22
BAB 2
LANDASAN TEORI
2.1 Latar Belakang Historis
Salah satu faktor yang penting yang menunjukkan karakteristik masyarakat industri yang hidup dinegara maju ialah banyaknya orang yang hidup di dalam lingkungan fisik yang merupakan hasil budi daya manusia (man made). Hal ini akan kontras sekali dengan kehidupan masa lampau di saat kebanyakan dari mereka masih hidup dalam lingkungan alam yang asli (natural environment). Hasil-hasil fisik buatan manusia ini meliputi banyak hal seperti: bangunan gedung, mesin, peralatan kerja, kendaraan, jalan raya, dll.
Perubahan waktu walaupun secara perlahan – lahan telah merubah manusia dari keadaan primitif atau tradisional menjadi manusia berbudaya atau modern. Disini manusia berusaha mengadaptasikan menurut situasi dan kondisi lingkungannya. Hal ini terlihat pada perubahan rancangan peralatan (teknologi) yang dipergunkan manusia untuk menaklukan alam lingkungannya. Banyak bukti yang menunjukkan perbuatan manusia untuk menyesuaikan diri mereka dengan kondisi alam yang pada dasarnya hal ini akan menunjukkan tingkat kebudayaan mereka yang berkembang dari saat ke saat. Tujuan pokok manusia adalah untuk selalu mengadakan perubahan rancangan peralatan – peralatan yang dipakai untuk memudahkan dan mengenakkan
23
abad 20 ini yang berkaitan dengan perancangan peralatan dan fasilitas kerja yang memperhatikan aspek – aspek manusia sebagai pemakainya dikenal degan nama ergonomi.
2.2 Ergonomi
Ergonomi sebenarnya berasal dari kata Yunani yaitu Ergo yang berarti kerja dan
Nomos yang berarti hukum. Dengan demikian ergonomi dimaksudkan sebagai
disiplin keilmuan yang mempelajari manusia dalamkaitannya dengan pekerjaanya. Istilah ergonomi lebih populer digunakan oleh negara Eropa Barat. Di Amerika istilah ini lebih dikenal sebagai Human Factor Engineering atau Human Engineering. Disiplin ergonomi secara khusus akan mempelajari keterbatasan dari kemampuan manusia dalam berintaraksi dengan teknologi dan produk – produk buatannya. Disiplin ini bearangkat dari kenyataan bahwa manusia memiliki batas – batas kemampuan baik jangka pendek maupun jangka panjang pada saat beradapan dengan keadaan lingkungan sistem kerjanya yang berupa perangkat keras / hardware (mesin, peralatan kerja, dan lain – lain) atau perangkat lunak / software (metode kerja, sistem dan lain – lain). Dengan demikian terlihat jelas bahwa ergonomi adalah suatu keilmuan yang multi disiplin, karena disini akan mempelajari pengetahuan – pengethuan dari ilmu kehayatan (biologi, kedokteran), ilmu kejiwaan (psikologi) dan kemasyarakatan (sosiologi). Pada prisipnya disiplin ergonomi akan mempelajari apa akibat – akibat jasmani, kejiwaan, dan sosial dari teknologi dan produk – produknya
24
maupun makro. Karena yang dipelajari adalah akibat – akibat (dampak) dari teknologi dan produk – produknya, maka pengetahuan yang khusus dipelajari akan berkaitan dengan teknologi seperti biomekanika, anthopometri teknik, teknologi produksi, lingkungan fisik (temperatur, pencahayaan, dsb) dan lain – lain. M aksud dan tujuan disiplin ergonomi adalah mendapatkan suatu pengetahuan yang utuh tentang permasalahan – permasalahan interaksi manusia dengan teknologi dan produk – produknya, sehingga dimungkinkan adanya suatu rancangan sistem manusia-manusia (teknologi) yang optimal. Dengan demikian disiplin ergonomi melihat permasalahan interaksi tersebut sebagai suatu sistem dengan pemecahan – pemecahan masalahnya melalui proses pendekatan sistem pula.
Human Engineering atau sering pula disebut sebagai ergonomi didefinisikan
sebagai perancangan man machine interface sehingga pekerja dan mesin bisa berfungsi lebih efektif dan efisien sebgai sistem manusia mesin yang terpadu. Disiplin ini akan mencoba membawa ke arah proses perancangan mesin yang tidak saja memiliki kemampuan produksi yang lebih canggih lagi, melainkanjuga memperhatikan aspek – aspek yang berkaitan dengan kemampuan dan keterbatasan manusia yang mengoperasikan mesin tersebut. Tujuan pokoknya adalah terciptanya desain sistem manusia mesin yang terpadu sehingga efektifitas dan efisiensi kerja bisa tercapai secara optimal.
25
Disiplin ilmu ergonomi banyak di aplikasikan dalam berbagai proses perancangan produk (man made objects) ataupun operasi keja sehari – harinya. Demikian juga dalam sebuah stasiun keja, semua fasilitas kerja seperti peralatan, material dan lain – lain haruslah diletakkan didepan dan berdekatan (jarak jangkauan normal) dengan posisi operator kerja. Hal ini sesuai dengan prinsip – prinsip ergonomi gerakan. Dengan mengaplikasikan aspek – aspek ergonomi dapat dirancang sebuah stasiun kerja yang dapat dioperasikan oleh rata – rata manusia. Disiplin ergonomi khususnya yang berkaitan dengan pengukuran dimensi tubuh manusia
(anthopometri), telah menganalisa, mengevaluasi dan membakukan jarak jangkau
yang memungkinkan rata manusia untuk melaksanakan kegiatannya dengan mudah dan gerakan – gerakan sederhana. Disiplin ilmu ergonomi memiliki beberapa ruang lingkup antara lain : anthropometry, biomechanics, mechanical engineering,
industrial engineering, industrial design, kinesiology, physiology.
Dalam ilmu Ergonomi terdapat lima aspek penting yaitu: safety, comfort, ease of
use, productivity/performance, dan aesthetic. Berdasarkan aspek ergnomi tersebut
akan diberikan contoh suatu produk akan memberikan manfaat untuk mendesain ulang berdasarkan prinsip ergonomi.
26
1. Safety.
Prinsip ergonomi ini menerapkan dari sisi keselamatan, sebagai contoh: botol obat. Pada botol obat tersebut dibuat dengan tulisan yang lebih tebal atau berwarna ini ditujukan agar para penderita gangguan mata dapat lebih mudah dalam melihat takaran obat, sebagai contoh kadar dosis, cara pemakaian, cara penyimpanan, dan lain-lain.
2. Comfort
Kenyamanan pada saaat mengunakan suau produk ditekankan pada prinsip ilmu ergonomi. Tujuaannya adalah agar para pengguna dapat nyaman menggunakan produk tersebut. Contoh : perancangan pada pegangan tang yang nyaman.
3. Ease of use
Suatu produk juga diharuskan agar dapat mudah digunakan, sehingga para konsumen tidak perlu membaca cara pakai produk tersebut tetapi secara otomatis konsumen dapat menggunakan produk tersebut.
4. Productivity/performance
Salah satu contoh yang dapat dilihat dalam aspek ini adalah voicemail, dimana para konsumen tidak harus menunggu lama dalam menunggu instruksi di
27
telepon, dengan salah satu aspek ini voicemail dirancang agar lebih cepat dan instruksi dapat dilewatkan.
5. Aesthetic
Pada aspek ini tampilan dari suatu produk sangat dionjolkan dimana para konsumen dapat menyukai suatu produk dengan hanya melihat sekali saja.
2.2.1 Anthopometri
Istilah Anthopometri berasal dari anthro yang berarti manusia dan metri yang berarti ukuran. Secara definitif anthopometri dapat dinyatakan sebagai suatu studi yang berkaitan dengan pengukuran dimensi tubuh manusia. M anusia pada dasarnya akan memiliki bentuk, ukuran (tinggi, lebar, dsb) berat dan lain-lain yang berbeda antara satu dengan lainnya. Anthopometri secara luas akan digunakan sebagai pertimbangan-pertimbangan ergonomis dalam memerlukan interaksi manusia. Data anthopometri yang berhasil diperoleh akan diaplikasikan secara luas antara lain dalam hal:
• Perancangan areal kerja (work station)
• Perancangan peralatan kerja seperti mesin, equipment, perkakas, dsb.
• Perancangan produk-produk konsumif seperti pakaian, kursi, meja komputer, dll.
28
Dengan demikian dapat disimpulkan bahwa data anthopometri akan menentukan bentuk, ukuran dan dimensi yang tepat yang berkaitan dengan produk yang dirancang dan manusia yang akan mengoperasikannya menggunakan produk tersebut. Dalam kaitan ini maka perancang produk harus mampu mengakomodasikan dimensi tubuh dari populasi terbesar yang akan menggunakan produk hasil rancangannya tersebut. Secara umum 90-95 % dari populasi yang menjadi target dalam kelompok pemakai suatu produk haruslah mampu menggunakannya dengan selayaknya. Dalam beberapa kasus tertentu ada beberapa produk sebagai contoh kursi mobil yang dirancang secara fleksibel, dapat digerakkan maju mundur dan sudut sandarannya bisa pula dirubah untuk menciptakan posisi yang nyaman. Rancangan produk yang dapat diatur secara fleksibel jelas memberikan kemungkinan lebih besar bahwa produk tersebut akan mampu dioperasikan oleh setiap orang meskipun ukuran tubuh mereka berbeda-beda. Pada dasarnya peralatan kerja yang dibuat dengan mengambil referensi dimensi tubuh tertentu jarang sekali dapat mengakomodasikan seluruh range ukuran tbuh dari populasi yang akan memakainya.
Data anthopometri dan cara pengukurannya
M anusia pada umumnya akan berbeda-beda dalam hal bentuk dan dimensi ukuran tubuhnya. Disini ada beberapa faktor yang akan mempengaruhi ukuran tubuh manusia, sehingga sudah semestinya seorang perancang produk harus memperhatikan faktor-faktor tersebut yang antara lain:
29
1 Umur, secara umum dimensi tubuh manusia akan tumbuh dan bertambah besar, seiring dengan bertmbahnya umur yaitu sejak awal kelahiran sampai dengan umur 20 tahunan. Dari suatu penelitian yang dilakukan oleh A.F Roche dan G.H
Davila (1972) di USA diperoleh bahwa laki-laki akan berkembang sampai naik
sampai dengan usia 21.2 tahun, sedangkan wanita 17.3 tahun. M eskipun ada sekitar 10 % yang masih terus bertambah tinggi sampai usia 23.5 tahun (laki-laki) dan 21.2 tahun (wanita). Setelah itu, tidak lagi akan terjadi pertumbuhan bahkan justru akan cenderung berubah menjadi penurunan ataupun penyusutan yang dimulai sekitar umur 40 tahunan.
2 Jenis kelamin (sex), dimensi tubuh laki-laki umumnya akan lebih besar dibandingkan dengan wanita, terkecuali untuk beberapa bagian tubuh tertentu seperti pinggul, dsb.
3 Suku bansa (ethnic), setiap suku bangsa ataupun kelompok etnik memiliki karakteristik fisik yang akan berbeda satu dengan yang lainnya.
4 Posisi tubuh (posture), sikap ataupun posisi tubuh akan berpengaruh terhadap ukuran tubuh oleh sebab itu, posisi tubuh standar harus diterapkan untuk survei pengukuran. Dalam kaitan dengan posisi tubuh dikenal dua cara pengukuran, yaitu:
30
• Pengukuran dimensi struktur tubuh (structural body dimension)
• Pengukuran dimensi fungsional tubuh (functional body dimensions)
Selain faktor-faktor diatas tersebut masih ada pula faktor lain yang mempengaruhi variabilitas ukuran tubuh manusia seperti:
¾ Cacat tubuh, dimana data anthopometri disini akan diperluan untuk perancangan bagi orang-orang cacat (kursi roda, kaki/tangan palsu, dll)
¾ Tebal atau tipisnya pakaian yang harus dikenakan, dimana faktor iklim yang berbeda akan memberikan variasi yang berbeda pula dalam bentuk rancangan dan spesifikasi pakaian. Dengan demikian dimensi tubuh orangpun akan berbeda dari satu tempat dengan tempat yang lain.
¾ Kehamilan (pregnancy), dimana kondisi semacam ini jelas akan mempengaruhi bentuk dan ukuran tubuh (khusus wanita). Hal tersebut jelas memelukan perhatian khusus terhadap produk-produk yang dirancang bagi segmentasi seperti ini.
31
2.2.2 Biomekanika
M ekanika adalah salah satu cabang ilmu dari bidang ilmu fisika yang mempelajari gerakan dan perubahan bentuk suatu materi yang diakibatkan oleh gangguan mekanik yang disebut gaya. M ekanika adalah cabang ilmu yang tertua dari semua cabang ilmu dalam fisika. Tersebutlah nama-nama seperti Archimides (287-212 SM ), Galileo Galilei (1564-1642), dan Issac Newton (1642-1727) yang merupakan peletak dasar bidang ilmu ini. Galileo adalah peletak dasar analisa dan eksperimen dalam ilmu dinamika. Sedangkan Newton merangkum gejala-gejala dalam dinamika dalam hukum-hukum gerak dan gravitasi.
M ekanika teknik atau disebut juga dengan mekanika terapan adalah ilmu yang mempelajari peneraapan dari prinsip-prinpsip mekanika. M ekanika terapan mempelajari analisis dan disain dari sistem mekanik.
Biomekanika didefinisikan sebagai bidang ilmu aplikasi mekanika pada sistem biologi. Biomekanika merupakan kombinasi antara disiplin ilmu mekanika terapan dan ilmu-ilmu biologi dan fisiologi. Biomekanika menyangkut tubuh manusia dan hampir semua tubuh mahluk hidup. Dalam biomekanika prinsip-prinsip mekanika dipakai dalam penyusunan konsep, analisis, disain dan pengembangan peralatan dan sistem dalam biologi dan kedokteran.
32
Pada dasarnya biomekanika adalah cabang ilmu yang relatif baru dan sedang berkembang secara dinamis. Akan tetapi sebenarnya bidang ilmu sudah eksis sejak abad ke lima belas masehi ketika Leonardo Da Vinci (1452-1519) membuat catatan akan siginikansi mekanika dalam penelitian-penelitian biologi yang dia lakukan. Kontribusi dari para peneliti dalam bidang ilmu biologi, kedokteran, ilmu-ilmu dasar, dan teknik mewarnai perkembangan biomekanika akhir-akhir ini.
Pemodelan
Dibutuhkan asumsi-asumsi tertentu untuk membuat penyederhanaan dari sebuah sistem yang kompleks sehingga penyelesaian analitis bisa dicapai. Sebuah model yang lengkap memperhitungkan efek-efek dari keseluruhan bagian penyususn sistem secara detail. Akan tetapi model yang lengkap dan detail sulit diwujudkan dan bila dapat akan sulit menghasilkan solusi dari masalah yang akan diselesaikan. Tidak selalu mungkin untuk memodelkan sistem secara lengkap dan bahkan kadang-kadang tidak perlu untuk menyertakan setial detail dari sistem dalam analisis. Sebagai contoh adalah pada hampir semua gerakan tubuh manusia, banyak kelompok otot (muscle) yang terlibat untuk menggerakkan organ-organ tubuh. Akan tetapi untuk keperluan analisis gaya yang terlibat pada sendi dan otot pada suatu gerakan tertentu, pendekatan yang terbaik adalah dengan memprediksi kelompok otot yang mana yang paling aktif dan mengabaikan kelompok otot-otot yang lain.
33
Secara umum, pemodelan suatu sistem selalu diawali dengan model yang sederhana. Dari model sederhana ini berangsur-angsur kompleksitasnya ditingkatkan sejalan dengan pemahaman karakterstik system dan dari pengamatan terhdapa model sederhana tersebut. Peneliti dapat merancang model yang cukup sederhana untuk dianalisa sehingga menujukkan fenomena yang diteliti dalam batas-batas kepuasan tertentu. Dari pengetahuan akan sistem yang dimodelkan sistem sederhana terseebut kemudian disempurnakan. M akin banyak belajar, makin banyak pula yang dipahami dari sistem dan lebih detail pula analisis yang dapat dilakukan.
Pemodelan gerakan tubuh manusia dapat digolongkan berdasarkan pendekatan yang diambil:
• Pendekatan teori yang menggunkan basis pengetahuan dalam bidang fisiologi, mekanika, dan robotika untuk merancang persamaan matematika yang mengepresikan gerakan tubuh manusia. Selanjutnya gait dapat dipelajari dengan simulasi menggunakan model tersebut dan hasilnya dibandingkan dengan data asli yang diukur dari manusia.
• Pengukuran gait secara langsung untuk mendapatkan model yang representatif menggambarkan hubungan antar variabel dalam gerakan tubuh manusia. Biasanya dimodelkan dengan cara direkam dengan menggunakan handycam atau alat perekam lain. Cara pengambilan gambarnyapun ada 2 cara yaitu right sagital view, adalah pengambilan
34
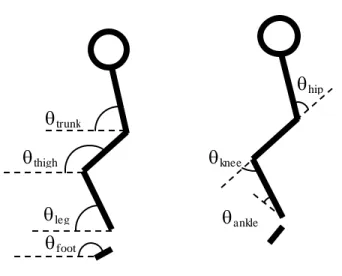
θhip
θknee
θankle
gambar dari sisi kanan model dan left sagital view, adalah pengambilan gambar dari sisi kiri model.
Gambar 2.1 Posisi Anatomi untuk segment angles dan relative angles dengan right
sagital view
Gambar 2.2 Posisi Anatomi untuk segment angles dan relative angles dengan
θtrunk θthigh θleg θfoot θhip θknee θankle θtrunk θthigh θleg θfoot
35
Relative angles (joint angles) adalah sudut antara garis yang membujur dari
dua ruas tubuh yang berdekatan sedangkan absolute angles (segment angles) sudut antara ruas tubuh dan garis vertikal atau horizontal.
Berdasarkan Canadian Society of Biomechanics perhitungan untuk joint
angles right sagital view dan joint angles right sagital view dapat juga dihitung
dengan menggunakan rumus:
trunk thigh hip =θ −θ θ leg thigh knee =θ −θ θ o 90 leg foot ankle =θ −θ − θ 2.2.3 Linear Kinematics
Kinematics adalah ilmu yang mempelajari gerak tanpa memperdulikan
penyebab timbulnya gerak. Dalam gerak , terdapat besaran vektor dan besaran skalar. Besaran vektor didefinisikan sebagai besaran yang memiliki arah dan nilainya, contohnya adalah kecepatan (velocity), percepatan (accelerations), dan perpindahan (displacement). Biasanya besaran vektor digambarkan dengan menggunakan panah dimana panjang dari panah tersebut dapat diartikan sebagai jarak dan ujung dari panah tersebut adalah arah dari gerak tersebut. Sedangkan besaran skalar cukup didefinisikan dari besarnya (nilainya) saja tanpa perlu memperhatikan arahnya,
36
θ
c a b
contohnya adalah massa (mass), kelajuan (speed), volume, jarak (distance) dan waktu (time). Untuk menghitung itu semua dapat digunakan rumus trigonometri seperti dibawah ini: 2 2 b a c= + ) b / a arctan( = θ a = c sin θ b = c cos θ dimana: a = opposite side b = adjacement side c = hypotenuse θ = an internal angles
37
b
a c
Di dalam kinematics terdapat tiga variabel utama, yaitu: • Posisi (position)
Posisi adalah adalah letak suatu benda pada suatu waktu tertentu terhadap suatu acuan tertentu. Perubahan posisi suatu benda dapat dideskripsikan sebagai jarak (length) atau perpindahan (displacement). Jarak adalah panjang lintasan yang ditempuh oleh suatu benda dalam selang waktu tertentu.
a + b = jarak = L
Sedangkan perpindahan adalah perubahan kedudukan suatu benda dalam selang waktu tertentu. (Ds= sf - si) dimana:
sf = posisi akhir ; si = posisi awal
Jarak (leght) dan perpindahan (displacement) memiliki satuan yang sama yaitu: cm, km, m, in, ft, mi.
• Kecepatan (velocity)
Kecepatan (velocity) adalah besaran yang tergantung pada arah. Untuk gerak dalam satu dimensi arah kecepatan dapat dinyatakan dengan tanda
38 waktu n perpindaha t t S S t s ) v tan( Kecepa i f i f = − − = Δ Δ =
Satuan yang dipakai dalam kecepatan (velocity) adalah m/s, km/jam, ft/s, dsb.
Terdapat pula kelajuan (speed), adalah besaran yang tidak bergantung pada arah, sehingga kelajuan termasuk dalam besaran skalar.
waktu n perpindaha s=
Satuan yang dipakai dalam menghitung kelajuan sama dengan satuan dalam menghitung kecepatan.
• Percepatan (accelerations)
Percepatan adalah rata – rata perubahan dari kecepatan terhadap suatu acuan waktu. Percepatan adalah besaran vektor, dimana memiliki satuan m/s/s atau m/s². i f i f t t v v t v ) a tan( percepa − − = Δ Δ =
39
2.2.4 Angular Kinematics
Untuk menjelaskan gerak partikel sepanjang suatu lintasan melingkar, kita perlu suatu koordinat untuk mengukur sudut. Jika pada bidang XY posisi sebuah titik dinyatakan oleh pasanagn korrdinat (x,y), maka posisi sebuah titik dalam gerak melingkar dinyatakan oleh koordinat polar (r,θ) dengan r adalah jari-jari lingkaran dan adalah perpindahan sudut. Karena r tetap, maka yang menentukan posisi partikel yang bergerak adalah koordinat . Sudut yan diukur berlawanan dengan arah jarum jam adalah bernilai positif, dan sudut yang diukur searah dengan jarum jam adalah bernilai negatif.
Dalam linear kinematics atau gerak lurus terdapat tiga variabel utama, yaitu perpindahan, kecepatan dan percepatan. Dalam angular kinematics atau gerak melingkar terdapat juga tiga variabel utama, yaitu perpindahan sudut (angular
displacement), kecepatan sudut (angular velocity) dan percepatan sudut (angular accelerations).
• Perpindahan sudut (angular displacement)
Perpindahan sudut (angular displacement) adalah posisi akhir sudut dikurangi dengan posisi awal dari sudut tersebut.
i f −θ
θ = θ
40
• Kecepatan sudut (angular velocity)
Kecepatan sudut (angular velocity) adalah rata-rata perubahan dari posisi sudut, dapat juga diindikasikan sebagai seberapa cepat sudut tersebut berubah. Kecepatan sudut (angular velocity) memiliki satuan yaitu rad/s atau degrees/s. Kecepatan sudut (angular velocity) dapat dihitung dengan menggunakan rumus : t Δ θ Δ = ω
• Percepatan sudut (angular accelerations)
Percepatan sudut (angular accelerations) adalah rata-rata perubahan dari kecepatan sudut (angular velocity). Dapat diartikan juga sebagai seberapa cepat perubahan dari kecepatan sudutnya. Tanda dari Percepatan sudut (angular accelerations) tergantung dari arah rotasi. Satuan yang dipakai dalam percepatan sudut (angular accelerations) adalah rad/s² atau
degrees/s². t Δ ω Δ = α
41
Di dalam angular kinematics dapat digunakan untuk menghitung menghitung relative
angles (joint angles) dan absolute angles (segment angles).
• Absolute (segment) dapat dikalkulasikan atau dihitung dari posisi akhir koordinat tubuh dengan menggunakan arctangent (inverse tangent).
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = θ adj opp arctan opp = y2 – y1 adj = x2 – x1
• Sedangkan Relative Angles (Joint Angles) dapat dihitung dengan dua cara yaitu : 1. M enggunakan aturan cosinus, digunakan apabila diketahui panjang ruas
tubuh. ) (cos ab 2 b a c2 = 2 + 2 − θ
(
) (
)
2 2 3 2 2 3 x y y x a= − + −(
) (
)
2 1 2 2 1 2 x y y x b= − + − θ opp adj (x1,y1) ) (x2,y2) θ (x1,y1) (x2,y2) a b c (x3,y3)42
θ
1θ
2θ
3(
) (
)
2 1 3 2 1 3 x y y x c= − + −2. M enghitung dari dua absolute angles, digunakan apabila sudah diktahui
absolute angles. ) 180 ( 2 1 3 =θ + −θ θ 2.3 Anatomi Tubuh 2.3.1 Muscle (otot)
Muscle (otot) berfungsi sebagi motor penggerak dari tubuh manusia, otot juga
bertanggung jawab atas bergeraknya sistem rangka tubuh manusia, untuk menjaga posisi dan postur tubuh manusisa, dan memantapkan posisi persendian manusia. Otot hanya dapat menarik, dan juga harus melewati pesendian manusia untuk dapat melakukan sebuah gerakan pada tubuh manusia. Berdasarkan Canadian Society of
Biomechanics (sumber: www.csb.com) otot yang terkuat untuk menopang tubuh
manusia adalah otot kaki. Otot juga dapat menjadi pendek sampai 70% dari dari panjang otot itu sendiri. Otot juga ada beberapa macam diantaranya adalah:
43
1. Otot polos , gerakan tak disadari (INVOLUNTER)
2. Otot lurik = serat lintang gerakan disadari (VOLUNTER) 3. Otot jantung = gerakan tidak disadari.
Gambar 2.3 Otot M anusia
Otot juga memiki karakteristik seperti:
1. Irritability, kemampuan menerima rangsang dari syaraf.
2. Contractibility, Kemampuan untuk memendek (50-70%), biasanya terbatas tergantung pada gerakan yang akan dilakukan oleh persendian manusia.
3. Extensibility, adalah kemampuan untuk memanjang atau mengulur.
4. Elasticity, kemampuan otot untuk kembali ke bentuk atau ukuran semula setelah otot memanjang.
44
2.3.2 Sendi (Joint)
Sendi juga merupakan suatu engsel yang membuat anggota tubuh dapat
bergerak dengan baik, juga merupakan suatu penghubung antara ruas tulang yang satu dengan ruas tulang lainnya, sehingga kedua tulang tersebut dapat digerakkan sesuai dengan jenis persendian yang diperantarainya.
Beberapa komponen penunjang sendi:
• Kapsula sendi adalah lapisan berserabut yang melapisi sendi. Di bagian dalamnya terdapat rongga.
• Ligamen (ligamentum) adalah jaringan pengikat yang mengikat luar ujung tulang yang saling membentuk persendian. Ligamentum juga berfungsi mencegah dislokasi.
• Tulang rawan hialin (kartilago hialin) adalah jaringan tulang rawan yang menutupi kedua ujung tulang. Berguna untuk menjaga benturan.
• Cairan sinovial adalah cairan pelumas pada kapsula sendi.
45
Sendi memiliki beberapa jenis, yaitu:
Sinartrtosis adalah persendian yang tidak memperbolehkan pergerakan. Dapat
dibedakan menjadi dua, yaitu:
• Sinartrosis sinfibrosis: sinartrosis yang tulangnya dihubungkan jaringan ikat fibrosa. Contoh: persendian tulang tengkorak.
• Sinartrosis sinkondrosis: sinartrosis yang dihubungkan oleh tulang rawan. Contoh: hubungan antarsegmen pada tulang belakang.
Amphiatrosis adalah sendi kartilago dengan yang memungkinkan terjadinya gerakan.
Diartrosis adalah persendian yang memungkinkan terjadinya gerakan. Dapat
dikelempokkan menjadi:
• Sendi peluru: persendian yang memungkinkan pergerakan ke segala arah. Contoh: hubungan tulang lengan atas dengan tulang belikat.
• Sendi pelana: persendian yang memungkinkan beberapa gerakan rotasi, namun tidak ke segala arah. Contoh: hubungan tulang telapak tangan dan jari tangan. • Sendi putar: persendian yang memungkinkan gerakan berputar (rotasi). Contoh:
hubungan tulang tengkorak dengan tulang belakang I (atlas).
• Sendi luncur: persendian yang memungkinkan gerak rotasi pada satu bidang datar. Contoh: hubungan tulang pergerlangan kaki.
46
• Sendi engsel: persendian yang memungkinkan gerakan satu arah. Contoh: sendi siku antara tulang lengan atas dan tulang hasta.
Gambar 2.5 Jenis-jenis Sendi (Joint)
2.3.3 Siku (Elbow).
Siku merupakan salah satu bagian dari lutut. Gangguan fungsi siku ini, bisa diakibatkan oleh aktifitas/pekerjaan yang pasif, yang bertumpu pada otot-otot lengan. M isalnya, pekerjaan yang monoton seperti melukis, menulis, dan mengetik. Gangguan ini lebih bersumber pada lengan bawah, yakni sisi luar di bawah sendi siku. Berdasarkan catatan saya selama 27 tahun bekerja sebagai juru pijat, penyakit ini banyak menggangu pekerja wanita yang berusia antara 25-40 tahun. Tetapi, kaum priapun dapat terganggu oleh penyakit ini, khususnya untuk mereka yang pekerjaannya berkaitan dengan angkat berat, penggemar olahraga tenis dan golf, misalnya. Penyakit ini ditandai dengan adanya rasa nyeri dan sakit pada siku lengan.
47
Gambar 2.6 Susunan Siku M anusia
Siku manusia terdiri dari humerus, ulna, dan radius. Dalam siku manusia juga terdapat radioulnar joint yang fungsinya dapat memutar siku. Berikut ini adalah otot yang terdapat pada siku manusia.
Gambar 2.7 Otot Pada Siku M anusia hum erus ulna
radius Upper Extremity Bones
biceps
brachioradiali
anconeus
48
2.3.4 Pergelangan Tangan dan Tangan (Wrist and Hand)
Dalam anatomi tubuh manusa, pergelangan tangan adalah sambungan antara lengan bagian atas dan telapak tangan. Pergelangan tangan tersusun atas dua tulang pendek, yang disebut carpals.
Gambar 2.8 Susunan Pergelangan Tangan M anusia
Dalam pergelangan tangan manusia terdapat dua sendi yang menghubungkan lengan lengan bagian atas dan telapak tangan yaitu radiocarpal joint dan distal
radioulnar joint.
2.3.5 Tulang Punggung (Spine)
Dalam tubuh manusia ada susunan tulang yang memanjang dari leher sampai ke selangkangan. Susunan tulang tersebut dinamakan Tulang Belakang. Tulang belakang terdiri dari susunan 33 ruas tulang yang masing-masing memiliki nama
Carpals Metacarpals Phalanges P M D I II III IV V Radiocarp al Joint Distal Radioulnar Joint Radiocarp al Joint Radiocarp al Joint Radiocarp al Joint Carpals Radiocarp al Joint Metacarpals Carpals Radiocarp al Joint
49
antaranya bergabung membentuk bagian sacral, dan 4 tulang membentuk tulang ekor (coccyx). Tiga bagian di atasnya terdiri dari 24 tulang yang dibagi menjadi 7 tulang cervical (leher), 12 tulang thorax (thoraks atau dada) dan, 5 tulang lumbar. Banyaknya tulang belakang dapat saja terjadi ketidaknormalan. Bagian terjarang terjadi ketidaknormalan adalah bagian leher.
Di dalam susunan tulang tersebut terangkai pula rangkaian syaraf-syaraf, yang bila terjadi cedera di tulang belakang maka akan mempengaruhi syaraf-syaraf tersebut.
50
Tulang belakang juga dilapisi oleh otot yaitu otot spinalis.
Gambar 2.10 Otot Spinalis Pada Tulang Belakang
Sebuah tulang punggung terdiri atas dua bagian yakni bagian anterior yang terdiri dari badan tulang atau corpus vertebrae, dan bagian posterior yang terdiri dari arcus
vertebrae. Arcus vertebrae dibentuk oleh dua "kaki" atau pediculus dan dua lamina,
serta didukung oleh penonjolan atau procesus yakni procesus articularis, procesus transversus, dan procesus spinosus. Procesus tersebut membentuk lubang yang disebut foramen vertebrale. Ketika tulang punggung disusun, foramen ini akan membentuk saluran sebagai tempat sumsum tulang belakang atau medulla spinalis. Di antara dua tulang punggung dapat ditemui celah yang disebut foramen
intervertebrale.
Tulang punggung cervical
Secara umum memiliki bentuk tulang yang kecil dengan spina atau procesus spinosus (bagian seperti sayap pada belakang tulang) yang pendek, kecuali tulang ke-2 dan 7
s
51
C7 (C dari cervical), namun beberapa memiliki sebutan khusus seperti C1 atau atlas, C2 atau aksis. Setiap mamalia memiliki 7 tulang punggung leher, seberapapun panjang lehernya.
Tulang punggung thorax
Procesus spinosusnya akan berhubungan dengan tulang rusuk. Beberapa gerakan memutar dapat terjadi. Bagian ini dikenal juga sebagai 'tulang punggung dorsal' dalam konteks manusia. Bagian ini diberi nomor T1 hingga T12.
Tulang punggung lumbar
Bagian ini (L1-L5) merupakan bagian paling tegap konstruksinya dan menanggung beban terberat dari yang lainnya. Bagian ini memungkinkan gerakan fleksi dan ekstensi tubuh, dan beberapa gerakan rotasi dengan derajat yang kecil.
Tulang punggung sacral
Terdapat 5 tulang di bagian ini (S1-S5). Tulang-tulang bergabung dan tidak memiliki celah atau diskus intervertebralis satu sama lainnya.
Tulang punggung coccygeal
Terdapat 3 hingga 5 tulang (Co1-Co5) yang saling bergabung dan tanpa celah. Beberapa hewan memiliki tulang coccyx atau tulang ekor yang banyak, maka dari itu