8.3 KURVA
Sebagai salah satu terapan pentinng kalkulus vector , marilah kita pelajari fakta dasar tentang kurva di dalam ruang . Pembaca akan mengetahui bahwa kurva dijumpai di dalam berbagai masalah , baik di dalam kalkulus maupun fisika , misalnya , sebagai lintasan partikel yang bergrerak . perlu dikemukakan bahwa studi tentang kurva dan permukaan di dalam ruang dengan menggunakan kalkulus merupakan suatu cabang matematika yang penting dinamakan geometri diferensial .
Jika kita menggunakan suatu sistem koordinat Kartesius , kita dapat mempresentasikan sebuah kurva C dengan suatu fungsi vektor ( gambar 182) (1) r(t) = [x(t) , y(t) , z(t)] = x(t)I + y(i)t + z(t)k ;
Untuk setiap nilai t0 dari peubah nyata t kita menghubungkannya dengan sebuah titik pada C yang mempunyai vektor posisi r(t0) , yang berarti berkoordinat x(t0), y(t0) , z(t0) .
Representasi yang berbentuk (1) dinamakan representasi parametric kurva C , dan t dinamakan parameter representasi ini . Representasi semacam ini bermanfaat dalam banyak penerapan , misalnya di dalam mekanika, dengan t menyatakan waktu .
Representasi lain bagi kurva di dalam ruang adalah (2) y = f(x) , z = g(x)
Dan
(3) F(x,y,z) = 0 , G(x,y,z ) = 0
Di dalam (2), fungsi y =f(x) merupakan proyeksi kurva tersebut ke bidang – xy , sedangkan z = g(x) dalah proyeksi kurva itu ke bidang –xz . di dalam (3) , setiap persamaan merepresentasikan suatu permukaan , dan kurva itu adalah perpotongan kedua permukaan tersebut .
Teladan 1. Garis Lurus
Sembarang garis lurus L dapat direpresentasikan dalam bentuk
(4) r(t)= a + tb = (a1 + tb1) I + (a2 + tb2 ) j + ( a3 + tb3 ) k
Atau , dalam notasi yang lain ,
r(t) = [ a1 + tb! , a2 + tb2 , a3 + tb3 ] ,
dengan a dan b adalah vektor konstanta . L melalui titik A dengan posisi r = a dan mempunyai arah (gambar 183 ) . jika b suatu vektor satuan , komponen-komponennya merupakan kosinus arah garis L , dan dalam hal ini , │t │mengukur jarak titik – titik pada L ke A . misalnya , garis lurus pada bidang-xy yang melalui A: (3,2 ) dan berkemiringan 1 adalah
r(t) = [ 3 , 2 , 0 ] + t ( 1 , 1 , 0 ] = [ 3 + t , 2 + t , o ] Teladan 2 . Elips , lingkaran
Fungsi vektor
( 5 ) r(t) = a cos t i = b sin t j
Merepresentasikan suatu elips pada bidang – xy dengan pusat di titik asal dan sumbu – sumbu utama dalam arah sumbu - x dan sumbu – y . Dan memang , karena cos2 t + sin2 t = 1 , maka kita memperoleh dari (5)
x
2
a
2
+y
2
b
2
= 1 , z = 0 .1
16
x
2 +1
4
y
2
= 1 . dengan setengah sumbu – sumbunya 4 dan 2 .
Teladan 3 . Heliks melingkar
Kurva terpuntir C yang dipresentasikan oleh fungsi vektor (6) r(t) = a cos t i + a sin t j + ct k
Dinamakan heliks melingkar . Kurva ini terletak pada silinder
x
2 +y
2 =a
2 . Jika c > 0 , heliks itu membentuk sekrup atau uliran tangan-kanan ( gambar 184 ) . Jika c < 0 , heliks itu membentuk uliran tangan kiri ( Gambar 185 ) misalnya , heliksr(t) = cos t i + sin t j + tk
membentuk uliran tangan – kanan , terletak pada silinder x2 + y2 = 1 dan mempunyai pitch 2π , artinya koordinat –z titik titik pada heliks yang terletak vertical di atas satu sama lain berselisih kelipatan bulat 2π .
Bagian kurva diantara dua titik pada kurva sering dinamakan busur suatu kurva . untuk kemudian kita akan menggunakan istilah yang sama “kurva” untuk menyatakan seluruh kurva maupun suatu busur kurva .
Teladan 4 . Kurva sederhana dan kurva bukan sederhana
Elips dan heliks merupakan kurva sederhana . kurva yang direpresentasikan oleh
r(t) =
r
2¿
– 1 ) i + r 3−1 ) j
bukanlah kurva sederhana , sebab kurva ini memiliki titik ganda dua titik asal ; titik ini padanan dua nilai t = - 1 . dapatkah anda membuat sketsanya ?
Terakhir perlu dikemukakan bahwa suatu kurva C yang sama dapat direpresentasikan oleh berbagai fungsi vektor . misalnya , jika C dinyatakan oleh (1) dan kemudian kita ambil t = h (t*) , maka kita memperoleh sebuah fungsi vektor baru ř(t*) yang juga
Merepresentasikan C , asalkan h(t*) mecakup semua nilai t yang muncul di dalam (1) . misalnya , jikaC adalah lintasan sebuah benda B yang bergerak dan t adalah waktu , penukaran parameter t = h(t*) berimplikasi bahwa gerak B berubah waktunya , namun lintasannya tetap sama .
Teladan 5 . Penukaran Parameter
Parabola y =
x
2 pada bidang –xy dapat dipresentasikan oleh fungsi vektorr(t) = ti + t2 j (
−
∞
<
t
<
∞
¿
jika kita ambil t = -2t* , kita memperoleh representasi lain bagi parabola yang sama :
ř(t*) = r(-2t*) = -2t* + 4t* 2 j jika kita ambil t = t* 2 , kita peroleh
namun fungsi ini merepresentasikan hanya bagian parabola yang terletak didalam kuadran pertama , sebab t* 2
≥
0
untuk semua t* .di dalam pasal berikut , kita akan melanjutkan pembahasan kita tentang kurva dengan menguak makna gemoetrik turunan suatu fungsi vektor dalam kaitan dengan tangen suatu kurva , dan dengan membahas panjang suatu kurva . ini akan mencakup pengenalan fungsi panjang busur s suatu kurva , yang ternyata merupakan suatu parameter yang sangat berguna di dalam representasi geometric .
8.4 Garis Tangen , Panjang Busur Suatu Kurva
Garis tangen sebuah kurva C dititik P dan C didefinisikan sebagai posisi limit garis lurus L yang melalui titik P dan titik lain Q pada C jika Q semakin mendekati P sepanjang kurva itu ( Gambar 187 )
Misalkan bahwa C direpresentasikan oleh sebuah fungsi vektor r(t) yang terdiferensialkan secara kontinu dengan t sembarang parameter . Jika P dan Q masing-masing adalah padanan t dan t +
∆ t
, arah L mengikuti vektor
1
Δt
+ [r(t +Δt
) – r(t) ] .Oleh karena itu , jika turunan vektor r yakni vektor
(1) r1 (t) =
lim
Δ→01
Bukan vektor nol ,ia mempunyai arah yang sama dengan garis tangen terhadap C di P . Vektor ini menunjuk kea rah naiknya nilai-nilai t , dan oleh karena itu arahnya tergantung pada orientasi kurva tersebut . vektor
r
1 dinamakan vektor tangen kurva C di P . vektor satuannya(2) u=
1
│ r
1│r
1
Dinamakan vektor tangen satuan kurva C di P . kedua vektor r1 dan u menunjuk ke arah naiknya nilai-nilai t .
Sekarang vektor posisi sebuah titik T pada garis tangen ini merupakan jumlah vektor posisi r titik P dan sebuah vektor salam arah garis tangen itu . jadi , suatu representasi parametric bagi garis tangen itu adalah ( Gambar 188 )
(3) q(w) = r +
w r
1 ,Dalam hal ini r dan r1 keduanya tergantung pada P dan parameter w merupakan suatu perubah nyata .
Teladan 1 . Garis tangen suatu elips
Tentukan garis tangen suatu elips
1
Jawab . r(t) = 2 cos t i + sin t j , sehingga
r
1 (t) =−
¿
sin t i + cos t j , dan P merupakan padanan t =π
/
4
, sebab 2 cos (π
/
4
) =√
2
. jadi , r1 (π
/
4
) = [−
√
2
,
1/√
2
] , sehingga garis tangen yang dinyatakan adalahq(w) = [
√
2
,
1/√2
] + w[−
√2
,
1/√
2
] =√2
(1- w ) i + (1/√
2
) ( 1 + w ) j .untuk mengecek hasilnya , buatlah sebuah sketsa elips dan garis tangen itu .
vektor tangen berguna bagi langkah kita selanjutnya , yaitu memperkenalkan dua konsep yang berkaitan , panjang I suatu kurva dan panjang busur s suatu kurva .
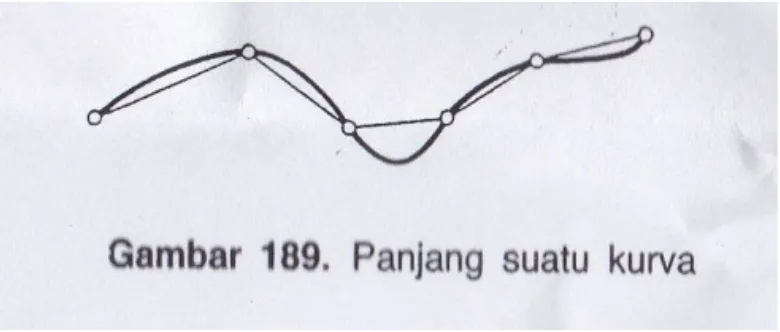
Panjang suatu kurva
Untuk mendefinisikan panjang sebuah kurva C , kita dapat menempuh jalan berikut. Kita siapkan ke dalam C suatu garis pattah – patah , yang terdiri atas n ruas garis , yang menghubungkan kedua titik ujung kurva C seperti ditunjukkab di dalam Gambar 189 . ini kita lakukan untuk setiap bilangan bulat positif n sedemikian rupa sehingga panjang ruas garis maksimum mendekati nol untuk n mendekati tak hingga . panjanggaris patah – patah itu dapat diperoleh berdasarkan teorema pitagoras . jika barisan panjang-panjang I1 , I2 , . . . itu konvergen , dengan limit I , maka C dikatakan terektifikasi atau mempunyai panjang (rectifiable ) , dan I adalah panjang kurva C
Jika c dapat direpresentasikan oleh sebuah fungsi vektor
r = r(t) (a
≤
t≤
b ) ,(4) I =
∫
ditemukan dalam Acuan [B6] di dalam Apendiks 1 . secara umum , perhitungan dengan menggunakan (4) biasanya sulit .Fungsi s(t) ini dinamakan fungsi panjang busur atau , singkatnya , panjang busur kurva C .
Dari pembahasan kita , secara geometris bahwa , untuk suatu nilai tertentu t = t0 ≥ a , panjang busur s( t0¿ adalah panjang bagian kurva C antara titik padanan t = a dengan titik padanan t= t0 . untuk t= t0 < a , kita memperoleh s( t0¿ < 0 , sehingga panjangnya adalah - s( t0¿ .
Kosnstanta a di dalam (5) dapat diganti dengan kosntanta lain ; artinya titik pada kurva padanan yang membuat s = 0 dapat dipilih sekehendak kita . arah naiknya nilai – nilai s dinamakan arah positif pada C ; dengan cara ini setiap representasi r(s) atau r(t) bagi C mendefinisakan orientasi tertentu bagi C jelaslah , ada dua cara untuk mengorientasikan C ; dan kiranya tidak sukar untuk melihat bahwa pengubahan dari orientasi yang satu ke orientasi lawannya dapat diperoleh melalui suatu transformasi , yang turunnya sangat negative , terhadap parameternya . Dari (5) kita memperoleh melalui pendiferensialan dan pengkuadratan
Dan parametric suatu kurva. Sebagai akan kita lihat , ini akan menyederhanakan berbagai rumus .
Sebagai kasus pertama yang penting , akan kita perlihatkan bahwa penggunaan s menyederhanakan rumus (2) bagi vektor tangen satuan :
(9) u(s) =
r
1(
s
)
Dengan mudah ini dapat diperoleh dari (8) dengan t = s karena ds/ds = 1 .
r*(s) = r (
s
√
a
2+
c
2 ) = a coss
√
a
2+
c
2 i + a sins
√
a
2+
c
2 j +c s
√
a
2+
c
2 k .dengan mengambil c = 0 , kita memperoleh t = s/a dan representasi
r (
s
a
) = a coss
a
i + a sins
a
j .bagi lingkaran berjari-jari a . orientasi lingkaran ini berlawanan arah dengan gerak jarum jam , yang sejalan dengan naiknya nilai-nilai s . dengan mengambil s = -s* dan dengan menggunakan rumus- rumus cos
(-
α
)
cosα
dan sin(-α
¿
= sin
α
, kita memperoleh