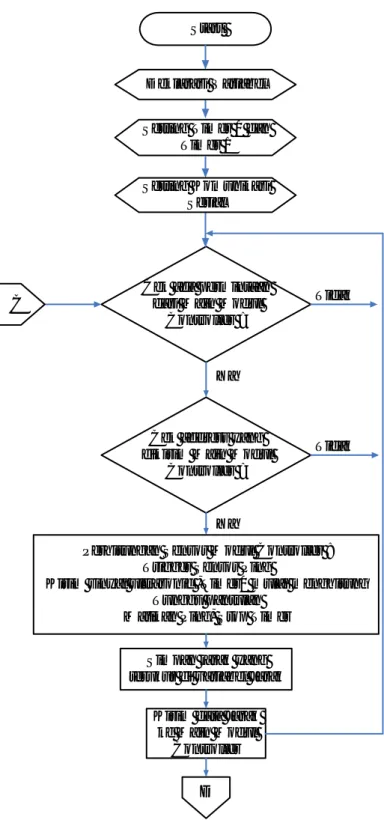
3.3.2. Perancangan Piranti Lunak pada Sensor Modul Controller
Pada perancangan perangkat lunak pada Sensor Modul Controller mempunyai flowchart yang dapat dilihat pada halaman berikutnya:
Pertama-tama setelah Sensor Modul Controller mendapat sumber
daya dan akan membuat microprocessor berkerja melakukan deklarasi variable yang digunakan untuk data jarak dari Sensor PING Ultrasonic,
setting Timer yang digunakan yakni Timer 0, Timer 16 bit dan Timer 1, Timer 8 bit auto reload. Kemudian men-setting mode yang digunakan
untuk komunikasi serial microcontroller AT89S52. Mode komunikasi
serial yang digunakan adalah MODE 1 UART 8 bit dengan baudrate
9600 Kbps. Setelah melakukan deklarasi variable, Timer dan serial mode maka Sensor Modul Controller akan dalam kondisi waiting, menunggu dari program GUI yang ada pada PC untuk melakukan permintaan data jarak. Jika terdapat permintaan maka setelah itu dilakukan pengecekan data address dari GUI apakah cocok dengan address yang ada pada
microcontroller AT89S52, jika tidak cocok maka akan kembali
melakukan pemeriksaan apakah ada permintaan dari GUI dan jika
address yang dikirim cocok dengan address yang ada pada microcontroller maka microcontroller tersebut akan men-trigger Sensor PING Ultrasonic dan sesaat kemudian Sensor PING Ultrasonic akan ON
dan mengirimkan sinyal ultrasonik. Sesaat setelah sinyal ultrasonic di kirim maka Timer 0 akan mulai menghitung lamanya sinyal pantulan kembali lagi ke Sensor PING Ultrasonic. Sesaat setelah sinyal pantulan diterima maka Timer 0 akan di-stop dan mematikan Sensor PING
Ultrasonic. Data hasil perhitungan oleh Timer 0 akan disimpan pada
variable jarak selanjutnya akan dikirim kembali ke Main Modul
3.3.3. Perancangan Tampilan GUI pada PC
Pada tampilan GUI pada PC mempunyai flowhart yang dapat dilihat berikut ini:
Gambar 3.12 Flowchart Tampilan GUI
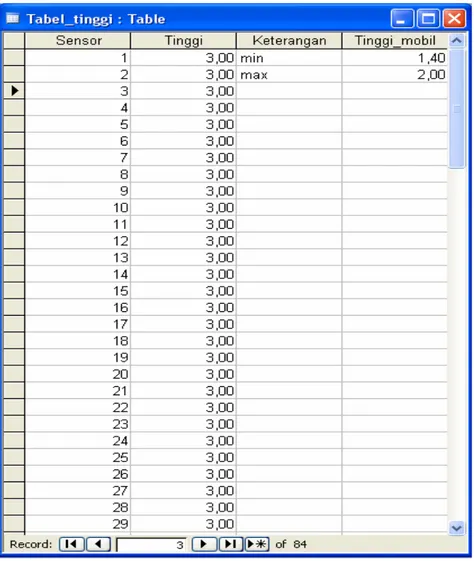
3.3.4. Perancangan Database
Database pada Mapping Parking System dibuat dengan
mengggunakan Microsoft Office Access 2003. Penggunaan database pada
Mapping Parking System dimaksud untuk melakukan adjustment tinggi
dari lantai ke atap area parkir secara software. Selain itu, database juga digunakan untuk menyimpan data ketinggian per slot parkir, nomor urut slot parkir, ketinggian maksimum mobil dan ketinggian minimum mobil. Berikut merupakan database pada Microsoft Office Access 2003::
Gambar 3.13 Database Pada Microsoft Office Access 2003
3.4. Perancangan Peletakan Sensor Modul Controller
Pada penelitian ini dilakukan juga pengumpulan data mengenai jenis mobil dan karakteristiknya yang pada umumnya digunakan oleh mahasiswa dan staff Universitas Bina Nusantara, yakni sebagai berikut: [9, 10, 11,12,13,14,15].
Table 3.2 Data Survei Mobil
No Merek Tipe Tinggi
(mm) Panjang (mm) Lebar (mm) 1 Toyota Yaris 1520 3750 1695 2 Toyota Vios 1460 4300 1700 3 Toyota Rush 1740 4405 1745 4 Toyota Previa 1750 4795 1800
5 Toyota Kijang Innova 1745 4555 1770
6 Toyota Hilux 1680 4795 1760
7 Toyota Fortuner 1850 4695 1840
8 Toyota Crown 1470 4840 1780
9 Toyota Corolla Altis 1480 4530 1705
10 Toyota Avanza 1695 4120 1630
11 Toyota Camry 1470 4825 1820
12 Isuzu Phanter Touring 1873 4692 1771
13 Isuzu Phanter Grand Touring 1873 4692 1771
14 Isuzu Phanter Smart 1750 4476 1680
15 Isuzu Phanter LV FF 1765 4476 1680
16 Isuzu Phanter LS Turbo 1765 4476 1680
17 Isuzu Phanter LM 1765 4476 1680 18 KIA Picanto 1480 3535 1595 19 KIA Carens 1609 4493 1748 20 KIA Sedona 1805 4925 1900 21 KIA Sorento 1730 4567 1863 22 KIA Sportage 1695 4350 1800 23 KIA Bigup 1970 4820 1740 24 Jaguar X-Type 1425 4827 2027 25 Jaguar XK 1300 4715 2037 26 Jaguar XJ 1425 5010 2075 27 Jaguar S-Type 1425 4827 2027 28 Audi TT Coupe 1352 4178 1842 29 Audi R8 1249 4178 1904 30 Audi Q7 1983 5086 1651 31 Audi A8 L 1455 5192 1894 32 Audi A6 Sallon 1459 4916 2021
33 Audi A4 Sallon 1427 4586 1772 34 Audi A4 Avant 1427 4586 1772 35 Audi A3 Sportback 1423 4286 1765 36 Audi A3 1421 4214 1765 37 Honda Accord 1456 4865 1824 38 Honda City 1485 4390 1690 39 Honda Civic 1435 4540 1755 40 Honda CRV 1680 4530 1820 41 Honda Jazz 1485 3830 1693
42 Suzuki Carry Real Van 1915 3875 1570
43 Suzuki Katana 1825 3430 1460
44 Suzuki APV Arena 1855 4225 1655
45 Suzuki Aerio 1550 4230 1630
46 Suzuki Baleno Next-G 1545 4350 1690
47 Suzuki Escudo 1.6 1740 4090 1965
48 Suzuki Escudo 2.0 1740 4195 1780
49 Suzuki Escudo Xl-7 1740 4575 1780
50 Suzuki Grand Vitara 1695 4470 1810
51 Suzuki New Swift 1510 3755 1690
52 Suzuki SX-4 1605 4135 1755
53 Suzuki Karimun Estilo 1605 4135 1755
Rata- Rata 1615 4450 1774
Dari data pada table 3.1 didapatkan kesimpulan sebagai berikut :
¾ Panjang maximum = 5192 mm ¾ Panjang minimum = 3430 mm ¾ Lebar maximum = 2075 mm ¾ Lebar minimum = 1460 mm ¾ Tinggi maximum = 1983 mm ¾ Tinggi minimum = 1249 mm
Berdasarkan hasil survey di area parkir basement Kampus Anggrek Bina Nusantara di dapat ukuran are parkir adalah 4500 mm x 2700 mm. Posisi peletakan Sensor Modul Controller sebagai berikut:
Gambar 3.14