Rancang Bangun Ruang Uji Temperatur Terkendali Berbasis
Mikrokontroller untuk Alat Penjejak Kurva Tertutup Histeresis Elektrik
Putra Hindarpratama, Dr. Muhammad Hikam M.Sc, dan Drs. Arief Sudarmaji M.TDepartemen Fisika, FMIPA, Universitas Indonesia, Depok, 16424, Indonesia
E-mail: [email protected]
Abstrak
Pada penelitian kali ini telah dibuat ruang uji yang dapat digunakan untuk melakukan proses pemanasan beserta alat pemanas terintegrasi dengan temperatur terkendali berbasis mikrokontroler dengan dilengkapi heater berdaya 600 W, 220 VAC dan sebagai sensor temperatur digunakan sensor temperatur termokopel tipe K yang memiliki range deteksi -200
0C hingga 1200 0C. Sebagai pengendali digunakan sebuah mikrokontroler ATMega8 yang
digunakan sebagai pengontrol pemanas dan Solid State Relay yang dapat mengatur tegangan yang masuk pada trafo step-down dan keluaran dari trafo step-down akan mempengaruhi arus keluaran dari sistem. Di samping itu mikrokontroler juga menerima dan mengirimkan data ke komputer dengan software LabView dimana set point dari LabView dan output dari mikrokontroler ditampilkan dalam bentuk nilai dan grafik. Dalam pengaturan panas heater, peneliti menggunakan teknik kontrol PID dengan metode kurva reaksi.
The Design of Temperature Controlled Furnace - Based Microcontroller for Electric Hysteresis Loop Tracer Instrument
Abstract
In this study, a furnace has been made that can be used to perform the heating process along with the integrated heater with controlled temperature based on a microcontroller that equipped with a 600 W, 220 VAC heater and a K type thermocoupke that has detection range from -200 0C to 1200 0C is used as a temperature sensor. ATMega 8 microcontroller is used as a heater controller and Solid State Relay that can regulate the input and output at step-down transformator and will affect the output current of the system. In addition, the microcontroller also received and sent data to the computer with LabVIEW software where the set point from LabVIEW and the output from microcontroller displayed in the form of values and graphics. The PID control techniques with reaction curve method, is used as a heater heat settings.
PENDAHULUAN
Ilmu pengetahuan dan teknologi selalu berkembang dan mengalami kemajuan, sesuai dengan perkembangan zaman dan cara berfikir manusia. Salah satunya ialah di bidang elektronika, perkembangan di bidang elektronika ini juga dapat menunjang bidang-bidang sains lainnya, misalnya di bidang material science. Alat pemanas adalah alat yang sangat sering digunakan pada kehidupan manusia sehari-hari. Biasanya pada kehidupan rumah tangga pemanas diaplikasikan sebagai alat untuk memasak, menanak nasi, pemanas air dan sebagainya. Untuk cakupan yang lebih luas bahkan pemanas menjadi hal yang sangat penting penunjang perekonomian, karena alat tersebut sangat banyak digunakan dalam industri, mulai dari industri makanan hingga industri pengepakan dan dari industri rumahan hingga industri besar seperti pabrik-pabrik makanan, minuman, maupun pengepakan. Namun di samping aplikasi alat tersebut terdapat tekhnik kontrol yang berbeda-beda pula, yaitu ada yang terkendali secara manual, ada pula yang terkendali otomatis.
Saat ini telah banyak sistem pemanas yang telah terkendali secara otomatis, tetapi pada aplikasinya masih jarang yang menggunakan software LabView sebagai pengontrolnya. Oleh karena itu tujuan skripsi ini adalah untuk membuat atau merancang bangun sebuah ruang uji
sample penjejak kurva tertutup histeresis elektrik temperatur terkendali berbasis
mikrokontroler sehingga perubahan suhu dapat dikontrol oleh sebuah komputer melalui
software LabView
Masalah pokok dalam penelitian ini adalah membuat rancang bangun ruang uji sistem pengendalian temperatur dan melakukan pengujian respon sistem pada ruang uji. Tujuan dilakukannya penelitian ini adalah membuat rancang bangun ruang uji sistem temperatur terkendali berbasis mikrokontroler untuk alat penjejak kurva tertutup hysteresis elektrik dan
software LabView sehingga didaptkan sebuah sistem terintegrasi.
TINJAUAN TEORITIS
Pada bab ini akan dibahas semua teori yang mendukung perancangan alat yang mencakup sensor temperatur termokopel, PWM (Pulse Widht Modulation), Solid State Relay dan kontrol PID (Proportional, Integral, and Differential).
A. Sensor Temperatur Termokopel
Pada tahun 1822, Seebeck melakukan percobaan dengan menghubungkan plat bismut diantara kawat-kawat tembaga. Hubungan tersebut diberi suhu yang berbeda. Ternyata pada rangkaian
tersebut akan muncul arus listrik. Munculnya arus listrik mengindikasikan adanya beda potensial antara ujung-ujung kedua sambungan.
Dari percobaan Seebeck tersebut dapat diambil kesimpulan bahwa adanya perbedaan suhu antara kedua sambungan logam tersebut akan menyebabkan munculnya gaya gerak listrik antara ujung-ujung sambungan. Gaya gerak listrik yang muncul ini disebut dengan gaya listrik termo dan sumbernya disebut termokopel.
Berdasarkan hal tersebut di atas maka telah dilakukan penelitian yang meneliti pengaruh perbedaan suhu antara dua sambungan logam dengan gaya gerak listrik yang timbul diantara ujung-ujung sambungan, yang akhirnya berujung pada penentuan elektromotansi termal dari beberapa sambungan logam yang berbeda (termokopel).
B. PWM (Pulse Widht Modulation)
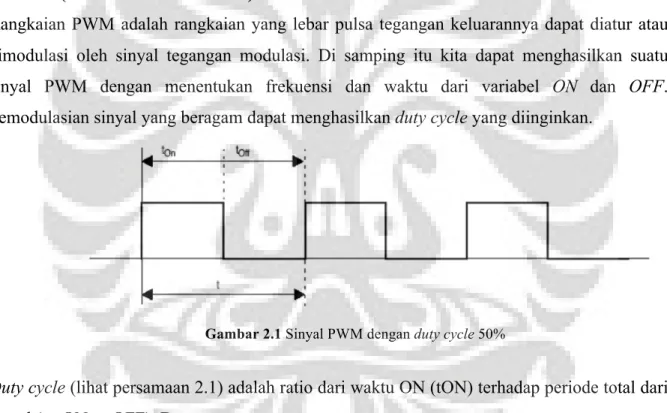
Rangkaian PWM adalah rangkaian yang lebar pulsa tegangan keluarannya dapat diatur atau dimodulasi oleh sinyal tegangan modulasi. Di samping itu kita dapat menghasilkan suatu sinyal PWM dengan menentukan frekuensi dan waktu dari variabel ON dan OFF. Pemodulasian sinyal yang beragam dapat menghasilkan duty cycle yang diinginkan.
Gambar 2.1 Sinyal PWM dengan duty cycle 50%
Duty cycle (lihat persamaan 2.1) adalah ratio dari waktu ON (tON) terhadap periode total dari
sinyal (t=tON + tOFF). Dengan persamaan :
(2.1)
C. Solid State Relay
Solid State Relay (SSR) adalah sebuah saklar ON-OFF atau sering disebut juga saklar
semikonduktor. Perbedaan SSR dari saklar pada umunya adalah SSR tidak memiliki bagian yang bergerak, sehingga tidak ada kontak pada bagian permukaan, selain itu SSR juga dapat digabungkan dengan rangkaian transistor dan sirkuit IC. Hal ini menyebabkan SSR memiliki keunggulan berupa tidak ada penurunan performa kerja.
SSR bekerja apabila ada tegangan diberikan kepada SSR, akan mengakibatkan LED menyala dan kemudian menyinari photosensitive diode. Hal ini menyebabkan timbulnya tegangan diantara MOSFET dan GATE, sehingga mengakibatkan MOSFET dalam kondisi ON.
D. Kontrol PID (Proportional, Integral, dan Differential)
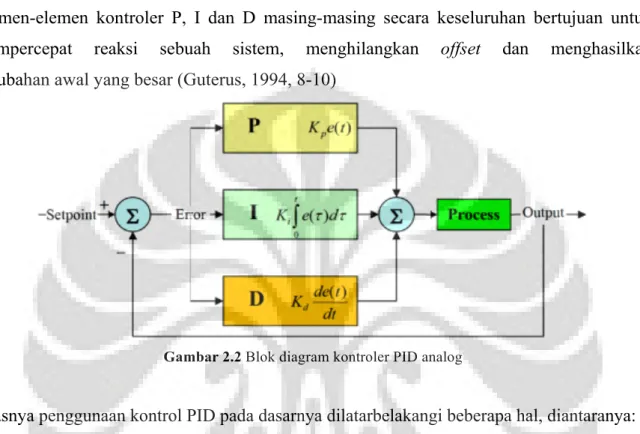
Elemen-elemen kontroler P, I dan D masing-masing secara keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem, menghilangkan offset dan menghasilkan perubahan awal yang besar (Guterus, 1994, 8-10)
Gambar 2.2 Blok diagram kontroler PID analog
Luasnya penggunaan kontrol PID pada dasarnya dilatarbelakangi beberapa hal, diantaranya: • Kesederhanaan struktur kontrol: Selain hanya ada tiga parameter utama yang
perlu diatur atau dilakukan usaha penalaan (tuning), pengaruh perubahan setiap parameter PID terhadap dinamika pengontrolan secara intuitive mudah dipahami oleh operator.
• Kontrol PID memiliki sejarah yang panjang. Dalam hal ini PID telah digunakan jauh sebelum era digital berkembang (yaitu sekitar tahun 1930-an).
• Kontrol PID dalam banyak kasus telah terbukti menghasilkan unjuk kerja relatif memuaskan, baik digunakan sebagai sistem Regulator (sistem kontrol dengan
setpoint konstan dan beban cenderung berubah-ubah) maupun sebagai sistem
Servo (sistem kontrol dengan setpoint yang berubah dan beban cenderung konstan)
E. Metode Kurva Reaksi
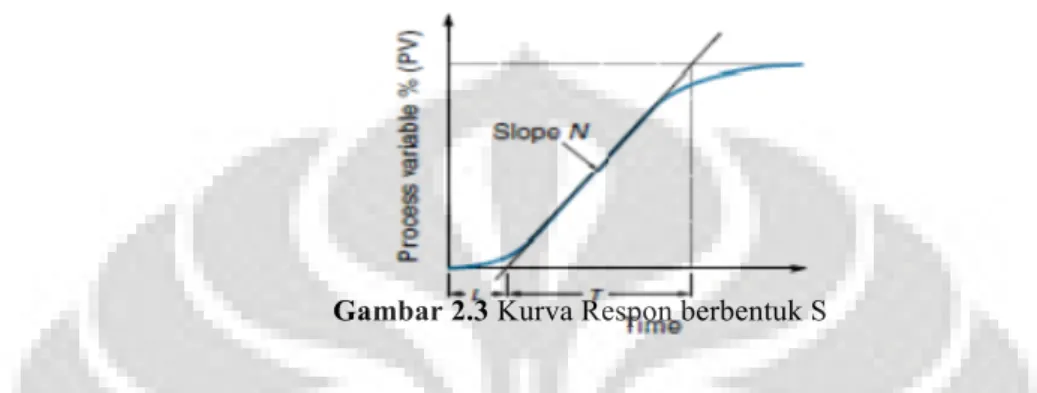
Metode ini didasarkan terhadap reaksi sistem untaian terbuka. Plant sebagai untaian terbuka dikenai sinyal fungsi tangga satuan. Kalau plant minimal tidak mengandung unsur integrator ataupun pole-pole kompleks, reaksi sistem akan berbentuk S. Gambar 2.3 menunjukkan kurva berbentuk S tersebut. Kelemahan metode ini terletak pada ketidakmampuannya untuk plant integrator maupun plant yang memiliki pole kompleks.
Gambar 2.3 Kurva Respon berbentuk S
Kurva berbentuk-s mempunyai dua konstanta, waktu mati (dead time) L dan waktu tunda T. Dari gambar 2.3 terlihat bahwa kurva reaksi berubah naik, setelah selang waktu L. Sedangkan waktu tunda menggambarkan perubahan kurva setelah mencapai 66% dari keadaan mantapnya. Pada kurva dibuat suatu garis yang bersinggungan dengan garis kurva. Garis singgung itu akan memotong dengan sumbu absis dan garis maksimum. Perpotongan garis singgung dengan sumbu absis merupakan ukuran waktu mati, dan perpotongan dengan garis maksimum merupakan waktu tunda yang diukur dari titik waktu L. Tabel 2.1 merupakan rumusan penalaan parameter PID berdasarkan cara kurva reaksi.
Tabel 2.2 Penalaan paramater PID dengan metode kurva reaksi
Tipe Kontroler Kp Ti Td
P T/L ~ 0
PI 0,9 T/L L/0.3 0
PID 1,2 T/L 2L 0,5L
Menghitung slope dari kurva.
N = ∆PV (2.2)
Dimana: N = Sistem kuva respon pada slope.
∆PV = Perubahan proses variable dalam persen (%).
T = Rise time, dari kurva respon.
Menghitung konstanta PID
(2.3)
(2.4)
KD = 0.5L (2.5)
Dimana: ∆CV = Control variable dalam perubahan persen (output controller). N = Slope.
L = Lag time.
METODE PENELITIAN
Ruang uji temperatur terkendali untuk alat penjejak kurva tertutup histeresis elektrik ini dirancang seperti elektrik furnace agar pengambilan data dapat dilakukan dengan lancar dan mampu menjangkau dalam operasi suhu tinggi. Alat ini terdiri dari beberapa bagian mekanik yaitu bagian mekanik heater, keramik fiber, sensor termokopel, tiang holder dan penjepit. Kotak furnace terbuat dari besi yang terdiri dari badan furnace, furnace shell (bagian terluar dari furnace yang dibuat dengan cara pengelasan), roof (penutup bagian atas ini berbentuk seperti kubah) bertujuan sebagai pengisolasi panas agar panas tersebut tidak keluar. Bahan tersebut cukup kuat untuk digunakan dan mudah dalam pembuatan lubang – lubang penempatan komponen dalam. Untuk sensor yang digunakan adalah termokopel tipe K, dimana sensor ini terbuat dari stainless steel, bahan tersebut juga kuat terhadap bahan – bahan kimia.
Pada rangkaian ini terdapat mikrokontroler ATmega8 sebagai prosesor (pengendali) dan IC MAX232 sebagai driver untuk menghubungkan rangkaian dengan PC. Rangkaian sistem pengendali berperan untuk mengendalikan seluruh rangkaian agar dapat mengatur keluaran temperatur sesuai yang diinginkan. ATmega8 adalah mikrokontroler CMOS 8-bit berarsitektur AVR RISC yang memiliki 8K Bytes di sistem pemrograman. Mikrokontroler ini mengkonsumsi daya yang rendah dan mampu mengeksekusi instruksi dengan kecepatan maksimum 16 MIPS pada frekuensi 16 MHz.
HASIL DAN PEMBAHASAN A. Kalibrasi Sensor Termokopel
Kalibrasi sensor termokopel pada penelitian ini dilakukan pemanasan pada air sebanyak 600 ml dengan menggunakan referensi alat ukur temperatur, yaitu termometer gelas dan termometer fluke digital.
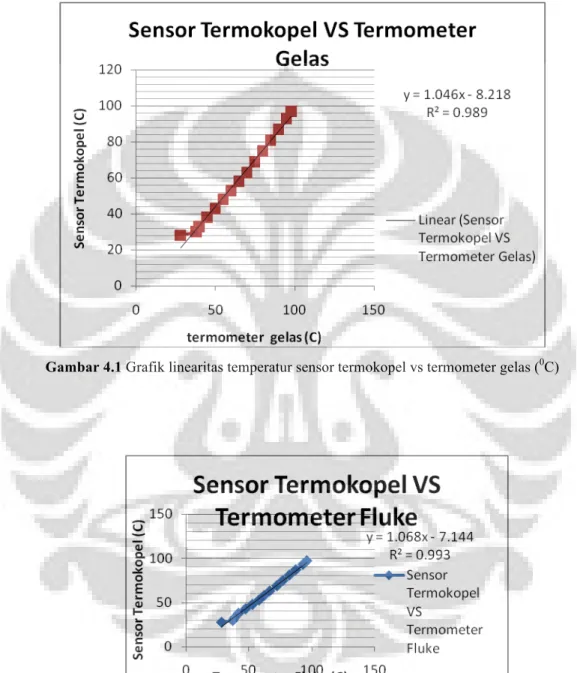
Gambar 4.1 Grafik linearitas temperatur sensor termokopel vs termometer gelas (0C)
Gambar 4.2 Grafik linearitas temperatur sensor termokopel vs termometer fluke digital (0C)
Pada gambar 4.1 dan 4.2 dapat dilihat grafik linearitas pada alat ukur sensor termokopel dengan termometer ruang dan termometer fluke. Persamaan gradien untuk kalibrasi sensor termokopel pada termometer ruang adalah y = 1.046x - 8.218 ; R² = 0.989 dan persamaan gradien untuk kalibrasi sensor termokopel pada termometer fluke digital adalah y = 1.068x -
7.144 ; R² = 0.993. Keseimbangan temperatur pada sensor termokopel dengan referensi termometer ruang dan termometer fluke digital terjadi pada temperatur 900C.
B. Pengukuran Tegangan Terhadap ADC
Kalibrasi ADC pada mikrokontroler diperlukan untuk memastikan nilai ADC yang didapat sesuai dengan rumus ADC. Gambar 4.3 berikut ini merupakan hasil rata-rata pengambilan nilai ADC dari 2 kali percobaan.
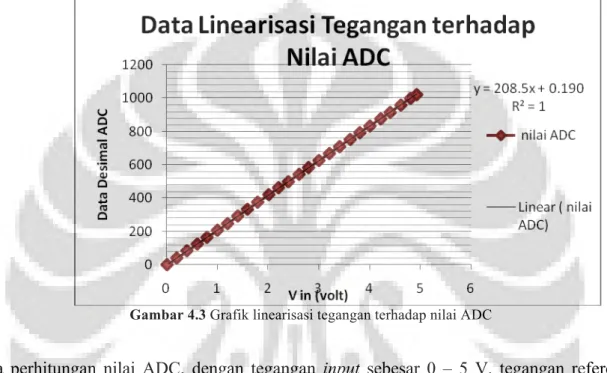
Gambar 4.3 Grafik linearisasi tegangan terhadap nilai ADC
Secara perhitungan nilai ADC, dengan tegangan input sebesar 0 – 5 V, tegangan referensi sebesar 5 V dan ADC 10 bit, maka nilai ADC yang didapat ketika tegangan input sebesar 0.015 V adalah sebesar 1.5 dan 4.92 V adalah sebesar 1023. Dari hasil pengkalibrasian yang didapat, perubahan nilai tegangan input terhadap nilai ADC cukup akurat hasilnya. Persamaan gradien untuk kalibrasi nilai ADC adalah .
C. Pengujian Respon Sistem
Dengan memberikan nilai MV 30%, akan didapatkan waktu yang dicapai atau ditempuh sampai keadaan respon menuju stabil. Percobaan ini dilakukan secara manual mode, maka power akan diberikan dalam bentuk persen.
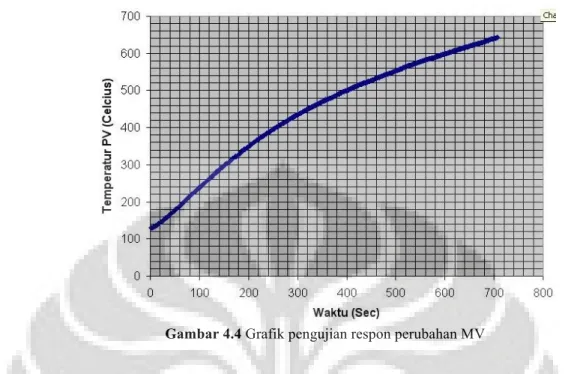
Gambar 4.4 Grafik pengujian respon perubahan MV
Dari gambar grafik di atas didapatkan perhitungan waktu turun (Lag Time = L) dan waktu naik (Rise Time=T). Lag Time adalah waktu tunda antara kontroller output dan respon variabel kontrol.
L = 22 * 2s = 44 s
T = 580-22= 558 * 2s = 1116 s
CV = 30% , Power heater yang digunakan
Untuk mencari nilai KP, Ki, dan KD dapat dilakukan melalui perhitungan sebagai berikut :
D. Pengujian Sistem Terkendali
Dari persamaan diatas didapat nilai Kp = 0.16, KI = 0.011, dan KD = 22. Proses pengontrolan temperatur dengan menggunakan aksi kontrol PID, a k a n menampilkan hasilnya pada LCD berupa set point dan suhu aktual, serta menampilkan hasil sampling suhu setiap 2 detik ke komputer. Melalui komunikasi serial RS232 yang digunakan untuk pembuatan grafik analisa respon suhu hasil pengaturan. Dari grafik dapat dilihat bahwa percobaan waktu terletak pada sumbu x dan temperatur pada sumbu y.
Akan tetapi telah terjadi kendala pada saat melakukan pengujian sistem terkendali. Terjadinya kerusakan pada rangkaian PCB utama sistem kendali dan sensor termokopel. Hal ini memberikan hasil yang kurang maksimal, menampilkan hasil yang buruk pada LCD mengenai tidak terbacanya data set point dan suhu aktual dan input dari sensor termokopel yang tidak sesuai dengan suhu yang diperolehnya.
Oleh karena itu, peneliti belum dapat melakukan pengambilan data pada pengujian sistem terkendali. Meskipun terjadi kendala, apabila dilakukannya perapihan ulang pada rangkaian PCB utama dan pergantian termokopel yang lebih baik, maka sensor akan dapat memberikan hasil suhu yang sesuai dari pemanas dan sistem bergerak pasti menyesuaikan diri dengan set point.
PENUTUP A. Simpulan
Setelah menyelesaikan perancangan sistem serta pengambilan data, maka penulis dapat menarik kesimpulan bahwa :
1. Dari hasil pengkalibrasian nilai sensor termokopel dengan termometer ruang dan termometer fluke digital, nilai yang didapat dari percobaan dan perhitungan tidak jauh berbeda, sehingga dapat disimpulkan sensor termokopel bekerja dengan baik.
2. Percobaan temperatur terhadap ADC didapatkan persamaan garis y =208.5x + 0.190.
3. Sistem tuning PID menggunakan metode kurva raeksi, maka didapatkan nilai lag
time (L) sebesar 22 dan nilai rise time (T) sebesar 1116.
Dengan melakukan proses sistem kontrol didapatkan nilai Kp = 0.16, Ki = 0.011 dan KD =22.
1. Perancangan ruang uji harus di design semaksimal mungkin, agar tidak terjadi masalah dalam uji sistem yang ada.
2. Jalur kabel lebih diperhatikan penempatanya, sehingga tidak terjadi short circuit.
3. Penempatan sensor sebaiknya dekat dengan heater, agar sistem cepat merespon perubahan thermal yang terjadi.
4. Isolator sangat diperlukan agar panas yang terjadi dapat berkurang.
5. Menggunakan sensor termokopel dengan fasilitas yang memungkinkan pada suhu yang tinggi.
REFERENSI
Allegro MicroSystems, LLC. (2006). ACS712 Fully Integrated, Hall-Effect Based Linear
Current Sensor IC. Massachusetts: Allegro MicroSystems, LLC.
Faulkenberry, L. M. (1082). An Introduction to Operational Amplifiers. Taipei: John Wiley & Sons.
Giancoli, Douglas C. 2001. Fisika Edisi Kelima (Terjemahan). Jakarta: Erlangga Hart, D. W. (2011). Power Electronics. Singapore: McGraw Hill.
Kurnianto, Imam Azis. 2001. Rancang Bangun Alat Pencuci Piring Berbasis
Mikrokontroler: Depok. Universitas Indonesia
Malvino, A. P. (2003). Prinsip-prinsip Elektronika (terjemahan). Jakarta: Penerbit Salemba Teknika.
Sung, S. W., Lee, J., & Lee, I.-B. (2009). Process Identification and PID Control. Singapore: John Wiley & Sons.
Webster. John G. 1998. Measurement, Instrumentation, and Sensors Handbook: CRC Press.
Zuhal. (2000). Dasar Teknik Tenaga Listrik dan Elektronika Daya. Jakarta: Erlangga. Elektro Indonesia. Pengenalan Metode Ziegler-Nichols pada Perancangan Kontroler
pada PID. Edisi ke Dua Belas, Maret 1998.
Wijaya, Ade Mundari. 2011. ”Rancang Bangun Alat Pemanas dan Pengaduk Terintegrasi dengan Temperatur dan Kecepatan Terkendali Berbasis Mikrokontroler”. Dalam Laporan Tugas Akhir. Depok : Departemen Fisika, Universitas Indonesia.
Husna, Rasmi. 2009. “Rancang Bangun Ruang Vakum Temperatur Terkendali Untuk Alat Ukur Uji Impedansi Bahan Variabel Temperatur”. Dalam Laporan Tugas Akhir. Depok : Departemen Fisika, Universitas Indonesia.