JREC
Journal of Electrical and Electronics Vol. 3 No. 2
RANCANG BANGUN SISTEM KONTROL MESIN INDUSTRI
MENGGUNAKAN MOTOR AC SEBAGAI SERVO POSISI
BERBASIS PLC
Aeri Sujatmiko
Program Studi Teknik Elektro
Fakultas Teknik Universitas Islam
“
45
”
Bekasi
Jl. Cut Meutia No. 83 Bekasi, Indonesia
Telp. 021-88344436, 021-8802015 Ext. 124
Email: [email protected]
ABSTRAK
Pada penelitian ini pengendali servo posisi dan kecepatan menggunakan motor AC induksi phasa tiga menggunakan motor induksi AC phasa tiga 200 Watt/200 V AC, inverter Mitsubishi Freqroll A500, dan encoder NSD type MRE-G320SP. PLC yang digunakan PLC Mitsubishi Seri Q CPU, dan untuk interface touch panel menggunakan touch panel proface GP 5771 T. Pengujian nilai presisi dan linier menggunakan metode gage linearity dan bias study. Dari hasil pengujian didapat prosentase nilai linearitas berkisar 0,1 % sampai dengan 1,2 %. Dan pengujian presisi untuk gerak linier diperoleh 8,34 %. Sedangkan besarnya nilai penyimpangan atau nilai deviasi jarak posisi dengan kecepatan motor dengan frekuensi yang bervariasi dari 20 Hz sampai dengan 40 Hz berkisar antara 0,43% sampai dengan 5,41%.
Kata kunci : Programmable Logic Control, Servo Posisi, PLC-Q series, GX developer, GPP Pro PB III
PENDAHULUAN
Dalam menghadapi persaingan dan mempertahankan kelangsungan perusahaan, dibutuhkan penekanan biaya produksi. Salah satu cara untuk menekan biaya produksi adalah dengan menggantikan tenaga manusia digantikan tenaga mesin. Dalam penggantian mesin juga perlu dilakukan alokasi dana dan alokasi peralatan dengan fungsi atau sistem yang sama, tetapi biaya lebih rendah.
Salah satu upaya untuk menggantikan kerja manusia adalah dengan mengganti sistem kerja mesin yang awalnya dikerjakan sepenuhnya oleh manusia digantikan dengan full mesin atau bisa juga dikendalikan dengan semi auto.
Seiring dengan perkembangan teknologi sistem kendali didunia industri, sistem pengontrolan dan monitoring mulai diambil alih oleh alat kendali untuk menggantikan pekerjaan manual yang penuh resiko tersebut. Salah satunya adalah sistem pengendali dengan menggunakan Programmable Logic Control
(PLC).
Dalam proses produksi untuk mendapatkan mesin yang memiliki akurasi untuk memperoleh gerakan yang akurat biasanya menggunakan servo motor sebagai penggerak servo posisi. Karena dengan servo motor selain akurat juga memliki torsi yang besar, namun harganya juga cukup mahal. Maka pada penelitian ini servo posisi dapat digantikan dengan menggunakan motor induksi AC phase tiga. Dengan menggunakan PLC dan tambahan modul khusus AC Motor dapat digunakan untuk servo posisi.
LANDASAN TEORI
PLC (Programabble Logic Controller)
JREC
Journal of Electrical and Electronics Vol. 3 No.2
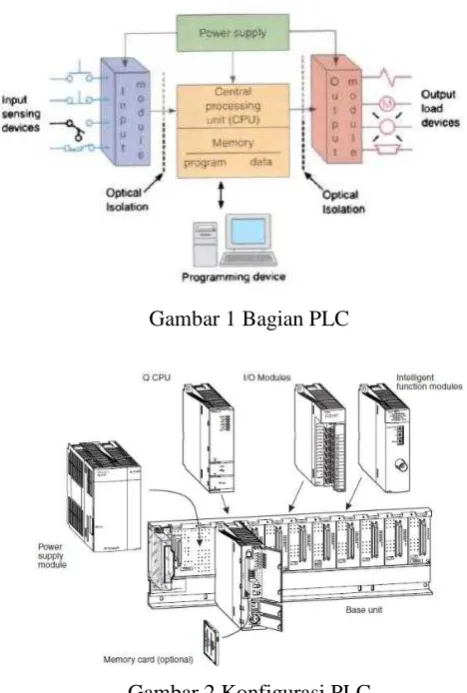
Gambar 1 Bagian PLC
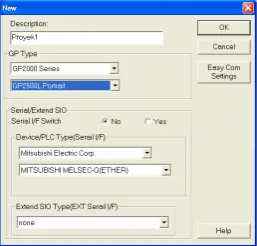
Gambar 2 Konfigurasi PLC
Umumnya, sebuah sistem PLC memiliki lima komponen dasar, yaitu; 1. Unit prosesor atau central processing unit (unit pengolahan pusat) 2. Unit catu daya
3. Perangkat pemograman dipergunakan untuk memasukkan program yang dibutuhkan didalam memori.
4. Unit memori adalah tempat dimana program yang digunakan untuk melaksanakan tindakan-tindakan pengontrolan oleh mikroprosesor disimpan.
5. Bagian masukan dan keluaran adalah antarmuka dimana prosesor menerima informasi dari dan mengkomunikasikan informasi kontrol ke perangkat-perangkat eksternal.
PLC yang digunakan dalam penelitian ini ini adalah PLC Seri Q Mitsubishi yang penjelasannya dapat di bagi menjadi dua bagian yaitu perangkat keras (hardware) dan perangkat lunak (software).
HardwarePLC Seri Q Mitsubishi
Bagian –bagian perangkat keras dari PLC Seri Q Mitsubishi antara lain :
Chasis I/O, adalah tempat atau chasing dimana modul input (masukan) dan modul output (keluaran) berada.
CPU Q06 H CPU, komponen ini merupakan segmen pengolah dari keseluruhan bagian dan unsur-unsur yang terlibat dalam sistem pengontrolan.
Modul I/O, yaitu piranti masukan dan keluaran (modul masukan dan keluaran).
Power Supply, yaitu sumber yang digunakan untuk mencatu daya keseluruhan rangkaian PLC mulai dari prosesor sampai ke modul masukan dan keluaran.
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Modul Sensor Posisi, merupakan komponen untuk menerima data dari sensor posisi atau encoder dan menghasilkan data untuk diproses menjadi gerak yang linier.
Kabel Komunikasi untuk Programming.
1. Base Unit Mitsubhisi Q38 B
Base Unit adalah tempat untuk menempatkan Power Supply, CPU, Modul I/O, special modul dan perangkat antarmuka yang digunakan. Pada Base unit tipe Q38B terdapat tujuh slot.
Gambar 3 Mounting Base Unit tipe Q38B
2. Power Supply Unit Q62P
Power Supply berfungsi untuk menyediakan sumber listrik untuk CPU, Modul I/O, ataupun Modul khusus.
Gambar 4 Power Supply Unit tipe Q62P
3. Central Processing Unit (CPU) tipe Q06HCPU
CPU berisi microcontroller yang berfungsi untuk melaksanakan atau eksekusi suatu program membaca dan menyimpan data ke memori, komunikasi dengan peralatan lain dan sebagai proses pengolahan data.
Gambar 5 Unit CPU tipe Q06H CPU
4. Unit masukan type QX41
Modul input QX41 difungsikan sebagai interface antara PLC dan peralatan masukan, dan perubahan data masukan selanjutnya diproses oleh CPU
Gambar 6 Modul Input Unit type QX41 5. Modul keluaran Unit type QY41
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Gambar 7 Modul Output Unit type QY41
6. Blok Terminal tipe A6TBXY36
Blok terminal adalah tempat sebagai penghubung antara PLC dengan peralatan masukan maupun peralatan keluaran. Unit ini hanya berupa terminal blok.
Gambar 8 Terminal Blok A6TBXY36
7. Modul Khusus VS-Q62
Modul VS-Q62 ini dapat digunakan untuk mendeteksi posisi secara otomatis dari suatu mesin konveyor, mesin press, mesin pengepakan dan lain-lain. Masukan modul ini berupa pulsa data dari absocoder, dari data pulsa ini diolah oleh PLC. Blok diagram dari Modul VS-Q62 ditunjukkan seperti pada gambar berikut:
Gambar 9 Konfigurasi Modul VS Q62
Software
Software menggunakan GX Developer Ver 8
GX developer Ver 8
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Gambar 10 Tampilan awal GX Developer Ver 8
Instruksi Pemrograman PLC
Instruksi-instruksi tersebut antara lain: 1. Instruksi MOV
Instruksi MOV digunakan untuk memindahkan data sebesar 16 bit dari satu area memori yang diberi simbol S (Sumber) ke area memori lain yang diberi sombol D (Tujuan).
Gambar 11 Instruksi MOV
2. Instruksi DMOV
Instruksi DMOV digunakan untuk memindahkan data sebesar 32 bit satu area memori yang diberi simbol S (Sumber) ke area memori lain yang diberi sombol D (Tujuan).
Gambar 12 Instruksi DMOV
3. Instruski MOVP
Instruksi MOVP digunakan untuk memindahkan data sebesar 16 bit dari satu area memori yang diberi simbol S (Sumber) ke area memori lain yang diberi sombol D (Tujuan). Instruksi ini hanya melukukan satu kali eksekusi.
Gambar 13 Instruksi MOVP
4. Instruksi DMOVP
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Gambar 14 Instruksi DMOVP
5. Instrusksi TO
Instruksi TO digunakan untuk menulis atau mengirim data sebesar 16 bit ke Buffer Memory pada Modul VS-Q62.
Gambar 15 Instruksi TO
N3 : Jumlah data yang akan dikirim
6. Instruksi TOP
Instruks TOP digunakan untuk menulis atau mengirim data sebesar 16 bit ke Buffer Memory pada modul VS-Q62. Tetapi hanya untuk satu kali siklus.
Gambar 16 Instruksi TOP
7. Instruksi FROM
Instruksi FROM digunakan untuk membaca data sebesar 16 bit dari buffer memory VS-Q62 yang kemudian ditampilkan ke buffer memori tujuan.
Gambar 17 Instruksi FROM
GPP PRO/PB3 for Windows
GPP Pro/PB3 for windows adalah sebuah perangkat lunak yang berfungsi untuk membuat sebuah antarmuka agar seluruh sistem pada PLC dapat dikendalikan dan dimonitor oleh antarmuka tersebut.
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Node window
Tujuan untuk mengkonfigurasi awal node ini agar PLC yang akan dipakai selama proses pengontrolan akan dikenali. Ini sangat penting karena PLC selama bekerja akan selalu berkomunikasi dengan perangkat lunak ini melalui antarmuka yang telah dibuat.
Gambar 19 Tampilan jendela Node
Tag Database
Tag atau pelabelan instruksi merupakan inti dari perangkat lunak antarmuka ini, karena kesalahan penggunaan tagname dapat mengakibatkan operasi program menjadi tidak normal dan bahkan mengalami kesalahan (error).
Gambar 20 Tampilan jendela Tag Database
Beberapa tipe label yang dapat dibuat adalah sebagai berikut ;
Digital tags
Analog tags
String tags
Display Window
Pada jendela Display akan diberikan keleluasan kepada programmer agar membuat antarmuka sesuai yang diperlukan.
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Sensor Posisi Putar Absocoder MRE-G320SP
Absocorder merupakan sensor posisi putar, Sensor absocoder ini merupakan sensor posisi secara magnetic yang dapat menggantikan encoder yang selama ini banyak dipakai
Gambar 22 Dasar dari encoder
Absocoder terdiri dari dua komponen utama, yaitu sensor berupa magnetic yang akan mendeteksi perubahan dari suatu gerakan linier atau putaran, dan yang kedua yaitu converter, yang akan merubah sinyal keluaran menjadi sebuah data.
Gambar 23 Absocoder MRE G320 SP
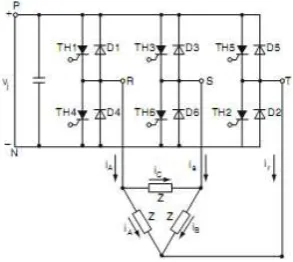
Inverter
Salah satu aplikasi Inverter adalah untuk mengendalikan kecepatan putaran motor AC. pengaturan frekuensi bisa di atur oleh sinyal dari luar seperti tegangan 0-5V, 0-10V, ataupun arus 4-20mA.
Gambar 24 Rangkaian dasar inverter dengan SCR
Bahasa dan Logika Pemrograman PLC
PLC memiliki bermacam-macam bahasa program standart yang ditetapkan oleh (International Electrotecnic Commission) IEC 61131-3, ada 5 bahasa pemrograman PLC yaitu:
a. Ladder Diagram (LD)
b. Function Block Diagram (FBD) c. Structured Text (ST)
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Servo Motor
Servomechanism disingkat servo adalah suatu alat yang digunakan untuk memberikan kontrol mekanik pada jarak dan posisi.
Gambar 25 kontrol posisi dengan servo motor
Jenis motor servo ada 4, yaitu : 1. DC servo motor
2. AC servo motor 3. Stepping servo Motor 4. Elektrohydrolik servo motor
METODOLOGI PENELITIAN
Deskripsi Rancangan dan Tempat Penelitian.
Pada penelitian ini dibuat satu perangkat yang mewakili dari satu bagian pada mesin. Diagram blok dari sistem ditunjukan seperti pada gambar 26. Prinsip kerja secara umum adalah sebagai berikut:
DRIVER MOTOR
Gambar 26 Blok Diagram dari Sistem Servo Posisi
Pada penelitian ini gerak mekanis untuk menunjukkan posisi yang presisi digerakkan oleh sebuah motor induksi phasa tiga. Data dari touch panel dioleh oleh PLC. PLC mengirimkan perintah ke inverter untuk menggerakan motor. Kecepatan motor diatur oleh tegangan yang masuk ke inverter yang berasal dari analog output PLC, berupa tegangan 0 – 5 V DC.
Metode dalam Penelitian
Langkah-langkah penelitian yang dilakukan sebagai berikut:
a. Membuat as atau shaft sebagai sumbu pergerakan posisi dari suatu meja, as atau shaft yang ditetapkan adalah memiliki panjang 300 mm dengan diameter 10 mm dan lebar ulir 1 mm. b. Menentukan nilai posisi pada interface touch panel dengan nilai antara 0 sampai dengan 150 mm. c. Menentukan nilai pengaturan kecepatan motor induksi phase tiga, dengan nilai antara 0 rpm sampai
dengan 1500 rpm.
d. Menentukan tegangan keluaran modul analog output PLC sebagai masukan tegangan pada inverter, sebesar 0 sampai dengan 5 Volt.
e. Melakukan pengukuran kecepatan motor dengan tachometer. f. Melakukan pengukuran gerakan linier dari motor induksi phase tiga.
JREC
Journal of Electrical and Electronics Vol. 3 No.2
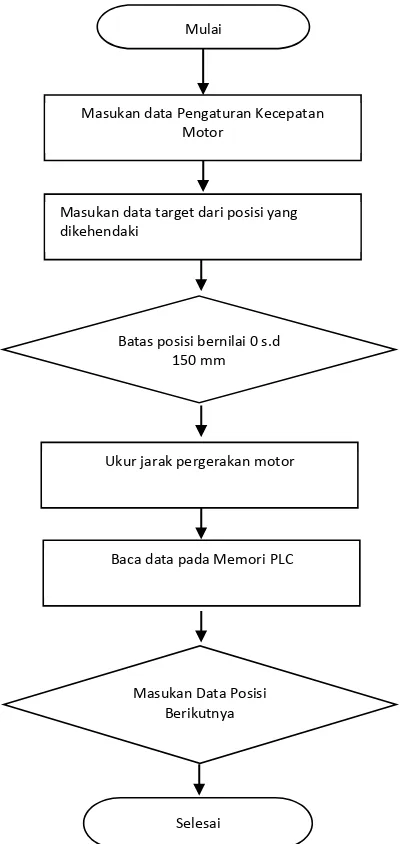
Langkah-langkah metode penelitian dijelaskan pada gambar 27 Flow Chart Penelitian, sebagai berikut:
Gambar 27 Flow Chart Penelitian Perencanaan Sistem
Dalam pembuatan ini meliputi perancangan mekanik, perancangan perangkat keras, dan perancangan perangkat lunak.
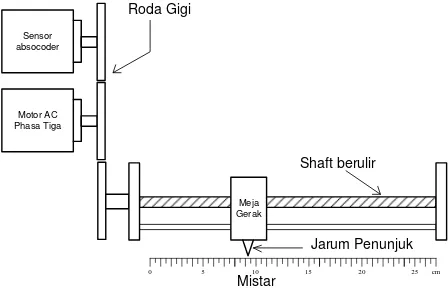
Perencanaan Mekanik
Secara garis besar pada perencanaan mekanik terdiri dari tiga bagian, yaitu:
1. Roda gigi, berfungsi sebagai penghubung atau kopling antara motor dengan shaft berulir dan sensor
putaran absocoder. Terdiri dari tiga roda gigi yang masing-masing memiliki diameter roda gigi 10 mm, dengan jumlah gigi 64. Untuk mendapatkan perbandingan yang sama, ketiga roda gigi dibuat dengan perbandingan 1:1:1.
2. Shaft berulir, berfungsi untuk mengarahkan gerakan meja penunjuk. Shaft dibuat dengan diameter
10 mm dan panjang 300 mm. Celah atau pitch dari ulir dibuat sebesar 1 mm, sehingga saat ulir berputar satu putaran pergeseran dari meja ukur sebesar 1 mm.
Selesai Mulai
Masukan data Pengaturan Kecepatan Motor
Masukan data target dari posisi yang dikehendaki
Batas posisi bernilai 0 s.d 150 mm
Ukur jarak pergerakan motor
Baca data pada Memori PLC
JREC
Journal of Electrical and Electronics Vol. 3 No.2
3. Mistar atau penggaris, berfungsi sebagai alat pengukur jarak pergeseran yang ditentukan.
Sensor absocoder
Motor AC Phasa Tiga
Meja Gerak
5 10 15 20 25
0 cm
Roda Gigi
Jarum Penunjuk Shaft berulir
Mistar
Gambar 28 Meja Gerak dan shaft berulir untuk gerak posisi
Perencanaan Perangkat Keras
Pada perencanaan perangkat keras ini secara garis besar dibagi menjadi lima bagian, yaitu: 1. PLC, digunakan sebagai rangkaian pengendali antara motor dan mengolah data masukan dari
inteface touch panel.
2. Interface Touch panel, digunakan sebagai masukan data posisi dan menampilkan data posisi. 3. Inverter, digunakan untuk penggerak motor AC phasa tiga. Dengan inverter kecepatan putaran
motor bisa diatur.
4. Motor AC, sebagai penggerak shaft berulir untuk menggerakan meja.
5. Sensor Posisi Absocoder, digunakan untuk mendeteksi posisi dari meja gerak posisi.
1. Rangkaian Penggerak Motor AC Phasa Tiga dengan Inverter
Menggunakan komponen pemutus dan pengaman MCB Merk Mitsubishi Type : NF 30 CS 5 A. Menggunakan komponen magnetic kontaktor SN 11 20 A, dan inverter Mitsubishi Freqrol A500 dengan kapasitas 0,75 KW. Motor yang digunakan motor phasa tiga dengan daya 0,2 KW.
Gambar 29 Pengendali Motor AC dengan inverter
2. Rangkaian Pengendali dengan PLC
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Gambar 30 Rangkaian Kontrol dengan PLC
Komponen-komponen yang digunakan pada rangkaian control antara lain:
1.
Komponen PLC, menggunakan tipe seri Q dari Mitsubishi, terdiri dari :a. Power Supply, memiliki tegangan masukan 100-240 V AC dan tegangan keluaran 24 V DC. Tipe yang digunakan Q62P.
b. CPU, menggunakan tipe Q06H-CPU.
c. Modul sensor posisi, menggunakan tipe VS-Q62. d. Modul output relay, menggunakan tipe QY40P.
e. Modul interface touch panel, menggunakan tipe QJ71C24. f. Modul input, menggunakan tipe QX41-S1.
g. Modul analog output, menggunakan tipe QX68-DAV.
2.
Sensor Posisi, digunakan untuk mendeteksi putaran. Merupakan jenis encoder increment. Tipe yang digunakan adalah Absocoder NSD MRE-G320SP. Tipe ini memiliki 320 pulsa per putaran.3.
Interface Touch panel, digunakan sebagai masukan data untuk target dari posisi yang diinginkan, dan memonitor nilai posisi. Menggunakan touch panel merk Proface tipe GP577R.4.
Relay, digunakan sebagai sinyal on, off, dan pengereman untuk motor. Relay yang digunakan tipe HC4 DC 24 dari Matsushita.Perencanaan Perangkat Lunak
Dalam perencanaan perangkat lunak ini ada dua perencanaan yang dibuat yaitu pemrograman untuk control PLC yaitu dengan software GX Developer Ver 8 dari Mitsubishi dan pemrograman untuk membuat interface pada touch panel, yaitu dengan menggunakan software GPP Pro III.
1. Pemrograman PLC dengan GX developer
Pada pemrograman PLC ini menggunakan bahasa pemrograman sesuai standard dari IEC 61131-3 yaitu menggunakan SFC (Sequence Funtion Chart). Perancangan dengan pemrograman SFC disini sekaligus menguji apakah PLC jenis seri Q ini dapat diprogram dengan standart dari IEC 61131-3 yaitu dengan SFC.
2. Pemrograman Interface Touch Panel dengan GPP Pro III
Pemrograman untuk interface pada touch panel menggunakan software GPP Pro III dari Proface. Pemrograman interface untuk touch panel ini, dibuat untuk menjalankan motor, memasukan data gerakan posisi dan menampilkan data gerakan posisi.
Pengujian Gerakan Posisi
Gerakan posisi, ditentukan dengan memasukan data input pada touch screen dengan nilai 0 – 150 mm. Nilai gerakan posisi diukur dengan mistar atau penggaris.
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Gambar 31 Pengukuran Pergerakan Meja Posisi dengan Mistar
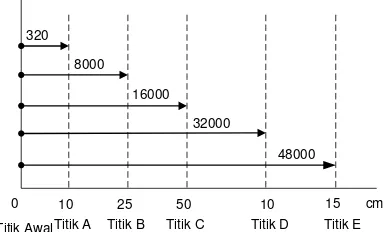
Pada penelitian ini pengaturan posisi menggunakan method absolute, artinya target dari posisi yang dikehendaki mengambil referensi dari titik awal atau titik nol. Dalam pengujian ini dilakukan lima target posisi yang ingin dicapai yaitu titik A dengan jarak 10 mm, titik B dengan jarak 25 mm, titik C dengan jarak 50 mm, titik D dengan jarak 100 mm dan titik E dengan jarak 150 mm. Gambar dari target posisi yang dikehendaki seperti pada gambar 32 berikut:
Titik AwalTitik A Titik B Titik C 320
Gambar 32 Pengaturan Posisi dengan methode absolute
Pengujian Kecepatan Motor
Kecepatan motor phasa tiga diatur dengan mengatur frekuensi yang masuk ke terminal motor. Pengaturan frekuensi diatur dari inverter, yang dikendalikan dari tegangan analog dari modul analog output PLC QX68-DAV. Pengujian dilakukan dengan mengatur nilai kecepatan pada touch panel dengan memasukan nilai kecepatan dari 0 – 1500 rpm. Nilai integer pada touch panel dibaca pada memori PLC. Pengolahan data dari PLC akan menghasilkan tegangan 0-5 V DC.
Power
Gambar 33 Rangkaian pengukuran kecepatan dan tegangan analog output
Pembahasan
JREC
Journal of Electrical and Electronics Vol. 3 No.2
pembahasan berupa grafik pengukuran kecepatan motor, tegangan keluaran analog output, frekuensi dan nilai jarak dari gerak meja yang dilengkapi dengan jarum penunjuk.
Metode yang digunakan untuk pengolahan data pengujian yaitu dengan metode Gauge Linerity and Bias Study dan gauge R and R study. Kedua metode ini digunakan untuk menganalisa apakah sistem yang dibuat memliki sifat linear dan memiliki nilai yang presisi. Dalam pemgolahan datanya dibantu menggunakan software Minitab 16 statistik software.
HASIL ANALISA DAN PEMBAHASAN
Secara umum pengujian system ini dilakukan untuk mengetahui apakah motor induksi AC phasa tiga dapat digunakan sebagai penggerak linier yang presisi seperti motor servo AC. Karena selama ini untuk penggunaan motor yang menghasilkan gerak linier yang presisi dilakukan oleh servo motor, mengingat harga servo motor yang relatif mahal maka apabila motor induksi dapat menghasilkan gerak yang linier dan presisi dapat menggantikan fungsi servo motor. Untuk menyatakan linearitas dan presisi dalam penelitian ini menggunakan metode gauge linearity and bias study dan gauge Repeteablity and Reproductivity study.
Pengujian Gerakan Linier
Pengujian gerak linier ini dilakukan dengan tujuan menguji apakah simulasi yang dibuat dapat menghasilkan gerak linier yang presisi. Pengujian dilakukan dengan membuat lima variasi target posisi yang dikendaki. Target posisi yang dikendaki adalah jarak posisi 10 mm, 25 mm, 50 mm, 100 mm dan 150 mm. Sedangkan variasi kecepatan motor AC phasa tiga dengan pengaturan pada kecepatan motor dengan frekuensi pada 20 Hz, 30 Hz dan 40 Hz. Masing-masing target posisi dilakukan pengujian sebanyak 10 kali pengujian. Pengujian dilakukan dengan membaca pengukuran pada jangka sorong digital, yang dilakukan oleh peneliti.
Analisa Data dan Hasil Pengujian Gerak Linier
Pengujian dilakukan dengan menggunakan metode linearity and bias study. Metode linearity dan bias study dalam penelitian ini digunakan untuk menguji apakah perancangan yang dibuat memliliki sifat linear atau tidak. Peralatan dikatakan memiliki sifat linier apabila selisih antara nilai bias dan nilai pengukuran yang diharapkan tidak melebihi dari batas yang telah ditentukan. Metode Repeatabilty and Reproductivity study digunakan untuk menguji apakah perancangan yang dibuat presisi. Peralatan dikatan presisi ditunjukan dengan seberapa dekat perbedaan nilai pada saaat dilakukan pengujian secara berulang-ulang.
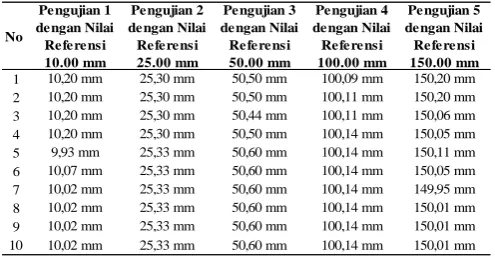
Pengujian yang dilakukan dalam penelitian ini adalah dengan 5 variasi dan 10 sampel pengukuran oleh satu operator. Hasil pengujian gerak linier dengan pengaturan frekuensi pada 30 Hz ditunjukan seperti pada tabel 1 Kecepatan motor pada frekuensi 30 Hz kecepatan motornya adalah 752 rpm.
Tabel 1 Data Pengukuran Gerak Linier Pada Frekuensi 30 Hz
Pada tabel 1 dapat dilhat bahwa ada selisih antara nilai referensi dan nilai hasil pengukuran. Dengan menggunakan software Minitab 16, mendapatkan nilai rata-rata bias adalah sebesar 0,230. Pada pengujian
JREC
Journal of Electrical and Electronics Vol. 3 No.2
ini studi variasi yang digunakan adalah 6 x dari nilai standard deviasi, sehingga total variasi dalam pengujian ini sebesar 345,247.
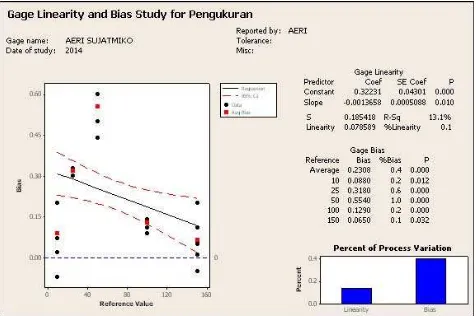
Pada perhitungan dengan software minitab standart deviasi adalah 0.0658 dan nilai repeatability sebesar 0.0658. Gambar 34 adalah grafik pengujian data pengukuran dengan metode gage linearity and bias study untuk pengukuran dengan nilai standar deviasi 0,0658.
Gambar 34 Grafik pengujian gage linearity dan bias study untuk pengukuran pada frekuensi 30 Hz
Hasil Pengujian gerak linier dengan pengaturan frekuensi pada 40 Hz ditunjukan seperti pada table 2 Kecepatan motor pada frekuensi 40 Hz kecepatan motornya adalah 730 rpm.
Tabel 2 Data Pengukuran Gerak Linier Pada Frekuensi 40 Hz
Pada tabel 2 dapat dilhat bahwa ada selisih antara nilai referensi dan nilai hasil pengukuran. Dengan menggunakan software Minitab 16, mendapatkan nilai rata-rata bias sebesar 1,1158. Pada pengujian ini studi variasi yang digunakan adalah 6 x dari nilai standard deviasi, sehingga total variasi dalam pengujian ini sebesar 341,675.
Dengan perhitungan dengan software minitab standart deviasi adalah 0.0592 dan nilai repeatability sebesar 0.0592. Untuk nilai Reproductivity tidak ditampilkan dalam perhitungan, karena pengukuran dilakukan oleh satu operator. Sehingga dalam pengujian ini nilai reproduktivity adalah 0. Gambar 35 adalah grafik pengujian data pengukuran dengan metode gage linearity and bias study untuk pengukuran dengan nilai standar deviasi 0,0592.
No
11,90 mm 26,36 mm 51,27 mm 100,90 mm 150,02 mm
Pengujian 5
11,95 mm 26,36 mm 51,30 mm 100,90 mm 150,05 mm
11,85 mm 26,40 mm 51,40 mm 100,80 mm 150,10 mm
11,86 mm 26,35 mm 51,35 mm 100,85 mm 150,08 mm
11,91 mm 26,70 mm 51,30 mm 100,92 mm 150,05 mm
11,94 mm 26,38 mm 51,40 mm 100,95 mm 150,10 mm
11,89 mm 26,36 mm 51,35 mm 100,86 mm 150,10 mm
11,90 mm 26,45 mm 51,33 mm 100,90 mm 150,08 mm
11,87 mm 26,37 mm 51,32 mm 100,90 mm 150,00 mm
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Gambar 35 Grafik pengujian gage linearity dan bias study untuk pengukuran pada frekuensi 40 Hz
Analisa Data dan Hasil Pengujian Putaran Motor
Tahap pertama dalam pengukuran putaran motor adalah dengan memilih kecepatan yang diinginkan pada interface touch panel. Pada interface touch panel ada tiga pilihan menu utama pemilihan kecepatan yaitu untuk frekuensi 20 Hz, 30 Hz dan 40 Hz. Selanjutnya data kecepatan aktual motor akan dibandingkan dengan nilai pada perancangan awal kecepatan motor. Pada perancangan kecepatan motor memiliki kecepatan 1480 rpm pada frekuensi 50 Hz, nilai ini diambil berdasarkan spesifikasi dari motor yang digunakan. Tegangan keluaran analog dari PLC diatur dari 0 sampai dengan 5 V DC. Hubungan antara tegangan keluaran analog PLC dan frekuensi ditunjukan seperti pada gambar 36.
5
Gambar 36 Grafik hubungan antara data integer, tegangan, frekuensi dan rpm.
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Tabel 3 Data pengukuran RPM pada kecepatan motor
Frekuensi
Pada table 3 dapat dilihat bahwa setiap perubahan frekuensi akan menyebabkan naiknya nilai RPM pada motor. Kenaikan nilai frekuensi sebanding dengan nilai kenaikan tegangan keluaran analog.
Pada table 3 dapat dilihat bahwa nilai rpm perancangan dengan nilai hasil pengukuran kecepatan motor ada selisih. Presentase kesalahan berkisar antara 0,2 % sampai dengan 3 %, ketika motor diberi frekuensi 30 Hz. Ketika motor diberi frekuensi kurang dari 30 Hz presentase kesalahan menjapai 29,4 %. Bahkan pada saat motor diberi frekuensi 10 Hz motor tidak berputar. Gambar 37 menunjukan perbandingan putaran motor antara perencanaan dengan hasil pengukuran.
Gambar 37 Grafik Perbandingan Pengukuran rpm
Pada grafik diatas terlihat bahwa ketika supply motor diberi frekuensi 5 Hz dan 10 Hz, motor tidak berputar. Pada kondisi ini dikarenakan torsi yang dihasilkan motor kecil. Berdasarkan grafik diatas motor yang digunakan pada penelitian ini akan memiliki torsi yang konstan ketika frekuensi supply antara 30 Hz sampai dengan 50 Hz.
Pembahasan Pengujian Gerak Linier
Dari data pengujian dan pengukuran sistem yang dibuat, diperolah data hubungan antara referensi posisi dan posisi aktual yang terukur dengan variasi frekuensi pengujian . Tabel 4 di bawah ini menunjukan hasil pengukuran antara jarak posisi dengan variasi frekuensi.
5 10 20 30 40 50 60
Rpm Refferensi 148 296 592 888 1184 1480 1775
Rpm Terukur 0 0 365 752 1010 1290 1530
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Table 4 Data pengukuran jarak posisi terhadap variasi frekuensi
Aktual Deviasi Aktual Deviasi Aktual Deviasi
1 10 mm 10 mm 0,10% 10 mm 0,80% 12 mm 18,00%
Dari data pada tabel 4 digambarkan dalam bentuk grafik seperti pada gambar 38 sebagai berikut:
Gambar 38 Grafik jarak posisi terhadap variasi frekuensi
Berdasarkan data pada tabel 4 bahwa nilai penyimpangan (deviasi) ketika supply motor diberi frekuensi 20 Hz sebesar 0,10 %, ketika frekuensi 30 Hz penyimpangannya sebesar 0,63 % dan ketika supply motor diberi frekuensi 40 Hz nilai penyimpangannya naik menjadi 5,41 %. Disini dapat dilihat bahwa semakin tinggi frekuensi nilai penyimpangan semakin besar. Berdasarkan nilai penyimpangan diatas sistem yang dibuat memiliki nilai penyimpangan maksimum 5.41 % pada saat frekuensi 40 Hz. Nilai penyimpangannya masih dibawah 10 %. Untuk akurasi jarak posisi pada penelitian ini sistem dikatakan akurat.
Pada gambar 34 dan gambar 35 menunjukkan hasil pengujian linearitas dari percobaan yang dibuat. Pada gambar 34 merupakan hasil pengukuran gerak posisi pada frekuensi 30 Hz. Pengujian linearitas dengan metode gauge linearity and bias study, dari data grafik tersebut terlihat persentasi linieritas sebesar 0,1 %. Untuk pengujian linearitas dengan frekuensi 40 Hz, pada gambar 35 menunjukan bahwa persentasi linearitas sebesar 1,2 %.
Untuk pengujian presisi dilakukan dengan metode gauge R dan R study, dari data pengujian untuk gerak posisi pada frekuensi 30 Hz didapatkan nilai persentasi proses dari total gauge Repeatability dan Reproduktivity sebesar 8,44 % dan pada saat pengujian pada frekuensi 40 Hz nilai prosentasi proses sebesar 8.34 %. Kedua presentasi proses tersebut masih di bawah 10 %, yang menyatakan bahwa pengujian dapat diterima.
10 25 50 100 150
Fr.20 Hz 10,01 25,05 50,06 100,05 150,01
Fr.30 Hz 10,08 25,3 50,5 100,12 150,06
Fr.40 Hz 11,8 26,4 51,3 100,8 150,06
0
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Pembahasan Interface Touch Panel
Interface yang direncanakan untuk mengendalikan motor AC gerak posisi yaitu dengan menggunakan touch panel merk proface GP 570. Software yang digunakan untuk membuat screen adalah dengan menggunakan Gpp Pro III. Dalam pembuatan interface ini ada dua screen utama yaitu screen untuk pengujian gerak posisi dan screen untuk pengaturan frekuensi. Adapun hasil rancangan dari interface touch panel sebagai berikut:
Hasil Rancangan Jendela Pengujian Gerak Posisi
Jendela pengujian gerak posisi ini merupakan layar utama untuk mengendalikan motor fungsi gerak linier posisi. Di dalamnya terdapat beberapa fitur untuk mengendalikan motor. Penjelasan darai beberapa fitur dapat dilihat sebagai berikut:
Gambar 39 Jendela interface pengujian gerak posisi
Tombol Man F dan Man R
Tombol ini merupakan tombol utama untuk menjalankan motor bergerak maju (Man F) atau mundur (Man R). Dibuat dari fungsi bit switch dan pengaturannya memontary.
Tombol Uji 1 sampai dengan Uji 5
Tombol ini merupakan pilihan pengaturan jarak posisi yang diinginkan. Tombol uji 1 untuk pilihan jarak 10 mm, uji 2 untuk jarak 25 mm, uji 3 untuk jarak 50 mm, uji 4 untuk jarak 100 mm dan uji 5 adalah tombol untuk pilihan jarak 150 mm.
Display Posisi
Pada tampilan atau display posisi ini akan ditampilkan jarak posisi dari gerakan motor. Display ini merupakan fungsi display numerik yang dibentuk dari N tag.
Tombol Reset
Tombol ini merupakan tombol untuk mereset pengaturan pilihan pengujian. Ketika akan mengganti pengujian tekan tombol reset.
Tombol Jog R dan Jog F
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Tabel 5 Tipe dan label pada jendela gerak posisi
No Nama Labe l Tipe Tag Alamat
1 Uji 1 bit switch M0096
2 Uji 2 bit switch M0097
3 Uji 3 bit switch M0098
4 Uji 4 bit switch M0099
5 Uji 5 bit switch M0100
6 Ind 10 mm lamp Y00096
7 Ind 25 mm lamp Y00097
8 Ind 50 mm lamp Y00098
9 Ind 100 mm lamp Y00099
10 Ind 150 mm lamp Y00100
11 Man R bit switch X00065
12 Man F bit switch X00066
13 RUN bit switch X00061
14 Jog R bit switch X00062
15 Jog F bit switch X00063
16 Reset bit switch X00064
17 Tampilan Data N tag D03020
Hasil Rancangan Jendela Pengaturan Kecepatan Motor
Jendela pengaturan kecepatan motor merupakan interface untuk mengatur kecepatan motor. Di dalamnya terdapat beberapa fitur untuk menentukan pilihan kecepatan motor yang diinginkan. Penjelasan dari beberapa fitur dapat dilihat sebagai berikut:
Gambar 40 Jendela pengaturan kecepatan motor
Tombol Utama
Tombol ini merupakan tombol utama untuk kembali ke layar pengaturan gerak posisi.
Tombol Pilihan 20 Hz, 30 Hz dan 40 Hz
Tombol ini merupakan pilihan kecepatan motor yang diinginkan. Tombol 20 Hz untuk pilihan frekuensi 20 Hz, 30 Hz untuk frekuensi 30 Hz, dan tombol 40 Hz adalah tombol pilihan pengaturan kecepatan motor dengan frekuensi 40 Hz.
Tombol Reset
Tombol ini merupakan tombol untuk mereset pilihan pengaturan frekuensi. Ketika akan mengganti pilihan frekuensi tekan tombol reset.
Tombol Error
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Pada jendela pengaturan frekuensi dalam pembuatan tag database mempunyai beberapa label yang dapat dilihat seperti pada tabel 6 berikut:
Tabel 6 Tipe dan label pada jendela pengaturan frekuensi
No Nama Labe l Tipe Tag Alamat
1 20 Hz bit switch M0092
2 30 Hz bit switch M0093
3 40 Hz bit switch M0093
4 Utama bit switch B1
5 Reset bit switch M0091
6 Error Bit Switch B3
Pembahasan Program PLC
Pada pemrograman PLC dalam peneilitain ini menggunakan bahasa pemrograman SFC. Dari standard pemrograman PLC sebenarnya pemrograman SFC terdiri dari blok fungsi dan garis transisi. Blok-blok fungsi dalam SFC berisi diagram ladder yang telah dibuat sebagai fungsi kontrol. Dalam pembuatan program untuk pengendali dalam penelitian ini terdiri dari dua pemrograman, yaitu pemrograman dengan ladder dan pemrograman dengan SFC.
Pemrograman PLC Dengan ladder Diagram.
Pemrograman PLC yang digunakan adalah dengan software GX Developer Ver.8. Untuk menjalankan modul VS-Q62 yang pertama dilakukan adalah mengatur parameter buffer memori pada PLC. Ladder untuk pengaturan parameter PLC sebagai berikut:
Ladder Pengaturan Parameter untuk Buffer Memori VS-Q62
Gambar 41 Ladder diagram untuk pengaturan parameter VS-Q62
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Ladder pilihan gerak posisi 150 mm
Gambar 42 Ladder diagram untuk pilihan gerak posisi 150 mm
Pada ladder diatas adalah ladder untuk pilihan penentuan gerak posisi linier dengan jarak 150 mm. Ketika M100 mendapat bit on dari bit switch pada touch panel, maka data 100 biner akan berpindah dari D105 ke D1. Bersamaan itu output relay Y100 akan on sehingga motor berputar. Ladder pengaturan jarak selengkapnya dapat dilihat di lampiran.
Ladder Pilihan Pengaturan Motor dengan Frekuensi 40 Hz
Gambar 43 Ladder diagram untuk pengaturan motor dengan frekuensi 40 Hz
Pada gambar ladder di atas pengaturan kecepatan motor untuk frekuensi 40 Hz dengan menekan bit switch pada touch panel. Memori bit M0094 adalah bit untuk tombol 40 Hz. Data yang dikirim bernilai 7700 akan dipindahkan ke alamat memori pada D222, dan selanjutnya data dari buffer memori D222 dipindahkan dengan perintah mov ke alamat memori D225. Alamat memori D225 ini adalah alamat untuk keluaran tegangan analog. Dengan nilai 7700 data word pada memori ini sesuai perancangan tegangan keluaran analog sebesar 3,3 V DC. Untuk pilihan frekuensi 20 Hz dan 30 Hz diagram ladder dapat dilihat pada lempiran.
Ladder Pembacaan posisi data actual
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Pada ladder diatas data perubahan posisi yang dibaca oleh encoder akan ditampilkan pada alamat memori D3019. Selanjutnya nilai pada data ini akan dipindahkan ke alamat memori 3020, dan selanjutnya data diolah pada alamat memori D3024.
Pemrograman PLC Dengan SFC
Untuk memudahkan pembacaan program, dalam pemrograman PLC ini dibagi menjadi tiga bagian utama, yaitu pemrograman untuk pengaturan parameter, pemrograman untuk pengaturan frekuensi motor dan pemrograman untuk pilihan jarak posisi yang diinginkan. Penjelasan dari masing – masing pemrograman sebagai berikut :
Pemrograman SFC untuk Pengaturan Parameter VS-Q62
Gambar 45 menunjukan pemrograman SFC untuk pengaturan Parameter VS-Q62.
Gambar 45 Pemrograman SFC untuk Pengaturan Parameter VS-Q62
Pada pemrograman diatas merupakan bentuk SFC dari pemrograman pengaturan parameter dengan ladder diagram seperti pada gambar 40. Dengan pemrograman SFC pemrograman PLC lebih tampak sederhana. Pada baris pertama merupakan step inisialisasi, beris kedua merupakan proses transisi. Untuk menjalankan ke langkah berikutnya transisi SM 1036 harus bekerja terlebih dahulu. Baris yang ke empat merupakan langkah proses pemindahan data. Pada baris ke tujuh merupakan penanda akhir dari satu proses.
Pemrograman SFC untuk Pemilihan gerak Posisi yang diinginkan.
Gambar 46 menunjukan pemrograman SFC untuk pemilihan gerak posisi yang diinginkan.
Gambar 46 Pemrograman SFC untuk pemilihan gerak posisi
JREC
Journal of Electrical and Electronics Vol. 3 No.2
Pemrograman SFC untuk Pengaturan frekuensi motor.
Gambar 47 menunjukan pemrograman SFC untuk pemilihan gerak posisi yang diinginkan.
Gambar 47 Pemrograman SFC untuk pengaturan frekuensi
Pada pemrograman diatas merupakan bentuk SFC dari pemrograman untuk pemilihan gerak posisi dengan ladder diagram seperti pada gambar 41. Dengan pemrograman SFC pemrograman PLC lebih tampak sederhana.
KESIMPULAN DAN SARAN Kesimpulan
Setelah dilakukan simulasi dan analisa hasil pengujian motor induksi AC phasa tiga digunakan sebagai servo posisi gerak linier dengan menggunakan kendalian PLC, dengan interval pengujian jarak posisi 0 mm sampai dengan 150 mm diperoleh hasil sebagai berikut:
1. Hasil pengujian linieritas untuk gerak posisi linier antara nilai referensi dan nilai aktual penyimpangannya tidak terlalu besar. Prosentase linearitas dari hasil pengujian berkisar antara 0,1 % sampai dengan 1,2 %.
2. Hasil pengujian presisi untuk gerak posisi linier antara nilai referensi dan nilai aktual penyimpangannya tidak terlalu besar. Prosentase proses pengujian sebesar 8,34 %.
3. Besarnya nilai penyimpangan atau nilai deviasi jarak posisi dengan kecepatan motor dengan frekuensi yang bervariasi dari 20 Hz sampai dengan 40 Hz berkisar antara 0,43% sampai dengan 5,41%.
4. Frekuensi supply untuk pengaturan kecepatan motor sebaiknya diatur diatas 20 Hz, karena ketika frekuensi kurang dari 20 Hz torsi yang dihasilkan motor sangat kecil.
5. Motor induksi AC 3 phasa dapat digunakan untuk pengaturan motor gerak posisi dengan menggunakan variable speed driver (VSD) yaitu inverter. Untuk variasi frekuensi yang disarankan adalah antara 20 Hz sampai dengan 50 Hz, karena ketika pengaturan kurang dari 20 Hz penyimpangan kecepatan motor cukup besar.
6. PLC tipe Q, dari Mitsubishi sudah dapat digunakan untuk aplikasi pemrograman dengan SFC sesuai standard IEC 61131-3.
Saran
1. Dalam penggunaan motor induksi phasa tiga sebagai penggerak servo posisi untuk mendapatkan nilai yang lebih presisi terutama pada kecepatan motor yang tinggi, disarankan tidak menggunakan metode on – off.
JREC
Journal of Electrical and Electronics Vol. 3 No.2
DAFTAR PUSTAKA
[1] Hugh Jack, Automating Manufacturing Systems with PLC, version 5.1, March 2008. [2] LA Bryan, Programmable Controller Theory and Implementation, 2nd ed
[3] User manual Varilimit VS-Q62PG, NSD Corporation, Nagoya Japan. 2006. [4] Proface, Gpp Pro / III Manual Programing For Windows. Ver 7.Tahun 2007
[5] Syarkawi Syamsudin, Refdinal Nazir, Surya Saputra, Jurnal, Pengontrolan (Posisi) motor servo AC dengan metode pengaturan Volt/Hertz, No. 27 Vol.2, ISSN: 0854-8471 Thn. XIV April 2007. [6] Andani, Chritoforus, Ikbal, Jurnal , Sistem Kendali Servo Posisi dan Kecepatan Motor dengan PLC,
Jurnal Ilmiah Foristek, September 2011.
[7] Thomas P Ryan, Modern Engineering Statistics, Published by John Wiley & Sons, Inc, Hoboken, New Jersey, 2007
[8] Melseq System Q Programable Logic Controller User Manual, Mitsubishi, Tahun 2004. [9] Riazollah Firoozian, Servo motor and Industrial Control Theory, Springer, 2009. [10] Mitsubishi Programable Controller, Position Control Training Manual, Tahun 2000. [11] Mitsubishi, GX Developer Ver 8, Operating Manual SFC, Melsoft, 2004.