BAB III
TINJAUAN MENGENAI INERTIAL NAVIGATION SYSTEM
3.1 Pergerakan rotasi wahana terbang
Wahana terbang seperti pesawat terbang dan helikopter mempunyai sistem salib sumbu x, y, dan z di mana masing-masing sumbu tersebut saling tegak lurus. Dalam kondisi ideal, jika wahana terbang mengudara dalam keadaan datar, maka sumbu-sumbu wahana tersebut akan berimpit dengan sumbu X, Y, dan Z dari sistem referensi terbang. Tetapi pada kenyataannya, sangat sulit bahkan mustahil sebuah wahana terbang dapat mengudara dalam kondisi ideal, sehingga akan timbul pergerakan rotasi sumbu-sumbu wahana terbang terhadap sumbu-sumbu sistem referensi terbang. Pergerakan rotasi tersebut sering disebut roll untuk rotasi pada sumbu x, pitch untuk rotasi pada sumbu y, serta heading/yaw untuk rotasi pada sumbu z.
x y
Gambar 3.1 Pergerakan rotasi wahana terbang [www.techpubs.sgi.com]
3.1.1 Roll
Roll adalah pergerakan rotasi sumbu x wahana terbang terhadap sumbu X pada sistem referensi terbang. Sumbu x wahana terbang dapat didefinisikan sebagai garis lurus pada bidang horisontal yang melalui bagian depan (hidung) wahana hingga bagian belakang (ekor) wahana, yang membagi dua badan pesawat sama besar. Sedangkan sumbu X dari sistem referensi terbang dapat didefinisikan sebagai garis yang berimpit dengan arah terbang horisontal wahana. Pergeseran sumbu x wahana ini akan menyebabkan sumbu y dan sumbu z wahana menjadi tidak berimpit dengan sumbu Y, dan Z sistem referensi terbang dengan sudut sama besar.
3.1.2 Pitch
Pitch adalah adalah pergerakan rotasi sumbu y wahana terbang terhadap sumbu Y sistem refererensi terbang. Sumbu y wahana terbang dapat didefinisikan sebagai garis pada bidang horisontal yang tegak lurus terhadap sumbu x wahana terbang. Sedangkan sumbu Y sistem referensi terbang adalah garis yang sejajar dengan sumbu X dan Z sistem referensi.
3.1.3 Heading
Heading adalah sudut antara sumbu z wahana terbang terhadap arah utara. Sumbu z wahana terbang dapat didefinisikan sebagai garis yang tegak lurus terhadap sumbu x dan sumbu y wahana terbang.
3.2 Inertial Navigation System
Intertial Navigation System atau INS adalah suatu sistem navigasi yang mampu mendeteksi perubahan geografis , perubahan kecepatan, serta perubahan orientasi dari suatu benda. INS banyak diaplikasikan pada objek-objek bergerak seperti pesawat terbang, kapal selam, kapal laut, pesawat ruang angkasa, dan peluru kendali.
Gambar 3.2. Inertial Navigation System [courses.cs.tamu.edu]
INS adalah alat navigasi yang digunakan pada wahana terbang pada umumnya sebelum teknologi GPS. Sistem ini mampu mengukur besar perubahan sudut orientasi wahana terbang terhadap arah utara, besar pergerakan sudut rotasi wahana terbang terhadap sumbu-sumbu horisontalnya, percepatan wahana terbang, hingga temperatur dan tekanan udara di sekitar wahana terbang. Dari hasil pengukuran yang dapat dilakukan oleh INS, maka dapat dihasilkan informasi berupa orientasi tiga dimensi serta posisi wahana terbang.
INS terdiri dari dua komponen utama, yaitu Inertial Measurement Unit atau IMU, serta Navigation Processor atau NP.
3.2.1 Inertial Measurement Unit
Inertial Measurement Unit atau IMU adalah suatu komponen dalam INS yang berfungsi untuk melakukan pengukuran terhadap pergerakan rotasi wahana terbang terhadap sumbu terbang (x,y,z) . IMU terdiri dari tiga buah accelerometer, tiga buah gyroscope, serta perangkat elektronik untuk merekam data dalam bentuk digital. Accelerometer dan Gyroscope tersebut diletakkan pada posisi sedemikian rupa sehingga dapat mendeteksi perubahan arah, kecepatan, dan rotasi.
Prinsip kerja dari IMU adalah berdasarkan pengertian dari inersia. Berdasarkan hukum I Newton yang menyatakan “Setiap benda akan tetap berada dapa keadaan diam atau gerak lurus beraturan, kecuali jika benda tersebut dipaksa untuk mengubah keadaan tersebut oleh gaya-gaya yang dikerjakan padanya”. Sehingga inersia didefinisikan sebagai sifat bahwa benda akan tetap berada pada keadaannya, yaitu diam atau bergerak lurus beraturan. Inersia adalah sifat benda yang menyatakan hambatannya terhadap perubahan gerak.
3.2.1.1 Accelerometer
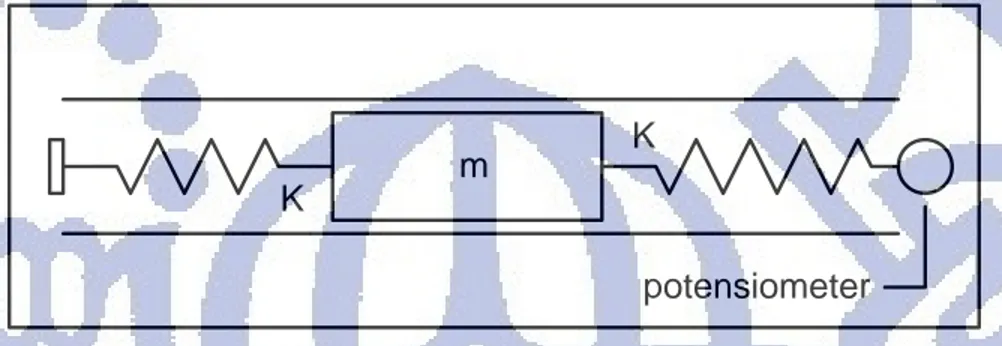
Accelerometer adalah alat untuk mendeteksi perubahan percepatan linear suatu benda. Percepatan yang dapat diketahui adalah perubahan kecepatan suatu wahana terbang serta percepatan gravitasi di titik tersebut. Dengan accelerometer perubahan kecepatan dari wahana terbang dapat diketahui. Gambar 3.3 menjelaskan bagian-bagian dari accellerometer.
m K
K
potensiometer
Gambar 3.3 Accellerometer
Acceleratometer sederhana adalah sebuah sistem yang terdiri dari satu massa (m) yang diikatkan pada dua pegas dengan konstanta pegas (K) pada kedua sisinya. Selain itu, massa (m) juga dihubungkan dengan sebuat potensiometer. Massa (m) dan pegas dapat berosilasi sepanjang garis lurus pada sebuah celah yang diasumsikan tanpa gesekan sebagai sumbu osilasi. Apabila massa m dan pegas dalam keadaan diam, maka didefinisikan bahwa massa (m) pada posisi setimbang, di mana besar pergeserannya nol. Jika suatu gaya bekerja pada sistem yang mengakibatkan massa (m) bergeseer dari posisi setimbangnya sebesar Δs, maka potensiometer akan dapat mengukur percepatan dari osilasi massa (m).
3.2.1.2 Gyroscope
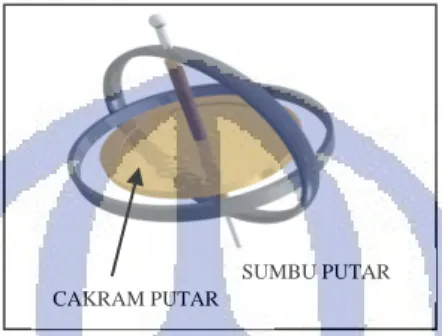
Gyroscope adalah alat untuk mendeteksi perubahan sudut akibat pergerakan rotasi terhadap sumbu-sumbu dari suatu benda. Cara kerja dari gyroscope adalah berdasarkan prinsip momentum sudut. Gyroscope terdiri dari sebuah cakram berputar dengan sumbu-sumbu yang tidak terikat.
Gambar 3.4 Gyroscope
Ketika cakram berputar, maka sumbu putarnya akan selalu mengarah pada posisi vertikal seperti pada prinsip momentum angular. Karena sumbu-sumbu dari gyroscope bebas bergerak ke arah manapun, maka akan dapat dideteksi perubahan sudut sumbu-sumbu dari gyroscope terhadap arah sumbu putar dari cakram.
Beberapa gyroscope yang digunakan pada objek yang bergerak dilengkapi dengan kompas dan umum disebut gyrocompass. Gyrocompass dapat mendeteksi perubahan sudut akibat pergerakan rotasi, serta arah pergerakan suatu objek.
3.2.2 Navigation Processor
Navigation Processor atau NP. Alat ini berfungsi untuk menyelesaikan rumus Newton untuk pergerakan IMU terhadap bumi yang berputar, berdasarkan pengukuran percepatan dan pergerakan rotasi. Dengan kata lain NP menyelaraskan sumbu-sumbu koordinat lokal (x,y,z) pada objek yang bergerak dengan sumbu-sumbu di permukaan bumi. Tahapan yang dilakukan adalah :
CAKRAM PUTAR
1. Leveling, yaitu menentukan arah vertikal (sumbu z) dari koordinat lokal, dengan mengasumsikan bahwa arah z negatif sama dengan garis gaya berat lokal di titik tersebut.
2. Heading alignment, yaitu menentukan arah depan (sumbu x) dari koordinat lokal, dengan menggunakan gyrocompass.
3.3 Ketelitian Inertial Navigation System
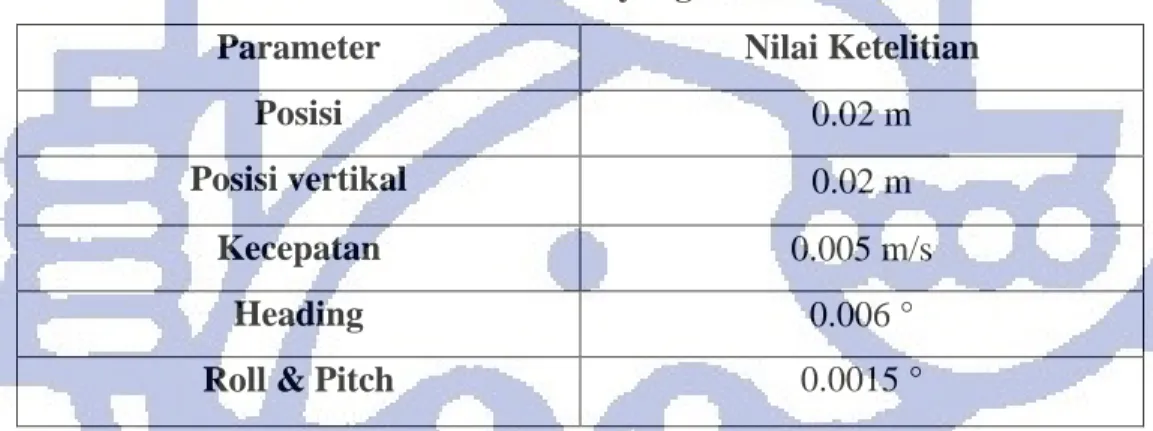
Dengan teknologi saat ini, antara lain penggunaan gyroscope laser yang lebih akurat jika dibandingkan dengan gyroscope konvensional, INS memiliki ketelitian yang sangat tinggi dalam pengukuran pergerakan rotasi, percepatan, dan kecepatan wahana udara. Tabel 3.1 menunjukkan nilai ketelitian tertinggi dari beberapa jenis INS saat ini.
Tabel 3.1 Ketelitian data yang dihasilkan INS
Parameter Nilai Ketelitian
Posisi 0.02 m
Posisi vertikal 0.02 m
Kecepatan 0.005 m/s
Heading 0.006 °
Roll & Pitch 0.0015 °
Sumber : www.oxts.co.uk
3.4 INS untuk Airborne LIDAR System
Pada sistem airborne LIDAR, INS memiliki fungsi untuk mengukur pergerakan rotasi wahana terbang terhadap sumbu-sumbu terbang. Pergerakan rotasi tersebut adalah pitch, roll, dan heading. Pada saat ini ,terdapat beberapa jenis INS yang digunakan untuk survey airborne LIDAR, antara lain :
OXTS RT4000
INS RT4000 menggunakan komponen dengan teknologi terbaru. Data dari alat ini diupdate dengan kecepatan 250 Hz. Alat ini memiliki tingkat akurasi pengukuran yang tinggi, seperti yang dapat dilihat dalam tabel 3.2.
Gambar 3.5 INS OXTS RT4000 [www.oxts.co.uk]
Tabel 3.2 Spesifikasi keakurasian INS RT4000
Parameter Tingkat keakurasian
Posisi Horisontal 0.02 m
Posisi Vertikal 0.02 m
Kecepatan 0.05 km/h
Percepatan Linier 0.01 m/s2
Heading 0.1°
Pitch & Roll 0.03°
Percepatan sudut 0.01 °/s
Sumber : www.oxts.co.uk
iNAV-RQH-0018
INS ini memiliki ketelitian yang sangat tinggi serta mampu mengupdate data dengan kecepatan 2000 Hz (2 kHz).
Tabel 3.3 Spesifikasi keakurasian INS iNAV-RGH-0018
Parameter Nilai Keakurasian
Posisi horisontal 0.02 m
Posisi vertikal 0.02 m
Kecepatan 0.005 m/s
Heading 0.006 °
Roll & Pitch 0.0015 °
Sumber : www.imar-navigation.de
Gambar 3.6 INS iNAV-RQH-0018 [www.imar-navigation.de]
Northop Grumman INS
Alat ini menggunakan ring laser gyroscope, yang memiliki ukuran kecil dan akurasi yang baik. Selain itu, Northop Grumman INS juga mampu menghilangkan noise dari percepatan dan kecepatan wahana udara.
Gambar 3.7 High Accuracy INS Northop Grumman [www.northropgrumman.com]
![Gambar 3.1 Pergerakan rotasi wahana terbang [www.techpubs.sgi.com]](https://thumb-ap.123doks.com/thumbv2/123dok/2098550.2151714/1.918.227.664.687.929/gambar-pergerakan-rotasi-wahana-terbang-www-techpubs-sgi.webp)
![Gambar 3.2. Inertial Navigation System [courses.cs.tamu.edu]](https://thumb-ap.123doks.com/thumbv2/123dok/2098550.2151714/3.918.242.679.359.571/gambar-inertial-navigation-system-courses-cs-tamu-edu.webp)
![Gambar 3.5 INS OXTS RT4000 [www.oxts.co.uk]](https://thumb-ap.123doks.com/thumbv2/123dok/2098550.2151714/8.918.145.758.297.840/gambar-ins-oxts-rt-www-oxts-co-uk.webp)

