PERANCANGAN KONTROLER KNOWLEDGE BASE
UNTUK PENGATURAN POSISI ROBOT SCARA
1,Indah Sulistiyowati, 2, Izza Anshory
1,2
Program Studi Teknik Elektro Universitas Muhammadiyah Sidoarjo
ABSTRACT
The industrial robot is a programmable mechanical manipulator, capable of moving along several directions, equipped at its end with a work divice called the end effector. In this thesis, end effector of SCARA has pendulum. The problem is dirivation caused by swing of pendulum. To minimize that derivation, robot position would controlled by knowledge base.
The variable would controlled was velocity. Control signal was produce by controller was usud to control robot position. This jont trajectory were input from pendulum that mapping to x axis and y axis. The diagram block controller robot position SCARA with pendulum has projecting by simulink.
To minimize the torsion between robot arm, the need coordination. To decide velocity coordination of arm robot, has to plan coordination controller.
1.
PENDAHULUAN
Salah satu bidang yang mempengaruhi robotik adalah pengembangan teknologi terapan. Penelitian di bidang ini biasanya berakar dari industri, untuk memecahkan masalah industri dengan teknologi yang ada. Kadang-kadang memang pengembangan dilakukan karena teknologi sekarang belum mampu memberikannya, tetapi seringkali pula teknologi yang ada dikembangkan untuk memecahkan masalah-masalah yang timbul. Satu contohnya adalah dalam perakitan robot. Robot perlu luwes secara horizontal untuk memungkinkan bermacam komponen dapat dirakit, tapi bersifat kaku secara vertical agar komponen dapat disisipkan apabila diperlukan.
Robot yang ada tidak dapat memenuhi keinginan sebab kebanyakan robot luwes secara vertical akibat tumpuan beban pada sambungan putaran. Pembebanan horizontal yang ada tidak cukup efisien untuk dikirimkan sampai ujung gerakan. Pemecahan yang digunakan sangat sederhana dan efektif, serta tidka memerlukan teknologi baru. Sederhana sekali, robot tinggal diputar 90 derajat dan lahirlah robot SCARA (Selective Compliant Assembly Robot Arm). Dengan konfigurasi baru ini semua tumpuan beban sekarang berada pada bidang horizontal dan robot kaku pada bidang vertical.
Kecakapan robot sangat tergantung pada piranti yang dipasang pada lengan robot, dimana piranti ini dikenal sebagai end effector. Banyak sekali jenis end effector untuk robot, dimana sebagian besar adalah sesuai dengan persyaratan pihak pemakai.
Disini pada end effector robot SCARA diberikan sebuah bandul. Permasalahan yang kemudian muncul adalah simpangan yang terjadi akibat ayunan dari bandul ketika robot SCARA digerakkan. Untuk meminimisasi simpangan dari ayunan bandul tersebut akan dilakukan dengan cara mengatur posisi robot. Adapun controller yang akan digunakan adalah kontroler knowledge base.
2.
DASAR TEORI
2.1.Persamaan Dinamika Robot SCARA
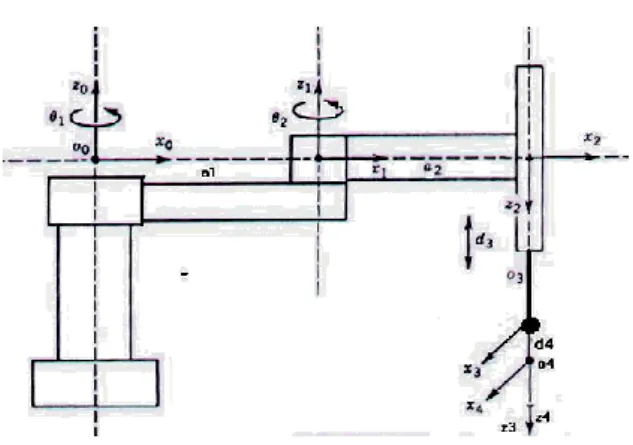
Dari gambar dibawah Diketahui: Li = Panjang dari link i (meter)
mi = Massa dari link i (kilogram)
Iuui = Massa dari momen inersia dari link i
dari axis u (kg-m-m) Si = sin qi dan Ci = cos qi
Gambar 1. Manipulator SCARA
Maka persamaan dinamik robot SCARA empat derajat kebebasan : 4 44 0 34 4 3 33 4 24 0 23 2 2 4 3 42 ) 4 3 2 ( 22 4 14 0 13 2 2 1 ) 4 3 2 ( 2 2 4 3 42 ) 4 3 2 ( 12 2 2 4 3 4 2 2 2 1 4 3 3 2 2 2 1 4 3 2 41 ) 4 3 2 1 ( 11 zz I m m m m m zz I m m L m m m zz I zz I zz I m zz I m m C L L m m L m m m zz I zz I zz I m L m m m C L L m m m L m m m zz I zz I zz I zz I m
0
)
(
2
)
2
4
(
2
4 4 3 3 2 1 2 2 1 4 3 2 2 2 1 2 1 4 3 2 1 2 1 3 2 1
n
g
m
m
n
q
S
L
L
m
m
m
n
q
q
L
L
m
m
q
L
L
m
m
n
2.2.Teori Bandul
2.2.1. Kecepatan Bandul
Kecepatan bandul (Vb) = Kecepatan lengan (V) + kecepatan linier bandul karena adanya ayunan (l cos ) Vb lcos l l F V
Gambar 2. Kecepatan bandul yang diperoleh
2.2.2. Tegangan Tali
Tali yang salah satu ujungnya diberi massa (m) dan ujung yang lain terikat pada satu titik, maka tali menjadi tegang yang disebabkan karena bekerjanya beberapa gaya. Besarnya tegangan pada tali dapat dihitung sebagai berikut:
Tegangan tali = akibat gaya berat benda T1,
gambar (a) + akibat gaya damper T3, gambar(b) +
akibat gaya sentrifugal T2, gambar (c).
Gambar 3. Macam-macam Tegangan tali
2.2.3. Pengaruh gaya pada bandul
Menghitung pengaruh gaya pada system bandul terhadap kecepatan bandul (Vb), sudut
simpangan () dan kecepatan sudut() seperti pada gambar 4. ab aT Vb T F FT=Fsin
Gambar 4. Gaya yang bekerja pada bandul
Dengan
F = m.aT (2.3)
ab = aT Sin (2.4)
F sin = T = mg cos + BVbsin +
mVb2(cos)2/l (2.5)
F Sin - T = m.aT, jika kedua sisi dikalikan dengan
sin maka,
Fsin2 - Tsin = maTsin = mab (2.6)
Sehingga : ab =
m
T
F
m
sin
sin
1
2
(2.7) (2.8) dimana ab = dVb/dt =V
b, maka : (2.9) maka:
sin
cos
cos
l
l
V
V
l
V
S
b b
(2.10) & (2.11)Dari persamaan diatas dapat diketahui hubungan gaya (F) pada system bandul terhadap kecepatan bandul (Vb), sudut simpangan () dan
kecepatan sudut(), terdapat hubungan antara perubahan nilai tiga variabel tersebut berbanding lurus dengan perubahan besarnya gaya yang diberikan.
2.3.Teori Basis Pengetahuan
Basis pengetahuan berisi fakta-fakta tentang
objek dalam domain yang ditentukan dan hubungannya satu sama lain. Basis pengetahuan juga berisi pikiran, teori, prosedur praktis dan hubungannya satu sama lain. Basis pengetahuan merupakan informasi terorganisasi dan teranalisis agar bisa lebih mudah dimengerti dan bisa diterapkan pada pemecahan masalah dan pengambilan keputusan.
Dalam sistem pakar (expert system), penyelesian suatu problema dapat digambarkan seperti pada gambar 5.
Gambar 5. Diagram blok penyelesaian problema sistem pakar (expert system)
Mesin inferensi melakukan pelacakan, menyocokkan kaidah dalam basis pengetahuan terhadap informasi yang ada di dalam basis data. Bila setiap kaidah bisa merubah isi basis data, maka status masalah akan diperbaiki. Fakta baru tersedia untuk digunakan dalam proses pengambilan keputusan, Selanjutnya, fungsi khusus seperti permintaan penambahan informasi dari user dapat diberikan.
Dalam melacak keadaan, rule interpreter dapat melakukan dua macam pendekatan dasar, yaitu
forward chaining dan backward chaining. Dalam
forward chaining, rule interpreter mencocokkan fakta atau statement dalam basis data dengan situasi yang dinyatakan dalam bagian sebelah kiri atau kaidah IF. Bila fakta yang ada itu sudah sesuai dengan kaidah IF, maka kaidah distimulasi.
Pada backward chaining, rule interpreter mulai dari fakta yang ada dalam basis data, yaitu hipotesa. Rule interpreter kemudian mulai menguji kaidah sebelah kanan, yaitu bagian THEN untuk mencari yang sesuai. Mesin inferensi melacak bukti-bukti yang mendukung hipotesa awal. Jika ternyata cocok, maka basis data berfungsi sebagai pencatat kondisi atau premis yang diperbaharui yang mendukung kesimpulan yang sesuai.
Gambar 6. Model Japanese FGCS hubungan antara knowledge base machnie, data base machine dan inference machine
Dalam pembahasan ini, data yang akan diolah tidak terlalu besar, sehingga penyelesian problema akan didekati dengan menggunakan model
Japanese FGCS seperti pada gambar 6.
Dalam penulisan ini, basis pengetahuan (knowledge base) dianggap terdiri dari basis data (data base) dan aturan-aturan dasar (rule base), dan
representasi pengetahuan yang digunakan adalah representasi dengan sistem rule-base.
2.4.Kontroler
Kontroler mengolah sinyal eror untuk menghasilkan suatu sinyal kontrol yang merepresentasikan tindakan yang harus diambil ketika harga variabel yang dikontrol mengalami penyimpangan dari set-point. Cara bagaimana kontroler menghasilkan sinyal kontrol dinamakan
aksi kontrol atau mode kontrol. Mode kontroler biasanya dibagi dua, yaitu kontroler diskontinyu
(misalnya kontroler dua posisi/ON-OFF dan multi posisi) dan kontroler kontinyu (misalnya kontroler PID).
Metode yang akan digunakan dalam penelitian ini dalam menentukan output kontroler pada eror tertentu adalah dengan mencari basis data yang merupakan bagian dari basis pengetahuan dengan cara membandingkan respon model/performansi yang diinginkan dengan respon plant pada sampling tertentu kemudian dikalikan dengan input step dari plant.
3.
PERANCANGAN SISTEM
3.1.Perancangan Kontroler
Kontroler yang telah dirancang akan diimplementasikan dalam bentuk simulasi pada “plant simulasi” (plant orde-satu dan orde-dua), dan lengan robot dengan beban bandul.
Blok diagram sistem pengaturan untuk “plant simulasi” diperlihatkan pada gambar 7. Pada
“plant simulasi” orde-satu, input kontroler adalah eror (e) dan output kontroler adalah sinyal kontrol (u).
Gambar 7. Blok diagram sistem pengaturan “plant simulasi”
Pada plant “manipulator robot”, variabel yang dikontrol adalah kecepatan ayunan bandul. Maka sinyal kontrol yang dihasilkan oleh kontroler akan digunakan untuk mengatur trayektori joint dari lengan robot. Selanjutnya trayektori joint tersebut merupakan input dari bandul yang masing-masing memetakan terhadap sumbu x dan sumbu y. Blok diagram pengaturan posisi robot SCARA dengan beban bandul yang dirancang dengan menggunakan simulasi program (simulink) diperlihatkan dibawah ini.
Gambar 8. Blok diagram pengaturan posisi robot SCARA dengan beban bandul
3.2.Perancangan Knowledge Base Koordinator
Bila dua buah lengan robot yang saling berhubungan dengan masing-masing lengan mempunyai penggerak motor dijalankan, maka akan timbul torsi yang saling mempengaruhi antar gerbong. Dengan mempertimbangkan kehadiran torsi dari lengan lain maka beban torsi masing-masing berubah yang mengakibatkan perubahan, sehingga perlu dilakukan koordinasi. Dalam menentukan koordinasi kecepatan lengan robot perlu dirancang sebuah kontroler koordinasi. Perancangan kontroler koordinasi diawali dengan prediksi sinyal kontrol dan output yang dihasilkan oleh plant pada kecepatan nominal artinya kecepatan lengan 1 dan 2 sama besar. Dari prediksi tersebut akan menghasilkan sejumlah data yang dijadikan sebagai model dari system.
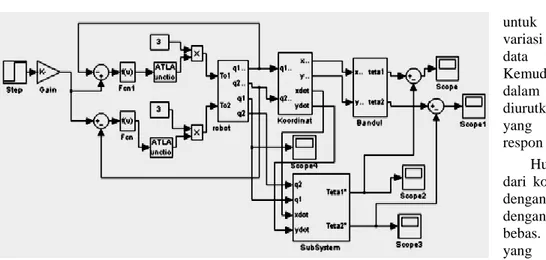
Gambar 9. Diagram Skematik Koordinator Knowledge Base
Variasi perubahan kecepatan yang dilakukan pada pengujian ini sebanyak tujuh kali yaitu dengan satu kali untuk kecepatan nominal dan enam kali pada kecepatan yang berbeda. Dari hasil pengujian ini kecepatan nominal dijadikan sebagai model dari system yang diinginkan. Untuk mencari hubungan fungsional antara input dan output koordinasi dilakukan regresi dari sejumlah data pengujian dengan cara menggabungkan masing-masing data
untuk u1, u2, e1, e2 dari
variasi kecepatan menjadi data dalam satu tabel. Kemudian data yang ada dalam satu tabel tersebut diurutkan nilainya agar data yang dihasilkan seperti respon yang diinginkan.
Hubungan fungsional dari koordinasi dapat dicari dengan regresi berganda dengan empat variabel bebas. Regresi berganda yang disajikan dalam permasalahan ini adalah model orde satu tanpa interaksi.
3.3.Kinematika Kecepatan
Untuk menentukan kecepatan yang diinginkan maka dilakukan penghitungan kecepatan berdasarkan kinematika kecepatan pada gambar 10.
a2 a1 y x 2 1
Gambar 10. Kinematika Kecepatan
Dengan[1]:
x = a1cos1 + a2cos(1 + 2) (3.6)
y = a1sin1 + a2sin(1 + 2) (3.7)
dengan menggunakan notasi
y
x
x
dan
2 1
4.
PENGUJIAN DAN ANALISIS DATA
4.1.Pengujian Dengan “Plant Simulasi”
Pada pengujian dengan “plant simulasi”, dimisalkan suatu plant yang diketahui model matematisnya. Kemudian dirancang suatu kontroler sesuai dengan prosedur pada bagian (3.1) yang diharapkan dapat mengontrol plant tersebut.
Adapun robot SCARA seperti pada gambar (12) yang digunakan mempunyai data seperti dibawah:
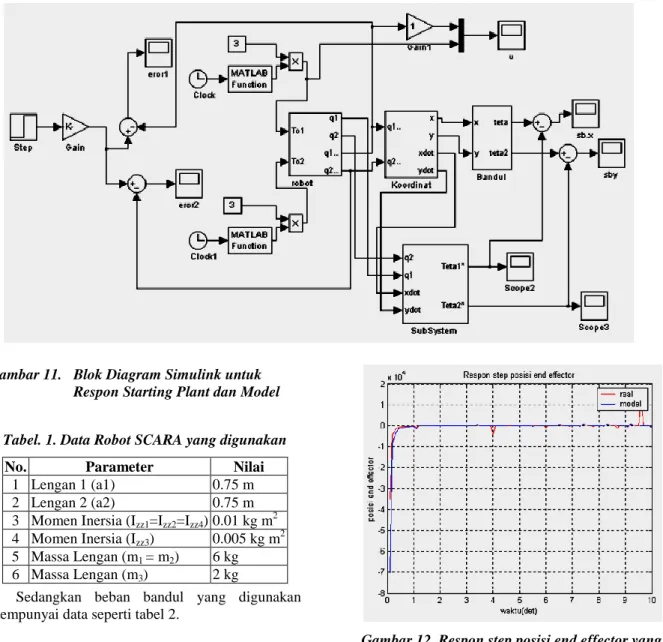
Gambar 11. Blok Diagram Simulink untuk Respon Starting Plant dan Model
Tabel. 1. Data Robot SCARA yang digunakan
No. Parameter Nilai
1 Lengan 1 (a1) 0.75 m 2 Lengan 2 (a2) 0.75 m 3 Momen Inersia (Izz1=Izz2=Izz4) 0.01 kg m2 4 Momen Inersia (Izz3) 0.005 kg m2 5 Massa Lengan (m1 = m2) 6 kg 6 Massa Lengan (m3) 2 kg
Sedangkan beban bandul yang digunakan mempunyai data seperti tabel 2.
Tabel 2. Data Bandul yang digunakan
No. Parameter Nilai
1 Massa bandul (m4) 0.5 kg
2 Panjang tali (lb) 0.75 m
Selanjutnya respon step plant robot SCARA diperoleh dengan menjalankan diagram simulink dibawah ini.
Jika model yang diinginkan berupa sistem orde satu dengan konstanta waktu = 10 det, maka diperoleh respon model dan plant seperti pada gambar 12 dan hubungan antara sinyal kontrol dengan eror diperlihatkan gambar 13.
Pada gambar 12. Dapat diperoleh dengan menjalankan diagram simulink pada gambar 11, dimana terlihat respon posisi end effector yang akan dikontrol dan model yang diinginkan.
Gambar 12. Respon step posisi end effector yang akan dikontrol dan model yang diinginkan
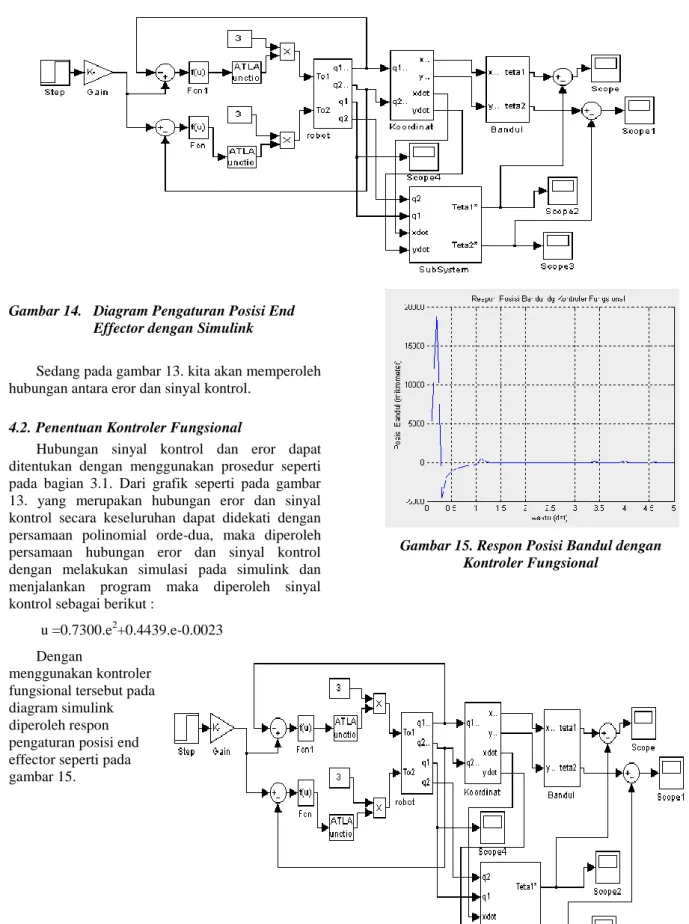
Gambar 14. Diagram Pengaturan Posisi End Effector dengan Simulink
Sedang pada gambar 13. kita akan memperoleh hubungan antara eror dan sinyal kontrol.
4.2.Penentuan Kontroler Fungsional
Hubungan sinyal kontrol dan eror dapat ditentukan dengan menggunakan prosedur seperti pada bagian 3.1. Dari grafik seperti pada gambar 13. yang merupakan hubungan eror dan sinyal kontrol secara keseluruhan dapat didekati dengan persamaan polinomial orde-dua, maka diperoleh persamaan hubungan eror dan sinyal kontrol dengan melakukan simulasi pada simulink dan menjalankan program maka diperoleh sinyal kontrol sebagai berikut :
u =0.7300.e2+0.4439.e-0.0023 Dengan
menggunakan kontroler fungsional tersebut pada diagram simulink diperoleh respon pengaturan posisi end effector seperti pada gambar 15.
Gambar 15. Respon Posisi Bandul dengan Kontroler Fungsional
Gambar 16. Diagram Pengaturan Posisi Robot SCARA Tanpa Koordinasi
4.3.Pengujian Robot SCARA Tanpa Koordinasi
Disini akan dilakukan pengujian terhadap posisi robot SCARA dengan beban bandul tanpa koordinasi, termasuk berbagai perubahan lebar dari torsi untuk mencari parameter dari berbagai kontroler tanpa koordinasi yang akan disajikan. Di bawah ini merupakan blok diagram untuk system tanpa koordinasi.
Sebagai referensi atau model masing-masing lengan kita beri lebar kecepatan yang sama. Dari sini diamati masing-masing sinyal kontrol (u) dan eror (e). Hasil simulasi pengujian untuk bandul pada sumbu x dan y tanpa koordinasi adalah sebagai berikut:
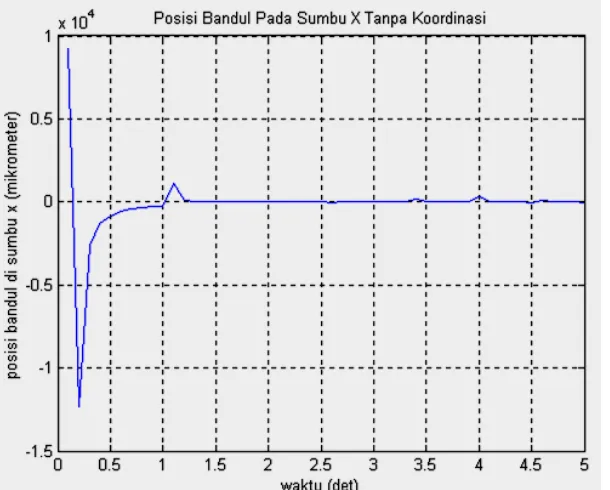
Gambar 17. Respon posisi bandul pada sb.x tanpa koordinasi
Gambar 18. Respon posisi bandul pada sb.y tanpa koordinasi
Setelah didapatkan data pada kecepatan nominal, selanjutnya dilakukan simulasi pengujian dengan variasi lebar kecepatan yang berbeda-beda. Kemudian data yang diperoleh kita jadikan satu data sehingga kita bisa membentuk koordinator.
4.4.Pengujian Robot SCARA dengan
Koordinasi
Setelah system tanpa koordinasi disimulasikan dengan berbagai variabel lebar dari torsi dan hasil dari seluruh data yang telah diurutkan digunakan untuk mencari parameter-parameter dari berbagai kontroler koordinasi yang akan disajikan. Koordinasi yang dirancang terdiri dari model orde satu tidak ada interaksi dan model orde dua tidak ada interaksi.
Gambar 19. Diagram Pengaturan Posisi Robot SCARA dengan Koordinasi
4.5.Koordinasi Model Orde Satu Tidak Ada
Interaksi
Dari data yang diperoleh dengan menjalankan diagram simulink pada gambar 16, maka dapat dicari parameter-parameter dari koordinasi untuk masing-masing u1 dan u2 dengan estimasi
kuadrat terkecil. Sesuai dengan rumus pada (3.4) dan (3.5) yang kita terapkan pada program, maka persamaan yang dihasilkan untuk koordinasi model orde satu tidak ada interaksi adalah sebagai berikut:
(4.1)
(4.2)
Kemudian dari kedua persamaan diatas dibuat menjadi program simulink untuk rancangan kontroler koordinasi model orde satu tidak ada interaksi
Dengan menggunakan koordinasi model orde satu tidak ada interaksi dan lebar torsi kecepatan masing-masing 10 maka diperoleh respon pengaturan posisi bandul pada gambar dibawah ini.
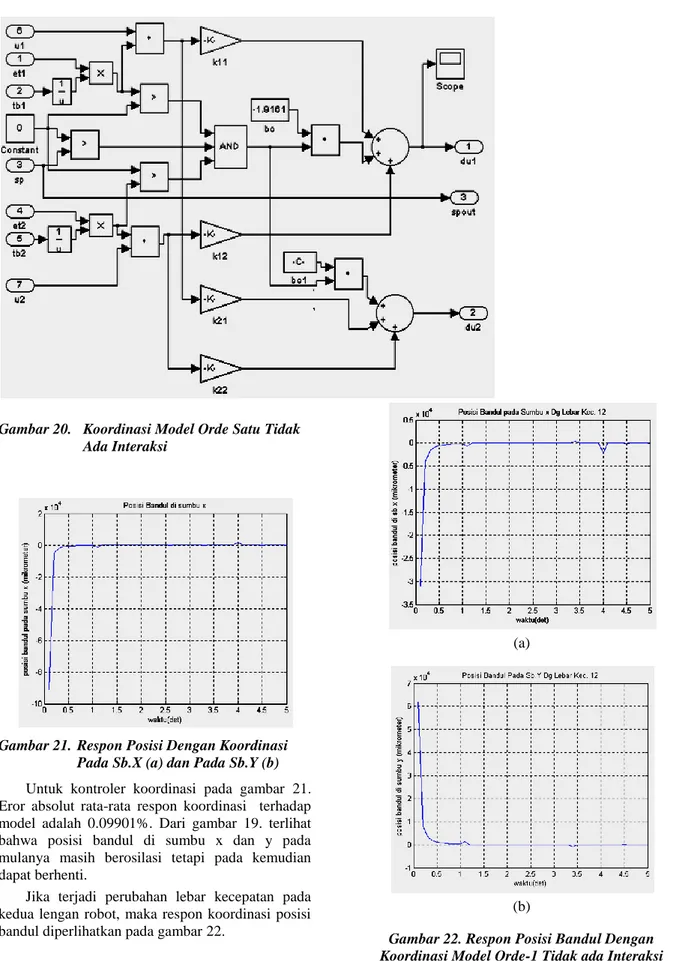
Gambar 20. Koordinasi Model Orde Satu Tidak Ada Interaksi
Gambar 21. Respon Posisi Dengan Koordinasi Pada Sb.X (a) dan Pada Sb.Y (b)
Untuk kontroler koordinasi pada gambar 21. Eror absolut rata-rata respon koordinasi terhadap model adalah 0.09901%. Dari gambar 19. terlihat bahwa posisi bandul di sumbu x dan y pada mulanya masih berosilasi tetapi pada kemudian dapat berhenti.
Jika terjadi perubahan lebar kecepatan pada kedua lengan robot, maka respon koordinasi posisi bandul diperlihatkan pada gambar 22.
(a)
(b)
Gambar 22. Respon Posisi Bandul Dengan Koordinasi Model Orde-1 Tidak ada Interaksi
Jika terjadi Perubahan Lebar Kecepatan 12 (a). Pada Sumbu X
Pada Gambar 22. dapat kita lihat bahwa jika terjadi perubahan lebar kecepatan maka posisi bandul baik pada sumbu x dan sumbu y terdapat sedikit osilasi meski berhasil direm sehingga pada akhirnya bandul berhenti.
5.
KESIMPULAN
5.1.Kesimpulan
Dari hasil simulasi dengan menggunakan simulink dapat disimpulkan sebagai berikut: i. Hasil simulasi menunjukkan jika pengaturan
posisi robot scara dengan beban bandul dengan mengatur kecepatan end effector bellshape maka simpangan ayunan bandul akan terminimalisasi baik pada sumbu x ataupun sumbu y
ii. Dengan menggunakan kontroler knowledge base maka posisi bandul dapat diatur pengeremannya.
iii. Dengan menggunakan sistem koordinasi yang didesain pada simulasi pengaturan plant, maka pengaturan posisi bandul baik pada sumbu x atau sumbu y jauh lebih baik daripada tanpa koordinasi.
5.2. Saran
Untuk memperoleh fungsi pendekatan yang tepat untuk pengaturan suatu plant, dibutuhkan banyak data pengujian untuk kondisi-kondisi yang mungkin terjadi dalam system yang akan dikontrol.
Teknik yang telah digunakan dalam penelitian ini kiranya dapat diimplementasikan kedalam bentuk pengaturan posisi robot SCARA dengan beban bandul dan perlu dilakukan perbandingan dengan penyelesaian yang telah dikembangkan
DAFTAR PUSTAKA
1. Spong, M., dan Vidyasagar,M (1989),” Robot Dynamics and Control”, Canada, John Wiley
and Sons Inc.
2. Haralic, M Robert dan Shapiro, G Linda (1993),” Computer and Robot Vision Volume II”, Addison Wesley Publishing Company, Inc.
3. Ignizio, James P.,(1991),“ Introduction to Expert System”, Mc.Graw Hill
4. Lewi, Rusdhianto Effendi
(2001),”Perancangan Kontroler Ninlinier Berbasis Pengetahuan untuk Mengatur Kecepatan Putaran Motor Induksi Tiga Fasa”, Thesis ITS
5. Fitzgerald, Kingsley and Kusko, (1982), “Electric Machinary, 3rd ed”, Mc Graw Hill 6. Philips, Charles L and H. Troy Nagle, (1995),
“Digital Control System Analysis and Design, 3rd ed”, Prentice Hall, Inc, New Jersey