II. TINJAUAN PUSTAKA
2.1 Traktor Roda Empat
Traktor adalah suatu mesin traksi yang utamanya dirancang dan dinyatakan sebagai penyedia tenaga bagi peralatan pertanian dan perlengkapan usaha tani (Sakai et al, 1998). Traktor roda empat merupakan mesin berdaya gerak sendiri berupa motor diesel, beroda empat (ban karet atau ditambah roda sangkar dari baja) yang mempunyai tiga titik gandengan, berfungsi untuk menarik, menggerakkan, mengangkat, mendorong alat dan mesin pertanian dan juga sebagai sumber daya penggerak (SNI 7416:2010).
2.1.1
Klasifikasi traktor pertanian roda empat
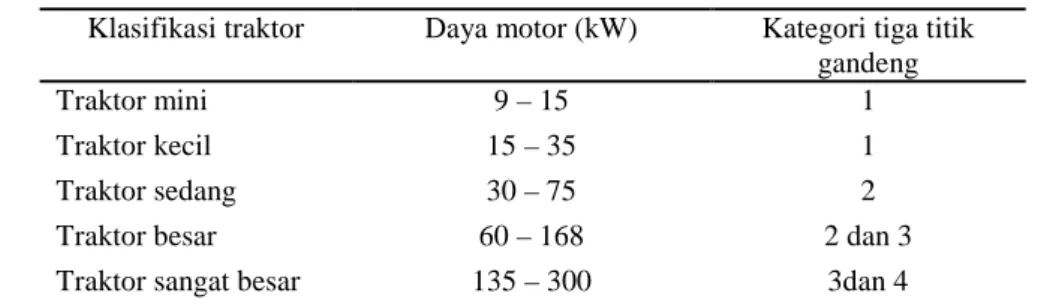
Menurut SNI 7416:2010, berdasarkan besaran daya sumber penggerak motor diesel dan kategori tiga titik gandeng, traktor roda empat diklasifikasikan ke dalam empat kelas, seperti yang disajikan pada tabel di bawah ini:
Tabel 1. Klasifikasi traktor roda empat berdasarkan besaran daya penggerak motor diesel dan Kategori tiga titik gandeng
Klasifikasi traktor Daya motor (kW) Kategori tiga titik gandeng
Traktor mini 9 – 15 1
Traktor kecil 15 – 35 1
Traktor sedang 30 – 75 2
Traktor besar 60 – 168 2 dan 3
Traktor sangat besar 135 – 300 3dan 4
Sumber: SNI 7416 tahun 2010
Sedangkan berdasarkan jumlah poros penggerak roda, traktor roda empat dapat diklasifikasikan ke dalam dua jenis yaitu:
a) Traktor dengan poros penggerak tunggal (two wheel drive, 2WD); yaitu traktor yang digerakkan oleh kedua roda belakang.
b) Traktor dengan poros penggerak ganda (four wheel drive, 4WD); yaitu traktor yang digerakkan oleh keempat roda.
2.1.2 Konstruksi utama traktor roda empat
Traktor roda empat terdiri dari bagian – bagian utama sebagai berikut: 1. Mesin (engine)
2. Alat untuk penyaluran tenaga (power transmission device) 3. Alat untuk bergerak (running device)
4. Alat untuk bekerja (working device) 5. Alat untuk kemudi (steering device)
Adapun spesifikasi traktor secara lengkap yang digunakan dalam penelitian ini disajikan pada Lampiran 1.
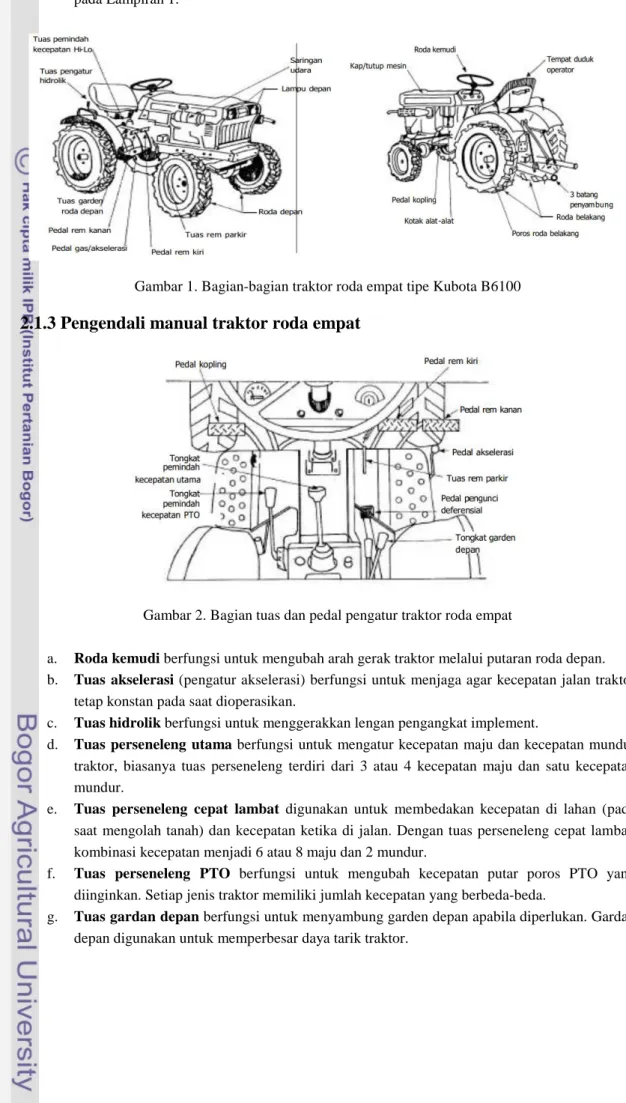
Gambar 1. Bagian-bagian traktor roda empat tipe Kubota B6100
2.1.3 Pengendali manual traktor roda empat
Gambar 2. Bagian tuas dan pedal pengatur traktor roda empat
a. Roda kemudi berfungsi untuk mengubah arah gerak traktor melalui putaran roda depan.
b. Tuas akselerasi (pengatur akselerasi) berfungsi untuk menjaga agar kecepatan jalan traktor
tetap konstan pada saat dioperasikan.
c. Tuas hidrolik berfungsi untuk menggerakkan lengan pengangkat implement.
d. Tuas perseneleng utama berfungsi untuk mengatur kecepatan maju dan kecepatan mundur
traktor, biasanya tuas perseneleng terdiri dari 3 atau 4 kecepatan maju dan satu kecepatan mundur.
e. Tuas perseneleng cepat lambat digunakan untuk membedakan kecepatan di lahan (pada
saat mengolah tanah) dan kecepatan ketika di jalan. Dengan tuas perseneleng cepat lambat, kombinasi kecepatan menjadi 6 atau 8 maju dan 2 mundur.
f. Tuas perseneleng PTO berfungsi untuk mengubah kecepatan putar poros PTO yang
diinginkan. Setiap jenis traktor memiliki jumlah kecepatan yang berbeda-beda.
g. Tuas gardan depan berfungsi untuk menyambung garden depan apabila diperlukan. Gardan
h. Pedal kopling berfungsi untuk menghubungkan dan melepaskan hubungan antara motor
penggerak dengan transmisi.
i. Pedal rem (kanan dan kiri)berfungsi untuk membantu beloknya traktor secara tajam, baik
ke kanan maupun ke kiri.
j. Pedal akselerasi berfungsi untuk mempercepat dan memperlambat putaran motor penggerak.
Apabila pedal akselerasi ditekan maka putaran motor penggerak akan semakin cepat dan sebaliknya.
k. Tuas rem parkir berfungsi untuk menahan rem tetap pada posisi mengerem.
l. Pedal pengunci differensial (gardan) berfungsi untuk menyamakan putaran kedua roda
belakang.
2.2 Sistem Kontrol
Sistem kontrol merupakan sekumpulan alur logika yang dibuat dengan tujuan agar alat mampu bekerja dengan optimal. Aliran prosesnya secara sederhana dimulai dari adanya perintah yang dilanjutkan dengan manipulasi proses dan berakhir pada bagian tampilan keluaran.
Berdasarkan ada atau tidaknya umpan balik (feedback), Ogata (1985) membagi sistem kontrol menjadi dua jenis yaitu sistem kontrol loop tertutup (close loop control system) dan sistem kontrol loop terbuka (open loop control system).
Sistem kontrol loop terbuka lebih sederhana dan mudah dibuat, tetapi memiliki kelemahan dalam hal merespon gangguan dari luar sistem. Apabila terjadi gangguan sistem kontrol loop terbuka tidak memiliki mekanisme pengurangan error secara otomatis. Sehingga nilai keluarannya berbeda dengan yang diperintahkan.
Sistem kontrol loop tertutup adalah sistem kontrol yang sinyal keluarannya diumpankan kembali ke masukan sehingga aksi pengontrolan dipengaruhi oleh nilai keluaran tersebut. Istilah
loop tertutup bermakna menggunakan aksi umpan balik untuk memperkecil kesalahan sistem.
Nilai keluaran yang berasal dari sensor disebut sebagai nilai sebenarnya (preset value). Sebelum masuk ke dalam proses pengendalian nilai tersebut akan dikondisikan terlebih dahulu agar sesuai dengan karakteristik masukan pengendali (controller). Tahapan berikutnya adalah proses perbandingan antara preset value dengan nilai yang diperintahkan (set point) oleh
controller. Perbedaan atau selisih nilai diantara keduanya disebut sebagai kesalahan (error). Dalam
sistem kontrol loop tertutup controller akan memberikan perintah untuk memperkecil error tersebut kepada bagian aksi kendali (actuator) secara otomatis. Berdasarkan proses tersebut sistem kontrol loop tertutup sering disebut sistem kontrol otomatis (automatic control system). Gambar berikut menunjukkan proses yang terjadi pada sistem kontrol loop tertutup (Ogata 1985; Jacob 1989).
2.3 Mikrokontroler
Syamsurizal (2008), Menyebutkan bahwa Mikrokontroler merupakan sebuah sistem mikroprosesor lengkap yang dikemas dalam sebuah chip. Mikrokontroler dapat menggantikan fungsi komputer dalam pengendalian kerja. Keuntungan penggunaan mikrokontroler adalah sistem elektronik akan menjadi lebih mudah dan ringkas dan rancang bangun sistem elektronik akan lebih cepat karena sebagian besar dari sistem adalah perangkat lunak yang mudah dimodifikasi.
Mikrokontroler tersusun atas mikroprosesor dan piranti pendukungnya. Sistem kerjanya diatur berdasarkan program dalam bahasa pemrograman yang digunakan, ada beberapa bahasa pemrograman yang digunakan, pada umumnya semua bahasa pemrograman dapat diaplikasikan ke mikrokontroler, akan tetapi membutuhkan compiler yang mendukung mikrokontroler tersebut. Bahasa pemrograman yang biasa digunakan dalam memprogram mikrokontroler produksi Atmel adalah bahasa Assembler, bahasa C, C++, Basic maupun turbo pascal (Bayu,2010).
Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu keluarga ATtiny, AT90Sxx, ATMega dan AT86RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori,
peripheral, dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, dapat dikatakan hampir
sama.
Mikrokontroler yang digunakan dalam penelitian ini adalah DT-AVR ATmega128L
Bootloader Micro System (BMS). Mikrokontroler jenis ini merupakan sebuah modul single chip
berbasis mikrokontroler ATmega 128L. DT-AVR ATmega128L BMS dilengkapi dengan program
bootloader sehingga tidak membutuhkan device programmer. Dengan menggunakan bootloader pada
DT-AVR ATmega128L BMS, pengguna dapat menggunakan jalur UART sebagai jalur komunikasi dengan computer, sekaligus menggunakan untuk melakukan remote programming jika ada perbaikan program (update). Software yang digunakan untuk memprogram mikrokontroler adalah AVR
Bootloader v1.0.
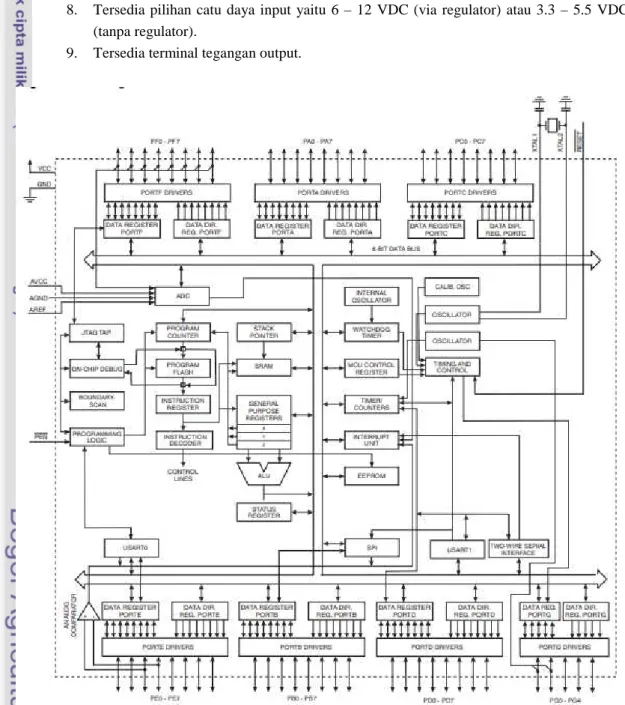
. Gambar 4. Konfigurasi pin ATmega 128L
Spesifikasi mikrokontroler DT-AVR ATmega128L BMS adalah sebagai berikut:
1. Berbasis mikrokontroler ATmega128L dengan flash memory sebesar 124 Kbyte (4 Kbyte telah digunakan untuk bootloader) dan 8 channel ADC 10 bit.
2. Dilengkapi dengan program bootloader yang dapat diprogram menggunakan software AVR Bootloader v1.0.
3. Memiliki sampai 52 jalur Input/output.
4. Tersedia jalur komunikasi serial UART melalui USB atau UART RS-232 melalui konektor RJ45, sekaligus sebagai jalur untuk pemrograman mikrokontroler.
5. Frekuensi osilator 7.3728 Mhz.
6. Tersedia rangkaian reset manual dengan tactile switch.
7. Dilengkapi dengan pilihan regulator 3.3 v atau 5V dengan arus maksimum 800mA. 8. Tersedia pilihan catu daya input yaitu 6 – 12 VDC (via regulator) atau 3.3 – 5.5 VDC
(tanpa regulator).
9. Tersedia terminal tegangan output.
Gambar 6.Tata letak Mikrokontroler ATmega 128 L BMS
2.4 Komunikasi data
Komunikasi data merupakan transmisi pesan digital ke peralatan eksternal dari sebuah sumber pesan (Strangio, 2006). Jarak perpindahan data dapat bervariasi dari seperseribu inchi sampai ribuan kilometer. Saluran komunikasi merupakan panduan agar informasi dapat dipindahkan. Secara fisik saluran komunikasi ini berupa kawat, radio, laser maupun pancaran sumber energi yang tidak tampak. Informasi yang dikirim melalui saluran komunikasi memiliki sumber dari mana informasi berasal dan tujuan ke mana informasi akan diantar apakah ke satu atau banyak tujuan tergantung dari jumlah stasiun penerima yang terhubung dan energy untuk melakukan proses transmisi sinyal (Strangio, 2006). Pada saluran komunikasi digital informasi diwakili oleh satu bit data yang mungkin disatukan dalam unit pesan multi bit (Awad, E.M.1996). Komunikasi data pada sistem kendali traktor ini dilakukan secara nirkabel dengan menggunakan wireless.
2.5 Komunikasi Nirkabel
Jaringan wireless (nirkabel) adalah teknologi jaringan yang memanfaatkan gelombang elektromagnetik melalui udara sebagai media untuk mengirimkan informasi dari pengirim ke penerima. Teknologi ini muncul sebagai jawaban atas keterbatasan jaringan wireline. Mobilitas manusia yang tinggi dan informasi yang selalu dekat menjadi faktor pendorong utama berkembangnya teknologi ini (Sukmaaji, 2008).
Menurut Wardhana et al (2012), komunikasi wireless (nirkabel) yaitu koneksi antar suatu perangkat lainnya tanpa menggunakan kabel atau metode untuk mengirimkan sinyal melalui suatu ruangan bukan menggunakan kabel. Gelombang radio dan sinar infra merah biasa digunakan untuk komunikasi wireless. Dalam sistem komunikasi wireless terdapat perangkat atau bagian umum gelombang yang berperan yang menjadi bagian utuh dari sistem komunikasi ini yaitu; gelombang elektromagnetik, gelombang mikro, gelombang radio, infra merah dan satelit.
Komunikasi wireless (nirkabel) memiliki beberapa karakteristik yaitu sebagai berikut: 1. Menggunakan sebuah media antena dalam mengirim dan menerima sinyal
elektromagnetik. 2. Rentan interferensi.
3. Umumnya menggunakan frekuensi 2 GHz – 40 GHz. 4. Point to point, point to multi point, access point.
5. Semakin tinggi frekuensi yang digunakan maka semakin besar potensial bandwidth dan
rate datanya namun semakin pendek jaraknya.
Ada 3 range frekuensi umum yang dalam transmisi wireless yaitu:
1. Frekuensi microwave dengan range 2 – 40 GHz, untuk transmisi point to point.
2. Frekuensi dalam range 30 MHz – 1 GHz, untuk aplikasi omnidirectional. Range ini ditujukan untuk range broadcast radio.
3. Range frekuensi lain yaitu antara 300 – 200000 GHz untuk aplikasi lokal, adalah
spektrum inframerah. Infra merah sangat berguna untuk aplikasi point to point dan multi
point dalam area terbatas, seperti sebuah ruangan.
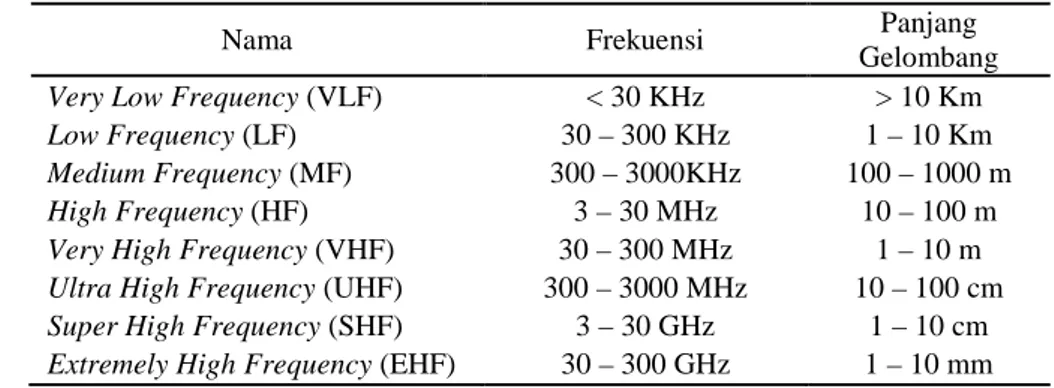
Dalam Octavian (2011), berdasarkan sifat perambatannya, frekuensi-frekuensi radio dapat dibagi dalam beberapa daerah atau band, seperti yang terlihat pada tabel berikut ini:
Tabel 2. Penggolongan frekuensi berdasarkan panjang gelombang
Nama Frekuensi Panjang
Gelombang
Very Low Frequency (VLF) < 30 KHz > 10 Km
Low Frequency (LF) 30 – 300 KHz 1 – 10 Km
Medium Frequency (MF) 300 – 3000KHz 100 – 1000 m
High Frequency (HF) 3 – 30 MHz 10 – 100 m
Very High Frequency (VHF) 30 – 300 MHz 1 – 10 m
Ultra High Frequency (UHF) 300 – 3000 MHz 10 – 100 cm
Super High Frequency (SHF) 3 – 30 GHz 1 – 10 cm
Extremely High Frequency (EHF) 30 – 300 GHz 1 – 10 mm
2.6 SPC Wireless Gamepad Interface
Smart Peripheral Controller (SPC) Wireless Gamepad Interface merupakan sebuah modul
antarmuka antara manusia dengan peralatan elektronika, robot, maupun mesin-mesin listrik lainnya. Sistem ini terdiri dari sebuah gamepad yang biasa digunakan pada console PlayStation®, sebuah modul berbasis mikrokontroler (modul TX) yang digunakan untuk membaca data-data penekanan pada tombol-tombol digital dan joystick analog di gamepad dan memancarkan data-data tersebut pada Radio Frequency (RF), serta sebuah modul berbasis mikrokontroler (modul RX) yang digunakan untuk menerima data-data yang dipancarkan tersebut dan menerjemahkannya menjadi sinyal-sinyal digital dan Pulse Width Modulation (PWM).
Adapun spesifikasi SPC Wireless Gamepad Interface sebagai berikut:
• Daya bisa diperoleh dari baterai4,8 – 5,4 Volt atau sumber catu daya lain dengan tegangan 9 – 12 V. • Bekerja pada pita frekuensi 433 Mhz.
• Jangkauan maksimum 100 m (line of sight). • Tersedia 60 kanal komunikasi.
• Autoscanning kanal komunikasi yang kosong (secara bergantian).
• Tersedia antarmuka UART untuk mengirimkan data tambahan secara wireless. • Pin Input/Output kompatibel dengan level tegangan TTL dan CMOS.
• Terdapat 2 set output PWM dengan frekuensi 300 Hz.
• Kompatibel dengan gamepad DUALSHOCK® 2 untuk PlayStation® 2.
• Mendukung 12 tombol aksi, 4 tombol arah, dan 2 joystick analog pada gamepad. • Mendukung mode getar pada gamepad.
Gambar 7. SPC Wireless Gamepad Interface
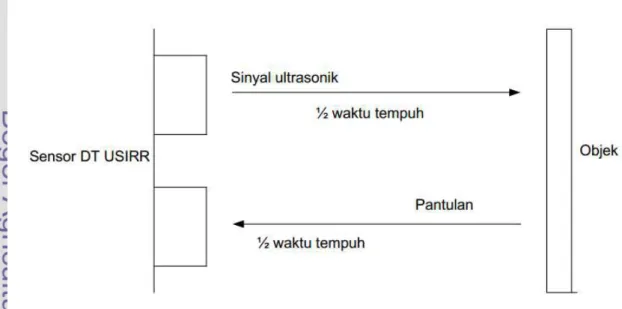
2.7 Rintangan
Menurut Saksono (2011), rintangan merupakan suatu objek yang tidak diharapkan ada yang akan menghambat proses suatu pengerjaan. Dalam hubungannya dengan smart tractor, rintangan yang mungkin ada atau muncul dalam lahan adalah dapat berupa pohon, galangan, batu besar, lubang besar, dan juga berupa objek lain yang akan memberikan efek hambatan terhadap laju traktor di lahan.
Menurut Robert et al (1999), Rintangan sebagai sesuatu yang akan menyebabkan perilaku yang tidak diinginkan atau berbahaya jika terkena kendaraan yang dipasang sistem deteksi hambatan. Ada tiga kelas umum yang termasuk rintangan yaitu orang-orang, kendaraan lain, dan hambatan jalan lainnya. Kelas ketiga dari rintangan dapat mencakup apa pun dari batu yang berada di tengah jalan yang dapat mengganggu dalam pekerjaan pengangkutan. Objek hanya boleh dipertimbangkan sebagai hambatan atau rintangan jika sebuah kendaraan mungkin akan bertabrakan dengan objek dalam waktu dekat.
Gambar 8. Traktor dengan sensor pendeteksi rintangan
Pengujian pada berbagai studi penelitian di bidang kendaraan otomatis atau robot menyebutkan bahwa ada 5 – 6 tipe sensor yang dapat digunakan sebagai pendeteksi halangan secara efektif. Sensor tersebut mulai dari harga yang murah sampai mahal dan memiliki kelebihan dan kekurangan tersendiri untuk penggunaan yang berbeda. Yang termasuk dalam sensor deteksi halangan
Rintangan
► ◄
atau rintangan adalah CCD Camera, Ultrasonic Sensors, Scanning Laser, 3D Scanning Lasers, and
Millimeter Wave Radar(Gray,2000).
2.8 Sensor Ultrasonik
Gelombang ultrasonik adalah gelombang dengan besar frekuensi gelombang suara (speech
signals) yaitu lebih dari 20 KHz. Gelombang ultrasonik dapat merambat dalam medium padat, cair
dan gas. Reflektivitas dari gelombang ultrasonik ini di permukaan cairan hampir sama dengan permukaan padat, tapi pada tekstil dan busa, jenis gelombang ini akan diserap. Cepat rambat gelombang ultrasonik di udara adalah 344 m/s.
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara, dimana sensor menghasilkan gelombang suara yang kemudian menangkapnya kembali dengan perbedaan waktu sebagai dasar peinderaannya. Sensor ultrasonik terdiri dari rangkaian pemancar ultrasonik yang disebut transmitter dan rangkaian penerima ultrasonik atau receiver (Sidauruket. al, 2011). Struktur unit pemancar dan penerima sangat sederhana, sebuah Kristal piezoelectric dihubungkan dengan mekanik jangkar dan hanya dihubungkan dengan diafragma penggetar. Tegangan bolak – balik yang memiliki frekuensi kerja 40 KHz – 400 KHz diberikan pada plat logam. Struktur atom dari Kristal piezoelectric akan berkontraksi, mengembang atau menyusut terhadap polaritas dengan efek piezoelectric (Hani, 2010).
Menurut Sidauruket. al (2011), prinsip kerja sensor ultrasonik adalah sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi di atas 20 KHz, biasanya yang digunakan untuk mengukur jarak benda adalah 40 KHz. Sinyal yang dipancarkan tersebut kemudian akan merambat sebagai sinyal/gelombang bunyi dengan kecepatan bunyi yang berkisar 340 m/s. sinyal tersebut kemudian akan dipantulkan dan diterima kembali oleh bagian penerima ultrasonik. Setelah sinyal sampai di penerima ultrasonik, lalu akan diproses untuk menghitung jaraknya. Jarak dihitung berdasarkan persamaan: S=340.t/2, dimana S adalah jarak antara sensor ultrasonik dengan bidang pantul, dan t adalah selisih waktu antara pemancaran gelombang ultrasonik sampai diterima kembali oleh bagian penerima ultrasonik.
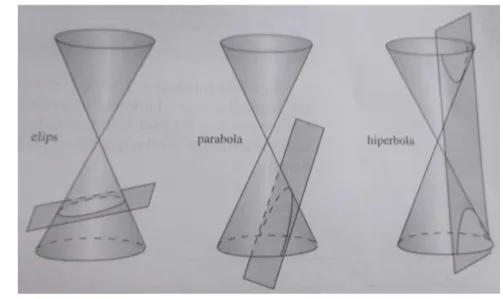
2.9 Silinder Parabolik
Menurut Adiyanto (2008), Parabola merupakan irisan kerucut yang berbentuk kurva yang dihasilkan oleh perpotongan menyilang yang sejajar terhadap permukaan kerucut (Gambar 10).Sedangkan dalam matematika seperti yang di kemukakan oleh Stewart (2003), sebuah parabola merupakan himpunan titik-titik di suatu bidang yang berjarak sama dari suatu titik tetap F (disebut titik fokus) dan garis tetap (disebut direktriks). Definisi ini diilustrasikan oleh Gambar 11, pada gambar tersebut titik tengah di antara fokus dan direktriks terletak pada parabola; titik ini disebut titik puncak. Garis yang melalui fokus dan tegak lurus terhadap direktriks disebut sumbu parabola.
Gambar 10. Irisan Kerucut
Gambar 11. Bagian Parabola
Berdasarkan teorema dalam kalkulus (Stewart,2003), Misalkan pada Gambar 11. F titik tetap (disebut fokus), l garis tetap (disebut direktriks) pada suatu bidang dan e bilangan positif tetap (disebut eksentrisitas). Himpunan semua titik P pada bidang sedemikian rupa sehingga
(yakni, rasio jarak dari F terhadap jarak dari kerucut merupakan sebuah elips jika
Dari gambar di atas dapat diketahui persamaan polar untuk sebuah parabola adalah:
Penguatan antena
panjang gelombang dari sinyal yang dipancarkan, dan perkiraan efisiensi antena parabola dihitung sebagai
memancarkan sinyal sama di patokan yang mana kebanyakan dengan satuan desibel isotropic penguatan antena parabolik
Dimana:
G = penguatan antena
k = faktor efisiensi yang umumnya sekitar 50% sampai 60% D = diameter reflektor
λ = panjang gelombang sinyal
|PF| |P |
(yakni, rasio jarak dari F terhadap jarak dari l adalah konstanta e) adalah suatu irisan kerucut. kerucut merupakan sebuah elips jika e<1, parabola jika e=1, dan hiperbola jika
Gambar 12. Skematik Parabola
ari gambar di atas dapat diketahui persamaan polar untuk sebuah parabola adalah:
1 cos
Penguatan antena parabolik dapat dihitung dengan mudah dari diameter parabola ( panjang gelombang dari sinyal yang dipancarkan, dan perkiraan efisiensi antena
parabola dihitung sebagai penguatan atas sumber isotropik, yaitu relatif
sinyal sama di segala penjuru. Ini adalah sumber teoritis yang digunakan sebagai patokan yang mana kebanyakan antena dibandingkan, penguatan dilambangkan dengan G (Gain) isotropic (dB). Persamaan standar yang dapat digunakan untuk menghitung parabolik adalah:
G 10 log 10k πD
λ
antena parabolik (dBi)
faktor efisiensi yang umumnya sekitar 50% sampai 60%. reflektor parabolik (m)
panjang gelombang sinyal (m)
) adalah suatu irisan kerucut. Irisan jika e>1.
ari gambar di atas dapat diketahui persamaan polar untuk sebuah parabola adalah:
dengan mudah dari diameter parabola (D), antena. Penguatan Reflektor f terhadap sumber yang ah sumber teoritis yang digunakan sebagai dibandingkan, penguatan dilambangkan dengan G (Gain) Persamaan standar yang dapat digunakan untuk menghitung