1
ABSTRAK
Yohanes Raharja Harsono. 2015. Model Matematika untuk Masalah Aliran
Lalu Lintas. Skripsi. Program Studi Matematika, Jurusan Matematika,
Fakultas Sains dan Teknologi, Universitas Sanata Dharma, Yogyakarta.
Skripsi ini membahas model matematika aliran lalu lintas, terutama yang berkaitan dengan kondisi saat lampu merah berubah menjadi hijau. Kondisi inilah yang biasanya merupakan penyebab kemacetan lalu lintas. Harapannya, hasil dalam skripsi dapat diterapkan untuk menghindari timbulnya kemacetan. Yang dibahas di sini adalah mengenai pergerakan dari beberapa mobil sebagai suatu kesatuan secara makro, bukan pergerakan mobil per mobil secara individu.
Model-model aliran lalu lintas disusun berdasarkan teori-teori matematika. Salah satu model yang sederhana adalah car following model. Model ini disusun menggunakan teori persamaan diferensial biasa. Model yang lebih mendekati dunia nyata adalah yang disusun berdasarkan hukum kekekalan yang menghasilkan suatu persamaan diferensial parsial. Model dalam bentuk persamaan diferensial parsial akan diselesaikan menggunakan metode karakteristik. Selain itu, penulis akan menggunakan suatu teori linearisasi persamaan diferensial untuk mempermudah dalam mencari penyelesaikan pendekatan dari model aliran lalu lintas.
Skripsi ini juga menyajikan hasil simulasi komputer berdasarkan beberapa model yang dipelajari. Simulasi tersebut disusun menggunakan perangkat lunak MATLAB. Beberapa kode MATLAB untuk aliran lalu lintas juga disertakan untuk memudahkan pembaca dalam memahami masalah yang dibahas.
Kata kunci : aliran lalu lintas, persamaan diferensial parsial, metode
2
Yohanes Raharja Harsono. 2015. Mathematical Models for Traffic Flow Problems. Thesis. Mathematics Study Program, Department of Mathematics, Faculty of Science and Technology, Sanata Dharma University, Yogyakarta.
This thesis studies mathematical models for traffic flows, especially those relating to the condition when the traffic light turns from red to green. This condition usually causes a traffic congestion. We hope that the results in this thesis can be applied to alleviate the traffic congestion. The condition that will be discussed is the movement of some cars in a macroscopic way, instead of the movement of an individual car.
Traffic flow models are constructed based on mathematical theory. One of the models, which is a simple one, is the car following model. This model is constructed based on the theory of ordinary differential equations. Another model, which is more realistic, is the one developed according to conservation laws resulting to a partial differential equation. The traffic flow model in the form of a partial differential equation will be solved using the characteristic method. In addition, we will use a linearization of the differential equation, so we can find the approximate solution of the traffic flow model easier.
This thesis also presents computer simulation results based on the studied models. Simulations are conducted using the MATLAB software. Some MATLAB codes for traffic flow simulations are also given to help the readers in the understanding of the discussed problems.
Key words : traffic flow, partial differential equations, characteristic methods, car following
i
MODEL MATEMATIKA
UNTUK MASALAH ALIRAN LALU LINTAS
SKRIPSI
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Sains
Program Studi Matematika
Oleh :
Yohanes Raharja Harsono
NIM : 103114011
PROGRAM STUDI MATEMATIKA
JURUSAN MATEMATIKA
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
MATHEMATICAL MODELS
FOR TRAFFIC FLOW PROBLEMS
THESIS
Presented as Partial Fulfillment of the Requirements
to Obtain the Degree of Sarjana Sains
Mathematics Study Program
By :
Yohanes Raharja Harsono
NIM : 103114011
MATHEMATICS STUDY PROGRAM
DEPARTMENT OF MATHEMATICS
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
vi
LEMBAR PERNYATAAN PERSETUJUAN
PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama : Yohanes Raharja Harsono
Nomor Mahasiswa : 103114011
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan Universitas Sanata Dharma karya ilmiah saya yang berjudul :
Model Matematika Untuk Masalah Aliran Lalu Lintas
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, me-ngalihkan dalam bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara terbatas, dan mempublikasikannya di Internet atau media lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya maupun memberikan royalti kepada saya selama tetap mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Dibuat di Yogyakarta
Pada tanggal : 17 Februari 2015
Yang menyatakan
vii
ABSTRAK
Yohanes Raharja Harsono. 2015. Model Matematika untuk Masalah Aliran
Lalu Lintas. Skripsi. Program Studi Matematika, Jurusan Matematika,
Fakultas Sains dan Teknologi, Universitas Sanata Dharma, Yogyakarta.
Skripsi ini membahas model matematika aliran lalu lintas, terutama yang berkaitan dengan kondisi saat lampu merah berubah menjadi hijau. Kondisi inilah yang biasanya merupakan penyebab kemacetan lalu lintas. Harapannya, hasil dalam skripsi dapat diterapkan untuk menghindari timbulnya kemacetan. Yang dibahas di sini adalah mengenai pergerakan dari beberapa mobil sebagai suatu kesatuan secara makro, bukan pergerakan mobil per mobil secara individu.
Model-model aliran lalu lintas disusun berdasarkan teori-teori matematika. Salah satu model yang sederhana adalah car following model. Model ini disusun menggunakan teori persamaan diferensial biasa. Model yang lebih mendekati dunia nyata adalah yang disusun berdasarkan hukum kekekalan yang menghasilkan suatu persamaan diferensial parsial. Model dalam bentuk persamaan diferensial parsial akan diselesaikan menggunakan metode karakteristik. Selain itu, penulis akan menggunakan suatu teori linearisasi persamaan diferensial untuk mempermudah dalam mencari penyelesaikan pendekatan dari model aliran lalu lintas.
Skripsi ini juga menyajikan hasil simulasi komputer berdasarkan beberapa model yang dipelajari. Simulasi tersebut disusun menggunakan perangkat lunak MATLAB. Beberapa kode MATLAB untuk aliran lalu lintas juga disertakan untuk memudahkan pembaca dalam memahami masalah yang dibahas.
Kata kunci : aliran lalu lintas, persamaan diferensial parsial, metode
viii
ABSTRACT
Yohanes Raharja Harsono. 2015. Mathematical Models for Traffic Flow
Problems. Thesis. Mathematics Study Program, Department of Mathematics,
Faculty of Science and Technology, Sanata Dharma University, Yogyakarta.
This thesis studies mathematical models for traffic flows, especially those relating to the condition when the traffic light turns from red to green. This condition usually causes a traffic congestion. We hope that the results in this thesis can be applied to alleviate the traffic congestion. The condition that will be discussed is the movement of some cars in a macroscopic way, instead of the movement of an individual car.
Traffic flow models are constructed based on mathematical theory. One of the models, which is a simple one, is the car following model. This model is constructed based on the theory of ordinary differential equations. Another model, which is more realistic, is the one developed according to conservation laws resulting to a partial differential equation. The traffic flow model in the form of a partial differential equation will be solved using the characteristic method. In addition, we will use a linearization of the differential equation, so we can find the approximate solution of the traffic flow model easier.
This thesis also presents computer simulation results based on the studied models. Simulations are conducted using the MATLAB software. Some MATLAB codes for traffic flow simulations are also given to help the readers in the understanding of the discussed problems.
Key words : traffic flow, partial differential equations, characteristic methods,
ix
KATA PENGANTAR
Puji syukur kepada Tuhan Yang Maha Esa karena atas segala berkat dan rahmat-Nya penulis dapat menyelesaikan tugas akhir yang berjudul “Model Matematika untuk Masalah Aliran Lalu Lintas”.
Penulisan tugas akhir ini diajukan untuk memenuhi salah satu syarat memperoleh gelar sarjana Matematika Program Studi Matematika Universitas Sanata Dharma Yogyakarta.
Dengan terselesaikannya penulisan tugas akhir ini, penulis mengucapkan terima kasih kepada pihak-pihak yang telah membantu memberikan dukungan baik berupa saran, doa, maupun secara finansial. Ucapan terimakasih sebanyak-banyaknya ditujukan kepada :
1. Bapak dan Ibu yang telah memberikan dukungan kepada penulis baik moral, spiritual, material, dan juga ucapan semangat yang selalu diberikan selama masa studi.
2. Bapak Sudi Mungkasi, S.Si., M.Math.Sc., Ph.D. selaku dosen pembimbing yang telah memberikan dukungan, bantuan dan dorongan kepada penulis selama mengikuti proses perkuliahan sampai dengan penyelesaian penulisan ini.
3. Ibu Paulina Heruningsih Prima Rosa, S.Si., M.Sc. selaku Dekan Fakultas Sains Dan Teknologi Universitas Sanata DharmaYogyakarta.
4. Bapak Y. G. Hartono, S.Si., M.Sc., Ph.D. selaku Ketua Prodi Matematika Fakultas Sains Dan Teknologi Universitas Sanata Dharma Yogyakarta. 5. Ibu Lusia Krismiyati, M. si. selaku dosen matematika Fakultas Sains Dan
Teknologi Universitas Sanata Dharma Yogyakarta yang telah membantu dalam pemilihan topik penulisan ini.
xi
DAFTAR ISI
Halaman
HALAMAN JUDUL ... i
HALAMAN JUDUL DALAM BAHASA INGGRIS ... ii
HALAMAN PERSETUJUAN PEMBIMBING ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI... vi
ABSTRAK ... vii
ABSTRACT ... viii
KATA PENGANTAR ... viii
DAFTAR ISI ... x
DAFTAR GAMBAR ... xiii
BAB I PENDAHULUAN ... 1
A.Latar Belakang ... 1
B.Rumusan Masalah ... 7
C.Batasan Masalah ... 7
D.Tujuan Penulisan ... 7
xi
C. Kecepatan Individu dan medan kecepatan ... 23
D. Aliran lalu lintas dan kepadatan lalu lintas ... 27
E. Konservasi jumlah mobil ... 40
F. Hubungan Kecepatan dan Kepadatan... 48
G. Aliran lalu lintas ... 51
BAB III MODEL-MODEL ALIRAN LALU LINTAS ... 56
A. Steady state car following model ... 56
B. Model Persamaan Diferensial Parsial... 62
C. Interpretasi mengenai gelombang lalu lintas ... 67
D. Contoh aliran lalu lintas yang hamper seragam ... 69
E. Metode karakteristik lalu lintas tak seragam ... 73
F. Sesudah lampu merah berubah menjadi hijau ... 79
G. Hubungan linear kecepatan dan kepadatan ... 93
H. Sebuah contoh kepadatan awal yang bervariasi ... 105
BAB IV SIMULASI ALIRAN LALU LINTAS ... 112
A. Satu mobil bergerak konstan ... 112
B. Beberapa mobil bergerak konstan ... 113
xii
BAB V PENUTUP ... 121
A. Kesimpulan ... 121
B. Saran ... 121
xiii
DAFTAR GAMBAR
Gambar 1-1 Kondisi lalu lintas saat lampu merah menjadi hijau ... 3
Gambar 1-2 Kondisi lalu lintas saat lampu hijau menjadi merah ... 3
Gambar 2-1 Perambatan untuk persamaan gelombang tingkat satu ... 14
Gambar 2-2 Kondisi jalan, posisi mobil ditandai dengan ….. ... 23
Gambar 2-3 Kondisi dua mobil yang berada pada posisi 0 dan L……….24
Gambar 2-4 Kondisi jalan yang digambarkan secara vertikal ... 25
Gambar 2-5 Posisi mobil dengan kecepatan yang berbeda……. ... 27
Gambar 2-6 Data banyaknnya mobil yang lewat pada suatu waktu…… ... 28
Gambar 2-7 Aliran lalu lintas sebagai fungsi waktu ... 29
Gambar 2-8 Aliran lalu lintas sebagai fungsi kontinu dari waktu ... 31
Gambar 2-9 Kepadatan lalu lintas sama dengan inverse dari jarak ... 32
Gambar 2-10 Jarak dua mobil dan panjang mobil ... 32
Gambar 2-11 Penghitungan data menggunakan potongan mobil ... 33
Gambar 2-12 Kepadatan lalu lintas sebagai fungsi posisi ... 34
Gambar 2-13 Contoh signifikan interval hitungan... 34
Gambar 2-14 Diagram jarak-jarak mobil ... 35
Gambar 2-15 Kepadatan lalu lintas dengan interval yang besar ...37
Gambar 2-16 Pergerakan mobil dari pengamat ...38
Gambar 2-17 Banyaknya mobil yang melalu pengamat dalam jam ...39
Gambar 2-18 Dalam waktu yang kecil mobil akan melalu pengamat ...40
xiv
Gambar 2-20 Aliran yang terjadi pada maksimum lokal ... 53
Gambar 2-21 Rentang kecepatan maksimum yang tidak dapat diobservasi ... 54
Gambar 3-1 Situasi steady state ... 58
Gambar 3-2 Situasi steady state ... 60
Gambar 3-3 Gerakan mobil dengan kecepatan yang berbeda ... 62
Gambar 3-4 Jalan masuk kendaraan ... 70
Gambar 3-5 Daerah mobil yang seragam dan tidak seragam ... 71
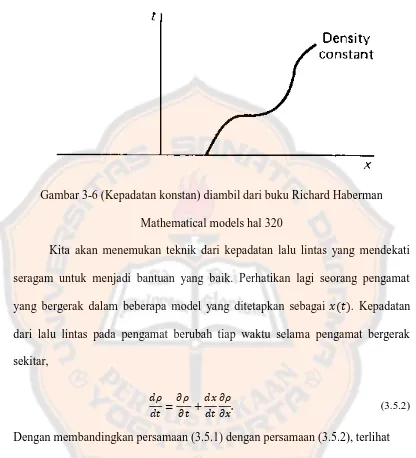
Gambar 3-6 Kepadatan konstan ... 74
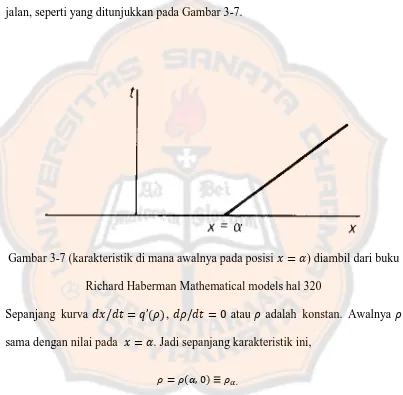
Gambar 3-7 Karakteristik di mana awalnya pada posisi ... 76
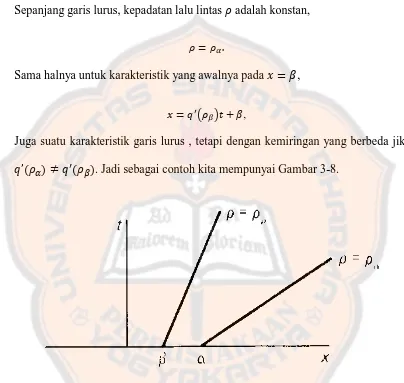
Gambar 3-8 Karakteristik tegak lurus mempunyai kemiringan yang berbeda ... 77
Gambar 3-9 Gelombang kepadatan ... 78
Gambar 3-10 Distribusi awal kepadatan lalu lintas ... 80
Gambar 3-11 Gelombang rarefactive ... 81
Gambar 3-12 Karakteristik kepadatan lalu lintas ... 82
Gambar 3-13 Sebelum dan sesudah lampu merah menjadi hijau ... 84
Gambar 3-14 Kepadatan saat lampu masih merah ... 86
Gambar 3-15 Kepadatan lalu lintas yang awalnya diskontinu ... 86
Gambar 3-16 Diagram ruang waktu posisi karakteristik ... 87
Gambar 3-17 Lalu lintas menyebar keluar setelah lampu menjadi hijau ... 88
Gambar 3-18 Karakteristik fanlike... 89
Gambar 3-19 Diagram dasar lalu lintas jalan ... 91
Gambar 3-20 Kepadatan dari kurva yang kemiringannya ... 92
xv
Gambar 3-22 Hubungan parabola aliran keppadatan ... 95
Gambar 3-23 Diagram ruang waktu untuk masalah lalu lintas ... 96
Gambar 3-24 Lalu lintas sebelum dan sesudah lampu menjadi hijau ... 97
Gambar 3-25 Perbedaan kecepatan gelombang kepadatan ... 98
Gambar 3-26 Perbedaan kecepatan gelombang kepadatan ... 98
Gambar 3-27 Jalur mobil ketika mobil tidak bergerak ……….. 99
Gambar 3-28 Jalur mobil yang menambah kecepatan……… 102
Gambar 3-29 Jalur mobil:sketsa grafik ... 104
Gambar 3-30 Jalur mobil:sketsa grafik ... 104
Gambar 3-31 Jalur mobil:sketsa grafik ... 104
Gambar 3-32 Karakteristik tak pararel tak berpotongan………... 106
Gambar 3-33 Kepadatan lalu lintas awal……… 108
1
BAB I
PENDAHULUAN
A. Latar Belakang
2
menjadi merah. Lampu lalu lintas pertama kali ada karena Lester Fransworth Wire yang merupakan penemu lampu lalu lintas, saat itu melihat adanya tabrakan antara mobil dan kereta kuda. Ia merasa bahwa dengan aturan lalu lintas yang digunakan saat itu sangatlah tidak aman karena meskipun ada suatu aturan, tetap saja kecelakaan masih sering terjadi. Oleh karena itu ditemukanlah metode yang lebih baik untuk mengatasi permasalahan lalu lintas itu dengan menggunakan lampu lalu lintas.
Dalam pengaturannya lampu lalu lintas memiliki dua sistem yaitu, fixed time traffic signal yaitu pengaturan lampu lalu lintas yang tidak mengalami perubahan sepanjang waktu. Jadi sistem ini tidak memperhatikan kepadatan kendaraan. Sedangkan yang kedua adalah actuated traffic signal, yang berarti pengaturan lampu lalu lintas yang berubah tiap waktu tertentu. Jadi sistem ini memperhatikan kepadatan kendaraan saat itu. Misalnya pada pagi hari yang padat akan berbeda dengan pada malam hari yang tidak padat.
3
meminimalkan polusi dari kendaraan, mengurangi adanya kecelakaan, dan sebagainya.
Pada saat lampu lalu lintas berubah dari merah menjadi hijau maka akan terjadi pergerakan dari mobil yang sedang berjajar di lalu lintas tersebut. Mobil yang awalnya memiliki kecepatan km/jam akan mulai menambah kecepatannya. Hal ini akan diikuti mobil-mobil yang ada di belakangnya hingga nantinya lampu kembali menjadi merah. Pada saat lampu hijau mulai memasuki kuning maka mobil akan mulai mengurangi kecepatan hingga pada saat lampu telah menjadi merah mobil-mobil tersebut bisa berhenti atau berada pada kecepatan km/jam.
Gambar 1-1 Kondisi lalu lintas saat lampu merah menjadi hijau (Gambar diambil pada tanggal 11 Maret
2014)
Gambar 1-2 Kondisi lalu lintas saat lampu hijau menjadi merah (Gambar diambil pada tanggal 10
Desember 2014)
4 disebabkan karena mobil berada dalam kondisi yang berimpitan jadi diasumsikan
jaraknya . Densitas di sini akan bernilai
namun masih harus diperhatikan
jarak yang dihitung. Misalkan jaraknya dan yang diperoleh maka
densitas dalam jarak tersebut adalah dikalikan (diperoleh dari jaraknya) jadi
densitasnya dalam kilometer.
Asumsikan bahwa mobil yang berjajar tidak berhingga banyaknya dan tentu saja tidak bergerak (meskipun pada kenyataannya berhingga namun bisa sangat panjang). Jika lampu merah menyala cukup lama maka dapat diasumsikan bahwa tidak ada lalu lintas di depan lampu, untuk . Andaikan bahwa pada lampu lalu lintas berubah dari merah menjadi hijau. Persamaan diferensial parsial dari kesetimbangan mobil adalah sebagai berikut
5
dengan adalah fungsi aliran lalu lintas terhadap . Dengan syarat awal
{
dengan catatan bahwa adalah posisi di belakang lalu lintas yang diasumsikan saling berimpitan dan adalah posisi di depan lalu lintas yang aliran lalu lintasnya akan kosong karena adanya lampu merah.
Kondisi tersebut merupakan fungsi diskontinu.
Di mana adalah kecepatan dari mobil. Kecepatan dari mobil juga bergantung pada posisi dan waktu, sehingga .
Karena tetap konstan maka densitas bergerak dengan kecepatan konstan. Karakteristiknya berupa garis lurus dalam bidang
di mana setiap karakteristik bisa mempunyai perbedaan integrasi konstan k.
6
Ini merupakan persamaan diferensial parsial yang menunjukkan hubungan antara densitas lalu lintas dan aliran lalu lintas dengan mengasumsikan jumlah mobil tidak akan berkurang maupun bertambah. Ini akan selalu valid di manapun untuk semua pada waktu kapanpun. Di mana persamaan ini disebut kesetimbangan mobil. Yang dimaksud kesetimbangan mobil di sini adalah jumlah mobil yang pergi saat lampu merah telah menjadi hijau diasumsikan sama dengan jumlah mobil yang datang dan menunggu lampu lalu lintas dari merah kembali menjadi hijau.
Variabel-variabel yang ada pun tentunya akan sangat dipengaruhi kondisi dari lalu lintas pada saat itu. Misalnya pada pagi hari di mana banyak anak yang harus bersekolah dan banyak masyarakat yang harus berangkat kerja, maka pada saat itu lalu lintas akan lebih padat jika dibandingkan dengan jam-jam saat anak-anak sedang di sekolah dan orang dewasa sedang bekerja. Begitu pula saat jam-jam anak sekolah pulang sekolah dan masyarakat yang pulang dari kerja, maka pada jam-jam tersebut akan jauh lebih padat. Pada saat lalu lintas padat maka secara otomatis kendaraan akan berjalan dengan lebih lambat.
7
kondisi tersebut, sebelumnya harus dibahas mengenai dasar-dasar variabel dari suatu lalu lintas. Dasar-dasar tersebut adalah kecepatan, densitas, dan aliran.
B. Rumusan Masalah
Rumusan masalah yang akan dibahas dalam skripsi ini adalah sebagai berikut:
1. Bagaimana membuat model matematika untuk aliran lalu lintas?
2. Bagaimana model densitas lalu lintas saat lampu merah berubah menjadi hijau?
C. Batasan Masalah
Dalam tulisan ini penulis hanya akan membahas mengenai masalah aliran lalu lintas yang melibatkan variabel waktu dan variabel ruang satu dimensi.
D. Tujuan Penulisan
Tujuan penulisan ini adalah untuk memperoleh model matematika untuk aliran lalu lintas dan sifat kepadatan lalu lintas saat lampu merah menjadi hijau.
E. Metode Penulisan
8
F. Manfaat
Skripsi ini diharapkan memberikan manfaat bagi pembaca dan juga bagi penulis sendiri, yaitu:
1. memberi wawasan pengetahuan tentang kondisi lalu lintas saat lampu merah berubah menjadi hijau,
2. memberikan pengalaman penulisan karya ilmiah.
G. Sistematika Penulisan
Skripsi ini ditulis menggunakan sistematika yang meliputi empat bab, yaitu: Pendahuluan, Landasan Teori, Isi, dan Penutup.
Dalam BAB I PENDAHULUAN, dipaparkan latar belakang, rumusan dan batasan masalah, serta tujuan, manfaat, metode dan sistematika penulisan skripsi.
9
BAB III MODEL MATEMATIKA ALIRAN LALU LINTAS membahas mengenai beberapa dasar matematika yang berhubungan dengan aliran lalu lintas. Pada bab ini secara khusus akan dibahas masalah model matematika saat lampu merah menjadi hijau. Dalam kondisi lampu merah menjadi hijau tersebut akan dibahas secara lebih mendetail mengenai kondisi densitas lalu lintasnya.
BAB IV SIMULASI ALIRAN LALU LINTAS menyajikan progam komputer dan hasil simulasi aliran lalu lintas. Hasil simulasinya antara lain saat mobil bergerak secara konstan, tiga mobil bergerak secara konstan, dan kondisi pergerakan lalu lintas saat lampu merah berubah menjadi hijau.
10
BAB II
LANDASAN TEORI
A. Metode Karakteristik
Pada bagian ini akan dijelaskan metode karakteristik untuk persamaan diferensial. Persamaan gelombang satu dimensi dapat ditulis sebagai
(2.1.1)
Perhitungan yang sederhana menunjukkan bahwa persamaan tersebut dapat difaktorkan dengan dua cara:
( ) ( ) (2.1.2)
( ) ( ) (2.1.3)
karena turunan campuran keduanya tidak ada pada keduanya. Jika kita memisalkan
(2.1.4)
(2.1.5)
Kita melihat bahwa persamaan gelombang satu dimensi hasilnya adalah dua persamaan gelombang tingkat satu:
11
Metode Karakteristik untuk Persamaan Diferensial Parsial Tingkat Satu
Kita mulai dengan mendiskusikan salah satu dari persamaan diferensial parsial yang sederhana:
(2.1.6)
Metode yang akan kita kembangkan akan membantu dalam menganalisa persamaan gelombang dimensi satu (2.1.1). Kita mempertimbangkan laju perubahan dari yang diukur oleh pengamat yang bergerak, .
bergerak ke daerah yang kemungkinan memiliki yang berbeda. Bandingkan (2.1.7) dengan persamaan diferensial parsial untuk , persamaan (2.1.6). Ini jelas bahwa jika pengamat bergerak dengan kecepatan , yaitu jika
12
(2.1.9)
Jadi, adalah konstan pada kurva
.
Karakteristik
Dengan cara ini, persamaan diferensial parsial (2.1.6) telah diganti dengan dua persamaan diferensial biasa, (2.1.8) dan (2.1.9). Dengan mengintegralkan persamaan (2.1.8) hasilnya
(2.1.10)
persamaan untuk keluarga dari karakteristik paralel dari persamaan (2.1.6). Perhatikan bahwa , . Variabel adalah konstan sepanjang garis ini. Variabel menyebar sebagai gelombang dengan kecepatan gelombang .
Penyelesaian umum. Jika diberi nilai pada saat awal
(2.1.11)
maka mari kita menentukan pada titik . Karena adalah konstan sepanjang karakteristik,
diberikan dan , parameter diketahui dari karakteristik, , dan
2.1.12
13
Kita dapat menganggap sebagai fungsi sembarang. Untuk memastikan ini, kita substitusi (2.1.12) kembali pada persamaan diferensial parsial (2.1.6). Menggunakan aturan rantai,
14
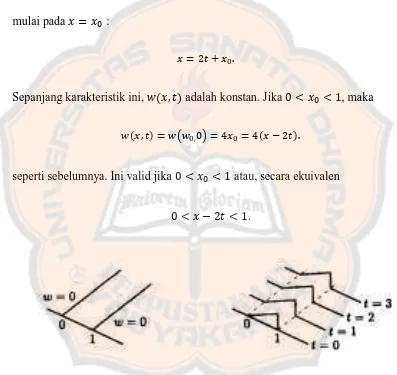
digambarkan pada Gambar 2-1. jika . Dinyatakan dengan menggeser,
Untuk menurunkan penyelesaian analitik, kita menggunakan karakteristik yang mulai pada :
Sepanjang karakteristik ini, adalah konstan. Jika , maka
( )
seperti sebelumnya. Ini valid jika atau, secara ekuivalen
.
Gambar 2-1 (perambatan untuk persamaan gelombang tingkat satu) diambil dari buku Richard Haberman Applied Partial Differential Equation hal 540
15 karakteristik tidak berupa garis lurus tetapi memenuhi
(2.1.16)
di mana karakteristik dimulai ( ) pada . Sepanjang karakteristik, dengan mengintegralkan persamaan diferensial biasa (2.1.15), kita mendapatkan
(2.1.17)
Untuk memenuhi kondisi awal pada , , kita mempunyai
, sehingga penyelesaian masalah nilai awal dengan metode
karakteristik adalah
16
Karena adalah fungsi sembarang dari , persamaan (2.1.18) adalah penyelesaian umum dari persamaan diferensial parsial (2.1.13). Metode karakteristik dapat digunakan untuk menentukan penyelesaian umum dengan cara yang berbeda. Sembarang konstan yang menyelesaikan persamaan diferensial biasa adalah fungsi sembarang untuk satu sama lain. Dengan cara ini, dalam persamaan (2.1.17) adalah fungsi sembarang dari , dan kita mendapatkan langsung dari persamaan (2.1.17) penyelesaian umum dari persamaan diferensial parsial :
(2.1.19)
di mana adalah fungsi sembarang dari . Masalah nilai awal sekarang dapat diselesaikan dari penyelesaian umum (2.1.19).
B. Persamaan Cauchy-Euler
Titik biasa adalah suatu titik dalam suatu domain di mana fungsi variabel kompleks yang diberikan analitik. Nilai disebut titik singular regular dari persamaan diferensial biasa
(2.2.1)
Jika dan mempunyai deret Taylor yang konvergen di sekitar . Sebagai contoh dan dapat ditulis sebagai deret pangkat dalam ( ):
17
dengan dan konstan, dan maka bukan merupakan faktor persekutuan dari koefisien. Sembarang titik yang bukan merupakan titik biasa dan bukan titik singular regular disebut sebagai titik singular irregular. Di sini, kita hanya akan mempertimbangkan persamaan diferensial biasa yang paling sederhana dengan titik singular regular pada . Persamaan diferensial biasa ini disebut persamaan Cauchy-Euler, dan memiliki bentuk
(2.2.2)
dengan dan konstan. Catat bahwa (2.2.1) tereduksi menjadi persamaan Cauchy Euler ketika kita hanya memandang suku terdepan dalam ekspansi deret Taylor dari fungsi dan .
Ansatz yang tepat untuk (2.2.2) adalah , ketika dan ketika , dengan konstan. Sesudah substitusi menjadi (2.2.2), kita mendapatkan untuk positif dan negatif
| | | | | |
Dan kita meneliti bahwa ansatz kita mengalami kanselasi dari | | . Kita mendapat persamaan kuadrat berikut untuk :
18
yang mana bisa diselesaikan dengan rumus kuadratik. Kemudian tiga kasus langsung muncul: (i) akar real yang berbeda, (ii) akar kompleks, (iii) akar berulang. Pembaca biasanya sudah terbiasa menemui situasi yang sama ketika menyelesaikan persamaan diferensial biasa homogen linear orde kedua dengan koefisien konstan. Sesungguhnya, ini memungkinkan untuk langsung membentuk persamaan Cauchy-Euler menjadi persamaan dengan koefisien konstan.
Ide untuk mengubah variabel adalah aturan pangkat ansatz mengganti di mana-mana dengan nilai mutlaknya.
19 koefisien konstan, dan dengan , persamaan karakteristik untuk diberikan dengan (2.2.3).
Akar Real yang Berbeda
Kasus paling sederhana tidak memerlukan perubahan. Jika
,
maka dengan akar real dari (2.2.3), penyelesaian umumnya adalah
20
Akar Kompleks
Jika , kita dapat menulis akar kompleks dari (2.2.3) sebagai
Ingat kembali penyelesaian umum untuk diberikan dengan
Dan atas perubahan, dan mengganti dengan | |,
| | ( | | | | )
Akar Berulang
Jika , ada satu akar real dari persamaan (2.2.3). Penyelesaian umumnya untuk adalah
Hasilnya
| | | |
Kita sekarang memberikan contoh ilustrasi ketiga kasus ini.
Contoh 3: Selesaikan untuk Dengan kondisi dua titik batas dan .
Karena , kita mencoba dan mendapatkan persamaan karakteristik
21
Karena persamaan karakteristik mempunyai dua akar real, penyelesaian umumnya diberikan dengan
Kita sekarang menjumpai kondisi dua titik batas untuk pertama kalinya, yang mana dapat digunakan untuk menentukan koefisien dan . Karena , kita harus mempunyai . Diterapkan pada kondisi yang ada , kita mendapatkan penyelesaian tunggal
√
Perhatikan bahwa disebut titik singular dari persamaan diferensial biasa karena penyelesaian umumnya adalah singular pada ketika . Kondisi batas kita menyebabkan adalah berhingga pada menghilangkan penyelesaian singular. Namun, tetap singular pada . Inilah mengapa kita menggunakan kondisi dua titik batas dari pada menentukan nilai dari .
Contoh 4: Temukan penyelesaian umum dari dengan
kondisi dua titik batas dan √ .
Dengan ansatz , kita mendapatkan
22
Sehingga . Oleh karena itu, dengan kita mempunyai , dan penyelesaian umum untuk adalah
Kondisi batas yang pertama hasilnya . Kondisi batas yang kedua
√ hasilnya .
Contoh 5: Temukan penyelesaian umum dari dengan kondisi dua titik batas dan .
Dengan ansatz , kita mendapatkan
Jadi ada akar yang berulang . Dengan , kita mempunyai , sehingga penyelesaian umumnya adalah
Kondisi batas pertama hasilnya . Kondisi batas keduanya
hasilnya . Penyelesaiannya adalah
23
C. Kecepatan Individu Dan Medan Kecepatan
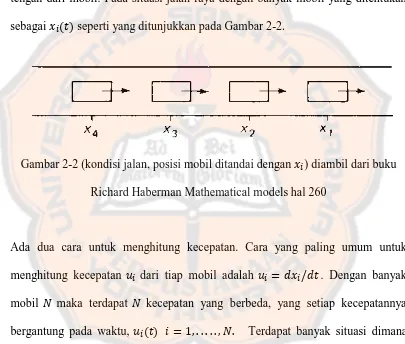
Mari bayangkan sebuah mobil bergerak sepanjang jalan tol. Jika posisi dari mobil ditentukan sebagai , maka kecepatannya pasti dan percepatannya adalah . Posisi dari mobil ditentukan pada tengah-tengah dari mobil. Pada situasi jalan raya dengan banyak mobil yang ditentukan sebagai seperti yang ditunjukkan pada Gambar 2-2.
Gambar 2-2 (kondisi jalan, posisi mobil ditandai dengan ) diambil dari buku Richard Haberman Mathematical models hal 260
24
mobil pada tempat itu). Pertanyaan ini akan disampaikan dalam bentuk matematika, medan kecepatan pada mobil yang berada pada pasti adalah kecepatan mobil ,
(2.3.1)
Keberadaan dari medan kecepatan menunjukkan bahwa pada setiap dan ada . Jadi model ini mobil satu tidak diperbolehkan untuk melewati satu sama lain (karena pada titik di saat akan melewati maka pasti akan muncul dua kecepatan yang berbeda).
Sebagai contoh perhatikan dua mobil pada jalan tol, yang diberi tanda mobil 1 dan mobil 2, seperti yang ditunjukkan pada Gambar 2-3. Andaikan mobil 1 bergerak pada kecepatan mil/jam dan mobil 2 pada kecepatan mil/jam. Juga asumsikan bahwa mobil 1 berada pada pada , sementara mobil 2 berada pada pada . Jadi
25
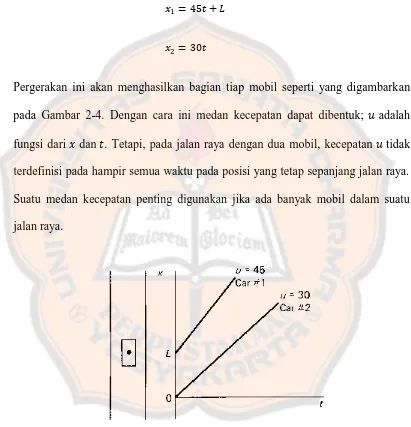
Mengintegralkan persamaan ini akan menghasilkan posisi setiap mobil sebagai fungsi dari waktu;
Pergerakan ini akan menghasilkan bagian tiap mobil seperti yang digambarkan pada Gambar 2-4. Dengan cara ini medan kecepatan dapat dibentuk; adalah fungsi dari dan . Tetapi, pada jalan raya dengan dua mobil, kecepatan tidak terdefinisi pada hampir semua waktu pada posisi yang tetap sepanjang jalan raya. Suatu medan kecepatan penting digunakan jika ada banyak mobil dalam suatu jalan raya.
Gambar 2-4 (Kondisi jalan yang digambarkan secara vertical) diambil dari buku Richard Haberman Mathematical models hal 261
Andaikan bahwa medan kecepatan yang kontinu terdefinisi di manapun (untuk
26
(2.3.2)
Perhatikan bahwa ketika , maka dari persamaan (2.3.2) , dan ketika , maka . Terdapat banyak medan kecepatan yang memiliki sifat seperti ini. Sebagai model yang sederhana, asumsikan bahwa ada tak berhingga banyak mobil yang setiap mobil ditandai dengan angka . Misalkan
berkorespondensi dengan mobil pertama yang berada di kiri dan
berkorespondensi dengan mobil pertama yang berada di kanan. Jika mobil yang ditandai dengan bergerak pada kecepatan , , dan
berada pada posisi , maka kecepatan mobil sebagai yang
27
Gambar 2-5 (Posisi mobil dengan kecepatan yang berbeda) diambil dari buku Richard Haberman Mathematical models hal 262
Berdasarkan pada aplikasi lalu lintas tertentu, perlu diperhatikan medan kecepatan atau kecepatan dari mobil secara individu. Kecepatan dari mobil sama dengan
Kedua konsep dari kecepatan tersebut digunakan dalam mendiskusikan aliran lalu lintas.
D. Aliran Lalu lintas dan Kepadatan Lalu lintas
28
Jalan sehingga dapat menghitung jumlah mobil yang melewati posisi tersebut pada waktu tertentu. Pengamat dapat menghitung rata-rata jumlah mobil yang lewat tiap jam. Jumlah ini disebut sebagai aliran lalu lintas yang dilambangkan dengan . Andaikan penghitungan berikutnya diambil pada suatu tempat dalam interval setengah jam:
Gambar 2-6 (Data banyaknya mobil yang lewat pada suatu waktu) data diambil dari buku Richard Haberman Mathematical models hal 265
29
Gambar 2-7 (Aliran lalu lintas sebagai fungsi waktu) diambil dari buku Richard Haberman Mathematical models hal 265
30
Pada penghitungan ini, catat bahwa aliran yang dihitung berfluktuasi liar seperti fungsi pada waktu. Untuk menyelesaikan permasalahan ini, kita asumsikan bahwa ada penghitungan interval seperti:
1. Interval cukup panjang sehingga banyak mobil yang melewati pengamat dalam interval penghitungan ( menghilangkan fluktuasi liar);
2. Interval cukup pendek sehingga variasi dalam aliran lalu lintas tidak mulus rata-ratanya untuk periode waktu yang panjang.
31
Gambar 2-8 (Aliran lalu lintas sebagai fungsi kontinudari waktu) diambil dari buku Richard Haberman Mathematical models hal 266
Penghitungan lalu lintas standar lainnya terjadi pada waktu yang tetap. Jumlah mobilyang berada di antara dua titik dapat dihitung, sebagai contoh, dengan menggunakan foto; seperti yang digambarkan pada Gambar 2-9. Prosedur sistematik yang digunakan tidak dapat menentukan secara pasti mobil itu berada pada daerah yang mana pada suatu waktu yang tetap. Dalam menentukan letak mobil sebaiknya menggunakan estimasi dari potongan mobil atau diasumsikan mobil dapat dihitung hanya jika tengah mobil berada pada daerah tersebut. Penghitungan ini yakni jumlah mobil pada suatu panjang jalan yang diberikan, yang dapat dikonversi menjadi jumlah mobil per mil, jumlahnya disebut kepadatan dari mobil dan diberi lambang . Di sini semua kendaraan diperlakukan sama, kata “mobil” digunakan untuk menampilkan kendaraan apapun.
Jika kepadatan lalu lintas dihitung setiap mil dari jalan pada waktu yang
32
Gambar 2-9 (Kepadatan lalu lintas sama dengan invers dari jarak) diambil dari buku Richard Haberman Mathematical models hal 266
Sebagai contoh lain, bayangkan sebuah situasi di mana mobil berjarak sama. Untuk kenyamanan sekarang diasumsikan bahwa semua kendaraan mempunyai panjang yang sama, . Untuk menggunakan satu unit panjang dalam masalah lalu lintas, dihitung dalam kilometer dan bukan meter. Jika jarak antar mobil adalah ( jarak disebut ruang), seperti yang diilustrasikan pada Gambar 2-10, maka kepadatannya, jumlah mobil per kilometer adalah
ρ =
. (2.4.1)
33
Seperti aliran lalu lintas, ada kesulitan dengan kepadatan lalu lintas jika penghitungan dibuat pada interval yang terlalu pendek. Andaikan jarak yang
digunakan untuk penghitungan kepadatan sangatlah pendek
kilometer ; maka situasi lalu lintas yang masuk akal digambarkan pada Gambar 2-11. Penghitungan data (menggunakan perkiraan potongan mobil) menjadi:
Gambar 2-11 (Penghitungan data menggunakan potongan mobil) diambil dari buku Richard Haberman Mathematical models hal 268
34
Gambar 2-12 (Kepadatan lalu lintas sebagai fungsi posisi) diambil dari buku Richard Haberman Mathematical models hal 268
Jika kita berharap untuk memperkirakan kepadatan sebagai fungsi kontinu dari , kita mendapat Gambar 2-13 dan kepadatannya harus dihitung sepanjang interval yang jaraknya tidak terlalu pendek dan tidak terlalu panjang. Jika jarak penghitungannya terlalu panjang, maka rata-rata kepadatannya yang dihitung tidak tepat untuk diambil sebagai variasi kepadatan. Di sisi lain, jika jarak penghitungan terlalu kecil, maka variabel panjang dari data lalu lintas terlalu halus. Jarak penghitungan harus cukup panjang untuk banyak mobil yang termasuk di dalamnya, tapi cukup pendek sehingga variasi kepadatannya dapat dihitung.
35
Mari kita mengilustrasikan dengan contoh signifikan dari interval
penghitungan. Anggap
mil dari bagian jalan, ke depannya akan dibagi menjadi seratus interval yang lebih kecil dengan panjang yang sama, dengan batas dari sampai . Andaikan sebuah foto diambil dan dari situ kita menentukan bahwa mobil berada pada posisi berikut:
1.0,3.1,6.1,9.4,12.7,14.1,15.2,16.9,18.9,20.1,21.5,23.5,
25.8,28.9,31.3,34.8,37.0,40.1,43.4,44.9,46.4,47.9,49.6,
51.6,53.3,54.8,56.6,58.3,59.6,60.6,61.9,62.9,63.7,65.0,
66.6,69.5,72.1,76.3,78.8,81.6,84.2,87.7,90.8,95.1,99.3.
Setiap mobil diilustrasikan dalam Gambar 2-14 sabagai “dot”.
Gambar 2-14 (Diagram jarak-jarak mobil) Gambar diambil dari buku Richard Haberman Mathematical models hal 269
Dari data atau diagram kita melihat bahwa dekat dengan tanda mobil
diperkirakan terpisah interval. Sepanjang jalan mobil menyebar ke sekitar
unit terpisah (dekat tanda ) sebelum menjadi dekat kembali antara tanda
dan (jarak terpisah menjadi sekitar unit terpisah). Kita akan
36
lebih besar dari pada unit terpisah dan oleh karena itu kepadatan lalu lintasnya
kurang dari 1 mobil tiap unit panjang. Kepadatan lalu lintas kurang dari
mobil tiap mil, karena tiap tanda adalah
dari dari suatu mil. Untuk lebih jelasnya mari kita melihat bagaimana menghitung kepadatan pada tanda ke- bergantung pada interval penghitungan. Jika kita menggunakan panjang suatu jalan dari unit dipusatkan sekitar tanda ke- , maka kepadatan pada ditetapkan menjadi jumlah mobil antara dan dibagi dengan panjang . Dengan dasar ini kita dapat membuat bagan penghitungan kepadatan:
37
mobil per mil. Untuk interval penghitungan yang pendek, akan terjadi fluktuasi yang kasar. Dengan meningkat, akhirnya mobil ditemukan dan rata-rata kepadatan meningkat secara dramaatis. Kepadatannya lalu berkurang secara bertahap (dengan meningkatnya) kembali hingga mobil selanjutnya ditemukan. Amplitudo dari fluktuasi berkurang dengan interval penghitungan yang semakin panjang. Untuk jarak penghitungan yang sangat panjang.
38
Aliran sama dengan kepadatan dikali kecepatan
Pada bagian sebelumnya kita mendiskusikan tiga variabel dasar lalu lintas: kecepatan, kepadatan, aliran. Kita akan menunjukkan bahwa ada hubungan yang dekat antara tiga variabel tersebut. Pertama-tama kita perhatikan satu dari kemungkinan paling sederhana dari situasi lalu lintas. Andaikan pada jalan yang sama, lalu lintas bergerak dengan kecepatan konstan dengan kepadatan konstan , seperti yang ditunjukkan pada Gambar 2-16. Karena setiap mobil bergerak pada kecepatan yang sama, jarak antara mobil masih konstan.
Gambar 2-16 (Pergerakan mobil dari pengamat) diambil dari buku Richard Haberman Mathematical models hal 273
39
Gambar 2-17 (Banyaknya mobil yang melalu pengamat dalam jam) diambil dari buku Richard Haberman Mathematical models hal 273
maka adalah jumlah mobil yang melalui pengamat dalam jam. Jadi jumlah mobil per jam yang kita miliki disebut aliran lalu lintas, adalah
Meskipun ini telah diturunkan dari kasus yang telah disederhanakan, kita akan menunjukkan bahwa ini adalah hukum dasar. Aliran lalu lintas=(kepadatan lalu lintas)(medan kecepatan). Jika variabel lalu lintas bergantung pada dan sebagai contoh , lalu kita masih menujukkan bahwa
(2.4.2)
Langkah yang mudah untuk menunjukkan ini adalah untuk memperhatikan jumlah mobil yang melalui dalam waktu yang sangat kecil, sebagai contoh antara dan . Dalam waktu yang kecil mobil tidak dapat berjalan jauh dan karenanya (jika dan adalah fungsi kontinu dari dan ) dan
dapat diperkirakan sebagai konstan, nilai mereka pada dan .
Dalam waktu kecil , mobil yang menempati ruang yang kecil, kira-kira
, akan melalui pengamat, seperti yang ditunjukkan pada Gambar 2-18.
40
diberikan pada persamaan (2.4.2). Jadi hasil untuk konstan dan tidak memerlukan modifikasi untuk dan yang tak seragam. Karenanya, tiga variabel dasar lalu lintas, kepadatan , kecepatan dan aliran
, terhubung dalam persamaan (2.4.2).
Gambar 2-18 (Dalam waktu yang kecil mobil akan melalu pengamat) diambil dari buku Richard Haberman Mathematical models hal 274
E. Konservasi Jumlah Mobil
Pada bagian ini, kita akan memformulasikan model deterministik dari aliran lalu lintas. Andaikan bahwa densitas dan medan kecepatan diketahui untuk suatu aliran lalu lintas yang tak terhingga panjangnya. Dapatkah kita memprediksi densitas dan kecepatan pada masa depan? Sebagai contoh jika lampu hijau menjadi merah dan sesaat kemudian menjadi hijau, lalu apakah pola lalu lintasnya dapat diprediksi?
Kita dapat menganggap variabel dasar lalu lintas adalah dan
. Tetapi andaikan kita tahu kepadatan lalu lintasnya adalah dan
41
dengan
Menyelesaikan persamaan ini dapat menentukan di mana posisi mobil-mobil beberapa saat kemudian. Pada beberapa waktu kemudian, kita dapat menghitung densitas. Jadi kepadatan lalu lintas masa depan dapat dihitung dengan mengetahui kecepatan lalu lintas. (meskipun dalam penghitungan tidaklah sederhana dan harus menggunakan komputer).
Kita ingin menentukan bagaimana densitas dapat dihitung dengan mudah dengan mengetahui kecepatannya (nantinya kita akan menyelesaikan di mana kecepatannya juga tidak diketahui). Dengan mengikuti mobil, kita menganggap jumlahnya tidak berubah. Tetapi kita telah dikenalkan dengan variabel lalu lintas berupa densitas, kecepatan dan aliran, jadi kita tidak harus mengikuti mobil satu per satu. Mari kita mencoba untuk „mengawetkan‟ mobil dengan menggunakan variabel pada lalu lintas.
Pada beberapa interval jalan antara dan , jumlah mobil
adalah integral dari kepadatan lalu lintas:
∫ (2.5.1)
Jika tidak ada tempat masuk dan keluar pada jalan ini,maka jumlah mobil antara
dan masih bisa berubah dalam waktu. Jumlahnya berkurang saat
42 mengembangkan turunan yang terakhir dengan mengeliminasi yang diperlukan dengan menggunakan perkiraan. Perhatikan perbedaan antara jumlah mobil pada
dan . Persamaan pasti diperlukan untuk jumlah mobil yang melewati
antara dan . Karena adalah jumlah mobil yang
melewati tiap waktu tertentu, maka ∫ adalah jumlah mobil yang
melewati antara dan . Pada turunan, , dekat dengan
43
∫ -∫ = ∫
Bagi persamaan ini dengan dan ambil limit dari terhadap . Ambil turunan ke . Karena tidak bergantung pada , kita mendapatkan
∫
Dari teorema dasar kalkulus akan menunjukkan bahwa,
Karena , dapat berada pada sembarang waktu, diganti dengan notasi , jadi persamaan (2.5.2) diturunkan kembali.
Menggabungkan persamaan (2.5.1) dan (2.5.2), hasilnya
∫ – (2.5.3)
44
Sebagai contoh, perhatikan jalan layang yang sangat panjang di mana kita memodelkan sebagai jalan yang tak terhingga panjangnya. Mari kita asumsikan bahwa aliran mobil menuju ke nol dengan menuju ,
Yang menyatakan bahwa jumlah mobilnya konstan sepanjang waktu. Konstan bisa dievaluasi jika salah satu jumlah dari mobil atau densitas yang diketahui:
∫ ∫
Hukum konservasi integral akan disebut sebagai hukum konservasi lokal, yang valid pada setiap posisi di jalan. Kita akan melakukannya pada 3 cara yang ekuivalen. Pada 3 cara itu, titik akhir pada bagian jalan, dan dianggap sebagai variabel tak bebas tambahan. Jadi turunan terhadap waktu harus diganti dengan turunan parsial,
∫ (2.5.4a)
Karena turunan persamaan (2.5.3) asumsikan bahwa posisi dan
adalah tetap dalam waktu. Pada sisi lain
45
dengan waktu. Pada turunan pertama, kita menginvestigasi bagian kecil pada jalan. Pendekatan kasar telah dibuat, di mana memberikan hasil yang tepat. Setelah itu persamaan pertama akan ditingkatkan turunannya.
(1) Perhatikan integral konservasi dari mobil pada interval kecil dari suatu jalan layang dari ke . Jadi dari persamaan (2.5.4a),
Pada turunan subsekuennya, (2), kita menunjukkan bahwa errornya hilang karena ,
46
Jadi sisi kiri dari persamaan (2.5.4b) sama dengan –(
.
47
yang datang maupun pergi tanpa melalui batas. Ini valid di manapun (semua ) dan untuk sepanjang waktu. Ini disebut persamaan konservasi mobil.
(2) Persamaan konservasi mobil dapat diturunkan lebih jauh. Perhatikan hukum konservasi integral, persamaan (2.5.4a), untuk sembarang bagian berhingga dari suatu jalan, . Sekarang ambil turunan parsial terhadap .
48
integral. Satu-satunya fungsi yang integralnya adalah nol untuk setiap interval adalah fungsi nol. Jadi persamaan (2.5.5) mengikuti.
Dengan tiga metode yang ekuivalen, kita telah menunjukkan bahwa
(2.5.7)
Ini pasti valid jika tidak ada jalan masuk ataupun keluar di antara jalan tersebut. Persamaan (2.5.7) valid dalam banyak situasi tapi tidak melakukan apa-apa terhadap lalu lintas. Secara umum, jika adalah sembarang jumlah lokal yang dipadatkan dan jika adalah aliran dari jumlah yang melaluli batasan, maka dapat ditunjukkan menggunakan argumen yang sama yang telah kita kembangkan, bahwa persamaan (2.5.7) valid. Tetapi untuk masalah lalu lintas, kita tahu dari
Persamaan diferensial parsial ini menghubungkan kepadatan lalu lintas dan kecepatan.
F. Hubungan kecepatan dan kepadatan
Dua variabel, kepadatan lalu lintas dan kecepatan mobil hanya
49
(2.6.1)
Jika medan kecepatan diketahui, persamaan (2.6.1) berkurang menjadi persamaan diferensial parsial untuk kepadatan lalu lintas yang tidak diketahui. Dalam kasus ini, persamaan (2.6.1) dapat digunakan untuk memprediksi kepadatan lalu lintas di masa depan jika kepadatan lalu lintas awalnya diketahui. Sebagai masalah nilai awal, persamaan (2.6.1) hanyalah sama dengan persamaan diferensial biasa untuk posisi dari suatu massa atau persamaan diferensial biasa yang dikembangkan dalam dinamika populasi. Kita dapat mengikuti untuk menyelesaikan persamaan diferensial parsial ini. Tetapi, ini menjadi tidak berarti karena kita tidak tahu medan kecepatannya.
Medan kecepatan yang tidak diketahui harus diinvestigasi. Perhatikan mobil sebagai partikel, kita perlu tahu kecepatan partikelnya. Jika ini adalah sistem mekanik, maka kita akan menginvestigasi kekuatan di dalam sistem dan menggunakan hukum Newton untuk mempelajari pergerakan dari partikel. Tetapi, tidak ada cara yang sama dengan hukum Newton mengenai mobil yang harus bergerak. Ini bukanlah kekuatan yang menyebabkan mobil tersebut bergerak; ini adalah keputusan dari setiap individu pengendara. Apa faktor yang mempengaruhi kecepatan individual mobil?
50
sangat familiar denganmu. Jika lalu lintas cukup renggang, maka pengendara dari tiap mobil memiliki kebebasan untuk melakukan segala sesuatu sesuai dengan yang dia inginkan dalam batasan-batasan tertentu. Satu-satunya alasan yang membuat pengendara memperlambat kendaraannya karena kehadiran dari kendaraan lain. Dengan lalu lintas yang semakin padat maka pertemuan dengan mobil yang bergerak lambat akan semakin sering. Dalam kondisi ini tidaklah sulit untuk melewati mobil yang bergerak lambat, dan oleh karena itu kecepatan rata-rata pengendara masih tidak kurang dari kecepatan yang diinginkan. Tetapi, pada lalu lintas yang padat, berganti baris menjadi susah, dan menyebabkan rata-rata kecepatan dari lalu lintas berkurang.
Dengan dasar dari tipe pengamatan ini, kita menyederhanakan asumsi dasar bahwa tiap titik sepanjang jalan kecepatan dari sebuah mobil hanya bergantung pada kepadatan lalu lintas,
(2.6.2)
Lighthill dan Whitham dan Richard pada pertengahan 1950 telah menyatakan model matematika aliran lalu lintas tipe ini secara terpisah.
Jika tidak ada mobil lain pada jalan raya (berkorespondensi dengan kepadatan lalu lintas yang sangat rendah), maka mobil dapat bergerak pada kecepatan maksimum ,
(2.6.3)
51
Tetapi, dengan meningkatnya kepadatan (yang berarti semakin banyaknya mobil per mil) maka keberadaan mobil lain akan membuat kecepatan mobil berkurang. Dengan meningkatnya kepadatan maka kecepatan dari mobil akan terus berkurang hingga akhirnya menghilang atau berhenti, dan jadi
(2.6.4)
Pada kepadatan tertentu di mana mobil tetap pada tempatnya atau tidak bergerak. Kepadatan maksimum ini, biasanya berkorespondensi dengan apa yang disebut lalu lintas bumper to bumper,
(2.6.5)
(Mobil diamati saat datang dan saat berhenti pada kepadatan lalu lintas sebelum mobil menyentuh mobil lainnya. Jadi , di mana adalah rata-rata panjang dari kendaraan).
G. Aliran lalu lintas
Seorang insinyur lalu lintas akan diminta mekanisme kontrol lalu lintas untuk memaksimalkan aliran pada suatu jalan. Aliran yang terbesar akan terjadi jika mobil saling berdekatan ( bergerak pada batas kecepatan
. Ini jelas tidak aman, tetapi lebih jauh lagi kita mempunyai hipotesis
52
Kita akan mengasumsikan bahwa kondisi jalan adalah sama. Yang artinya semua mobil memiliki keadaan yang sama, misalnya kecepatan mobil bergantung pada kepadatan lalu lintas dan tidak pada waktu atau posisi selama di jalan. Karena aliran lalu lintas (jumlah mobil per jam) sama dengan kepadatan dikalikan dengan kecepatan, aliran juga hanya bergantung pada kepadatan,
(2.7.1)
Aliran jadi memiliki sifat-sifat umum. Aliran mungkin nol dalam dua jalan yang pasti:
1. Jika tidak ada lalu lintas ( ), atau
2. Jika lalu lintas tidak bergerak ( dan
Untuk nilai dari kepadatan lainnya aliran lalu lintas pasti positif. Hubungan antara aliran dan densitas biasanya disebut Diagram Dasar
Lalu lintas Jalan. Ini menunjukkan bahwa maksimum dari aliran lalu lintas
53
Gambar 2-19 (Hubungan aliran dan kepadatan) diambil dari buku Richard Haberman Mathematical models hal 290
Dengan kata lain kita mengasumsikan bahwa ⁄ berkurang di mana meningkat, seperti yang didemonstrasikan dalam Gambar 2-20. Maksimum absolut dari aliran terjadi hanya pada maksimum lokal.
Gambar 2-20 (Aliran yang terjadi pada maksimum local) diambil dari buku Richard Haberman Mathematical models hal 290
54
Data dari Merrit Parkway. Gambar 2-20 meyakinkan rentang kecepatan di mana maksimum yang terjadi tidak dapat diobservasi.
Gambar 2-21 (Rentang kecepatan di mana maksimum yang terjadi tidak dapat diobservasi) diambil dari buku Richard Haberman Mathematical models hal 291
55
terowongan yang lebih tua. Ini mengindikasikan bahwa terowongan yang lebih baru, dengan luas bidang yang lebih besar, penerangan yang telah dikembangkan dan lain-lain, membuat pengendara dapat berkendara lebih cepat pada kepadatan lalu lintas yang sama.
Sebagai tambahan, pengukuran aliran kepadatan telah dibuat dalam bagian yang berbeda pada terowongan yang sama. Pengalaman ini menunjukkan bahwa kapasitas pada suatu jalan itu bervariasi. Ada tempat di mana kapasitasnya lebih kecil dari yang lainnya, yang biasa disebut kemacetan.
56
BAB III
MODEL-MODEL ALIRAN LALU LINTAS
A. Steady State Car following model
Pada bagian ini kita akan menunjukkan suatu metode untuk menentukan hubungan kecepatan dan kepadatan. Untuk menjelaskan kurva kecepatan kepadatan, kita dapat menganalisa secara hati-hati mengenai cara pengendara dalam membuat pilihan saat berkendara. Model matematika yang diberikan di sini berasal dari hasil beberapa penelitian untuk membangun model tersebut.
57
kita memberi beberapa waktu penundaan sebelum pengendara bereaksi untuk mengubah kecepatan relatif. Proses ini dimodelkan dengan menspesifikasikan percepatan pada beberapa waktu sesudahnya,
Di mana adalah waktu bereaksi. Secara matematik, persamaan ini menampilkan suatu sistem dari persamaan diferensial biasa dengan suatu penundaan, yang disebut sistem persamaan diferensial penundaan.
Mengintegralkan persamaan (3.1.2), yakni
( )
Sebuah persamaan yang menghubungkan kecepatan dari mobil pada suatu waktu dengan jarak antar mobil. Bayangkan suatu situasi steady state di mana semua mobil terpisah jarak dan bergerak pada kecepatan yang sama. Jadi
58
Adalah definisi yang beralasan dari kepadatan lalu lintas, diperoleh hubungan antara kepadatan dan kecepatan.
Kita memilih bilangan konstan , yang mana pada kepadatan maksimum . dengan kata lain,
Dengan cara ini hubungan antara kepadatan dan kecepatan dapat diturunkan,
(
) (3.1.4)
Gambar 3-1 (Situasi steady state, hubungan kecepatan dan kepadatan) diambil dari buku Richard Haberman Mathematical models hal 294
59
besar, sebagai contoh, mendekati . Tetapi ini memprediksikan kecepatan tak berhingga pada kepadatan nol.
Kita dapat mengeliminasi masalah ini, dengan memperhatikan bahwa model ini tidak cocok untuk kepadatan kecil karena alasan berikut. Pada kepadatan kecil, perubahan kecepatan dari mobil tidak ada karena mobil di depannya. Namun itu lebih seperti pengaruh batas kecepatan dari mobil (dan percepatan) pada kepadatan yang kecil. Jadi kita dapat berhipotesis bahwa persamaan (3.1.4) valid hanya untuk kepadatan yang besar. Untuk kepadatan yang kecil, mungkin hanya terbatas dengan batas kecepatan, . Jadi
{
(
)
Kita memilih kepadatan kritis seperti kecepatan kepadatan dari fungsi kontinu, seperti yang ditunjukkan dalam Gambar. Aliran jadi
{ (
)
60
Gambar 3-2 (Situasi steady state) diambil dari buku Richard Haberman Mathematical models hal 295
Bayangkan dua pengendara yang keduanya mengendarai dengan kecepatan km.p.h lebih cepat dari mobil yang ada di depannya, yang satu meter di belakang tetapi yang lain hanya 8 meter di belakangnya. Kita tahu bahwa pengendara akan mengalami perlambatan yang berbeda-beda. Percepatan dan perlambatan seorang pengendara juga bergantung pada jarak dengan mobil sebelumnya. Semakin dekat pengendara, semakin sering pengendara akan merespon lebih kuat untuk memperhatikan kecepatan relatif. Cara paling sederhana untuk model ini adalah dengan menginverskan proporsional dari sensitifitas pada jarak
61
Persamaan ini dapat diintegralkan menjadi
| |
Mari kita memperhatikan situasi steady state, dalam kasus
62
B. Model Persamaan Diferensial Parsial
Untuk suatu bagian dari jalan, percobaan dapat digunakan untuk menganalisa ketergantungan kepadatan terhadap kecepatan. Jika kita mengasumsikan bahwa kecepatan pengendara diketahui dengan fungsi , ditentukan dengan , maka konservasi pada mobil persamaan (2.5.8) menjadi
( )
Ini adalah persamaan diferensial parsial dengan satu variabel yang tidak diketahui.
Andaikan ada aliran kepadatan awal yang tidak konstan, seperti yang ditunjukkan pada Gambar 3-3.
Gambar 3-3 (Gerakan mobil dengan kecepatan yang berbeda) diambil dari buku Richard Haberman Mathematical models hal 298
Mobil lain akan bergerak dengan kecepatan yang berbeda. Jadi kepadatan akan berubah segera dan di bawah asumsi kita, pengendara akan segera menyesuaikan kecepatan mereka. Proses ini akan berlanjut. Jika kita tertarik dengan kepadatan mobil pada waktu berikutnya, kita „hanya‟ perlu untuk menyelesaikan persamaan
63
Masalah lalu lintas telah diformulasikan dalam kondisi suatu persamaan diferensial parsial, persamaan (3.2.1), atau
Karena , dapat dianggap sebagai suatu fungsi dari saja. Persamaan terakhir ini lebih mudah digunakan karena aturan rantai
Satu kondisi yang cocok dalam urusan untuk menyelesaikan persamaan diferensial parsial yang tunggal adalah kondisi awal. Dengan suatu urutan th
persamaan diferensial umum, kondisi awal diperlukan. Banyaknya kondisi bersesuaian sama untuk persamaan diferensial parsial. Jadi untuk persamaan (3.2.3) hanya satu kondisi awal yang diperlukan karena persamaan diferensial parsial hanya mengandung satu kali turunan. Tetapi, ada beberapa perbedaan utama antara persamaan diferensial biasa dan parsial yang disebabkan oleh tambahan variabel independen.
Untuk mengilustrasikan perbedaan ini, mari kita perhatikan tiga persamaan diferensial parsial yang sangat sederhana ini:
(1)
64 (2)
(3)
Ini disebut persamaan diferensial parsial karena diasumsikan bergantung pada dan . Jika hanya bergantung pada , maka dua persamaan yang pertama akan menjadi persamaan diferensial biasa, penyelesaian umumnya menjadi:
(1)
(2)
Untuk mempunyai penyelesaian tunggal, satu kondisi awal diperlukan, sebagai contoh, jika , maka
(1)
(2)
65 Jadi
adalah penyelesaian umum dari ⁄ , di mana adalah sembarang fungsi dari . Untuk memeriksa, disubstitusikan ke dalam persamaan diferensial parsial, ⁄ , di mana kita secara cepat dapat memastikan bahwa
adalah penyelesaiannya. Untuk menentukan fungsi sembarang, satu
kondisi awal diperlukan. Kondisi awalnya adalah nilai awal dari , kepadatan lalu lintas awal . Dapatkah persamaan diferensial parsial diselesaikan untuk sembarang kondisi awal, untuk diresepkan,
? Dapatkah fungsi sembarang, , ditentukan dengan
? Dalam kasus ini cukup sederhana seperti . Jadi
Menyelesaikan persamaan diferensial parsial dan juga kondisi awal.
Kita sekarang memperhatikan contoh (2),
Kita akan meyakini kondisi awal . Persamaan diferensial parsial dapat diintegralkan kembali (untuk setiap tetap) menjadi
66
Kondisi awalnya memenuhi jika , dan oleh karena itu penyelesaian dari masalah (2) memenuhi kondisi awal yang diberikan adalah
[ ]
Sebagai contoh (3),
Menjaga tetap menghasilkan penyelesaian dari persamaan diferensial biasa,
Untuk nilai lain dari , konstannya dapat bervariasi, dan oleh karena itu penyelesaian dari persamaan diferensial parsialnya adalah
.
Kondisi awal, , dipenuhi jika , hasil dari pernyelesaian masalah nilai awal,
67
C. Interpretasi mengenai gelombang lalu lintas
Pada bagian ini dengan cara alternatif, kita mendapat penyelesaian ke persamaan diferensial parsial untuk gangguan kepadatan lalu lintas,
(3.3.1)
68
Jadi konstan. Seorang pengamat bergerak dengan kecepatan spesial maka pengukurannya tidak merubah kepadatan. Kita juga akan menemukan konsep yang berguna untuk pembelajaran kita pada persamaan aliran lalu lintas nonlinear,
Dengan mengintegralkan persamaan (3.3.3), penyelesaian aljabar mudah didapatkan. Dari persamaan (3.3.3), sepanjang , di mana dan adalah konstan. Tetapi, kita melihat bahwa adalah konstan hanya jika
adalah konstan, untuk garis lurus yang berbeda, dapat menjadi bilangan
konstan yang berbeda. Jadi konstan bergantung pada konstan , ; adalah fungsi sembarang untuk , atau
(3.3.4)
69
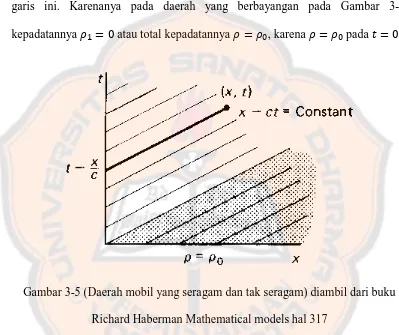
D. Sebuah contoh aliran lalu lintas yang hampir seragam
Pada bagian ini jenis lain dari masalah lalu lintas yang melibatkan suatu kepadatan lalu lintas yang hampir seragam akan diselesaikan. Andaikan awal kedapatan lalu lintas adalah konstan untuk jalan tol yang hampir tak terbatas . Berapa banyak mobil tiap jam yang harus masuk dalam urutan untuk aliran lalu lintas agar tetap seragam? Aliran lalu lintas pada jalan masuk harus , aliran bersesuaian dengan kepadatan seragam . Untuk membuktikan pernyataan ini, perhatikan interval dari jalan antara jalan masuk dan titik . Menggunakan integral konservasi dari mobil,
∫
Karena kepadatan lalu lintas ditetapkan untuk menjadi konstan, sisi kirinya adalah nol. Jadi aliran pada pasti sama dengan aliran di jalan masuk
Tetapi aliran pada adalah . Jadi .
Dengan kata lain, aliran yang masuk harus sama dengan aliran yang keluar, sehingga jumlah mobil di antaranya akan tetap sama dengan mengasumsikan kepadatan konstan.
Tetapi, andaikan bahwa aliran dalam dari mobil adalah berbeda dari aliran untuk kepadatan seragam,
(3.4.1)