SISTEM PENGUKUR JARAK LINTASAN PADA MOBILE ROBOT
Teks penuh
Gambar

Garis besar
Dokumen terkait
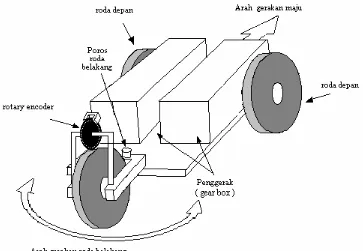
Projek ini adalah gabungan " mobile robot " bersama aplikasi sistem pengukuran paras lantai. "Mobile Robot" mempunyai keupayaan untuk bergerak dikawasan
Perancangan robot line follower ini tidak hanya sekedar mengukuti garis lintasan nya saja, tetapi dapat menemukan pencarian jalan terpendek pada lintasan berupa labirin
Pada Tugas Akhir ini dirancang mobile robot yang telah terintegrasi dengan sebuah aplikasi sistem monitoring pada smartphone Android yang dapat mengontrol gerak
Dari hasil pengimplementasian perencanaan lintasan pada mobile robot Qbot menggunakan metode Radial Basis Function dengan kontroler PID Fuzzy dapat disimpulkan bahwa plant
Kendali proportional yang telah dirancang diterapkan pada sistem mobile robot-3 Trailers dengan lintasan yang memiliki sudut yang bervariasi dapat dilihat pada
Sistem navigasi waypoint dirancang agar autonomous mobile robot mampu mengenali posisi dan arah berdasarkan sistem koordinat Bumi, mampu malakukan koreksi arah gerak
Diagram alir sistem dengan penghalang Maka pada sistem dengan objek penghalang didapatkan hanya dua parameter akhir yaitu sudut mobile robot dengan target (sudut_tu) dan
Cara kerja alat pengukur suhu tubuh otomatis ini adalah saat ada objek yang bergerak dengan jarak kurang dari 2 meter, Sensor PIR akan menangkap pancaran infra
