RANCANG BANGUN SOLAR TRACKER DENGAN SENSOR LDR BERBASIS MIKRIKONTROLER ATMEGA 8
TUGAS AKHIR
MARSELLA BR GINTING 152408007
PROGRAM STUDI D-III FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2018
RANCANG BANGUN SOLAR TRACKER DENGAN SENSOR
LDR BERBASIS MIKRIKONTROLER ATMEGA 8
TUGAS AKHIR
Diajukan Untuk Melengkapi Tugas Dan Memenuhi Syarat Memperoleh Ahli Madya
MARSELLA BR GINTING 152408007
PROGRAM STUDI D-III FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2018
LEMBAR PERSETUJUAN
Judul : Rancang Bangun Solar Tracker Dengan Sensor LDR Berbasis Mikrokontrler ATmega 8
Katagori : Laporan Tugas Akhir
Nama : Marsella Ginting
Nim : 152408007
Program Studi : D-III Fisika Departemen : Fisika
Fakultas : Matematika Ilmu Pengetahuan Alam
Mengetahui, Medan, Juli 2018
PERNYATAAN
RANCANG BANGUN SOLAR TRACKER DENGAN SENSOR LDR BERBASIS MIKRIKONTROLER ATMEGA 8
TUGAS AKHIR
Saya mengakui bahwa Tugas Akhir ini adalah hasil karya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 26 Juni 2018
Marsella Br.Ginting NIM. 152408007
RANCANG BANGUN SOLAR TRACKER DENGAN SENSOR LDR BERBASIS MIKRIKONTROLER ATMEGA 8
ABSTRAK
Peningkatan populasi manusia menuntut sumber daya alam untuk memenuhi berbagai kebutuhan. Misalnya: kebutuhan energy listrik yang sangat mempengaruhi perkembangan dan teknologi suatu wilayah. Pembuatan Laporan Tugas Akhir ini bertujuan agar penulis dapat membuat rancang bangun alat pembangkit lsitrik dengan menggunakan solar cell yang dapat digunakan dalam kehidupan sehari-hari.
Telah dilakukan perancangan Solar Tracker menggunakan empat buah sensor LDR untuk mengindera arah gerak matahari. Solar Tracker digunakan untuk menggerakkan sel surya agar mengikuti arah gerak matahari. Rangkaian elektronik terdiri dari rangkaian catudaya, rangkaian mikrokontroler ATMega8, LCD, Rangkaian driver motor servo, dan rangkaian sensor LDR. Rancangan mekanik menggunakan dua sumbu putar dengan motor servo sebagai penggerak agar sel surya dapat mengikuti gerak semu harian matahari (dalam arah timur-barat) dan gerak semu tahunan matahari (dalam arah utara-selatan).
Kata Kunci : Sensor LDR, Motor Servo, Solar Cell, Mikrokontroler ATMega8, LCD, dan Pembagi Tegangan
PENGHARGAAN
Puji dan Syukur penulis panjatkan kepada TYM, dengan dilimpahkan berkat- Nya penyusunan Tugas Akhir ini dapat diselesaikan. Ucapan Terima kasih penulis sampaikan Kepada berbagai pihak yang telah banyak membantu penulis dalam menyelesaikan Laporan Akhir ini yaitu kepada:
1. Bapak Dr. Kerista Sebayang,MS, selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Bapak Drs. Takdir Tamba,M.Eng.Sc selaku Ketua Program Studi D-III Fisika Fakultas MIPA Universitas Sumatera Utara.
3. Ibu Dra. Manis Sembiring,M.Si selaku Pembimbing yang telah membimbing dan mengarahkan Kepada Penulis dalam menyelesaikan Laporan Tugas Akhir.
4. Seluruh Staf Pengajar/Pegawai Program Studi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
5. Ayahanda dan Ibunda tercinta yang telah memberikan bantuan berupa dukungan moral dan material yang sangat membantu dalam menyelesaikan Laporan Tugas Akhir.
6. Kakak-kakak saya tercinta yang telah memberikan motivasi dalam menyelesaikan Laporan Tugas Akhir.
7. Senior kami Faturrahman yang telah memberikan bantuan berupa Ilmu dan Motivasi dalam menyelesaikan Laporan Tugas Akhir.
8. Sahabat Saya Diana Feronika Sihombing, Paulus Purba, Sura Pensika Saragih yang telah memberikan Dorongan Semangat dan Motivasi dalam menyelesaikan Laporan Tugas Akhir.
9. Rekan-rekan Fisika Instrumentasi D-III yang memberikan bantuan penulisan untuk menyelesaikan Laporan.
Akhir kata, semoga Laporan ini dapat bermanfaat bagi rekan-rekan Mahasiswa dan pembaca sekalian demi menambah pengetahuan tentang Laporan Tugas Akhir.
DAFTAR ISI
Halaman
LEMBAR PERSETUJUAN……….. i
PERNYATAAN……….. ii
ABSTRAK... iii
PENGHARGAAN... iv
DAFTAR ISI... v
DAFTAR GAMBAR... viii
DAFTAR TABEL……… x
BAB I PENDAHULUAN………. 1
1.1.Latar Belakang………. 1
1.2.Rumusan Masalah……… 2
1.3.Tujuan Penulisan………. 2
1.4.Batasan Masalah………. 3
1.5.Metode Penulisan……… 3
1.6.Sistematika Penulisan……… 4
BAB II LANDASAN TEORI……….. 5
2.1.Mikrokontroler AVR Atmega 8………... . 5
2.1.1.Kelebihan Sistem dengan Mikrokontroler... .. 5
2.1.2.Mikrokontroler Atmega 8……….. 8
2.1.3. Konfigurasi Pin Atmega 8 ………. 9
2.1.4.Peta Memori Atmega 8……… 13
2.1.5.Timer/Counter 0………..………….. 14
2.1.6.Konfigurasi Serial Atmega 8…….……….. 14
2.1.6.1.Clock Generator………. 15
2.1.6.2.USART Transmitter……….. 15
2.1.6.3.USART Receiver……… 16
2.1.7.Sistem Minimum Atmega 8………... 16
2.2.Motor Servo………..……… 16
2.2.1.Keunggulan Motor Servo………….……… … 17
2.2.2.Kelemahan Motor Servo……….. 17
2.2.3.Aplikasi Motor Servo……… 17
2.2.4.Komponen Penyusun Motor Servo……….. 18
2.2.5.Cara Mengendalikan Motor Servo………. 19
2.3.Driver Motor………. 19
2.3.1. Driver H-Bridge Motor DC……… 20
2.3.2. Driver Relay Motor DC ………. 21
2.4.Solar Tracking……….. 21
2.5. Sel Surya / Solar cell ……….. 22
2.5.1. Prinsip kerja panel surya…... … 23
2.5.2. Struktur panel surya……… 24
2.5.3.Generasi panel surya……….. .... 26
2.5.3.1.Generasi Pertama Sel Surya Berbasis Wafer 26 2.5.3.2.Generasi kedua Thin Film……… 27
2.5.3.3.Generasi ketiga Sel Fotovoltaik……….. 27 2.5.3.4.Generasi keempat Sel Fotovoltaik Komposit 28
BAB III PERANCANGAN DAN PEMBUATAN………. 19
3.1.Diagram Blok Sistem……… 19
3.1.1.Fungsi-Fungsi Diagram Blog………. 30
3.2.Rangkaian Mikrokontroler Atemega8………... 30
3.3.Rancangan Rangkaian LCD……... ……… 31
3.4.Rangkaian LDR………. 32
3.5.Rangkaian Motor Servo ………. 33
3.6.Rangkaian Solar Cell ……….. 35
3.7.Rangkaian Pembagi Tegangan……… 36
3.8.Flowchat Sistem ……….. 37
BAB IV PENGUJIAN DAN HASIL………. 38
4.1.Program pengujian Mikrokontroller ATMega8…... . 38
4.2 Program Pengujian LCD……… 38
4.3.Program motor Servo……….. 39
4.4.Program solar cell……… 40
4.5.Program 4 LDR dan Program Pembagi Tegangan…. 40 BAB V PENUTUP……….………. 44
5.1.Kesimpulan……… 44
5.2.Saran………... 45
DAFTAR PUSATAKA……….. 46
LAMPIRAN 1……… 47
LAMPIRAN 1……… 49
DAFTAR GAMBAR
Halaman
2.1.Mikrokontroler ATmega8………. 8
2.2.Konfigurasi Pin Atmega8……… 9
2.3.Blok Diagram ATmega8..……….. 11
2.4.Status Register ATmega8……… 12
2.5.Peta Memori ATmega8……… 13
2.6.Blok USART ………. 15
2.7.Sistem Minimum ATmega8………. 16
2.8.Bentuk Motor Servo ……… 17
2.9.Contoh motor servo 180o yang sering digunakan untuk kaki robot 18 2.10.Bentuk pulsa kendali motor servo………….. ……… 19
2.11.Rangkaian Driver Motor H-bridge ………..….. 20
2.12.Rangkaian Driver Relay Motor DC...………. 21
2.13.Junction antara semikonduktor………... 23
2.14.Ilustrasi cara kerja sel surya dengan prinsip p-n junction 24
2.15.Struktur Panel Surya.…….……….. 25
2.16.Generasi Pertama Panel Surya berbasis Wafer…………. 26
2.17.Generasi Kedua Panel Surya berbasis Wafer.……… 27
3.1.Diagram Blok Rangkaian …………..……… 29
3.2.Rangkaian sistem minimum Mikrokontroler ATMEGA8… 30 3.3.Rangkaian LCD……….. 31
3.4.Rangkaian LDR……….. 32
3.5.Rangkaian Motor Servo……… 33
3.6.Rangkaian Solar Cell………. 35
3.7.Rangkaian Pembagi Tegangan………. 36
3.8.Flowchart Sistem………. 37
DAFTAR TABEL
Halaman 4.6Data Pengujian Solar Tracker ……… 43
DAFTAR LAMPIRAN
Halaman
Lampiran 1 .……….………… 47
Lampiran 2 ……….. 49
Lampiran 3 ……….. 53
BAB 1 PENDAHULUAN 1.1 Latar Belakang Masalah
Listrik telah menjadi bagian yang tidak terpisahkan dalam kehidupan masyarakat modern. Hampir semua aktivitas manusia, baik di rumah tangga, perkantoran, mau pun industry sangat bergantung pada listrik. Listrik dapat dibangkitkan dengan menggunakan generator listrik. Lebih dari 99% energy listrik yang digunakan sekarang dihasilkan oleh generator listrik dalam bentuk arus bolak-balik yang mudah disalurkan dalam rentang jarak yang jauh.
Pemanfaatan energy surya sebagai sumber energy alternative bagi pemenuhan kebutuhan listrik di Indonesia sangatlah tepat mengingat letak geografis yang berada di daerah tropis dengan panas matahari tersedia sepanjang tahun. Keadaan alam Indonesia yang relative sulit dijangkau oleh jaringan listrik terpusat menyebabkan pilihan terhadap energy surya merupakan suatu keharusan.
Ada dua macam teknologi pemanfaatan energy surya yaitu teknologi energy surya termal dan energy surya fotovoltaik. Energi surya termal di Indonesia pada umumnya digunakan untuk proses pengeringan hasil pertanian dan hasil kelautan, sedangkan energy surya fotovoltaik digunakan untuk memenuhi kebutuhan listrik terutama di daerah terpencil. Teknologi energy surya fotovoltaik (photovoltaic) adalah teknologi pemanfaatan energy surya dengan cara mengonversi energy tersebut menjadi arus listrik dengan menggunakan piranti semi konduktor yang disebut sel surya (solar cell). Alat yang digunakan untuk mengikuti arah gerak matahari dikenal sebagai solar tracker. Arah gerak matahari tersebut dapat diikuti dengan mengindera perubahan arah cahaya yang dipancarkannya. Sensor-sensor cahaya yang lazim digunakan pada beberapa penelitian terdahulu adalah foto diode dan LDR (Light Dependent Resistors).
Dalam kesempatan ini penulis mencoba membuat suatu alat menggunakan Solar Tracker untuk Tugas Akhir dengan beberapa aplikasi diantaranya Mikrokontroler ATMega8 dan sensor LDR. Dimana Solar Tracker tersebut berguna untuk menghitung tegangan sel surya/matahari dengan tegangan yang maksimal dimana. Solar tracker ini bekerja dengan menggunakan empat buah sensor LDR (Light Dependent Resistor) dan dua motor servo. Sistem ini dikendalikan oleh
Arduino Uno yang menjalankan program yang ditanamkan oleh software Arduino IDE (Integrated Development Environment).
Hasil pengujian di bawah sinar matahari menunjukkan perbandingan tegangan rangkaian terbuka (Voc) dan arus hubung singkat (Isc) dari sel surya yang terpasang pada solar tracker terhadap sel surya yang posisinya tetap. Sel surya yang terpasang pada sun tracker menghasilkan tegangan rangkaian terbuka rata – rata 5,97% lebih besar dari sel surya yang posisinya tetap dan nilai tertinggi perbandingannya adalah 8,73% lebih besar. Arus hubung singkat yang dihasilkan sel surya pada solar tracker rata-rata 25,36% lebih besar dari arus sel surya pada posisi tetap dan nilai perbandingan tertinggi yang diperoleh dari pengujian adalah 90,09%
lebih besar. Untuk itulah penulis mencoba untuk membuat suatu alat dan penulisan Tugas Akhir dengan judul “Rancang Bangun Solar Tracker dengan Sensor LDR Berbasis Mikrokontroler Atmega 8”.
1.2 Rumusan Masalah
Adapun permasalahan yang dibahas dalam Tugas Akhir ini adalah:
1. Bagaimana cara menggerakkan motor servo sesuai gerak matahari?
2. Bagaimana cara merancang solar tracker untuk mendapatkan efesiensi yang besar?
1.3 Tujuan Penulisan
Adanya Tujuan dari penulisan Tugas Akhir ini sebagai berikut:
1. Dapat mengetahui bagaimana cara kerja Solar Tracker untuk menghasilkan tegangan yang maksimum
2. Agar lebih mengerti tentang fungsi sensor LDR dalam alat ini
3. Agar lebih mengerti tentang fungsi Mikrokontroler ATMega8 dalam alat ini 4. Menerapakan dan mengaplikasikan ilmu tentang mikrokontroler yang telah
dipelajari selama menempuh pendidikan.
1.4 Batasan Masalah
Dalam perencanaan penulisan ini terdapat beberapa batasan masalah sebaai berikut:
1. Rangkaian Mikrokontroler yang digunakan adalah Mikrokontroler ATMega8 2. Solar tracking system ini nantinya dikontrol oleh mikrokontroler arduino
Uno, Arduino Uno adalah pengendali mikro single-board yang bersifat open- source, diturunkan dari Wiring plat form, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang.
3. Motor yang digunakan adalah Motor servo yang berguna sebagai penggerak tanpa melakukan tinjauan mengenai ukuran atau spesifikasi motor servo yang sesuai untuk beban tertentu.
4. Sensor yang dipakaiadalah sensor LDR (Light Dependent Resistor) adalah jenis resistor yang nilai resistan sinyal tergantung pada intensitas cahaya yang diterimanya.
5. Aplikasi computer yang digunakan adalah aplikasi Arduiono
6. IC jam yang digunakan adalah IC jam RTC yang berfungsi sebagai sumber data waktu baik berupa data jam, hari, bulan maupun tahun.
1.5 Metodologi Penulisan
Langkah yang akan ditempuh dalam menyelesaikan Tugas Akhir ini diantaranya adalah:
a. Study Literatur
Pencarian dan pengumpulan literatur-literatur dan kajian-kajian yang berkaitan dengan masalah-masalah yang ada dalam Tugas Akhir baik berupa artikel, buku referensi, internet dan sumber-sumber lain.
b. Analisa Masalah
Menganalisa semua permasalahan yang ada berdasarkan sumber-sumber yang ada dan berdasarkan pengamatan terhadap masalah tersebut.
c. Perancangan dan realisasi alat
Membuat perancangan alat berdasarkan parameter yang diinginkan kemudian merealisasikan rancangan tersebut.
d. Simulasi Sistem
Setelah tahap perancangan berdasarkan standar yang ada, tahap selanjutnya adalah Melakukan simulasi system untuk melihat kinerja system tersebut.
1.6 Sistematika Penulisan
Untuk mempermudah pembahasan dan penulisan laporan ini, penulis membuat susunan bab-bab yang membentuk laporan ini dalam sistematika penulisan laporan dengan urutan sebagai berikut:
BAB 1 PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, rumusan masalah, tujuan penulisan, batasan masalah, serta sistematika penulisan.
BAB 2 LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian dan bahasa pemrograman yang digunakan, serta karakteristik dari komponen-komponen pendukung.
BAB 3 PERANCANGAN DAN PEMBUATAN
Bab ini berisikan tentang proses perancangan dan pembuatan alat. Mulai dari perancangan dan pembuatan system secara hardware atau software.
BAB 4 HASIL DAN PEMBAHASAN
Dalam bab ini akan dibahas hasil analisa dari rangkaian dan system kerjaalat, penjelasan mengenai rangkaian-rangkaian yang digunakan, penjelasan mengenai program yang diisikan miktokontroler ATMega8.
BAB 5 PENUTUP
Dalam bab ini menjelaskan kesimpulan dan saran dari alatatau pun data yang dihasilkan dari alat. Bab ini juga merupakan akhir dari penulisan laporan proyek ini.
BAB 2
LANDASAN TEORI
2.1 Mikrokontroler AVR Atmega8
Mikrokontroler adalah sebuah chip yang berfungsi sebagai pengontrol rangkaian elektronik dan umunya dapat menyimpan program didalamnya.
Mikrokontroler umumnya terdiri dari CPU (Central Processing Unit), memori, I/O tertentu dan unit pendukung seperti Analog-to-Digital Converter (ADC) yang sudah terintegrasi di dalamnya.
Kelebihan utama dari mikrokontroler ialah tersedianya RAM dan peralatan I/O pendukung sehingga ukuran board mikrokontroler menjadi sangat ringkas.
Mikrokontroler MCS51 ialah mikrokomputer CMOS 8 bit dengan 4 KB Flash PEROM (Programmable and Erasable Only Memory) yang dapat dihapus dan ditulisi sebanyak 1000 kali. Mikrokontroler ini diproduksi dengan menggunakan teknologi high density non-volatile memory. Flash PEROM on-chip tersebut memungkinkan memori program untuk diprogram ulang dalam sistem (in-system programming) atau dengan menggunakan programmer non-volatile memory konvensional. Kombinasi CPU 8 bit serba guna dan Flash PEROM, menjadikan mikrokontroler MCS51 menjadi microcomputer handal yang fleksibel.
2.1.1 Kelebihan Sistem Dengan Mikrokontroler
Penggerak pada mikrokontoler menggunakan bahasa pemograman assembly dengan berpatokan pada kaidah digital dasar sehingga pengoperasian sistem menjadi sangat mudah dikerjakan sesuai dengan logika sistem (bahasa assembly ini mudah dimengerti karena menggunakan bahasa assembly aplikasi dimana parameter input dan output langsung bisa diakses tanpa menggunakan banyak perintah). Desain bahasa assembly ini tidak menggunakan begitu banyak syarat penulisan bahasa pemrograman seperti huruf besar dan huruf kecil untuk bahasa assembly tetap diwajarkan.
Mikrokontroler tersusun dalam satu chip dimana prosesor, memori, dan I/O terintegrasi menjadi satu kesatuan kontrol sistem sehingga mikrokontroler dapat dikatakan sebagai komputer mini yang dapat bekerja secara inovatif sesuai dengan kebutuhan sistem.
Sistem running bersifat berdiri sendiri tanpa tergantung dengan komputer sedangkan parameter komputer hanya digunakan untuk download perintah instruksi atau program. Langkah-langkah untuk download komputer dengan mikrokontroler sangat mudah digunakan karena tidak menggunakan banyak perintah.
Pada mikrokontroler tersedia fasilitas tambahan untuk pengembangan memori dan I/O yang disesuaikan dengan kebutuhan sistem.
Harga untuk memperoleh alat ini lebih murah dan mudah didapat.
Jenis-Jenis Mikrokontroler secara umum mikrokontroler terbagi menjadi 3 keluarga besar yang ada di pasaran. Setiap keluarga memepunyai cirri khas dan karekteriktik sendiri sendiri, berikut pembagian keluarga dalam mikrokontroler:
1. Keluarga MCS51
Mikrokonktroler ini termasuk dalam keluarga mikrokonktroler CISC.Sebagian besar instruksinya dieksekusi dalam 12 siklus clock. Mikrokontroler ini berdasarkan arsitektur Harvard dan meskipun awalnya dirancang untuk aplikasi mikrokontroler chip tunggal, sebuah mode perluasan telah mengizinkan sebuah ROM luar 64KB dan RAM luar 64KB diberikan alamat dengan cara jalur pemilihan chip yang terpisah untuk akses program dan memori data.Salah satu kemampuan dari mikrokontroler 8051 adalah pemasukan sebuah mesin pemroses boolean yang mengijikan operasi logika boolean tingkatan-bit dapat dilakukan secara langsung dan secara efisien dalam register internal dan RAM.
Karena itulah MCS51 digunakan dalam rancangan awal PLC (programmable Logic Control).
2. AVR
Mikrokonktroler Alv and Vegard’s Risc processor atau sering disingkat AVR merupakan mikrokonktroler RISC 8 bit. Karena RISC inilah sebagian besar kode instruksinya dikemas dalam satu siklus clock.AVR adalah jenis mikrokontroler yang paling sering dipakai dalam bidang elektronika dan instrumentasi.Secara umum, AVR dapat dikelompokkan dalam 4 kelas.Pada dasarnya yang membedakan masing- masing kelas adalah memori, peripheral dan fungsinya.Keempat kelas tersebut adalah keluarga ATTiny, keluarga AT90Sxx, keluarga ATMega dan AT86RFxx.
3. PIC
PIC ialah keluarga mikrokontroler tipe RISC buatan Microchip Technology.
Bersumber dari PIC1650 yang dibuat oleh Divisi Mikroelektronika General Instruments. Teknologi Microchip tidak menggukana PIC sebagai akronim,melaikan nama brandnya ialahPICmicro. Hal ini karena PIC singkatan dari Peripheral Interface Controller, tetapi General Instruments mempunyai akronim PIC1650 sebagai Programmabel Intelligent Computer.PIC pada awalnya dibuat menggunakan teknologi General Instruments 16 bit CPU yaitu CP1600. * bit PIC dibuat pertama kali 1975 untuk meningkatkan performa sistem peningkatan pada I/). Saat ini PIC telah dilengkapi dengan EPROM dan komunikasi serial, UAT, kernel kontrol motor dll serta memori program dari 512 word hingga 32 word. 1 Word disini sama dengan 1 instruki bahasa assembly yang bervariasi dari 12 hingga 16 bit, tergantung dari tipe PIC micro tersebut. Silahkan kunjungi www.microchip.com untuk melihat berbagai produk chip tersebut.Pada awalnya, PIC merupakan kependekan dari Programmable Interface Controller. Tetapi pada perkembangannya berubah menjadi Programmable Intelligent Computer.PIC termasuk keluarga mikrokonktroler berarsitektur Harvard yang dibuat oleh Microchip Technology. Awalnya dikembangkan oleh Divisi Mikroelektronik General Instruments dengan nama PIC1640. Sekarang Microhip telah mengumumkan pembuatan PIC-nya yang keenam.PIC cukup popular digunakan oleh para developer dan para penghobi ngoprek karena biayanya yang rendah, ketersediaan dan penggunaan yang luas, database aplikasi yang besar, serta pemrograman (dan pemrograman ulang) melalui hubungan port serial yang terdapat pada komputer.
Yang digukanakan adalah mikrokontroler AVR ATMega 8.AVR merupakan salah satu jenis mikrokontroler yang di dalamnyaterdapat berbagai macam fungsi.Perbedaannya pada mikro yang pada umumnya digunakan seperti MCS51 adalah pada AVR tidak perlu menggunakan oscillatoreksternal karena di dalamnya sudah terdapat internal oscillator. Selain itu kelebihan dari AVR adalah memiliki Power-On Reset, yaitu tidak perlu ada tombol reset dari luar karena cukup hanya dengan mematikan supply, maka secara otomatis AVR akan melakukan reset. Untuk beberapa jenis AVR terdapat beberapa fungsi khusus seperti ADC, EEPROM sekitar 128 byte sampai dengan 512 byte.
AVR ATmega8 adalah mikrokontroler CMOS 8-bit berarsitektur AVR RISC yang memiliki 8K byte in-System Programmable Flash. Mikrokontroler dengan konsumsi daya rendah ini mampu mengeksekusi instruksi dengan kecepatan maksimum 16MIPS pada frekuensi 16MHz. Jika dibandingkan dengan ATmega8L perbedaannya hanya terletak pada besarnya tegangan yang diperlukan untuk bekerja.
Untuk ATmega8 tipe L, mikrokontroler ini dapat bekerja dengan tegangan antara 2,7 - 5,5 V sedangkan untuk ATmega8 hanya dapat bekerja pada
tegangan antara 4,5 – 5,5 V.
2.1.2 Mikrokontroler ATmega8
Gambar 2.1. Mikrokontroler ATmega8
Mikrokontroler ini diproduksi oleh atmel dari seri AVR.Untuk seri AVR ini banyak jenisnya, yaitu ATmega8, ATmega8535, Mega8515, Mega16, dan lain-lain.
Beberapa fitur dari ATmega8 adalah sebagai berikut : 1. 8 Kbyte Flash Program
2. 12 Kbyte EEPROM 3. 1 Kbyte SRAM
4. 2 timer 8 bit dan 1 timer 16 bit 5. Analog to digital converter 6. USART
7. Analog comparator
8. Two wire interface (I2C)
2.1.3 Konfigurasi Pin Atmega8
Gambar 2.2. Konfigurasi Pin Atmega8
ATmega8 memiliki 28 Pin, yang masing-masing pin nya memiliki fungsiyang berbeda-beda baik sebagai port maupun fungsi yang lainnya. Berikut akandijelaskan fungsi dari masing-masing kaki ATmega8.
VCC
Merupakan supply tegangan digital.
GND
Merupakan ground untuk semua komponen yang membutuhkan grounding.
Port B (PB7...PB0)
Didalam Port B terdapat XTAL1, XTAL2, TOSC1, TOSC2. Jumlah Port B adalah 8 buah pin, mulai dari pin B.0 sampai dengan B.7. Tiap pin dapat digunakan sebagai input maupun output. Port B merupakan sebuah 8-bit bi-directional I/O dengan internal pull-up resistor. Sebagai input, pin-pinyang terdapat pada port B yang secara eksternal diturunkan, maka akan mengeluarkan arus jika pull-up resistor diaktifkan. Khusus PB6 dapat digunakan sebagai input Kristal (inverting oscillator amplifier) dan input kerangkaian clock internal, bergantung pada pengaturan Fuse bit yang digunakan untuk memilih sumber clock. Sedangkan untuk PB7 dapat digunakan sebagai output Kristal (output oscillator amplifier) bergantung pada pengaturan Fuse bit yang digunakan untuk memilih sumber clock. Jikasumber
clock yang dipilih dari oscillator internal, PB7 dan PB6 dapatdigunakan sebagai I/O atau jika menggunakan Asyncronous Timer/Counter2 maka PB6 dan PB7 (TOSC2 dan TOSC1) digunakan untuk saluran inputtimer.
Port C (PC5…PC0)
Port C merupakan sebuah 7-bit bi-directional I/O port yang di dalam masingmasing pin terdapat pull-up resistor. Jumlah pin nya hanya 7 buah mulai dari pin C.0 sampai dengan pin C.6. Sebagai keluaran/output port C memiliki karakteristik yang sama dalam hal menyerap arus (sink) ataupun mengeluarkan arus (source).
RESET/PC6
Jika RSTDISBL Fuse diprogram, maka PC6 akan berfungsi sebagai pin I/O.
Pin ini memiliki karakteristik yang berbeda dengan pin-pin yang terdapat pada port C lainnya. Namun jika RSTDISBL Fuse tidak diprogram, maka pin ini akan berfungsi sebagai input reset. Dan jika level tegangan yang masuk ke pin ini rendah dan pulsa yang ada lebih pendek dari pulsa Pin ini berfungsi sebagai supply tegangan untuk ADC. Untuk pin ini harusdihubungkan secara terpisah dengan VCC karena pin ini digunakan untuk analog saja. Bahkan jika ADC pada AVR tidak digunakan tetap saja disarankan untuk menghubungkannya secara terpisah dengan VCC. Jika ADC digunakan, maka AVcc harus dihubungkan ke VCC melalui low passfilter.
AREF
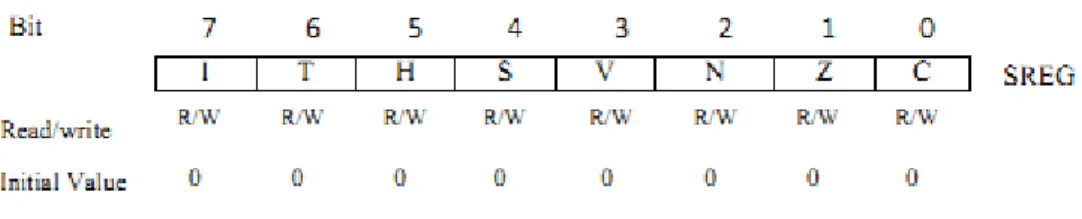
Merupakan pin referensi jika menggunakan ADC. AVR status register mengandung beberapa informasi mengenai hasil dari kebanyakan hasil eksekusi instruksi aritmatik. Informasi ini digunakan untuk altering arus program sebagai kegunaan untuk meningkatkan performa pengoperasian.
Dalam hal ini untuk beberapa kasus dapat membuang penggunaan kebutuhan instruksi perbandingan yang telah didedikasikan serta dapat menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih sederhana dan singkat.
Register ini tidak secara otomatis tersimpan ketika memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah setelah kembali dari interupsi. Namun hal tersebut harus dilakukan melalui software. Berikut adalah gambar status register.
Gambar 2.3. Blok Diagram ATmega8
Pada AVR status register mengandung beberapa informasi mengenai hasil dari kebanyakan hasil eksekusi instruksi aritmatik. Informasi ini digunakan untuk altering arus program sebagai kegunaan untuk meningkatkan performa pengoperasian. Register ini di-update setelah operasi ALU (Arithmetic Logic Unit) hal tersebut seperti yang tertulis dalam datasheet khususnya pada bagian Instruction Set Reference. Dalam hal ini untuk beberapa kasus dapat membuang penggunaan kebutuhan instruksi perbandingan yang telah didedikasikan serta dapat menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih sederhana dan singkat.
Register ini tidak secara otomatis tersimpan ketika memasuki sebuah rutin interupsi
dan juga ketika menjalankan sebuah perintah setelah kembali dari interupsi. Namun hal tersebut harus dilakukan melalui software. Berikut adalah gambar status register.
Gambar 2.4. Status Register ATmega8 1. Bit 7(I)
Merupakan bit Global Interrupt Enable. Bit ini harus di-set agar semua perintah interupsi dapat dijalankan. Untuk perintah interupsi individual akan di jelaskan pada bagian yang lain. Jika bit ini di-reset, maka semua perintah interupsi baik yang individual maupun yang secara umum akan di abaikan. Bit ini akan dibersihkan atau cleared oleh hardware setelah sebuah interup dijalankan dan akan di-set kembali oleh perintah RETI. Bit ini juga dapat diset dan di-reset melalui aplikasi dan intruksi SEI dan CLL.
2. Bit 6(T)
Merupakan bit Copy Storage. Instruksi bit Copy Instructions BLD (Bit Load) and BST (Bit Store) menggunakan bit ini sebagai asal atau tujuan untuk bit yang telah dioperasikan. Sebuah bit dari sebuah register dalam Register File dapat disalin ke dalam bit ini dengan menggunakan instruksi BST, dan sebuah bit di dalam bit ini dapat disalin ke dalam bit di dalam register pada Register File dengan menggunakan perintah BLD.
3. Bit 5(H)
Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatika BCD.
4. Bit 4(S)
Merupakan Sign bit. Bit ini selalu merupakan sebuah ekslusif di antara Negative Flag (N) dan two’s Complement Overflow Flag (V).
5. Bit 3(V)
Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi aritmatika dua komplemen.
6. Bit 2(N)
Merupakan bit Negative Flag. Bit ini mengindikasikan sebuah hasil negative di dalam sebuah fungsi logika atai aritmatika.
7. Bit 1(Z)
Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah jasil nol “0” dalam sebuah fungsi aritmatika atau logika.
8. Bit 0(C)
Merupakan bit Carry Flag. Bit ini mengindikasikan sebuah Carry atau sisa dalam sebuah aritmatika atau logika.
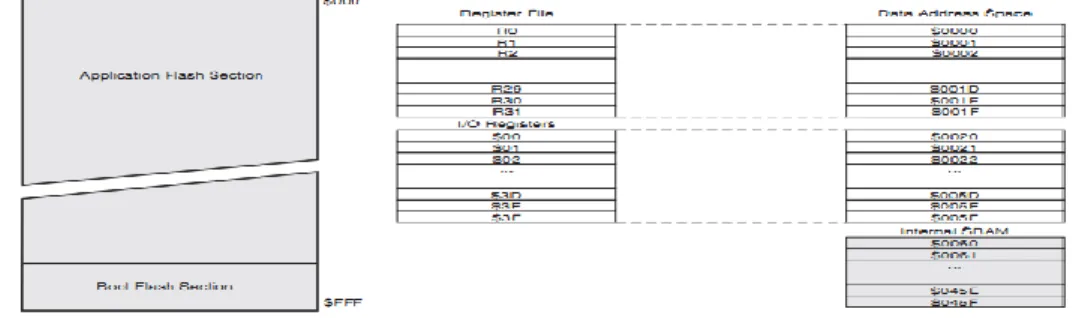
2.1.4 Peta Memori ATmega8
Gambar 2.5. Peta Memori ATmega8 Memori atmega terbagi menjadi tiga yaitu :
1. Memori Flash
Memori flash adalah memori ROM tempat kode-kode program berada. Kata flash menunjukan jenis ROM yng dapat ditulis dan dihapus secara elektrik. Memori flash terbagi menjadi dua bagian yaitu bagian aplikasi dan bagian boot. Bagian aplikasi adalah bagian kode-kode program apikasi berada.Bagian boot adalah bagian yang digunakan khusus untuk booting awal yang dapat eprogram untuk menulis bagian aplikasi tanpa melalui programmer/downloader, misalnya melalui USART.
2. Memori Data
Memori data adalah memori RAM yang digunakan untuk keperluan program.
Memori data terbagi menjadi empat bagian yaitu :
32 GPR (General Purphose Register) adalah register khusus yang bertugas untuk membantu eksekusi program oleh ALU (Arithmatich Logic Unit), dalam instruksi assembler setiap instruksi harus melibatkan GPR. Dalam bahasa C biasanya digunakan untuk variabel global atau nilai balik fungsi dan nilai-nilai yang dapat memperingan kerja ALU.Dalam istilah processor komputer sahari-hari GPR dikenal sebagai “chace memory”.
I/O register dan Aditional I/O register adalah register yang difungsikan khusus untuk mengendalikan berbagai pheripheral dalam mikrokontroler seperti pin port, timer/counter, usart dan lain-lain. Register ini dalam keluarga mikrokontrol MCS51 dikenal sebagi SFR(Special Function Register).
3. EEPROM
EEPROM adalah memori data yang dapat mengendap ketika chip mati (off), digunakan untuk keperluan penyimpanan data yang tahan terhadap gangguan catu daya.
2.1.5 Timer/Counter 0
Timer/counter 0 adalah sebuah timer/counter yang dapat mencacah sumber pulsa/clock baik dari dalam chip (timer) ataupun dari luar chip (counter) dengan kapasitas 8-bit atau 256 cacahan. Timer/counter dapat digunakan untuk :
1. Timer/counter biasa
2. Clear Timer on Compare Match (selain Atmega 8) 3. Generator frekuensi (selain Atmega 8)
4. Counter pulsa eksternal
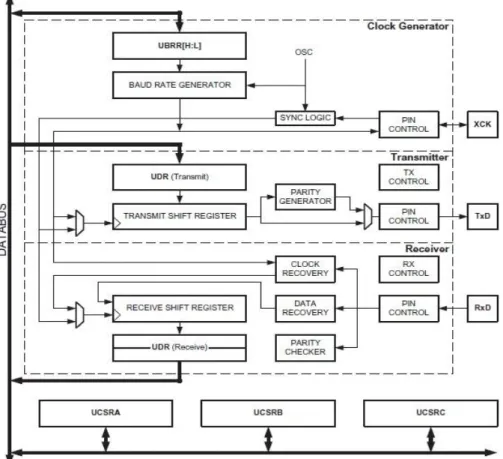
2.1.6 Komunikasi Serial Pada ATmega8
Mikrokontroler AVR Atmega 8 memiliki Port USART pada Pin 2 dan Pin 3 untuk melakukan komunikasi data antara mikrokontroler dengan mikrokontroler ataupun mikrokontroler dengan komputer. USART dapat difungsikan sebagai transmisi data sinkron, dan asinkron. Sinkron berarti clock yang digunakan antara transmiter dan receiver satu sumber clock. Sedangkan asinkron berarti transmiter dan receiver mempunyai sumber clock sendiri-sendiri. USART terdiri dalam tiga blok yaitu clock generator, transmiter, dan receiver.
Gambar 2.6. Blok USART
2.1.6.1 Clock Generator
Clock generator berhubungan dengan kecepatan transfer data (baud rate), register yang bertugas menentukan baud rate adalah register pasangan.
2.1.6.2. USART Transmitter
Usart transmiter berhubungan dengan data pada Pin TX. Perangkat yang sering digunakan seperti register UDR sebagi tempat penampungan data yang akan ditransmisikan. Flag TXC sebagai akibat dari data yang ditransmisikan telah sukses (complete), dan flag UDRE sebagai indikator jika UDR kosong dan siap untuk diisi data yang akan ditransmisikan lagi.
2.1.6.3. USART Receiver
Usart receiver berhubungan dengan penerimaan data dari Pin RX. Perangkat yang sering digunakan seperti register UDR sebagai tempat penampung data yang telah diterima, dan flag RXC sebagi indikator bahwa data telah sukses (complete) diterima.
2.1.7. Sistem Minimum ATmega8
Rangkaian Sistem Minimum berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Komponen utama dari rangkaian sistem minimum adalah Mikrokontroler ATMega8. Pada Mikrokontroler semua program didownload, sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki. Sistem minimum (sismin) mikrokontroler adalah rangkaian elektronik minimum yang diperlukan untuk beroperasinya IC mikrokontroler. Sistem minimum kemudian bisa dihubungkan dengan rangkaian lampu led berjalan, motor dc, dan lain-lain untuk menjalankan fungsi tertentu
Gambar 2.7.Sistem Minimum ATmega8
2.2 .Motor servo
Motor Servo adalah sebuah motor DC dengan sistem umpan balik tertutup di mana posisi rotor-nya akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor DC, serangkaian gear, potensiometer, dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan
batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor servo.
Gambar 2.8. Bentuk Motor Servo
2.2.1.Keunggulan Motor Servo
Keunggulan dari penggunaan motor servo adalah :
Tidak bergetar dan tidak ber resonansi saat beroperasi.
Daya yang dihasilkan sebanding dengan ukuran dan berat motor.
Penggunaan arus listik sebanding dengan beban yang diberikan.
Resolusi dan akurasi dapat diubah dengan hanya mengganti encoder yang dipakai.
Tidak berisik saat beroperasi dengan kecepatan tinggi.
2.2.2.Kelemahan Motor Servo
Keunggulan dari penggunaan motor servo adalah :
Tidak bergetar dan tidak ber-resonansi saat beroperasi.
Daya yang dihasilkan sebanding dengan ukuran dan berat motor.
Penggunaan arus listik sebanding dengan beban yang diberikan.
Resolusi dan akurasi dapat diubah dengan hanya mengganti encoder yang dipakai.
Tidak berisik saat beroperasi dengan kecepatan tinggi.
2.2.3.Aplikasi Motor Servo
Motor servo dapat dimanfaatkan pada pembuatan robot, salah satunya sebagai penggerak kaki robot. Motor servo dipilih sebagai penggerak pada kaki robot karena motor servo memiliki tenaga atau torsi yang besar, sehingga dapat
menggerakan kaki robot dengan beban yang cukup berat. Pada umumnya motor servo yang digunakan sebagai pengerak pada robot adalah motor servo 180o.
Gambar 2.9.Contoh motor servo 180o yang sering digunakan untuk kaki robot
2.2.4.Komponen Penyusun Motor Servo
Motor servo pada dasarnya dibuat menggunakan motor DC yang dilengkapi dengan controler dan sensor posisi sehingga dapat memiliki gerakan 0o, 90o, 180o atau 360o. Berikut adalah komponen internal sebuah motor servo 180o.
Tiap komponen pada motor servo diatas masing-masing memiliki fungsi sebagai controler, driver, sensor, girbox dan aktuator. Pada gambar diatas terlihat beberapa bagian komponen motor servo. Motor pada sebuah motor servo adalah motor DC yang dikendalikan oleh bagian controler, kemudian komponen
yang berfungsi sebagai sensor adalah potensiometer yang terhubung pada sistem girbox pada motor servo.
2.2.5.Cara Mengendalikan Motor Servo
Untuk menjalankan atau mengendalikan motor servo berbeda dengan motor DC. Karena untuk mengedalikan motor servo perlu diberikan sumber tegangan dan sinyal kontrol. Besarnya sumber tegangan tergantyung dari spesifikasi motor servo yang digunakan. Sedangkan untuk mengendalikan putaran motor servo dilakukan dengan mengirimkan pulsa kontrol dengan frekuensi 5o Hz dengan periode 20ms dan duty cycle yang berbeda. Dimana untuk menggerakan motor servo sebesar 90o diperlukan pulsa dengan ton duty cycle pulsa posistif 1,5ms dan unjtuk bergerak sebesar 180o diperlukan lebar pulsa 2ms. Berikut bentuk pulsa kontrol motor servo dimaksud.
Gambar 2.10.Bentuk pulsa kendali motor servo 2.3.Driver Motor
Driver motor ini berguna untuk menggerakkan dan mengontrol motor DC dengan memberikan sinyal masukan. Ada beberapa macam driver motor DC yang biasa kita pakai seperti menggunakan relay yang diaktifkan dengan transistor sebagai saklar. Dengan berkembangnya dunia IC, sekarang sudah ada H-Bridge yang dikemas dalam satu IC dimana memudahkan kita dalam pelaksanaan hardware dan kendalinya apalagi jika menggunakan mikrokontroler. Dalam pemakaian jenis driver yang akan digunakan baik rangkaian driver motor dengan rangkaian transistor untuk membuat H-brigde atau menggunakan IC yang didalamnya mewakili driver H-bridge disesuaikan dengan kebutuhan dari motor yang dipakai. Dalam alat ini menggunakan dua jenis driver untuk menggerakkan motor DC yaitu driver motor H-Bridge dan driver relay.
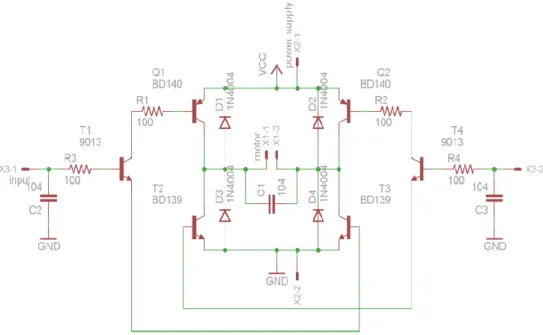
2.3.1 Driver H-Bridge Motor DC
Pada driver motor H-Bridge ini terdapat komponen transistor dan dioda.
Transistor pada rangkaian driver motor DC H-Bridge berfungsi sebagai saklar elektronik untuk mengalirkan arus ke motor DC secara bridge. Daya maksimum pengendalian motor DC dengan metode bridge ini ditentukan oleh kapasitas maksimum transistor mengalirkan arus listrik.
Dioda yang dipasang parallel secara reverse pada kolektro – emitor transistor berfungsi sebagai clamper dioda. Clamper dioda berfungsi untuk melindungi transistor dari lonjakan tegangan balik induksi dari motor DC. Pada rangkaian H- Bridge terdapat dua input dari mikrokontroler yang akan menentukan arah putaran motor. Kedua jalur input tersebut dapat diberikan sinyal input berupa logika HIGH dan LOW berdasarkan sinyal yang dikirim oleh mikrokontroler.
Untuk mengendalikan motor DC dengan rangkaian dasar H-Bridge ini kedua line input tersebut tidak boleh berlogika sama. Dengan kombinasi logika input HIGH dan LOW pada kedua line input rangkaian H-Bridge ini kita dapat mengendalikan motor DC secara searah jarum jam atau clock wise (CW) dan berlawanan arah jarum jam atau counter clock wise (CCW). Untuk lebih jelas dapat dilihat skema rangkaian dasar kontrol motor DC H-Bridge pada gambar 2.8 di bawah ini. Rangkaian driver H-Bridge ini digunakan untuk menggerakkan motor DC pada selang pengisian yang dapat membuat gerakkan turun dan naik.
Gambar 2.11. Rangkaian Driver Motor H-bridge
2.3.2 Driver Relay Motor DC
Pada rangkaian driver relay motor DC alat terdapat konponen IC ULN2003 dan juga relay.
IC ULN2003 berfungsi sebagai penguat daya (arus/tegangan) sehingga dapat menggerakkan relay karena sinyal yang diterima dari mikrokontoler tidak dapat mencukupi.
Relay berfungsi sebagai switching elektronik yng akan menggerakkan motor DC (Motor Power Window). Gambar rangkaian dari rangkaian driver relay dapat dilihat pada gambar.
Gambar 2.12. Rangkaian Driver Relay Motor DC
2.4 Solar Tracking
Ialah suatu kegiatan untuk mengikuti jejak suatu objek adapun jenis Solar tracker yaitu: 1. Polar Tracker Polar tracker merupakan Metode yang secara ilmiah dikenal sebagai metode standar pemasangan struktur dukungan teleskop . sumbu tunggal miring sejajar dengan bintang kutub . Oleh karena itu disebut selaras sumbu tracker tunggal polar ( Pasat ) . Dalam pelaksanaannya tertentu dari tracker sumbu tunggal miring , sudut kemiringan sama dengan situs lintang . Hal ini sejalan sumbu tracker rotasi dengan sumbu bumi rotasi. Pelacak tersebut juga dapat disebut sebagai "tracker sumbu tunggal", karena hanya satu me 14 Horisontal Axis tunggal dapat dibagi antara pelacak untuk menurunkan biaya instalasi. Alat ini kurang efektif di lintang yang lebih tinggi.
Keuntungan utama adalah kekokohan yang melekat pada struktur pendukung dan kesederhanaan mekanisme. Karena panel horisontal, mereka dapat kompak ditempatkan pada tabung poros tanpa bahaya diri-bayangan dan juga perawatan yang mudah. Untuk mekanisme aktif, kendali tunggal dan motor dapat digunakan untuk menjalankan beberapa baris dari panel. (wikipedia, 2016) 3. Vertical Axis Sumbu rotasi untuk vertical axle tracker dibuat tegak lurus dengan tanah. Pelacak ini bergerak dari Timur ke Barat selama sehari. Pelacak tersebut lebih efektif di lintang tinggi daripada pelacak sumbu horizontal.Pelacak tersebut disesuaikan dengan sudut tetap atau (musimnya) cocok untuk garis lintang tinggi, di mana matahari tidak terlalu tinggi, tetapi yang menyebabkan hari yang panjang di musim panas, dengan perjalanan matahari melalui garis bujur bumi.
Metode ini telah digunakan dalam pembangunan rumah silinder di Austria (lintang di atas 45 derajat utara) yang berputar secara keseluruhan untuk melacak matahari, dengan panel vertikal dipasang di salah satu sisi bangunan. Vertikal Axis Pelacak tunggal biasanya memiliki modul yang berorientasi pada sudut sehubungan dengan sumbu rotasi. Sebagai trek modul, menyapu kerucut yang rotationally setangkup sekitar sumbu rotasi.
2.5 Sel Surya / Solar cell
Sel surya adalah kumpulan sel fotovoltaik yang dapat mengkonversi sinar matahari menjadi listrik. Ketika memproduksi panel surya, produsen harus memastikan bahwa sel-sel surya saling terhubung secara elektrik antara satu dengan yang lain pada sistem tersebut. Sel surya juga perlu dilindungi dari kelembaban dan kerusakan mekanis karena hal ini dapat merusak efisiensi panel surya secara signifikan, dan menurunkan masa pakai dari yang diharapkan (Zahaedi.A.1998).
Sel surya biasanya memiliki umur 20 tahun yang biasanya dalam jangka waktu tersebut pemilik panel surya tidak akan mengalami penurunan efisiensi yang signifikan. Namun, meskipun dengan kemajuan teknologi mutahir, sebagian besar panel surya komersial saat ini hanya mencapai efisiensi 15% dan hal ini tentunya merupakan salah satu alasan utama mengapa industri energi surya masih tidak dapat bersaing dengan bahan bakar fosil. Panel surya komersial sangat jarang yang melampaui efisiensi 20%.
Panel surya sangat mudah dalam hal pemeliharaan karena tidak ada bagian yang bergerak. Satu-satunya hal yang harus dikhawatirkan adalah memastikan untuk menyingkirkan segala hal yang dapat menghalangi sinar matahari ke panel surya tersebut.
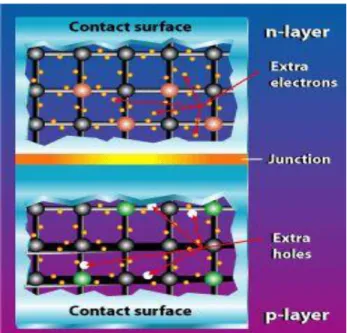
2.5.1 Prinsip kerja panel surya
Sel surya konvensional bekerja menggunakan prinsip p-n junction, yaitu junction antara semikonduktor tipe-p dan tipe-n. Semikonduktor ini terdiri 16 dari ikatan-ikatan atom yang dimana terdapat elektron sebagai penyusun dasar.
Semikonduktor tipe-n mempunyai kelebihan elektron (muatan negatif) sedangkan semikonduktor tipe-p mempunyai kelebihan hole (muatan positif) dalam struktur atomnya. Kondisi kelebihan elektron dan hole tersebut bisa terjadi dengan mendoping material dengan atom dopant. Sebagai contoh untuk mendapatkan material silikon tipe-p, silikon didoping oleh atom boron, sedangkan untuk mendapatkan material silikon tipe-n, silikon didoping oleh atom fosfor. Ilustrasi dibawah menggambarkan junction semikonduktor tipe-p dan tipe-n.
Gambar 2.13. Junction antara semikonduktor tipe-p (kelebihan hole) dan tipe-n (kelebihan elektron).
Peran dari p-n junction ini adalah untuk membentuk medan listrik sehingga elektron (dan hole) bisa diekstrak oleh material kontak untuk 17 menghasilkan
listrik. Ketika semikonduktor tipe-p dan tipe-n terkontak, maka kelebihan elektron akan bergerak dari semikonduktor tipe-n ke tipe-p sehingga membentuk kutub positif pada semikonduktor tipe-n, dan sebaliknya kutub negatif pada semikonduktor tipe-p. Akibat dari aliran elektron dan hole ini maka terbentuk medan listrik yang mana ketika cahaya matahari mengenai susuna p-n junction ini maka akan mendorong elektron bergerak dari semikonduktor menuju kontak negatif, yang selanjutnya dimanfaatkan sebagai listrik, dan sebaliknya hole bergerak menuju kontak positif menunggu elektron datang, seperti diilustrasikan pada gambar dibawah.
Gambar 2.14. Ilustrasi cara kerja sel surya dengan prinsip p-n junction
2.5.2 Struktur panel surya
Sesuai dengan perkembangan sains dan teknologi, jenis-jenis teknologi sel surya pun berkembang dengan berbagai inovasi. Ada yang disebut sel surya generasi satu, dua, tiga dan empat, dengan struktur atau bagian-bagian penyusun sel yang berbeda pula . Dalam tulisan ini akan dibahas struktur dan cara kerja dari sel surya yang umum berada dipasaran saat ini yaitu sel surya berbasis material silikon yang juga secara umum mencakup struktur dan cara kerja sel surya generasi pertama (sel surya silikon) dan kedua (thin film/lapisan tipis).
Gambar 2.15. Struktur Panel Surya.
a. Substrat/Metal backing
Substrat adalah material yang menopang seluruh komponen sel surya.
Material substrat juga harus mempunyai konduktifitas listrik yang baik karena juga berfungsi sebagai kontak terminal positif sel surya, sehinga umumnya 19 digunakan material metal atau logam seperti aluminium atau molybdenum. Untuk sel surya dye-sensitized (DSSC) dan sel surya organik, substrat juga berfungsi sebagai tempat masuknya cahaya sehingga material yang digunakan yaitu material yang konduktif tapi juga transparan seperti indium tin oxide (ITO) dan flourine doped tin oxide (FTO).
b. Material semikonduktor
Material semikonduktor merupakan bagian inti dari sel surya yang biasanya mempunyai tebal sampai beberapa ratus mikrometer untuk sel surya generasi pertama (silikon), dan 1-3 mikrometer untuk sel surya lapisan tipis.
Material semikonduktor inilah yang berfungsi menyerap cahaya dari sinar matahari. Untuk kasus gambar diatas, semikonduktor yang digunakan adalah material silikon, yang umum diaplikasikan di industri elektronik. Sedangkan untuk sel surya lapisan tipis, material semikonduktor yang umum digunakan dan telah masuk pasaran yaitu contohnya material Cu(In,Ga)(S,Se)2 (CIGS), CdTe (kadmium telluride), dan amorphous silikon, disamping materialmaterial semikonduktor potensial lain yang dalam sedang dalam penelitian intensif seperti Cu2ZnSn(S,Se)4 (CZTS) dan Cu2O (copper oxide).
Bagian semikonduktor tersebut terdiri dari junction atau gabungan dari dua material semikonduktor yaitu semikonduktor tipe-p (material-material yang disebutkan diatas) dan tipe-n (silikon tipe-n, CdS,dll) yang membentuk
p-n junction. P-n junction ini menjadi kunci dari prinsip kerja sel surya. 20 Pengertian semikonduktor tipe-p, tipe-n, dan juga prinsip p-n junction dan sel surya akan dibahas dibagian “cara kerja sel surya”.
c. Kontak metal / contact grid
Selain substrat sebagai kontak positif, diatas sebagian material semikonduktor biasanya dilapiskan material metal atau material konduktif transparan sebagai kontak negatif.
d. Lapisan antireflektif
Refleksi cahaya harus diminimalisir agar mengoptimalkan cahaya yang terserap oleh semikonduktor. Oleh karena itu biasanya sel surya dilapisi oleh lapisan anti-refleksi. Material anti-refleksi ini adalah lapisan tipis material dengan besar indeks refraktif optik antara semikonduktor dan udara yang menyebabkan cahaya dibelokkan ke arah semikonduktor sehingga meminimumkan cahaya yang dipantulkan kembali.
e. Enkapsulasi / cover glass
Bagian ini berfungsi sebagai enkapsulasi untuk melindungi modul surya dari hujan atau kotoran.( Tekhnologi surya, 2015)
2.5.3 Generasi panel surya
2.5.3.1 Generasi Pertama Sel Surya Berbasis Wafer
Gambar 2.16 Generasi Pertama Panel Surya berbasis Wafer.
Sel fotovoltaik generasi pertama terdiri dari area besar, lapisan kristal tunggal, tunggal dioda pn junction, mampu menghasilkan energi listrik yang dapat digunakan dari sumber cahaya dengan panjang gelombang sinar matahari.
Sel-sel ini biasanya dibuat dengan menggunakan proses difusi dengan wafer
silikon. Ini wafer silikon – Sel surya berbasis teknologi dominan dalam produksi komersial sel surya, akuntansi lebih dari 85% dari pasar sel surya terestrial.
2.5.3.2 Generasi kedua Thin Film
Gambar 2.17. Generasi Kedua Panel Surya berbasis Wafer.
Sel-sel ini didasarkan pada penggunaan tipis epitaksi (epitaksi mengacu pada metode penyetoran film monocrystalline pada substrat monocrystalline) deposito semikonduktor pada wafer kisi-cocok. (Pencocokan struktur kisi antara dua bahan semikonduktor yang berbeda, memungkinkan pembentukan daerah perubahan celah pita dalam materi tanpa memperkenalkan perubahan dalam struktur kristal).
Ada dua kelas sel fotovoltaik epitaxial – ruang dan terestrial. Ruang sel biasanya memiliki efisiensi yang lebih tinggi (28-30%) dalam produksi, tetapi memiliki biaya yang lebih tinggi per watt. Meskipun sel tipis-film telah dikembangkan menggunakan lebih rendah-biaya proses, mereka memiliki efisiensi yang lebih rendah (7-9%). Saat ini ada beberapa teknologi dan bahan semikonduktor diselidiki atau di produksi massal.Contoh termasuk silikon amorf, silikon polikristal, mikro-kristal silikon, telluride kadmium, tembaga indium selenide / sulfida antara lain. Sebuah keuntungan dari teknologi film tipis berkurang massa yang memungkinkan panel pas pada bahan cahaya atau fleksibel, bahkan pada tekstil. Sel surya generasi kedua sekarang terdiri dari segmen kecil dari pasar fotovoltaik terestrial, dan sekitar 90% dari pasar ruang.
2.5.3.3 Generasi ketiga Sel Fotovoltaik
Meningkatkan kinerja sambil menjaga biaya rendah generasi berikutnya sel bertujuan untuk meningkatkan kinerja listrik yang rendah dari sel-sel generasi kedua sambil menjaga biaya rendah. Mereka tidak bergantung pada pn junction
tradisional untuk memisahkan foto-pembawa muatan yang dihasilkan. Beberapa pendekatan yang digunakan dalam ini adalah Multijunction sel, nano – sel kristal, pewarna – sel peka, sel polimer, Memodifikasi spektrum kejadian (konsentrasi), Sue generasi termal kelebihan untuk meningkatkan tegangan, Untuk aplikasi ruang kuantum baik perangkat (titik kuantum, kuantum tali , dll) dan perangkat menggabungkan nanotube karbon sedang diteliti – dengan potensi efisiensi produksi hingga 45%.
2.5.3.4 Generasi keempat Sel Fotovoltaik Komposit
Ini generasi hipotetis sel surya dapat terdiri dari teknologi fotovoltaik komposit, di mana polimer dengan nano-partikel dapat dicampur bersamasama untuk membuat lapisan multi-spektrum tunggal. Multi-spektrum lapisan dapat ditumpuk untuk membuat sel-sel multi-spektrum matahari yang lebih efisien dan lebih murah. 24 Dari empat generasi yang tercantum di atas, dua yang pertama telah dikomersialisasikan. Massal dari modul fotovoltaik digunakan sejauh terdiri dari kristal silikon. Efisiensi dari modul silikon kristal bervariasi 17-22%, meskipun batas teoritis adalah sekitar 29%. Menggunakan modul ini, peternakan matahari yang besar terhubung ke grid, pembangkit listrik mandiri untuk menggemparkan desa-desa dan daerah kecil telah didirikan .
BAB 3
PERANCANGAN DAN PEMBUATAN
3.1. Diagram Blok Rangkaian
Gambar 3.1. Diagram Blok Rangkaian
Servo y
Solar Cell
LDR
LDR
LDR
Pembagi Teganga n
Pembagi Teganga n
Pembagi Teganga n
ATMEGA 8
LCD
Servo x Pembagi
Teganga n LDR
3.1.1 Fungsi Tiap Blok
1. Blok LDR : Input penanda intensitas cahaya matahari 2. Blok Mikrokontroler ATMega8 : Sebagai pusat kendali system
3. Blok Pembagi Tegangan : Pengondisi signal LDR
4. Blok LCD : Sebagai pemberitahu melalui tampilan layar 5. Blok Solar Cell : Objek yang digerakkan
6. Blok Servo X : Servo yang bergerak pada sumbu X 7. Blok Servo Y : Servo yang bergerak pada sumbu Y 3.2. Rangkaian Mikrokontroller ATMega8
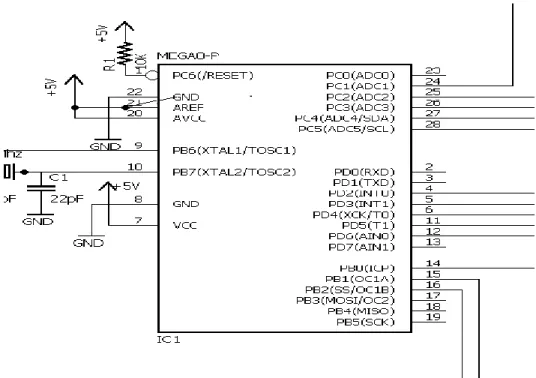
Rangkaian sistem minimum mikrokontroler ATMEGA8 dapat dilihat pada gambar 3.2 di bawah ini :
Gambar 3.2 Rangkaian sistem minimum Mikrokontroler ATMEGA8
Rangkaian mikrokontroller merupakan pusat pengendalian dari bagian input dan keluaran serta pengolahan data. Pada sistem ini digunakan mikrokontroller jenis Atmega8 yang memiliki spesifikasi sebagai berikut:
Kristal 8 MHz, yang berfungsi sebagai pembangkit clock.
Kapasitor 22 pF pada pin XTAL1 dan XTAL2.
Resistor 10 kΩ dan kapasitor 10 nF pada pin reset.
Port masukan dan keluaran yang digunakan yaitu :
1. PortC.0 digunakan sebagai Penerima data dari remote (receiver)
2. Port A.1, Port B.1 –Port B.4 digunakan sebagai data input basis transistor pada driver relay.
3.3. Perancangan Rangkaian LCD (Liquid Crystal Display)
Gambar 3.3. Rangkaian LCD
Pada alat ini, display yang digunakan adalah LCD (Liquid Crystal Display) 16 x 2. Untuk blok ini tidak ada komponen tambahan karena mikrokontroler dapat memberi data langsung ke LCD, pada LCD Hitachi - M1632 sudah terdapat driver untuk mengubah data ASCII output mikrokontroler menjadi tampilan karakter.
Pemasangan potensio sebesar 10 KΩ untuk mengatur kontras karakter yang tampil.
Gambar 3.3 berikut merupakan gambar rangkaian LCD yang dihubungkan ke mikrokontroler.
Dari gambar 3.3, rangkaian ini terhubung ke PB.1 - PB.7, yang merupakan pin I/O dua arah dan pin, komperator analog dan SPI mempunyai fungsi khusus sebagai pengiriman data secara serial. Sehingga nilai yang akan tampil pada LCD display akan dapat dikendalikan oleh Mikrokontroller Atmega8.
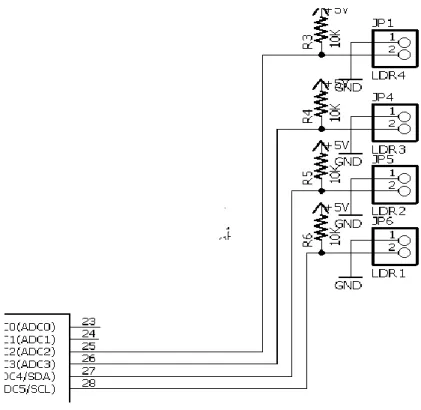
3.4. Rangkaian LDR (Light Dependent Resistor)
Gambar 3.4. Rangkaian LDR
Rangkaian LDR ini menggunakan rangkaian pembagi tegangan sebgai pengondisian sinyal. Nilai R1 yang digunakan adalah 10 K dan R2 LDR. LDR range resistansi LDR sekitar dari 200 Ohm – 10M. output rangkaian LDR dihubungkan ke pada pin ATmega 25,26,27,28.
Aplikasi rangkaian sensor cahaya ini bisa kita lihat pada Lampu taman, ketika mulai malam maka lampu akan di hidupkan otomatis, namun ketika hari terang, lampu padam. Rangkaian ini akan mempermudah kita dalam mengelola taman.
Jika kita lihat lampu jalan raya, dia juga menggunakan system rangkaian ini.
Dia menggunakan LDR kemudian trigger ke Transistor, transistor yang akan mengaktifkan relay untuk drive Lampu AC nya, sehingga ketika malam tiba, Lampu
jalan akan menyala Otomatis dan ketika hari sudah mulai Terang, Lampu akan Padam secara otomatis. Bayangkan jika jumlah lampu jalan yang ribuan itu di hidupkan atau di matikan secara manual, maka dapat dibayangkan betapa sulit nya mengontrol itu semua.
Rangkaian sensor ini juga bisa di gunakan untuk mendeteksi kerusakan pada lampu pada kendali otomatis, dia sebagai feed back nanti nya. Contoh nya adalah ketika kita menghidupkan lampu jarak jauh, kemudian lampu di aktifkan, maka sensor cahaya akan mendeteksi, apakah ada cahaya, jika tidak ada cahaya maka berarti ada kerusakan pada system, apakah lampu nya yang rusak, atau driver lampu ac nya yang rusak, ini yang pernah saya temui ketika membuat menghidupkan lampu dengan SMS.
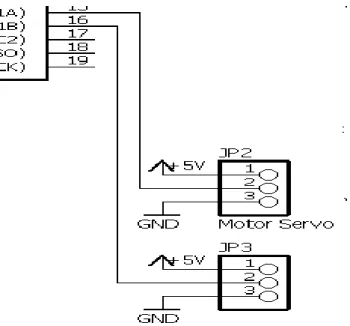
3.5. Rangkaian Motor Servo
Gambar 3.5. Rangkaian Motor Servo
Motor servo adalah sebuah motor dengan sistem closed feedback di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor, serangkaian gear, potensiometer dan rangkaian kontrol. Motor servo biasanya hanya bergerak mencapai sudut tertentu saja dan tidak kontinyu seperti motor DC maupun motor stepper. Walau demikian, untuk beberapa keperluan tertentu, motor servo dapat
dimodifikasi agar bergerak kontinyu. Pada robot, motor ini sering digunakan untuk bagian kaki, lengan atau bagianbagian lain yang mempunyai gerakan terbatas dan membutuhkan torsi cukup besar. Motor servo adalah motor yang berputar lambat, dimana biasanya ditunjukkan oleh rate putarannya yang lambat, namun demikian memiliki torsi yang kuat karena internal gearnya.
Lebih dalam dapat digambarkan bahwa sebuah motor servo memiliki :
3 jalur kabel : power, ground, dan control
Sinyal control mengendalikan posisi
Operasional dari servo motor dikendalikan oleh sebuah pulsa selebar ± 20 ms, dimana lebar pulsa antara 0.5 ms dan 2 ms menyatakan akhir dari range sudut maksimum.
Konstruksi didalamnya meliputi internal gear, potensiometer, dan feedback control.
A. JENIS-JENIS MOTOR SERVO:
Motor Servo Standar 180°
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°.
Motor Servo Continuous
Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu).
B. KEGUNAAN MOTOR SERVO
Kebanyakan motor servo digunakan sebagai :
• Manipulators.
• Moving camera’s.
• Robot arms.
3.6. Rangkaian Solar Cell
Gambar 3.6. Rangkaian Solar Cell
Solar cell merupakan suatu panel yang terdiri dari beberapa sel dan beragam jenis. Penggunaan solar cell ini telah banyak di gunakan di negara-negara berkembang dan negara maju dimana pemanfaatannya tidak hanya pada lingkup kecil tetapi sudah banyak digunakan untuk keperluan industri sehingga energi matahari dapat dijadikan sebagai sumber energi alternatif. Energi matahari mempunyai banyak keuntungan dibandingkan dengan energi lain. Keuntungan yang dapat diperoleh adalah jumlahnya cukup besar, kontinyu, tidak menimbulkan polusi, terdapat dimana-mana dan tidak mengeluarkan biaya.
a. Klasifikasi Energi Matahari.
Solar Energy Panel dari NASA National Aeronautic and Space Administration) tahun 1997 mengklasifikasikan penggunaan energi matahari ke dalam dua sistem koleksi yaitu sistem koleksi alamiah dan sistem koleksi teknologi.
b. Radiasi Surya.
Intensitas radiasi matahari akan berkurang oleh penyerapan dan pemantulan oleh atmosfer saat sebelum mencapai permukaan bumi. Ozon di atmosfer menyerap radiasi dengan panjang gelombang pendek ( ultraviolet ) sedangkan karbondioksida dan uap air menyerap sebagian radiasi dengan panjang gelombang yang lebih panjang ( infra merah ). Selain pengurangan
radiasi bumi langsung (sorotan) oleh penyerapan tersebut, masih ada radiasi yang dipancarkan oleh molekul-molekul gas, debu dan uap air dalam atmosfer.
Manfaat Sloar Cell
Keuntungan dari sisi ekonomi pemanfaatan solar cell antara lain :
Hemat, karena tidak perlu memerlukan bahan bakar;
Dapat dipasang dimana saja dan dapat dipindahkan sesuai dengan yang dibutuhkan;
Dapat diterapkan secara sentralisasi (PLTS ditetapkan di suatu area dan listrik yang dihasilkan disalurkan melalui jaringan distribusi ketempat-tempat yang membutuhkan) maupun desentralisasi (setiap system berdiri sendiri/individual, tidak memerlukan jaringan distribusi);
Bersifat moduler. Kapasitas listrik yang dihasilkan dapat disesuaikan dengan cara merangkai modul secara seri dan parallel;
Dapat dioperasikan secara otomatis maupun menggunakan operasi;
Tanpa suara dan tidak menimbulkan operasi lingkungan.
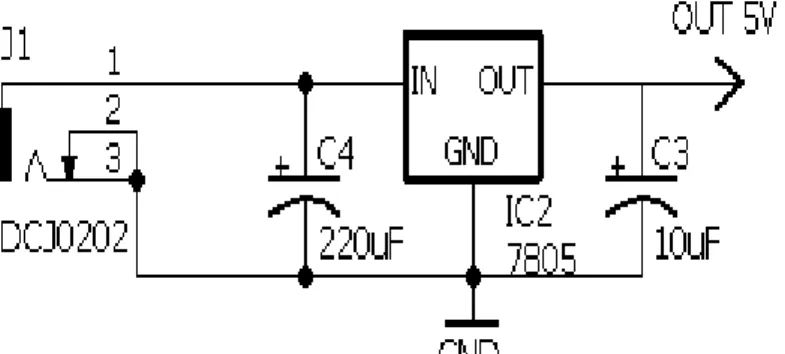
3.7. Rangkaian Pembagi Tegangan
Gambar 3.7. Rangkaian Pembagi Tegangan
Biasanya digunakan untuk membagi tegangan atau mengkonversi dari resistensi menjadi sebuah tegangan. Pada rangkaian ini digunakan sebagai pengkodisian sinyal. Biasanya fungsi dari pembagi tegangan ini untuk mengubah atau mengkonversikan dari tegangan tegangan yang lebih besar untuk memberi bias kepada komponen yang aktif dalam rangkaian tersebut.
3.8 FLOWCHART SYSTEM
Start
Inisialisasi
Set Servo
If s2&s4=1
If s2&s3=1
If s1&s2=1
If s1&s4=1
If s1&s2&s3&s4'
=1
Servo berhenti
selesai Servo kearah
timur
Servo kearah selatan
Servo kearah barat
Servo kearah utara
Ya
Tidak
Ya
Ya
Ya
Tidak Tidak Tidak
Gambar 3.8 Flowchart Sistem
BAB 4
PENGUJIAN DAN HASIL 4.1. Program pengujian Mikrokontroller ATMega8
Pemograman menggunakan mode ISP (In System Programming) mikrokontroler harus dapat deprogram pada papan rangkaian dan rangkaian mikrokontroler harus dapat dikenali oleh program downloader. Pada pengujian ini berhasil dilakukan dengan dikenalinya jenis mikrokontroler oleh program
downloader yaitu Atmega8.
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
delay(1000);
digitalWrite(LED_BUILTIN, LOW);
delay(1000);
}
Atemega8 mengunakan Kristal dengan frekuensi 8 Mhz,apabila Chip Signature sudah dikenali baik dan dalam waktu singkat, bias dikatakan rangkaian mikrokontroler bekerja baik dengan mop ISP-nya.
4.2. Program Pengujian LCD
Bagian ini hanya terdiri darisebuah LCD dot matriks 2 x 16 karakter yang berfungsi sebagai tampilan hasil pengukuran dan tampilan dari beberapa keterangan.
LCD di hubungkan langsung ke port B dari mikrokontroler yang berfungsi mengirimkan data hasil pengolahan untuk ditampilkan dalam bentuk alphabet dan numeric pada LCD.display karakter pada LCD diatur oleh pin EN, RS, dan RW:
Jalur EN dinamakan Enable. Jalur ini digunakan untuk memberitahu LCD bahwa anda sedang mengirimkan sebuah data. Untuk mengirimkan data ke LCD, maka melalui program EN harus dibuat logika low “0” dan set (high) pada dua jalur control yang lain RS dan RW. Jalur RW adalah jalur kontrol Red/White. Ketika RW berlogika low (0), maka informasi pada bus data akan dituliskan pada layar LCD.
Ketika RW berlogika high (1), maka program akan melakukan pembacaan memori dari LCD. Sedangkan pada aplikasi umum pin RW selalu diberi logika low (0).
Berdasarkan keterangan di atas maka kita sudah dapat membuat program untuk menampilkan karakter pada display LCD. Adapun program yang diberikan ke mikrokontroler untuk menampilkan karakter pada display LCD adalah sebagai berikut:
#include <LiquidCrystal.h>
LiquidCrystal lcd(8, 6, 5, 4, 3, 2);
void setup() { lcd.begin(16, 2);
lcd.print("hello, world!");
}
void loop() {
lcd.setCursor(0, 1);
lcd.print(millis() / 1000);
}
4.3. Program motor Servo
Dalam pengujian ini digunakan motor servo standar 1800 dimana, motor servo jenis ini hanya bergerak dua arah (CW dan CCW) dengan defleksi masing- masing sudut mencapai 900 sehingga total defleksi sudut dari kanan-tengah-kiri adalah 1800. Berikut adalah programnya:
#include <Servo.h>
Servo myservo;
int pos = 0;
void setup() {
myservo.attach(9);
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) {