PERANCANGAN SISTEM PENUNJUK
TEMPAT PARKIR (PGS) KENDARAAN
MENGGUNAKAN PROTOCOL CAN DAN
RTOS
Ryan Tantri Andi
[1], Wiedjaja Atmadja
[2] 1Fakultas Teknik, Universitas Bina Nusantara Email: [email protected]
2Fakultas Teknik, Universitas Bina Nusantara (selaku Pembimbing) Email: [email protected]
ABSTRACT
The purpose of this research is to design a parking guidance system for Anggrek campus parking building in Binus University with implementation of Real Time Operating System (RTOS), PIC32, CAN communication protocol, RS485communication protocol, and ultrasonic sensor. The system design method consist of several sections which are Master Controller (PC) as core system controller, Zone Controller which controls the Sensor Controller, Sensor Controller as the controller of each ultrasonic sensor, and also RS485-to-RS232 CAN converter which convert data communication from Zone Controller to Master Controller (PC). This research has these criteria to be analyzed beforehand which are researching Anggrek campus parking building in Bina Nusantara University, testing Ultrasonic Sensor, testing Sensor Controller module, testing Zone Controller module, and overall testing. Result showing that this system can be implemented properly in the Anggrek campus parking building in Binus University without to worry about any sensor interferention and these sensor able to measure 8 – 300 cm distance properly. Implementing RTOS and CAN to Zone Controller can update the data which received from each Sensor Controller within 898 ms Average of time. Number of parking slots can be increased up to 2028 parking slots. (R)
ABSTRAK
Penelitian ini bertujuan untuk menrancang sebuah sistem penunjuk tempat parkir untuk gedung parkir kampus Anggrek UBINUS dengan mengimplementasi Real Time Operating System (RTOS), PIC32, protokol komunikasi CAN, protokol komunikasi RS485, dan sensor ultrasonik. Metode perancangan sistem penunjuk tempat parkir ini meliputi beberapa bagian utama, yaitu Master Controller (PC) yang berperan sebagai pusat pengendali sistem, Zone Controller yang berperan sebagai pengendali Sensor Controller, Sensor Controller yang berperan sebagai pengendali tiga sensor ultrasonik, dan juga RS485-to-RS232 CAN converter yang berperan untuk mengkonversi komunikasi data dari Zone Controller ke Master Controller (PC). Analisa yang dilakukan meliputi beberapa hal seperti meneliti gedung parkir Kampus Anggrek UBINUS, pengujian sensor ultrasonik, pengujian modul Sensor Controller, pengujian modul Zone Controller dan pengujian keseluruhan sistem. Hasil yang didapatkan menunjukkan bahwa sistem ini dapat diimplementasikan dengan baik pada gedung parkir UBINUS tanpa perlu mengkhawatirkan terjadinya interferensi antara satu sensor dengan sensor lainnya dan sensor mampu untuk mengukur dengan baik pada jarak 8 – 300 cm. Mengimplementasikan RTOS dan CAN pada Zone Controller dapat memperbarui data yang diterima dari setiap Sensor Controller dengan waktu rata-rata 898 ms. Selain itu jumlah tempat parkir yang bisa ditambahkan yaitu 2028 slot parkir. (R)
Kata kunci:
Parking Guidance System, Master Controller, Zone Controller, Sensor Controller, PIC32, Controller Area Network, RS485, Free RTOS
PENDAHULUAN
Pertumbuhan migrasi penduduk ke ibukota indonesia yaitu DKI Jakarta terus meningkat setiap tahun. Berdasarkan data pada Badan Pusat Statistik (BPS), Jakarta merupakan kota dengan tingkat migrasi yang paling tinggi.(Badan Pusat Statistik, 2013) Hal ini disebabkan karena pertumbuhan ekonomi dan sosial di Jakarta yang terus meningkat, sehingga banyak orang yang ingin bermigrasi ke jakarta demi mendapatkan pekerjaan dan kehidupan sosial yang lebih baik. kepadatan penduduk jakarta menyebabkan masalah yang hingga saat ini masih dalam tahap penanggulangan oleh pemerintah yaitu kemacetan.
Salah satu solusi yang diterapkan yaitu Parking Guidance System yang merupakan sistem yang dikontrol oleh beberapa controller yang berkomunikasi menggunakan protokol komunikasi tertentu dan menggunakan sensor atau visual sebagai pendeteksi kendaraan. Pengembangan sistem ini merupakan lanjutan dari penelitian sebelumnya yang hanya memiliki
Sensor Controller, Master Controller dan hanya memiliki protokol komunikasi RS-485. Pada
penelitian yang sekarang ditambahkan Zone Controller dan protokol komunikasi Controller
Area Network (CAN) yang dapat meningkatkan kuantitas atau jumlah tempat parkir yang dapat
dikontrol serta mempercepat proses penerimaan data.
Perbandingan lain terhadap sistem ini yaitu penelitian yang publikasikan oleh Guozhong Yao pada jurnal yang berjudul The Design of Parking Guidance and Information System based
on CAN yang menjelaskan tentang sistem parkir yang menggunakan fitur kamera sebagai
pendeteksi mobil masuk dan keluar serta sensor ultrasonik sebagai pendeteksi slot parkir dan kemudian menggunakan protokol CAN (Controlled Area Network) sebagai pengatur komunikasi antar keseluruhan sistem. Setiap kendaraan yang masuk akan di potret oleh kamera yang sudah diatur pada mode trigger dan disimpan kedalam database yang ada pada sistem kontrol utama. (Guozhong Yao, 2010)
Sistem yang dibuat terdiri dari mikrokontroler PIC32 yang digunakan pada modul Zone
Controller dan Sensor Controller dimana tugas Zone Controler mengendalikan sensor controller yang dapat mengendalikan 2-3 sensor ultrasonik secara bersamaan dengan
menggunakan Real Time Operating System (RTOS) FreeRTOS. Mengimplementasikan FreeRTOS ke dalam PIC32 dapat membantu PIC32 agar mampu membagi tugas yang dikerjakan secara bersamaan dalam waktu yang ditentukan.
Tujuan dari penelitian ini yaitu merancang sebuah prototype perancangan sistem penunjuk tempat parkir kendaraan menggunakan protokol komunikasi Controller Area Network (CAN) berbasis RTOS.
Manfaat yang didapat dalam mengembangkan Parking Guide System adalah memberikan kemudahan kepada para pengguna dan pengelola tempat parkir terutama gedung parkir yang belum memiliki sistem ini, menambah jumlah tempat parkir yang bisa ditangani oleh sistem, mempercepat proses penerimaan data dan proses mengupdate aplikasi oleh sistem.
METODE PENELITIAN
Parking guidance system biasanya menggunakan teknologi berbasis sensor dan visual
dimana masing-masing memiliki kelebihan dan kekurangan. Teknologi berbasis sensor memiliki kekurangan yaitu mudah terpengaruh terhadap lingkungan ekstrim dan faktor dari dalam sistem. Sedangkan kelebihannya yaitu mudah diimplementasikan, memiliki biaya murah dalam hal perawatan. Sensor yang banyak digunakan pada parking guide system yaitu sensor ultrasonik yang merupakan sensor yang memiliki gelombang suara lebih dari 20 KHz yang
memiliki directivity yang tinggi dan dapat berjalan diudara. (Dita Ditafrihil Fuadah, 2013) sedangkan teknologi berbasis visual biasanya menggunakan kamera namun memiliki kekurangan yaitu membutuhkan biaya yang mahal dalam hal pemasangannya. (Amin Kianpisheh, 2012)
Parking guidance system juga memiliki jenis-jenis mekanisme tertentu antara lain blind search yang merupakan jenis mekanisme yang paling sering digunakan oleh pengendara karena
kurangnya informasi dari tempat parkir pada gedung-gedung parkir kemudian Parking
Information Sharing (PIS) yang merupakan jenis mekanisme yang digunakan pada gedung
parkir yang hanya memberitahukan ketersediaan tempat parkir kemudian Buffered PIS (BPIS) yang merupakan jenis mekanisme yang memberitahukan informasi ketersediaan tempat parkir secara spesifik. (Wang & He, 2011)
Sistem yang akan dibuat menggunakan dua operating system yang pertama yaitu RTOS (Real Time Operating System) yang diimplementasikan kedalam modul-modul controller dan GPOS (General Purpose Operating System) yang digunakan untuk aplikasi GUI (Graphic User
Interface). RTOS yaitu sebuah sistem operasi yang mendukung aplikasi real-time dengan
memberikan hasil secara logis didalam batas waktu yang diperlukan. GPOS yaitu sistem operasi yang mendukung fungsi dasar dari komputer dan menyediakan pelayanan ke program atau aplikasi yang dijalankan oleh komputer. (Jain, 2011) RTOS yang digunakan yaitu FreeRTOS dan GPOS yang digunakan yaitu Linux. FreeRTOS adalah sebuah kernel open source, portable dan
real time operating system berukuran kecil yang dikembangkan oleh para Real Time Engineers Ltd yang dalamnya terdapat 3-4 files dalam bahasa C dengan beberapa fungsi asembli
(tergantung dari coroutines yang digunakan) yang ukurannya 4-9 kb saja. (Rafia Inam J. M.-T., 2010)
Protokol komunikasi yang digunakan pada sistem ini yaitu protokol komunikasi CAN (Controller Area Network) , protokol komunikasi RS-485 dan RS-232. Protokol komunikasi CAN secara singkat yaitu protokol komunikasi serial asinkron yang memiliki kemampuan multimaster yang artinya setiap pesan akan dikirim secara broadcast ke semua nodes dalam jaringan komunikasi dengan kecepetan transmisi data hingga 1 Mbit/s. (Wei Lun Ng, 2010)
CAN menyediakan 2 layer sesuai standar model dari ISO yaitu Physical Layer dan Data
Link Layer. Physical Layer dari CAN secara singkat dapat dijelaskan sebagai berikut yaitu ISO
11898-2 High Speed CAN yang memiliki kecepatan transmisi daa mencapai 1Mbps dan jarak komunikasi hingga 40 m, ISO 11898-3 Fault Tolerant CAN yang memiliki kecepatan transmisi data 125 kpbs dan jarak komunikasi tergantung dari beban bus, SAEJ2411 Single Wire yang memiliki kecepatan transmisi data hingga 33,3 kbps dan dapat menanggung beban hingga 32
nodes dalam 1 jaringan komunikasi, ISO 11992 Point to Point memiliki kecepatan transmisi data
hingga 125 kbps dan jarak komunikasi hingga 40m. untuk menambah jalur komunikasi dapat digunakan repeaters. (Joaquim Ferreira, 2011)
CAN juga memiliki data link layer yang secara singkat yaitu terdiri dari servis dan protokol yang digunakan untuk memastikan pengiriman informasi antar node satu dengan node lainnya . Pesan atau informasi yang dikirim oleh CAN disebut frame, pada CAN terdapat 4 tipe
frame : data frames, error frames, remote transmission request frames, dan overload frames.
Sesuai dengan ISO standard 11898 Controller Area Network menyediakan 11 bit identifier untuk melakukan transmisi data dengan kecepatan 125 kbps hingga 1Mps. Kemudian standar ini dikembangkan lagi agar dapat memberikan bit identifier untuk setiap informasi yang lebih banyak dengan nama versi “Extended” dengan besar 29 bit identifier. Versi standar 11 bit
identidier menyediakan 211 atau 2048 identifier pesan berbeda untuk setiap node sedangkan versi extended memberikan 229 atau 537 juta identifier pesan untuk setiap node. (Wei Lun Ng, 2010)
CAN memiliki dua managemen pendeteksi error yang terdiri dari 2 level yaitu message
level dan bit level. Pendeteksi error untuk message level terdiri dari Cyclic Redudancy Check
yang merupakan mekanisme yang digunakan untuk mengecek pesan atau informasi yang rusak dengan cara membandingkan bit polynomial yang terdapat pada pengirim dan penerima ketika pengiriman pesan informasi terjadi, Acknowledge Errors yang merupakan mekanisme dengan cara mengecek ACK bit yang terdapat pada pesan pada pihak penerima, Frame Check yang merupakan mekanisme yang digunakan untuk mendeteksi adanya pergantian format pesan dan perubahan ukuran pesan. Pendeteksi error untuk bit level terdiri dari Transmission Monitoring yang merupakan mekanisme yang digunakan oleh nodes pengirim untuk mengawasi aktifitas dari bus. Bit Stuffing yang merupakan mekanisme yang digunakan untuk menghindari node kehilangan sinkronisasinya dengan menerima dominant bit atau recessive bit. (Joaquim Ferreira, 2011)
Protokol komunikasi RS-485 secara singkat dapat dijelaskan merupakan protokol komukasi serial asinkron dengan kemampuan multidrop/ multipoint yang artinya transfer data dapat dilakukan dari satu transmitter ke beberapa receiver sekaligus. Selain itu komunikasi data dapat dilakukan pada jarak yang cukup jauh yaitu 1,2 Km. (Tanghe, 2011) Selain dapat digunakan untuk jarak yang jauh teknik ini juga dapat digunakan untuk menghubungkan 32 unit beban sekaligus hanya dengan menggunakan dua buah kabel saja tanpa memerlukan referensi
ground yang sama antara unit yang satu dengan unit lainnya. Selain itu RS-485 memiliki
kecepatan transmisi data hingga 10 Mbps. (Abdus Salam, 2012)
Keistimewaan dari RS-485 antara lain terletak pada transmisi differensialnya (sering disebut juga sebagai balanced transmission). Dalam transmisi diferensial ini level tegangan TTL diterjemahkan menjadi selisih tegangan antara output A dan B. Dengan demikian efek dari noise dapat diminimalkan, karena interferensi noise akan terjadi sekaligus pada jalur output (A) dan jalur complementary output (B) sehingga selisih tegangan antara output A dan B tetap. (Abdus Salam, 2012)
Protokol komunikasi RS-232 juga merupakan protokol komunikasi serial asinkron yang bekerja secara one to one artinya komunikasi satu arah yang memiliki kecepatan transmisi data yaitu 500 kbps yang akan berkurang sesuai jarak komunikasi yang digunakan. (Tanghe, 2011)
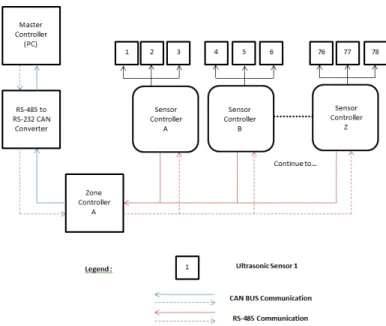
Secara garis besar, keseluruhan sistem terdiri dari 26 sensor controller yang diberi alamat A sampai Z dan mengontrol 2-3 sensor ultrasonik yang berfungsi untuk menerima data dari sensor ultrasonik dan memproses data tersebut, kemudian Zone controller yang berfungsi untuk mengecek keutuhan data dan memastikan data yang diterima valid atau tidak valid serta
RS485 to RS232 CAN Converter yang digunakan untuk berinteraksi dengan Master Controller
(PC).
Gambar 1 Blok diagram keseluruhan sistem
Master controller menggunakan PC yang di dalamnya diimplementasikan Real Time Operating System (RTOS) yaitu FreeRTOS. Data yang disimpan pada master controller akan
ditampilkan pada layar PC melalui GUI yang sudah dibuat menggunakan aplikasi Qt.
Zone Controller terdiri dari PIC32 yang menggunakan tipe mikrokontroller
PIC32MX250F128B, protokol komunikasi RS-485 menggunakan tipe mikrokontroller MAX487 untuk berkomunikasi dengan Sensor Controller, kemudian protokol komunikasi Controller Area
Network (CAN) untuk berkomunikasi dengan Master Controller menggunakan tipe
mikrokontroller CAN Tranceiver MCP2551 untuk melakukan pengiriman dan penerimaan melalui jalur komunikasi CANH (CAN High) dan CANL (CAN Low) dan tipe mikrokontroller CAN Controller MCP2515 untuk berinteraksi dengan PIC32 melalui CAN SPI yang terdiri dari 4 konfigurasi pin Serial-Data-Input, Serial-Data-Output, SCK dan Chip Select. setiap pin tersebut dihubungkan ke pin input/output pada PIC32 sesuai dengan fungsinya yang ada pada
Sensor Controller terdiri dari PIC32 lalu protokol komunikasi RS485 menggunakan tipe
mikrokontroller MAX487 lalu menyediakan input untuk pin Trigger dan pin Echo untuk sensor ultrasonik selain itu sirkuit untuk sumber tegangan 5 Volt dan 3.3 Volt serta menggunakan
addressing 8 bit sirkuit eksternal untuk pengalamatan dari sensor controller
CAN Converter memiliki design yang sama dengan design zone controller namun
ditambahkan komunikasi UART menggunakan tipe mikrokontroller MAX232CPE agar dapat berinteraksi dengan Master Controller atau PC, CAN converter bertugas untuk mengkonversi CAN sehingga dapat berkomunikasi dengan PC.
HASIL DAN BAHASAN
Alat-alat pendukung yang digunakan dalam pengujian sistem antara lain yaitu kabel 300 m yang dikostumisasi menjadi twisted pair dan menggunakan DB9 untuk menghubungkan modul-modul controller, menggunakan measuring tape untuk mengukur jarak dan peletakan sensor ultrasonik, kamera DSLR (Digital Single-Lens Reflex) yang digunakan merekam kondisi pada tempat parkir, dan menggunakan software-software tertentu untuk mengedit video yang digunakan untuk mendapatkan data waktu yang dibutuhkan master controller dalam menerima data.
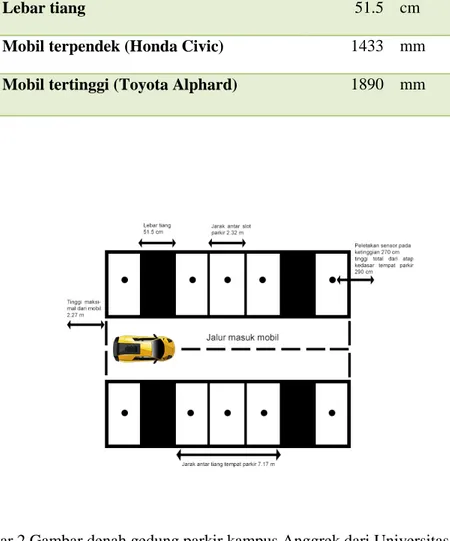
Hasil dari pengujian pertama dari sistem adalah meneliti dan mengukur gedung parkir kampus Anggrek di Universitas Bina Nusantara yang dilakukan dengan cara mengambil 2 jenis mobil yang masing-masing memiliki ketinggian mobil yang berbeda dimana akan diambil perkiraan mobil tertinggi dan mobil terpendek tujuannya agar dapat menentukan berapa jarak referensi yang harus diukur oleh sensor ultrasonik untuk mendeteksi adanya mobil atau tidak. Dan menentukan gambaran denah parkir supaya dapat diketahui tempat peletakan sensor yang baik.
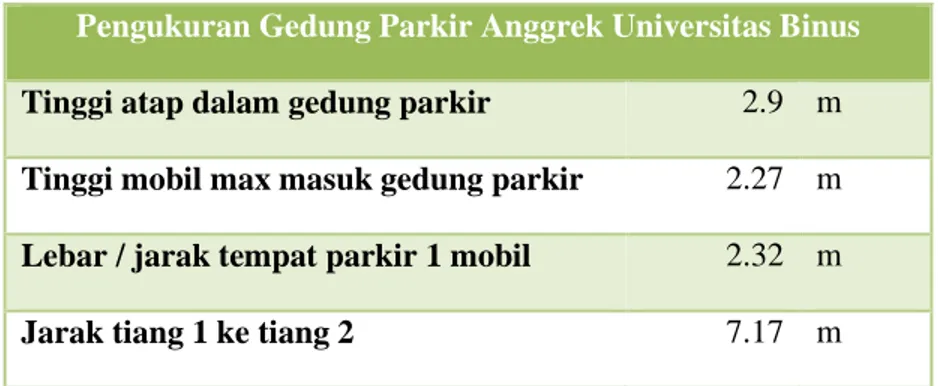
Tabel 1 Hasil pengukuran denah gedung parkir Universitas Binus
Pengukuran Gedung Parkir Anggrek Universitas Binus Tinggi atap dalam gedung parkir 2.9 m
Tinggi mobil max masuk gedung parkir 2.27 m
Lebar / jarak tempat parkir 1 mobil 2.32 m
Lebar tiang 51.5 cm
Mobil terpendek (Honda Civic) 1433 mm
Mobil tertinggi (Toyota Alphard) 1890 mm
Gambar 2 Gambar denah gedung parkir kampus Anggrek dari Universitas Binus
Hasil dari pengujian kedua yaitu pengujian sensor ultrasonik yang bertujuan untuk membuktikan berapa jarak maksimal dan minimal yang bisa diukur oleh sensor ultrasonik tipe HC SR-04 yang secara singkat dapat dijelaskan bahwa sensor mengalami error pada awal pengukuran pada jarak 2 – 6 cm dikarenakan konfigurasi FreeRTOS kedalam PIC32 yang membutuhkan waktu 20 us berbeda dengan waktu pada umumnya yaitu 10 us untuk mengaktifkan trigger pada sensor ultrasonic. Pengambilan data yang dilakukan yaitu sebanyak 10 sampel untuk setiap jarak pengukuran. Hasil menunjukkan sensor dapat mengukur pada jarak minimal 8 cm dengan error (0.73 cm dari jarak ukur) dan jarak maksimal 300 cm dengan error (11.22 cm dari jarak ukur). kendala dalam pengujian ini yaitu sensor ultrasonik menghasilkan pengukuran yang tidak konsisten dimana sering terjadi interferensi disebabkan karena faktor dari lingkungan dan konfigurasi dari sistem yang merupakan limitasi dari sistem ini.
Hasil dari pengujian ketiga yaitu pengujian modul sensor controller yang dibagi menjadi 2 bagian pertama Uji respon RTOS & protokol komunikasi RS-485 dan yang terakhir Uji Interferensi (Jarak Aman Antar Sensor) untuk menunjukkan seberapa cepat master controller menerima informasi ketersediaan tempat parkir dan menentukan jarak antar sensor.
Diasumsikan waktu rata-rata ideal yang diinginkan yaitu mendekati 520 ms dihitung berdasarkan jumlah sensor controller yang dikontrol oleh zone controller yaitu 26 modul dan 20 ms (waktu yang ditetapkan diprogram) waktu yang diperlukan master controller mengirim alamat ke sensor controller namun setelah dilakukan pengujian ternyata hasil rata-rata yang dihasilkan yaitu 1001 ms atau 1 detik.
Hasil dari pengujian keempat yaitu pengujian modul Zone Controller yang dibagi menjadi 2 bagian yaitu Uji protokol komunikasi CAN dan Uji ke Sensor Controller. Pada bagian pertama yaitu uji protokol komunikasi CAN dapat dijelaskan waktu yang dibutuhkan Master
Controller untuk mengirim alamat ke Zone Controller yaitu dirata-ratakan 266 ms tanpa
menggunakan modul Sensor Controller kemudian pada bagian kedua akan digunakan modul
Sensor Controller.
Hasil yang didapatkan menunjukkan bahwa master controller membutuhkan waktu kurang lebih 898 ms untuk mengupdate aplikasinya dalam menerima data dari keseluruhan sistem. Hasil dari pengujian ini lebih cepat dibandingkan pengujian sebelumnya yang hanya menggunakan sensor controller dikarenakan implementasi protokol komunikasi CAN dan FreeRTOS pada zone controller yang mampu mempercepat proses penerimaan data oleh master
controller.
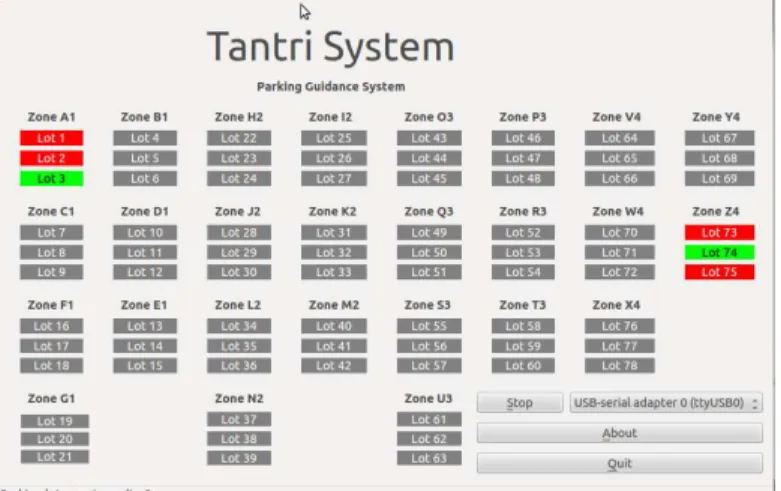
Hasil yang kelima yaitu pengujian keseluruhan sistem oleh master controller, zone
controller dan sensor controller yang ditujukan untuk menampilkan hasil dari pembuatan
keseluruhan modul-modul serta ditampilkan melalui Graphic User Interface (GUI) menggunakan aplikasi Qt yang juga dibuat untuk menampilkan status dari tempat parkir bagi pengguna tempat parkir. Ditandai dengan warna hijau untuk kondisi tidak ada mobil dan dengan warna merah untuk kondisi ada mobil.
Terdiri dari 26 zona parkir dimana satu zona parkir dapat mengontrol 3 slot parkir serta keterangan slot parkir yang tersedia, penamaan zona parkir yang terlihat pada Graphic User
Interface (GUI) disesuaikan dengan pengalamatan yang digunakan untuk modul-modul. Zona
A1 artinya untuk sensor controller A atau 1 pada lantai 1 kemudian K2 artinya untuk sensor
controller K atau sensor controller 11 pada lantai 2, R3 untuk sensor controller R pada lantai 3
yang terakhir Z4 untuk sensor controller Z atau 26 pada lantai 4. Dan jumlah tempat parkir yang bisa ditambahkan yaitu 2028 sesuai dengan kemampuan modul zone controller dan protocol komunikasi CAN yang mampu mengatur lebih dari 2000 nodes sesuai dengan jenis perangkat keras yang digunakan.
SIMPULAN DAN SARAN
Berdasarkan pengujian yang telah dilakukan dapat disimpulkan bahwa sensor ultrasonik mampu mengukur dengan baik pada jarak 8 – 300 cm dalam sistem ini, jarak aman peletakan sensor ultrasonic yaitu 2 meter, jumlah tempat parkir yang bisa ditambahkan 2028 slot parkir, waktu yang dibutuhkan master controller untuk menerima data menggunakan sensor controller yaitu kurang lebih 1001 ms sedangkan menggunakan keseluruhan modul waktu yang didapat yaitu kurang lebih 898 ms dimana waktu yang dihasilkan lebih cepat karena implementasi protokol komunikasi Controller Area Network (CAN) dan FreeRTOS yang mampu mempercepat proses pembaruan data, limitasi dari sistem yaitu sering terjadi interferensi pada lingkungan yang ekstrim serta konfigurasi dari sistem dan kesimpulan terakhir yaitu sistem berjalan dengan baik jika diimplementasikan ke gedung parkir kampus anggrek di Universitas Bina Nusantara.
Saran untuk penelitian selanjutnya yaitu dapat menggunakan sensor ultrasonik yang memiliki echo dan trigger satu pemancar untuk mendapatkan hasil yang presisi dan mengurangi interferensi. Selain itu mengimplementasikan protokol komunikasi Controller Area Network (CAN) ke semua modul agar proses pembaruan data ketika menerima data lebih cepat. Menambah jumlah modul zone controller dapat meningkatkan kuantitas dari tempat parkir sesuai kebutuhan sistem
REFERENSI
Deshmukh, Sanjay. (2013). Comparison of Open Source RTOSs Using Various Performance
Parameters. ISSN 2249-071X
Ferreira, Joaquim., Fonseca, Jose. (2013). Controller Area Network.pdf
Gang, Y., & Cassandras, C. G. (2012). A New "Smart Parking" System Infrastructure and
Herlambang. (2012). RS-485 Communication Network - Pengenalan, diakses pada 12 September 2014 dari http://www.nubielab.com/elektronika/rs485-communication-network-pengenalan
Hikita, Munenori (2010). An introduction to ultrasonic sensors for vehicle parking, diakses pada 12 September 2014 dari
http://www.newelectronics.co.uk/electronics-technology/an-introduction-to-ultrasonic-sensors-for-vehicle-parking/24966/
Idris, M.Y.I., Leng, Y.Y., Tamil, E.M., Noor, N.M., Razak, Z., Fong, K.W. (2009). Parking
Guide System Utilizing Wireless Sensor Network & Ultrasonic Sensor
Idris, M.Y.I., Leng, Y.Y., Tamil, E.M., Noor, N.M., Razak, Z. (2009). Car Park System: A
Review of Smart Parking System and It’s Technology , ISSN 1812-5638
Inam, Rafia., Maki-Turja,Jukka., Sjodin, Mikael., Behnam, Boris., (2012). Hard Real-time
Support for Hierarchical Scheduling in FreeRTOS.
Jain, Preeti (2011). RTOS - Real Time Operating System, diakses pada 12 September 2014 dari
http://www.engineersgarage.com/articles/rtos-real-time-operating-system
Kianpisheh, A., Mustaffa, N., Limtrairut, P., & Keikhosrokiani, P. (2012). Smart Parking System
(SPS) Architecture Using Ultrasonic Detector. International Journal of Software Engineering and Its Applications , 51-58
Maggo, Surbhi., Aswani, Reema. (2013). Car Park System: A Review of Smart Parking System
and It’s Technology , ISSN: 2278-0661, ISBN: 2278-8727Volume 8, Issue 3 (Jan. - Feb. 2013), PP 47-56
Mistry, J. (2011). FreeRTOS and Multicore. 1-113.
Moksha, Poorna (2011). What is Operating System, Kernel and Types of kernels, diakses pada 12 September 2014 dari http://www.go4expert.com/articles/operating-kernel-types-kernels-t24793/
Ng, Wei Lun., Ng, Chee Kyun., Mohd. Ali, Borhanuddin., Kamariah Noordin, Nor., Zaman Rokhani, Fakhrul. (2010). Review of Researches in Controller Area Networks Evolution and
Applications , Proceeddings of the Asia-Pacific Advanced Network 2010 v. 30, p. 14-21.
Rashid, M.M., Musa, A., Ataur Rahman, M., Farahana, N., Farhana, A. (2012). Automatic
Parking Management System and Parking Fee Collection Based on Number Plate Recognition , International Journal of Machine Learning and Computing, Vol. 2, No. 2, April 2012
Rouse, Margaret (2010). cyclic redundancy checking, diakses pada 12 September 2014 dari
http://searchnetworking.techtarget.com/definition/cyclic-redundancy-checking
Rouse, Margaret (2010). firmware, diakses pada 12 September 2014 dari
Salam, Abdus.,Mukhidin, & Tasma Sucita. (2012). Rancang Bangun Sistem Jaringan Multidrop
Menggunakan RS-485 Pada Aplikasi Pengontrolan Alat Penerangan Kamar hotel , 1-11
Tanghe, S. (2011). Multiprotocol Transceivers Combine RS485 and RS232 in a Single Device to
Simplify and Shrink Application that Use Both Standards. Journal of Analog Innovation , 12 -
19.
Thakare, Vivekanand P., Chaven, N.A. (2012). Performance Evaluation of Parking Guidance
and Management System using Wireless Sensor Network , ISSN: 2277-2878
Wang, H., & He, W. (2011). A Reservation-based Smart Parking System. The First International
Workshop on Cyber Physical Network Systems , 701-706.
Waqas, Ali (2010). What Is Bootloader And How To Unlock Bootloader On Android Phones
[Complete Guide], diakses pada 12 September 2014 dari
http://www.addictivetips.com/mobile/what-is-bootloader-and-how-to-unlock-bootloader-on-android-phones-complete-guide/
Yao, Gouzhong., Wang, Jianqun., Li, Zhenshan., Ran, Xuejun. (2010). The Design of Parking
Guidance and Information System based on CAN , International Conference on Intelligent Control and Information Processing August 13-15, 2010 - Dalian, China
Yao, Gouzhong., Wang, Jianqun., Li, Zhenshan., Ran, Xuejun. (2010). Topology Study on
Parking Guidance and Information System based on CAN2010 International Conference on Computer, Mechatronics, Control and Electronic Engineering (CMCE)
RIWAYAT PENULIS
Ryan Tantri Andi lahir di kota Pekanbaru pada tanggal 15 April 1992. Penulis
menamatkan pendidikan S1 di Universitas Bina Nusantara dalam bidang Ilmu Komputer pada tahun 2014.