Rancang Bangun Sistem Kendali Lampu Jarak Jauh Berbasis Arduino Uno dan Ethernet Shield
Qatrun Nada, Aulia Rahman, Yunidar, dan Roslidar
Jurusan Teknik Elektro dan Komputer, Fakultas Teknik, Universitas Syiah Kuala Jl. Tgk. Syech Abdulrrauf No.7 Darussalam, Banda Aceh 23111, Indonesia
email: [email protected]
I. PENDAHULUAN
Perkembangan teknologi yang semakin maju membuat pengendalian intensitas cahaya lampu dapat dilakukan melalui jarak jauh. Sistem kendali jarak jauh (remote control system) merupakan kumpulan dua perangkat pengendali yang saling terhubung, yaitu pengendali lokal dan pengendali sisi jauh. Pengendali lokal yaitu bagian pengendali oleh operator dimana pengontrol diberikan akses oleh pengendalinya. Sedangkan pengendali sisi jauh yaitu bagian yang berhubungan langsung dengan komponen yang dikendalikan [1].
Beberapa penelitian sistem kendali jarak jauh telah dilakukan sebelumnya. Pada [2], digunakan sistem komunikasi SMS untuk pengendalian peralatan elektronik rumah pintar. Penggunaan komunikasi SMS (Short Message Services) dalam sistem pengendalian dapat dilakukan dari berbagai tempat, akan tetapi pengguna harus memberikan perintah pengendalian terlebih dahulu melalui sistem SMS. Implementasi sistem bluetooth menggunakan android dan arduino untuk kendali peralatan elektronik dipaparkan pada [3]. Penerapan media bluetooth untuk mengendalikan peralatan elektronik memiliki keterbatasan jarak, sehingga kurang efektif untuk mengendalikan dan melakukan pemantauan peralatan elektronik melalui jarak jauh. Kedua penelitian tersebut
bertujuan untuk dapat melakukan aktivasi terhadap perangkat yang dikendalikan.
Pada [4], penelitian tentang fuzzy pada implementasi pengendalian lampu otomatis berbasis Arduino menggunakan metode fuzzy logic. Namun karena hanya menggunakan satu buah sensor LDR, hasil deteksi LDR kurang akurat.
Berdasarkan masalah tersebut, maka diperlukan suatu rancangan sistem kendali lampu jarak jauh dengan menggunakan Ethernet Shield. Sistem kendali ini dirancang menggunakan mikrokontroler Arduino Uno sebagai pengendali yang menerapkan logika fuzzy, dan Ethernet Shield untuk menghubungkan mikrokontroler dengan jaringan internet. Sistem dilengkapi dengan modul driver dan LDR. Modul driver bekerja untuk menggerakkan lampu berdasarkna PWM. LDR sebagai umpan balik sistem yang berfungsi untuk mendeteksi cahaya ruangan sehingga sistem dapat menyalakan lampu secara otomatis dengan intensitas cahaya yang berbeda.
Dengan demikian pemakaian lampu lebih efisien dan sesuai dengan kebutuhan.
Sistem kendali lampu jarak jauh yang telah dirancang mampu mengendalikan lampu dari jarak jauh, seperti menyalakan, mematikan, dan mengatur intensitas cahaya lampu secara otomatis berdasarkan kondisi ruangan.
Abstrak— Artikel ini memaparkan sistem kendali jarak jauh terhadap intensitas cahaya lampu pada suatu ruangan. Pengendalian dilakukan melalui web sebagai user interface yang terdapat pada smartphone dengan cara mengakses alamat IP sistem. Adapun tampilan user interface pada web ialah tombol-tombol kendali yang memiliki fungsi berbeda-beda, yaitu tombol on untuk menyalakan lampu, tombol off untuk mematikan lampu, dan tombol auto untuk menyalakan lampu secara otomatis menggunakan metode logika fuzzy. Logika fuzzy akan menghasilkan nilai PWM untuk menyalakan lampu yang bervariasi berdasarkan hasil baca sensor LDR. Semakin rendah intensitas cahaya maka semakin rendah hasil baca sensor LDR dan semakin tinggi nilai PWM yang diperoleh. Sistem yang dirancang berhasil mengendalikan lampu berdasarkan input tombol kendali. Sistem dapat diakses dari jarak jauh selama sistem terhubung dengan jaringan wireless router.
Kata kunci: sistem kendali jarak jauh, ethernet shield, logika fuzzy
Abstract— This article describes a remote-control system of the light intensity in a room. The controlling is done via the web as the user interface installed on a smartphone device by accessing the system's IP address. The user interface display on the web are control buttons that have different functions, the ON button to turn on the lights, the OFF button to turn off the lights, and the AUTO button to turn on the lights automatically using the fuzzy logic method.
Fuzzy logic produces a PWM value to turn on the lights that vary based on the LDR sensor readings. The lower light intensity causes the lower reading result of LDR sensor and the higher PWM value obtained. The designed system successfully controls the light intensity based on the control button input. The system can be accessed as long as the system is connected to the wireless router network.
Keywords: remote control system, Ethernet shield, fuzzy logic
II. METODE
Tahapan penelitian yang dilakukan adalah mendesain arsitektur jaringan, mengatur IP sistem, merancang sistem kendali, dan melakukan perancangan sistem wiring. Alat dan bahan yang digunakan untuk penelitian ini yaitu Arduio Uno, Ethernet Shield, router, sensor LDR, lampu 10 watt, baterai 12 volt, dan transistor TIP 122.
A. Arsitektur Jaringan
Adapun desain arsitektur jaringan ditampilkan pada Gambar 1. Media komunikasi wireles yaitu tanpa kabel yang memanfaatkan jaringan dan IP router [5]. Sistem bekerja berdasarkan input tombol dari halaman pengendalian. Halaman pengendalian sebagai User Interface terdapat pada web yang dapat diakses menggunakan komputer atau smartphone berdasarkan IP yang telah diatur. Komputer terkoneksi dengan sistem menggunakan jaringan wireless dari router. Lalu router tersebut dihubungkan dengan Arduino Ethernet Shield menggunakan kabel ethernet. Ethernet shield memberi layanan akses sehingga Arduino dapat terhubung dan mengeksekusi perintah yang diberikan untuk mengendalikan lampu berdasarkan perintah kendali dan hasil baca sensor LDR [6].
B. Pengaturan IP
Alamat IP sistem yang digunakan untuk mengakses halaman kendali harus sesuai antara IP pada router dan IP yang terprogram pada Arduino. Maka perlu dilakukan pengaturan IP terlebih dahulu. Pada pengaturan IP, untuk mengetahui IP router, komputer yang digunakan harus terhubung dengan jaringan internet yang berasal dari router sistem. Saat terhubung, diperoleh IP router seperti pada Gambar 2.
Pada saat diperoleh IP router 192.168.2.30, maka pada sistem IP yang digunakan sebagai IP web yang diakses yaitu 192.168.2.31. IP dapat diakses melalui perangkat komputer ataupun smartphone menggunakan jaringan wireless dari router sistem untuk dapat mengakses halaman kendali.
Gambar 1. Rancangan arsitektur jaringan sistem
(a). IP pada router (b). IP pada sistem
Gambar 2. Pengaturan IP
C. Perancangan Sistem Kendali
IP router yang terkoneksi dengan sistem akan menampilkan halaman kendali sebagai User Interface yang berisikan tombol-tombol kendali dengan fungsi yang berbeda. Tombol tersebut yaitu OFF, ON, dan AUTO.
Gambar 3 memperlihatkan diagram blok sistem kendali jenis lingkar terbuka saat dipilih tombol ON dan OFF, karena tidak memili umpan balik sistem [7]. Akan tetapi, jika user memilih tombol AUTO, maka memiliki diagram blok kendali lingkat tertutup seperti pada Gambar 4.
Gambar 4 menjelaskan bahwa masukan sistem adalah intensitas cahaya ruangan yang dideteksi oleh sensor LDR.
LDR memiliki resistansi tinggi saat mendeteksi intensitas cahaya yang tinggi (terang), dan memiliki resistansi rendah saat mendeteksi intensitas cahaya yang rendah (gelap) [8].
Masukan dari LDR tersebut diterima mikrokontroler Arduino Uno dan Ethernet Shield untuk diproses menggunakan metode logika fuzzy. Logika fuzzy pada program arduino menggunakan library fis header yang merupakan hasil konversi sistem fuzzy pada Matlab ke Arduino Uno. Pada arduino digunakan pin analog output yang memiliki fungsi PWM (Pulse Width Modulation) dengan resolusi 8 bit, yaitu mempunyai 256 deret data dari 0 hingga 255 yang menjadi keluaran fuzzy [9]. Nilai ini akan menggerakkan driver lampu. Cahaya lampu bergabung dengan cahaya ruangan yang kemudian menjadi umpan balik sistem yang dideteksi oleh sensor LDR.
Dengan menerapkan logika fuzzy, sistem pengendalian lampu dapat bekerja secara otomatis.
D. Perancangan Sistem Fuzzy
Sistem kendali ini menerapkan metode logika fuzzy tipe mamdani. Sistem tersebut dirancang menggunakan software Matlab R2015. Logika fuzzy dapat membuat sistem bekerja secara otomatis. Adapun tahapan perancangan sistem fuzzy seperti pada Gambar 5.
Gambar 3. Diagram blok tombol ON/OFF
Gambar 4. Diagram blok sistem kendali pada tombol AUTO
Gambar 5. Tahap perancangan sistem fuzzy
Pada Gambar 5, perancangan sistem fuzzy dimulai dengan menentukan variabel yang menjadi input dan output pada sistem. Lalu menentukan himpunan fuzzy.
Kemudian menghubungkan input dan output dengan membentuk aturan sistem fuzzy. Pada tahap defuzzifikasi digunakan metode centroid, yaitu nilai keluaran dengan mengambil titik pusat berdasarkan hasil himpunan fuzzy [10]. Output sistem berupa nilai PWM yang dihubungkan ke lampu.
Logika fuzzy memiliki prinsip yang tidak kaku dan mudah dipahami. Pada penelitian ini memiliki sistem fuzzy tipe mamdani yang terdiri dari 2 input dan 1 output yang memiliki 9 aturan. Kedua input tersebut merupakan hasil baca sensor LDR, yaitu LDR1 dan LDR2 berupa bilangan desimal. Pengambilan data input dilakukan dengan mengukur intensitas cahaya pada sensor dengan menggunakan cahaya lampu DC 10 watt secara dimmer, yaitu dari tingkat kecerahan lampu paling gelap hingga paling terang terang. Jarak antara kedua sensor LDR dan lampu adalah 15 cm. Diperoleh hasil pengukuran data desimal sensor LDR terrendah bernilai 506 yaitu pada kondisi lampu paling gelap, dan data desimal sensor LDR tertinggi bernilia 828 yaitu pada kondisi lampu paling terang. Kemudian dilakukan pengelompokan input menjadi himpunan fuzzy dengan menggunakan fungsi keanggotaan trapesium dan segitiga seperti yang terlihat pada Gambar 6.
Gambar 6 menampilkan grafik fungsi keanggotaan input. Himpunan input terbagi menjadi 3 himpunan, yaitu gelap, redup, dan terang. Pada kondisi gelap, memiliki kurva berbentuk linier turun, dengan persamaan fungsi derajat keanggotaan seperti persamaan 1.
[ ] {
(1)
Sehingga untuk derajat keanggotaan Gelap memiliki persamaan:
[ ] {
Pada kondisi redup memiliki kurva berbentuk segitiga, dengan fungsi derajat keanggotaan seperti persamaan 2.
[ ] {
(2)
Gambar 6. Fungsi keanggotaan input
Sehingga untuk derajat keanggotaan redup yaitu:
[ ]
{
Sedangkan pada kondisi terang memiliki bentuk kurva naik, dengan persamaan fungsi seperti pada persamaan 3.
[ ] {
(3)
Sehingga diperoleh fungsi derajat keanggotaan terang:
[ ] {
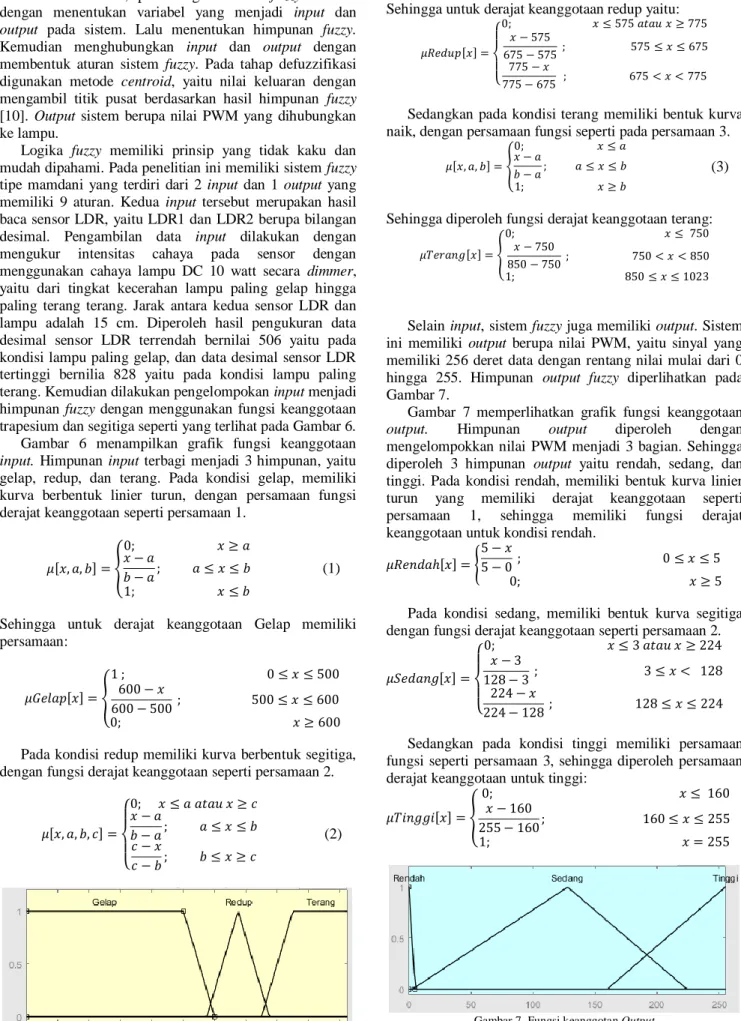
Selain input, sistem fuzzy juga memiliki output. Sistem ini memiliki output berupa nilai PWM, yaitu sinyal yang memiliki 256 deret data dengan rentang nilai mulai dari 0 hingga 255. Himpunan output fuzzy diperlihatkan pada Gambar 7.
Gambar 7 memperlihatkan grafik fungsi keanggotaan output. Himpunan output diperoleh dengan mengelompokkan nilai PWM menjadi 3 bagian. Sehingga diperoleh 3 himpunan output yaitu rendah, sedang, dan tinggi. Pada kondisi rendah, memiliki bentuk kurva linier turun yang memiliki derajat keanggotaan seperti persamaan 1, sehingga memiliki fungsi derajat keanggotaan untuk kondisi rendah.
[ ] {
Pada kondisi sedang, memiliki bentuk kurva segitiga dengan fungsi derajat keanggotaan seperti persamaan 2.
[ ] {
Sedangkan pada kondisi tinggi memiliki persamaan fungsi seperti persamaan 3, sehingga diperoleh persamaan derajat keanggotaan untuk tinggi:
[ ] {
Gambar 7. Fungsi keanggotan Output
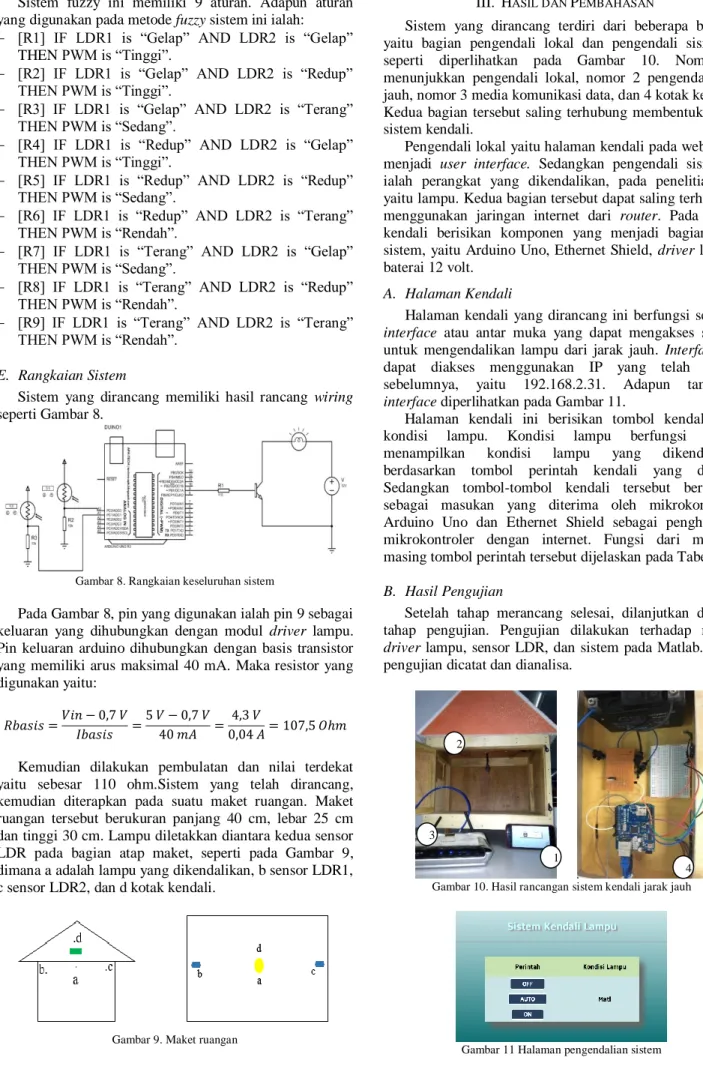
Sistem fuzzy ini memiliki 9 aturan. Adapun aturan yang digunakan pada metode fuzzy sistem ini ialah:
[R1] IF LDR1 is “Gelap” AND LDR2 is “Gelap”
THEN PWM is “Tinggi”.
[R2] IF LDR1 is “Gelap” AND LDR2 is “Redup”
THEN PWM is “Tinggi”.
[R3] IF LDR1 is “Gelap” AND LDR2 is “Terang”
THEN PWM is “Sedang”.
[R4] IF LDR1 is “Redup” AND LDR2 is “Gelap”
THEN PWM is “Tinggi”.
[R5] IF LDR1 is “Redup” AND LDR2 is “Redup”
THEN PWM is “Sedang”.
[R6] IF LDR1 is “Redup” AND LDR2 is “Terang”
THEN PWM is “Rendah”.
[R7] IF LDR1 is “Terang” AND LDR2 is “Gelap”
THEN PWM is “Sedang”.
[R8] IF LDR1 is “Terang” AND LDR2 is “Redup”
THEN PWM is “Rendah”.
[R9] IF LDR1 is “Terang” AND LDR2 is “Terang”
THEN PWM is “Rendah”.
E. Rangkaian Sistem
Sistem yang dirancang memiliki hasil rancang wiring seperti Gambar 8.
Gambar 8. Rangkaian keseluruhan sistem
Pada Gambar 8, pin yang digunakan ialah pin 9 sebagai keluaran yang dihubungkan dengan modul driver lampu.
Pin keluaran arduino dihubungkan dengan basis transistor yang memiliki arus maksimal 40 mA. Maka resistor yang digunakan yaitu:
Kemudian dilakukan pembulatan dan nilai terdekat yaitu sebesar 110 ohm.Sistem yang telah dirancang, kemudian diterapkan pada suatu maket ruangan. Maket ruangan tersebut berukuran panjang 40 cm, lebar 25 cm dan tinggi 30 cm. Lampu diletakkan diantara kedua sensor LDR pada bagian atap maket, seperti pada Gambar 9, dimana a adalah lampu yang dikendalikan, b sensor LDR1, c sensor LDR2, dan d kotak kendali.
Gambar 9. Maket ruangan
III. HASIL DAN PEMBAHASAN
Sistem yang dirancang terdiri dari beberapa bagian, yaitu bagian pengendali lokal dan pengendali sisi jauh seperti diperlihatkan pada Gambar 10. Nomor 1 menunjukkan pengendali lokal, nomor 2 pengendali sisi jauh, nomor 3 media komunikasi data, dan 4 kotak kendali.
Kedua bagian tersebut saling terhubung membentuk suatu sistem kendali.
Pengendali lokal yaitu halaman kendali pada web yang menjadi user interface. Sedangkan pengendali sisi jauh ialah perangkat yang dikendalikan, pada penelitian ini yaitu lampu. Kedua bagian tersebut dapat saling terhubung menggunakan jaringan internet dari router. Pada kotak kendali berisikan komponen yang menjadi bagian dari sistem, yaitu Arduino Uno, Ethernet Shield, driver lampu, baterai 12 volt.
A. Halaman Kendali
Halaman kendali yang dirancang ini berfungsi sebagai interface atau antar muka yang dapat mengakses sistem untuk mengendalikan lampu dari jarak jauh. Interface ini dapat diakses menggunakan IP yang telah diatur sebelumnya, yaitu 192.168.2.31. Adapun tampilan interface diperlihatkan pada Gambar 11.
Halaman kendali ini berisikan tombol kendali dan kondisi lampu. Kondisi lampu berfungsi untuk menampilkan kondisi lampu yang dikendalikan berdasarkan tombol perintah kendali yang dipilih.
Sedangkan tombol-tombol kendali tersebut berfungsi sebagai masukan yang diterima oleh mikrokontroler Arduino Uno dan Ethernet Shield sebagai penghubung mikrokontroler dengan internet. Fungsi dari masing- masing tombol perintah tersebut dijelaskan pada Tabel 1.
B. Hasil Pengujian
Setelah tahap merancang selesai, dilanjutkan dengan tahap pengujian. Pengujian dilakukan terhadap modul driver lampu, sensor LDR, dan sistem pada Matlab. Hasil pengujian dicatat dan dianalisa.
Gambar 10. Hasil rancangan sistem kendali jarak jauh
Gambar 11 Halaman pengendalian sistem 3
2
1
4
Tabel 1. Fungsi tombol perintah pada halaman kendali Tombol Fungsi tombol Kondisi
Lampu Keterangan Untuk mematikan
lampu Mati
Menginformasikan lampu dalam keadaan mati Untuk
mengotomasi lampu sesuai cahaya ruangan
Auto
Menginformasikan lampu dalam keadaan menyala
secara otomatis Untuk menyalakan
lampu tanpa pengaruh sensor
LDR
Hidup
Menginformasikan lampu dalam keadaan menyala
1) Hasil Pengujian Driver Lampu
Pengujian driver lampu seperti diperlihatkan pada Gambar 12 bertujuan untuk melihat apakah driver lampu mampu menggerakkan lampu sesuai perintah. Input modul driver ini dihubungkan pada pin 9 Arduino. Pin 9 dapat berfungsi sebagai sinyal PWM. Pengujian ini berhasil menyalakan lampu dari tingkat kecerahan terendah hingga tingkat kecerahan tertinggi.
2) Hasil Pengujian Sensor LDR
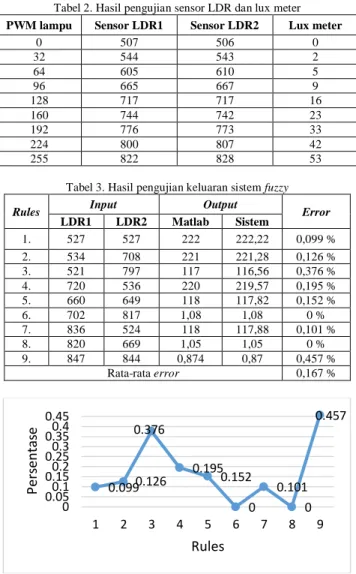
Pengujian sensor LDR dilakukan terhadap kedua sensor menggunakan cahaya lampu DC 10 watt secara dimmer, mulai dari sangat gelap (0) hingga sangat terang (255). Hasil baca sensor berupa nilai desimal. Kemudian hasil baca kedua sensor tersebut disamakan dengan hasil ukur lux meter skala 2000.
Tabel 2 menampilkan hasil pengujian sensor LDR yang kemudian dibandingkan dengan hasil ukur lux meter. Saat diberi cahaya dimmer lampu secara berkala, hasil ukur luxmeter semakin meningkat sejalan dengan meningkatnya hasil baca sensor LDR. Sehingga dapat disimpulkan bahwa sensor LDR bekerja dengan baik yang dibuktikan dengan hasil yang linier antara sensor LDR dan alat ukur lux meterterhadap kondisi yang diberikan.
3) Hasil Pengujian Sistem Fuzzy
Sistem fuzzy yang telah dirancang, kemudian diuji untuk melihat hasil keluaran sistem apakah telah sesuai dengan yang diinginkan. Untuk dapat menyimpulkan apakah sistem fuzzy ini bekerja dengan baik atau tidak, maka diperlukan hasil perbandingan yaitu dengan menggunakan software Matlab. Sistem fuzzy ini dirancang memiliki 2 input dan 1 output yang mempunyai 9 rules.
4) Hasil Pengujian Sistem Fuzzy
Sistem fuzzy yang telah dirancang, kemudian diuji untuk melihat hasil keluaran sistem apakah telah sesuai dengan yang diinginkan. Untuk dapat menyimpulkan apakah sistem fuzzy ini bekerja dengan baik atau tidak, maka diperlukan hasil perbandingan yaitu dengan menggunakan software Matlab. Sistem fuzzy ini dirancang memiliki 2 input dan 1 output yang mempunyai 9 rules.
Tabel 3 memperlihatkan hasil pengujian keluaran sistem fuzzy pada Matlab dan sistem. Sistem fuzzy ini memiliki hasil keluaran yang sesuai dengan rules yang telah ditentukan. Nilai keluaran hasil pengujian Matlab dan sistem tidak jauh berbeda.
(a) Lampu saat PWM terrendah (b) Lampu saat PWM tertinggi Gambar 12 Pengujian driver lampu
Tabel 2. Hasil pengujian sensor LDR dan lux meter PWM lampu Sensor LDR1 Sensor LDR2 Lux meter
0 507 506 0
32 544 543 2
64 605 610 5
96 665 667 9
128 717 717 16
160 744 742 23
192 776 773 33
224 800 807 42
255 822 828 53
Tabel 3. Hasil pengujian keluaran sistem fuzzy
Rules Input Output
Error LDR1 LDR2 Matlab Sistem
1. 527 527 222 222,22 0,099 %
2. 534 708 221 221,28 0,126 %
3. 521 797 117 116,56 0,376 %
4. 720 536 220 219,57 0,195 %
5. 660 649 118 117,82 0,152 %
6. 702 817 1,08 1,08 0 %
7. 836 524 118 117,88 0,101 %
8. 820 669 1,05 1,05 0 %
9. 847 844 0,874 0,87 0,457 %
Rata-rata error 0,167 %
Gambar 13. Error antara hasil pengujian Matlab dan sistem
Berdasarkan Gambar 13 dapat dilihat bahwa sistem sudah bekerja dengan baik sesuai dengan rules yang telah dibuat. Hal ini dibuktikan dengan rendahnya nilai selisih antara hasil pengujian pada MATLAB dan sistem.
Diperoleh rata-rata error antara hasil pengujian MATLAB dan sistem sebesar 0,167%. Error tersebut dimungkinkan karena pengaruh dari metode logika fuzzy yang diterapkan dan tingkat akurasi pada proses inferensi aturan logika fuzzy.
5) Hasil Kinerja Sistem
Sistem yang telah dirancang memiliki IP untuk diakses agar dapat masuk ke halaman kendali yang berfungsi sebagai user interface, yaitu 192.168.2.31. Halaman kendali berisikan tombol-tombol kendali dengan fungsi yang berbeda. Berdasarkan input tombol kendali yang terdapat pada halaman web pengendalian untuk
0.099 0.126 0.376
0.195 0.152
0
0.101 0
0.457
0.050.10 0.150.2 0.250.3 0.350.4 0.45
1 2 3 4 5 6 7 8 9
Persentase
Rules
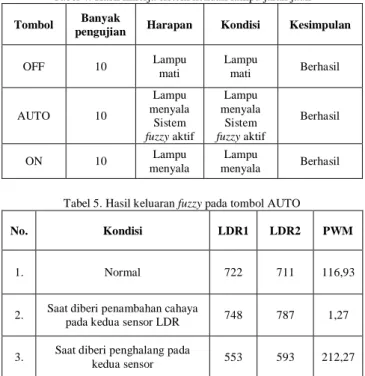
mengendalikan lampu dari jarak jauh, diperoleh hasil kinerja sistem seperti pada Tabel 4.
Sistem dapat diakses melalui sebuah smartphone menggunakan jaringan wireless sejauh sistem terkoneksi dengan jaringan tersebut. Pengujian dilakukan sebanyak 10 kali perulangan masing-masing tombol. Input tombol berhasil bekerja sebagaimana fungsinya yang telah diatur.
Tombol OFF berhasil memadamkan lampu, tombol AUTO berhasil menyalakan lampu serta mengaktifkan sistem fuzzy, dan tombol ON berhasil menyalakan lampu.
Disimpulkan bahwa tombol kendali dapat bekerja dengan baik.
Sistem fuzzy yang telah dibentuk diuji keluarannya pada sistem kendali lampu. Lampu diletakkan diantara kedua sensor LDR. Saat sistem menerima inputan tombol
“AUTO” dari halaman kendali, diperoleh hasil keluaran logika fuzzy seperti pada Tabel 5.
Tabel 5 menampilkan hasil keluaran fuzzy saat sistem menerima input tombol “AUTO”, diperoleh keadaan normal PWM bernilai 116,93 yaitu keadaan ruangan tanpa diberi gangguan. Kemudian dilakukan percobaan dengan memberi gangguan berupa penambahan cahaya pada kedua sensor LDR, sehingga menghasilkan hasil baca sensor LDR meningkat dan diperoleh PWM menurun bernilai 1,27. Namun, ketika kedua sensor LDR diberi penghalang, maka hasil baca sensor LDR menurun dan PWM naik mencapai 212,27.
Pada saat kondisi normal, sistem membaca intensitas cahaya ruangan sebesar 722 dan 711 pada keadaan sama- sama redup. Nilai ini menghasilkan PWM 116,93 yang berada pada range “sedang”. Pada saat kedua sensor LDR diberi cahaya tambahan, sensor membaca intensitas cahaya ruangan 748 dan 787 yaitu dalam keadaan terang.
Sehingga menghasilkan PWM 1,27 yaitu pada range
“rendah”. Pada saat diberi penghalang pada kedua sensor, sistem membaca intensitas cahaya ruangan yaitu 553 dan 593 yaitu dalam keadaan gelap. Dalam hal ini PWM bernilai 212,27 yaitu “tinggi”. Dapat disimpulkan bahwa nilai PWM dipengaruhi oleh sensor LDR1 dan sensor LDR2. Semakin rendah nilai LDR1 atau LDR2 maka keluaran PWM akan meningkat. Sebaliknya, semakin tinggi nilai LDR1 atau LDR2 maka keluaran PWM akan menurun. Hal ini sesuai dengan rules sistem fuzzy yang telah dibuat sebelumnya.
IV. KESIMPULAN
Perangkat sistem kendali yang dirancang pada penelitian ini dapat digunakan untuk mengendalikan lampu dari jarak jauh. Lampu dapat dikendalikan berdasarkan input tombol kendali pada web seperti mematikan, menyalakan dan mengatur tingkat kecerahan lampu secara otomatis selama sistem terhubung dengan jaringan sistem.
Pada tombol AUTO diterapkan kendali logika fuzzy tipe mamdani yang bekerja dengan baik, mampu mengatur tingkat kecerahan lampu secara otomatis berdasarkan hasil baca sensor LDR. Hal ini terlihat dari rata-rata selisih antara pengujian Matlab dan sistem sebesar 0,167%.
Sensitifitas sensor LDR yang digunakan juga mempengaruhi kinerja sistem fuzzy pada lampu otomatis.
Keunikan sistem ini dengan yang sudah ada ialah sistem tidak memerlukan biaya yang besar, bisa dikatakan
relatif murah. Namun, sensitifitas sensor relatif rendah.
Dengan demikian, sistem ini cocok digunakan pada ruangan-ruangan didalam rumah.
Tabel 4. Hasil kinerja sistem kendali lampu jarak jauh
Tombol Banyak
pengujian Harapan Kondisi Kesimpulan
OFF 10 Lampu
mati
Lampu
mati Berhasil
AUTO 10
Lampu menyala
Sistem fuzzy aktif
Lampu menyala
Sistem fuzzy aktif
Berhasil
ON 10 Lampu
menyala
Lampu
menyala Berhasil
Tabel 5. Hasil keluaran fuzzy pada tombol AUTO
No. Kondisi LDR1 LDR2 PWM
1. Normal 722 711 116,93
2. Saat diberi penambahan cahaya
pada kedua sensor LDR 748 787 1,27
3. Saat diberi penghalang pada
kedua sensor 553 593 212,27
REFERENSI
[1] D. Kurniadi and Fitriyani, "Sistem Kendali Jarak Jauh Perangkat Elektronik Rumah Berbasis Cloud Computing," Jurnal Algoritma, vol. 14, no. 2, pp. 205--214, 2017.
[2] S. Luitel, Design and Implementation of a Smart Home System, Metropolia Ammattikorkeakoulu, 2013.
[3] P. Rahmiati, G. FIrdaus and N. Fathorrahman, "Implementasi Sistem Bluetooth menggunakan Android dan Arduino untuk Kendali Peralatan Elektronik," ELKOMIKA: Jurnal Teknik Energi Elektrik, Teknik Telekomunikasi, \& Teknik Elektronika, vol. 2, no.
1, p. 1, 2014.
[4] A. M. H. Pardede, N. Novriyenni and S. Efendi, "Implementasi Pengendalian Lampu Otomatis Berbasis Arduino Menggunakan Metode Fuzzy Logic," TECHSI-Jurnal Teknik Informatika, vol. 9, no. 2, pp. 164--177, 2017.
[5] Ferisandriya, "Pengertian, Jenis Dan Fungsi Wireless Router,"
UNBAJA, 18 November 2015. [Online]. Available:
https://unbaja.ilearning.me/2015/11/18/pengertian-jenis-dan-fungsi- wireless-router/. [Accessed 12 September 2019].
[6] Y. M. V. G. P. Adi, "Monitoring Suhu 4 Channel Jarak Jauh Berbasis Arduino Uno," Tugas akhir. Universitas sanata dharma, 2014.
[7] A. Rismawan, "Konsep Sistem Kendali, SIstem Kendali Terbuka &
Tertutup dan Contoh Aplikasinya," 12 Februai 2015. [Online].
Available:
https://serbatelekomunikasi.wordpress.com/2015/02/12/8/.
[Accessed September 2019].
[8] A. K. Tsauqi, M. H. el, I. Manuel, V. M. Hasan, A. Tsalsabila, F.
Chandra, T. Yuliana, P. Tarigan and I. Irzaman, "Saklar Otomatis Berbasis Light Dependent Resistor (LDR) Pada Mikrokontroler Arduino Uno," PROSIDING SEMINAR NASIONAL FISIKA (E- JOURNAL), vol. 5, pp. SNF2016--CIP, 2016.
[9] A. F. Silvia, E. Haritman and Y. Mulyadi, "Rancang Bangun Akses Kontrol Pintu Gerbang Berbasis Arduino dan Android," Electrans, vol. 13, no. 1, pp. 1--10, 2014.
[10] S. Wibowo, "Penerapan Logika Fuzzy Dalam Penjadwalan Waktu Kuliah," Jurnal Informatika UPGRIS, vol. 1, 2015.