Pengamatan Sikap Terbang Roket
Electric Duct Fan
Secara
Autonomous
Kamarudin
1*, Eko Prasetio
11
Politeknik Negeri Batam, Jurusan TekniK Elektro, Batam *E-mail: [email protected]
Received: 17-04-2020 Accepted: 30-04-2020 Published: 30-04-2020
Abstrak
Roket merupakan salah satu teknologi dibidang pertahanan yang terus dikembangkan hingga saat ini. Negara yang mampu menguasai teknologi roket akan disegani oleh negara lain yang ada didunia. Selain digunakan untuk sistem alusista, sebuah roket juga digunakan untuk meluncurkan berbagai macam satelit yang dibutuhkan oleh manusia misalnya satelit komunikasi, cuaca, dan lain-lain. Roket didesain mirip peluru dilengkapi sayap dengan rasio ukuran lebar bentang sisi kiri sayap kesisi kanan sayap tidak lebih dari setengah panjang badan roket. Fungsi dari sayap untuk dapat menjaga posisi dari sudut elevasi yang dapat dikontrol secara autonomous berdasarkan perubahan data sudut dari sensor. Roket ini dilengkapi dengan sistem telemetri, dimana roket akan mengirim informasi dari wahana ke groundsegment ditampilkan kedalam GUI (Graphic User Interface)secara real-time berupa data-data berupa ketinggian, elevasi, arah, dan data hasil pergerakan roket. Hasil pengujian 1 menunjukkan persentase rata-rata roket untuk tetap berada pada sudut elevasi sekitar 3,98%. Pengujian 2 sekitar 17,86% dan pengujian 3 sekitar 29,30%. Kecepatan rata-rata error roket untuk mencapai puncak sebesar 24,7 m/s. Perbedaan data persentase roket untuk berada pada posisi sudut elevasi dipengaruhi oleh perubahan kecepatan angin yang tidak stabil pada saat dilakukannya percobaan peluncuran.
Kata kunci: Motor EDF, Autonomous, Roket, Sudut elevasi, ground segment
Abstract
Rocket is one of the technologies in the field of defense that continues to be developed until now. A coun-try capable of mastering rocket technology will be respected by other countries around the world.In addition to being used for weapon systems, a rocket is also used for technological advances in the field to launch a wide range of satellites required by humans for communication, weather forecasts and etc. The rocket is designed to resemble a bullet equipped with wings/fins with a ratio of the width of the left wing's side span/right wing fins/fins to no more than the length of the rocket's body. The function of the wing / fin to be able to maintain the position of an elevation angle that can be controlled autonomously based on changes in angle data from the sensor. This rocket is equipped with a telemetry system, where the rocket will send information from the vehicle to the ground segment displayed in the GUI (Graphic User Interface) in real time in the form of data - height, elevation, direction and the results of the rocket movement. Test result 1 shows the average percentage of rockets to remain at an elevation angle of around 3.98%. Testing 2 about 17.86% and testing 3 around 29.30%. Testing 2 about 17.86% and testing 3 around 29.30%. The average speed of the rocket error to reach the peak is 24.7 m/s. The differ-ence in the percentage of rocket data to be in an elevation angle position is infludiffer-enced by changes in wind speed that are not stable at the time of the launch trial.
Pendahuluan
Kemajuan teknologi dibidang ketahanan dan pertahanan negara berkembang sangat pesat, salah satu teknologi yang terus dikembangkan hingga saat ini adalah teknologi roket. Roket merupakan suatu wahana yang memiliki pengaruh cukup besar dalam pertahanan suatu negara. Negara yang mampu menguasai teknologi roket akan disegani oleh Negara lainnya yang ada didunia. Selain digunakan untuk sistem alutsista sebuah negara, roket juga dapat digunakan mengorbitkan sebuah satelit. dibidang lain seperti untuk meluncurkan berbagai macam satelit yang dibutuhkan oleh manusia salah satu contoh satelit komunikasi, cuaca dan lain-lain.
Negara Kesatuan Republik Indonesia (NKRI) merupakan negara yang letaknya dikelilingi oleh beberapa negara tetangga dan memiliki beribu pulau yang terbentang luas.Untuk membantu dalam proses pemantauan dan perlindungan dari ganguan pihak luar,sehingga membutuhkan pengamanan yang cukup kuat untuk mempertahankan wilayah kesatuan republik Indonesia, salah satu sistem yang memungkinkan untuk mendorong itu semua dengan kemajuan teknologi dibidang peroketan.
Roket didesain dengan bentuk mirip peluru yang dilengkapi sayap atau ekor dengan rasio ukuran lebar bentang sisi kiri sayap atau ekor kesisi kanan sayap atau ekor tidak lebih dari setengah panjang badan roket. Roket ini dilengkapi dengan sistem telemetri, dimana roket akan mengirim informasi dari wahana ke ground segment berupa data-data dari sensor yang digunakan, data tersebut diantaranya berupa data percepatan menunjukkan sikap dari roket, ketinggian, sudut elevasi, kompas, latitude dan longitude dari sensor GPS yang berfungsi untuk mengetahui posisi dari roket.
Yulnandi dkk melakukan penelitian menghitung sikap roket dengan algoritma Direction Cosine Matrix (DCM) dan pengontrol PID digunakan untuk mengatur dinamika roket berdasarkan spesifikasi yang diinginkan.[1]
Sistem pengontrolan sikap pada penelitian ini menggunakan sistem PID. Pengontrolan sikap menggunakan PID juga pernah dilakukan oleh Kamarudin dkk dalam penelitiannya dimanfaat-kan PID untuk mengontrol sikap sebuah kubus. Pengontrolan sikap menggunakan metode PI, PD dan PID.[2][3]
Pada saat roket terbang perlu melihat po-sisi/sikap ketika roket terbang data sikap roket dikirim ke GCS. Mulyana dkk pernah melakukan riset membuat sistem komunikasi roket EDF dengan GCS. Sensor sikap yang digunakan
pa-da penelitiannya menggunakan sensor IMU (Iner-tial Measurement Unit) yang terdiri dari 3 sumbu giroskop 3-axis dan Accelerometer 3-axis.[4]
Nugroho dkk melakukan penelitian roket meng-gunakan mesin penggerak Electric Ducted Fan (EDF) roket yang memakai motor sebagai penggerak dan dikhususkan pada ketinggian rendah. Untuk memantau dan mengendalikan roket diperlukan terminal yang dinamakan Ground station (GS). Terminal ini terletak di darat dan keberadaannya wajib guna memantau misi dan data yang ditangkap oleh roket melalui media gelombang radio. [5]
Sutresman dkk melakukan penelitian ken-daraan permukaan tak berawak (USV) dioperasi-kan di permukaan air untuk tujuan tertentu. Untuk mengetahui posisi dari kendaraan tanpa awak menggunakan sistem tracking dengan me-manfaatkan sensor GPS. [6]
Pamungkas dkk meneliti roket EDF (electric ducted fan) merupakan suatu objek terbang ber-bentuk menyerupai peluru dengan menggunakan motor listrik berselubung sebagai pendorongnya. Roket ini dikendalikan secara autonomous dengan memanfaatkan sensor akselerometer, giroskop, dan magnetometer untuk mengetahui sikap roket terhadap gravitasi bumi dan magnet bumi. Dalam mengendalikan roket diperlukan suatu sistem kendali yang mampu mengen-dalikan roket dengan data sensor yang telah dio-lah menjadi nilai sikap sistem kendali yang digunakan adalah kendali proporsional integral derivatif (PID) dengan metode tuning Ziegler-Nichols.[7]
Metode Penelitian
Penelitian akan diawali dengan studi literatur sesuai dengan alat yang akan dibuat. Dian-taranya studi literatur tentang sensor-sensor, mo-tor, dan mekanik roket. Dilanjutkan dengan perancangan mekanik roket. Pada bagian ini akan dilakukan pembuatan body roket, dalam pembuatan body roket ini, akan terdapat bebera-pa bagian pembentuk roket yang terdiri dari ba-gian aktuator roket, tempat peyimpanan parasut dan tempat penyimpanan sistem payload. Perancangan sistem elektronik adalah bagian dimana sensor-sensor yang akan digunakan digabungkan menjadi satu sistem yang disebut dengan payload sistem. Payload sistem ini nant-inya akan menjadi bagian yang penting dalam pembuatan roket karena bagian ini merupakan otak yang mengatur hampir seluruh sistem yang ada pada roket. Diantaranya untuk sistem komu-nikasi roket dan untuk mengatur pergerakan ak-tuator roket. Perancangan software adalah bagi-an pembuatbagi-an sistem monitoring, biasanya
dise-but dengan GUI (Graphic User Interface). Bagian ini berfungsi untuk monitoring pergerakan roket.
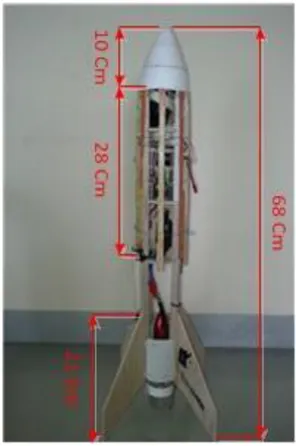
Gambar 1 merupakan dimensi dari roket yang telah dirancang.
Gambar 3.1 Dimensi Roket
Cone pada roket sangat berpengaruh pada kestabilan roket saat meluncur, cone juga dibuat lancip agar memiliki kecepatan yang maksimal. Cone dapat dilihat pada gambar 2
Gambar 2. Cone roket
Pada desain roket ini dibuat tempat penyim-panan parasut, parasut dipasang pada roket
ber-tujuan pada saat roket telah sampai pada titik ketinggian tertentu dan roket dapat mendarat dengan kecepatan dapat diatur sesuai dengan desain parasut. Parasut dapat dilihat pada gam-bar 3
Gambar 3. Parasut
Payload merupakan bagian dari sebuah ro-ket didalamnya terdapat sistem kontrol, sensor yang digunakan untuk mengetahui kondisi roket atau untuk mengetahui keadaan tertentu sesuai dengan misi dari masing-masing yang dibawa oleh roket tersebut. Payload dapat dilihat pada gambar 4.
Gambar 4. Payload
Baterai merupakan sumber energi yang digunakan roket untuk bergerak. Penentuan ka-pasitas batere sangatlah penting pada roket EDF, baterai sangat menentukan lama sebuah roket bisa bermanuper. Jika baterai habis atau dayanya berkurang roket tdak bisa bekerja dengan baik bahkan bisa mengakibatkan roket tidak bisa menjalankan misinya.
Gambar 5 merupakan bagian aktuator yang terdiri dari aktuator pitch, roll, dan yaw. Aktuator pitch (angguk) berfungsi untuk menjaga roket dari pergerakan pitch, aktuator yaw (geleng) ber-fungsi untuk menjaga roket dari pergerakan yaw dan aktutor roll (putar) berfungsi untuk menjaga roket dari pergerakan roll. Setiap pergerakan dari
aktuator menggunakan bantuan dari motor servo. Garis berwarna hijau pada gambar menunjukkan arah pergerakan dari aktuator pitch. Aktuator akan bergerak kedepan atau kebelakang. Garis berwarna orange menunjukkan arah pergerakan aktuator yaw. Aktuator akan bergerak kearah kanan atau kiri. Garis berwarna hitam menunjuk-kan arah pergeramenunjuk-kan dari aktuator roll. Arah pergerakan aktuator roll akan berbeda arah. Apabila aktuator yang sebelah kiri bergerak kebelakang maka aktuator sebelah kanan akan bergerak kearah depan. Aktuator-aktuator ini akan mengakibatkan perubahan posisi roket dengan memanfaatkan tekanan angin.
Gambar 5. Actuator Roket
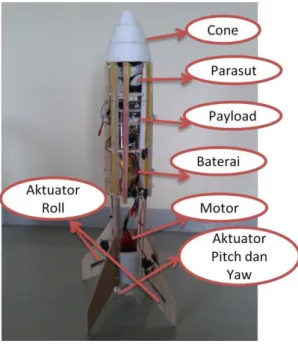
Gambar 6 merupakan gambar roket secara untuh dengan penempatan dari masing-masing bagian dari roket.
Gambar 6 Bagian Roket
Perancangan elektronik atau elektrikal payload sistem adalah skema pemasangan sen-sor, catu daya sebagai supply tegangan, motor servo, Radio Frequency (RF) dan mikrokontroler (arduino) sebagai perangkat untuk memproses
data-data sensor. Penggunaan sensor accel-erometer, barometer dan kompas tergabung da-lam sebuah modul sensor (ardupilot). Peran-cangan elektrikal payload sistem dapat dilihat pada gambar 7.
Gambar 7. Perancangan Elektrikal
Block diagram pada gambar 8 menjelaskan secara umum sistem komunikasi pengiriman data antara Graphic User Interface (GUI) dengan perangkat sensor yang ada di roket. Untuk mengaktifkan proses pengiriman data sensor dikontrol dari GUI dengan menggunakan perangkat penghubung berupa RF (Radio Frequency). Data –data yang dikirim dari sensor langsung ditampilkan pada GUI dalam bentuk grafik.
Gambar 8. Block Diagram Sistem Komunikasi Roket
Dalam perancangan roket, sistem nikasi dibedakan menjadi dua. Untuk komu-nikasi yang pertama dijelaskan yaitu bagaimana sistem penerimaan data pada mikrokontroler. Data – data tersebut berupa perintah yang dikirimkan dari GUI dan harus diproses oleh mikrokontroler. Flowchart proses penerimaan data dapat dilihat pada gambar 9
Gambar 9. Flowchart Sistem Penerima Data di Mikrokontroler
Mikrokontroler membaca data masukan yang dikirimkan dari GUI lalu membandingkann-ya. Jika karakter yang dikirimkan dari GUI berupa data “A” maka mikrokontroler akan menjalankan proses pengiriman data sensor-sensor ke GUI. Selanjutnya jika karakter yang dikirimkan berupa data “B” maka mikrokontroler akan mengirimkan data sensor-sensor sekaligus menjalankan fungsi untuk mengaktif-kan actuator penggerak sayap-sayap atau fin. Jika karakter yang dikirimkan berupa data “C” maka mikrokontroler akan menghentikan proses pengiriman data sensor-sensor ke GUI.
Gambar 10. Flowchart Sistem Penerima Data di GUI
Sistem komunikasi yang kedua yaitu proses penerimaan data-data sensor pada GUI yang dikirimkan oleh mikrokontroler. Pertama, GUI akan membaca data-data yang diterima, lalu data tersebut di parsing atau dipisahkan. Data sensor percepatan, ketinggian, dan elevasi akan dit-ampilkan dalam bentuk grafik secara real time untuk melihat sikap dari pergerakan roket yang diluncurkan. Adapun flowchart penerima data ini dapat dilihat pada gambar 10.
Gambar 11 GUI Ground Segment
Ground Segment adalah stasiun penerima data dan juga stasiun pengendali roket (transmisi data), ground segment terdiri dari sistem trans-miter–receiver/TX-RX (pemancar-penerima) dan juga software yang dapat menerima data sekaligus menyimpannya. Terdiri dari data per-cepatan, kompas, sudut elevasi, ketinggian. Data tersebut disimpan dalam memori sebagai analisa data dalam t (waktu) tertentu. Data-data dikirim secara terus menerus atau real time untuk mengetahui dinamika dari roket. Desain dari ground segment dapat dilihat pada gambar 11.
Hasil dan Diskusi
Pengujian peluncuran adalah pengujian yang dilakukan dengan meluncurkan roket sesuai dengan sudut yang telah ditentukan. Da-lam hal ini peluncuran 1 dan 2 dilakukan pada sudut 80˚ dan peluncuran 3 pada sudut 90˚.
Peluncuran 1
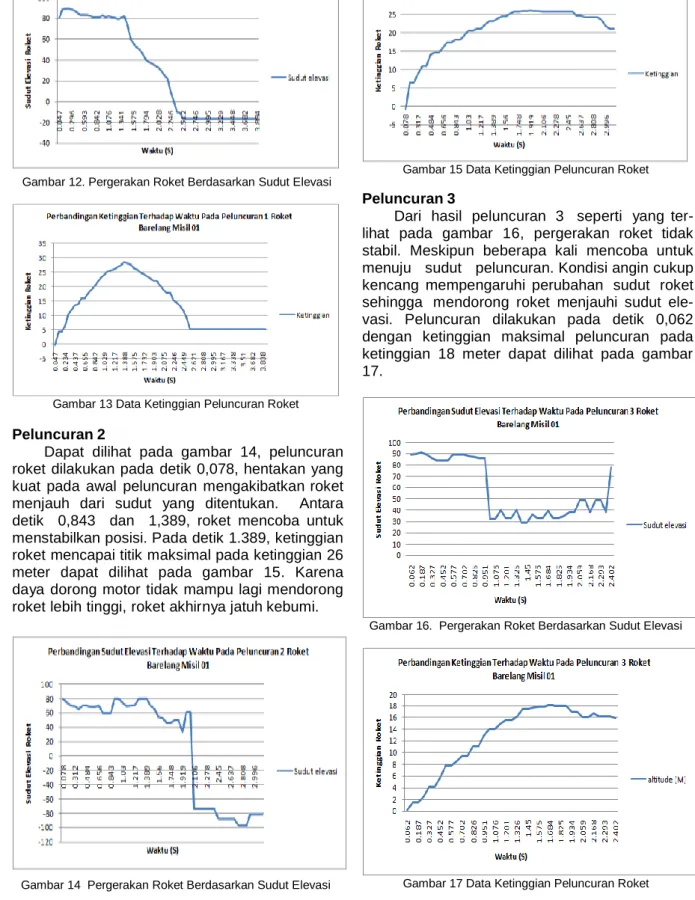
Berdasarkan data peluncuran pada gambar 12, terjadi hentakan yang cukup kuat pada awal peluncuran, sehingga sudut elevasi menjauh dari sudut 80˚. Namun pada detik 0,593 roket mencoba untuk menstabilkan posisi pada sudut 80˚. Ketinggian maksimal dari peluncuran ini be-rada pada ketinggian 28 meter dapat dilihat pada gambar 13.
Gambar 12. Pergerakan Roket Berdasarkan Sudut Elevasi
Gambar 13 Data Ketinggian Peluncuran Roket
Peluncuran 2
Dapat dilihat pada gambar 14, peluncuran roket dilakukan pada detik 0,078, hentakan yang kuat pada awal peluncuran mengakibatkan roket menjauh dari sudut yang ditentukan. Antara detik 0,843 dan 1,389, roket mencoba untuk menstabilkan posisi. Pada detik 1.389, ketinggian roket mencapai titik maksimal pada ketinggian 26 meter dapat dilihat pada gambar 15. Karena daya dorong motor tidak mampu lagi mendorong roket lebih tinggi, roket akhirnya jatuh kebumi.
Gambar 14 Pergerakan Roket Berdasarkan Sudut Elevasi
Gambar 15 Data Ketinggian Peluncuran Roket
Peluncuran 3
Dari hasil peluncuran 3 seperti yang ter-lihat pada gambar 16, pergerakan roket tidak stabil. Meskipun beberapa kali mencoba untuk menuju sudut peluncuran. Kondisi angin cukup kencang mempengaruhi perubahan sudut roket sehingga mendorong roket menjauhi sudut ele-vasi. Peluncuran dilakukan pada detik 0,062 dengan ketinggian maksimal peluncuran pada ketinggian 18 meter dapat dilihat pada gambar 17.
Gambar 16. Pergerakan Roket Berdasarkan Sudut Elevasi
Gambar 17 Data Ketinggian Peluncuran Roket
Pengujian Parasut
Pengujian parasut adalah untuk melihat apakah parasut dapat mengembang setelah
proses peluncuran roket dilakukan. Data pen-gujian parasut diambil pada percobaan 3 dapat dilihat pada gambar 16 parasut mengembang pada detik ke 2.4 dan hasil pen-gujian dapat dilihat pada gambar 18. Roket berhasil melakukan separasi dan menge-luarkan parasut sebagai sistem proteksi dari jatuh bebas.
Gambar 18 Pengujian Parasut
Data Error Hasil Peluncuran
Dalam proses peluncuran terdapat data er-ror yang disebabkan oleh berbagai macam faktor salah satu faktor yang sangat berpengaruh pada peluncuran roket adalah faktor angin.
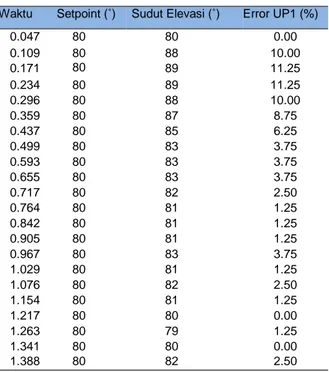
Tabel 1. Data Error Peluncuran 1
Waktu Setpoint (˚) Sudut Elevasi (˚) Error UP1 (%)
0.047 80 80 0.00 0.109 80 80 88 10.00 0.171 89 11.25 0.234 80 89 11.25 0.296 80 88 10.00 0.359 80 87 8.75 0.437 80 85 6.25 0.499 80 83 3.75 0.593 80 83 3.75 0.655 80 83 3.75 0.717 80 82 2.50 0.764 80 81 1.25 0.842 80 81 1.25 0.905 80 81 1.25 0.967 80 83 3.75 1.029 80 81 1.25 1.076 80 82 2.50 1.154 80 81 1.25 1.217 80 80 0.00 1.263 80 79 1.25 1.341 80 80 0.00 1.388 80 82 2.50
Rata – Rata Error 3.98 Tabel 2. Data Error Peluncuran 2
Waktu Setpoint (˚) Sudut Elevasi (˚) Error UP2 (%)
0.078 80 80 0.00 0.172 80 75 6.25 0.25 80 70 12.50 0.312 80 69 13.75 0.375 80 65 18.75 0.437 80 70 12.50 0.484 80 70 12.50 0.546 80 68 15.00 0.609 80 68 15.00 0.656 80 70 12.50 0.718 80 60 25.00 0.78 80 60 25.00 0.843 80 60 25.00 0.905 80 80 0.00 0.968 80 80 0.00 1.03 80 75 6.25 1.092 80 69 13.75 1.155 80 70 12.50 1.217 80 70 12.50 1.264 80 80 0.00 1.326 80 80 0.00 1.389 80 80 0.00 1.451 80 70 12.50 1.514 80 65 18.75 1.56 80 55 31.25 1.623 80 53 33.75 1.685 80 46 42.50 1.748 80 46 42.50 1.81 80 50 37.50 1.872 80 50 37.50 1.919 80 33 58.75
Rata – Rata Error 17.86 Tabel 3. Data Error Peluncuran 3
Waktu Setpoint (˚) Sudut Elevasi (˚) Error UP3 (%)
0.062 90 89 1.11 0.124 90 90 0.00 0.187 90 91 1.11 0.265 90 89 1.11 0.327 90 86 4.44 0.39 90 84 6.67 0.452 90 84 6.67 0.499 90 84 6.67 0.577 90 89 1.11 0.639 90 89 1.11 0.702 90 89 1.11 0.764 90 88 2.22 0.826 90 87 3.33 0.889 90 86 4.44 0.951 90 86 4.44 0.998 90 32 64.44 1.076 90 32 64.44 1.138 90 40 55.56 1.201 90 33 63.33 1.263 90 33 63.33 1.326 90 40 55.56 1.388 90 29 67.78 1.45 90 29 67.78 1.497 90 36 60.00 1.575 90 33 63.33
Waktu Setpoint (˚) Sudut Elevasi (˚) Error UP3 (%)
1.622 90 33 63.33
1.684 90 39 56.67
Rata – Rata Error 29.30
Untuk mencari nilai error dari data peluncuran, dapat digunakan rumus
Simpulan
1. Data yang digunakan untuk membantu menganalisa dan mengetahui perilaku perge-rakan roket ketika terbang menggunakan da-ta waktu dan dada-ta sudut elevasi.
2. Roket telah berhasil mengirimkan data secara real time ke ground segment.
3. Persentase rata-rata error roket untuk tetap berada pada sudut elevasi pada peluncuran pertama sekitar 3,98%, peluncuran kedua 17,86% dan peluncuran ketiga 29,30%. Peru-bahan data tersebut dikarenakan kondisi an-gin yang tidak stabil pada saat peluncuran. 4. Ketinggian maksimum roket pada peluncuran
pertama sekitar 28 m, peluncuran kedua 26 m dan peluncuran ketiga 18 m.
5. Kecepatan rata- rata roket untuk mencapai puncak sekitar 24,7 m/s.
Ucapan Terima Kasih
Ucapan terima kasih disampaikan kepada Politeknik Negeri batam dan LAPAN yang telah banyak membantu dalam proses penelitian ini.
Daftar Pustaka
[1]. Yulnandi, R.A., Machbub, C., Prihatmanto, A.S. and Hidayat, E.M.I., 2017. Design and implementation of hardware in the loop sim-ulation for electric ducted fan rocket control system using 8-bit microcontroller and real-time open source middleware. Journal of Mechatronics, Electrical Power, and
Vehicu-lar Technology, 8(1), pp.60-69.
[2]. Kamarudin, Pitowarno, E., 2015, Septem-ber. 2D independent actuator control based on a Proportional Derivative Active Force Control. In 2015 International Electronics
Symposium (IES) (pp. 79-84). IEEE.
[3]. Kamarudin, Endra Pitowarno dan R. Sang-gar Dewanto, 2016, June. 3D Independent Actuators Control B ased On A Proportional Derivative Active Force Control. Journal of Ocean, Mechanical and Aerospace-Science and Engineering. 32.pp.12-17.
[4]. Mulyana, A. and Faiz, L.A.A., 2018, Febru-ary. Designing on-Board Data Handling for EDF (Electric Ducted Fan) Rocket. In IOP Conference Series: Materials Science and
Engineering (Vol. 306, No. 1, p. 012004).
IOP Publishing.
[5]. Nugroho, A.A., Bruhanuddin, B. and Su-raatmaja, M.S., 2015. Perancangan Dan Realisasi Sistem Kendali Dan Komunikasi Multi Client Ground Station Untuk Edf Ro-ket. eProceedings of Engineering, 2(2).
[6]. Sutresman, O., Syam, R. and Asmal, S., 2017. Controlling Unmanned Surface Vehi-cle Rocket using GPS Tracking Method. Int.
J. Technol, 8, pp.709-718.
[7]. Pamungkas, W., Sumbodo, B.A.A. and Atmaji, C., 2017. Implementasi Kalman Filter Pada Kendali Roket EDF. IJEIS (Indonesian Journal of Electronics and Instrumentation
Systems), 7(1), pp.37-48.
[8]. Budiastra, I.N., Partha, C.G.I., Janardana, I.G. and Wijaya, I.W., Graphic Monitoring on Test of Rocket Launch Payload. Journal of
Electrical, Electronics and Informatics, 1(2),