BAB II
TEORI DASAR
2.1 Gempa Bumi Vulkanik
Gempa vulkanik adalah gempa yang disebabkan oleh kegiatan Gunung api. Magma yang berada pada kantong di bawah gunung tersebut mendapat tekanan dan melepaskan energinya secara tiba-tiba sehingga menimbulkan getaran tanah. Aktivitas magma yang naik ke permukaan yang akan menimbulkan gempa -gempa kecil yang bisa terjadi sebelum Gunung api meletus.
Gempa vulkanik terjadi karena adanya tekanan gas dan batuan yang telah mencair dan panas atau yang biasa disebut magma berusaha melepaskan energinya sehingga menimbulkan getaran tanah yang hanya dirasakan di lereng atau daerah sekitar gunung [19].
Gempa yang terjadi di Gunung Api Merapi memiliki bermacam-macam jenis dan penyebabnya. [2] Gempa vulkanik dapat diklasifikasikan sebagai berikut:
a. Gempa VT-A
Gempa VT-A (Vulkano-Tektonik tipe A) merupakan gempa yang terjadi pada kedalaman lebih dari 2 km dari puncak Gunung Api Merapi dengan frekuensi sekitar 5-8 Hz yang dicatat pada ketinggian 2645 meter. Gempa ini memiliki gelombang P dan S yang mudah dibedakan, dengan waktu tiba gelombang P lebih cepat sekitar 0.5 detik dibanding gelombang S. Perekaman gempa jenis ini akan menunjukkan nilai yang lebih besar jika dilakukan pada ketinggian yang lebih rendah. Gempa VT-A merupakan gempa yang terekam pada hampir semua stasiun pengamat di Gunung Api dan sekaligus merupakan gempa yang memiliki magnitudo paling besar. (Gambar 2.1)
Gambar 2. 1 Bentuk sinyal gempa VT – A [2]
b. Gempa VT-B (Vulkano-Tektonik tipe B)
Gempa VT-B (Vulkano-Tektonik tipe B) merupakan gempa yang sumber gempanya memiliki kedalaman kurang dari 2 km dari puncak dengan frekuensi dominan sekitar 4 – 7 Hz. Secara garis besar, gempa VT-B mirip dengan gempa VT-A namun letak gelombang P dan S tidak dapat dibedakan secara jelas. Ciri utama dari gelombang ini yaitu bentuknya yang mirip dengan kapak. Karena sumber gempanya yang memiliki kedalaman kurang dari 2 km, maka stasiun yang relatif dekat dengan puncak gunung akan merekam gempa VT-B dengan magnitudo yang lebih besar dibanding stasiun yang berada di lereng bawah(Gambar 2.2).
c. Gempa MP
Gempa MP (Multi-Phase/Berfase Banyak) merupakan gempa yang disebabkan oleh pembentukan kubah lava dan terjadi di puncak pada kubah lava. Ketika kubah lava bertumbuh cepat, maka intensitas gempa akan semakin tinggi (semakin sering terjadi). Gempa ini memiliki frekuensi 3-4 Hz dengan ciri amplitudo yang bersifat gradual(Gambar 2.3).
Gambar 2. 3 Bentuk sinyal gempa MP [2]
d. Gempa LF
Gempa LF (Low Frequency) merupakan gempa yang memiliki amplitudo relatif kecil sehingga hanya bisa direkam dengan jelas oleh stasiun dengan elevasi tinggi. Gempa ini memiliki frekuensi sekitar 1.5 Hz dengan durasi gempa yang sangat pendek. Pembacaan gempa LF akan optimum jika dilakukan menggunakan seismograf yang ditanam pada batuan beku ekstrusi. (Gambar 2.4).
Gambar 2. 4 Bentuk sinyal gempa Low frequency [2]
e. Gempa Tremor
Gempa tremor merupakan gempa yang disebabkan adanya pergerakan magma dari dalam bumi menuju ke permukaan. Pergerakan ini menimbulkan getaran yang akhirnya tercatat pada seismograf gempa tremor terdiri atas dua jenis yakni tremor berfrekuensi rendah dan tremor berfrekuensi tinggi. Gempa tremor berfrekuensi rendah mengindikasikan bahwa pergerakan magma masih jauh dari puncak gunung. Akibatnya, frekuensi dari amplitudo yang terekam relatif lebih kecil. Gempa ini mirip dengan gempa LF, namun memiliki durasi yang jauh lebih lama. Adapun gempa tremor berfrekuensi tinggi menunjukkan bahwa pergerakan magma lebih mendekati atau mencapai puncak gunung dan biasa terjadi ketika gunung mengalami erupsi (Gambar 2.5).
2.2 Pemantauan Aktivitas Seismik Gunung Api
Letusan gunung api sebenarnya disebabkan oleh gaya yang berasal dari dalam bumi akibat terganggunya sistem kesetimbangan magma (kesetimbangan suhu, termodinamika dan hidrostatik) dan sistem kesetimbangan geologi (kesetimbangan gaya tarik bumi, kimia-fisika, dan panas bumi).
Pergerakan magma dan fluida pada aktivitas gunung api dapat memicu terjadinya gempa bumi. Aktivitas gempa bumi di bawah gunung api akan meningkat sebelum terjadinya erupsi karena cairan magma dan gas yang mendorong ke permukaan melalui rekahan pada dinding gunung api. Proses pergerakan magma ke permukaan bumi dapat dilihat pada Gambar 2.6.
Gambar 2. 6 Proses pergerakaan magma ke permukaan sebagai penyebab terjadinya gempa vulkanik
Ketika terjadi perpindahan magma dan gas vulkanik menuju ke dekat permukaan akan menyebabkan perubahan tekanan di bawah permukaan gunung api sehingga menimbulkan retakan hingga pecahnya batuan. Retakan atau pun pecahnya batuan ini merupakan sumber getaran.
Magma yang mengandung gas, sedikit demi sedikit naik ke permukaan karena massanya yang lebih ringan dibanding batu-batuan padat di sekelilingnya. Sehingga menyebabkan gempa vulkanik yang menyebabkan rekahan-rekahan pada dinding magma. Rekahan akibat desakan magma ini menyebabkan sumbat magma runtuh dan air yang berada diatas sumbat masuk ke magma dan mendidih dengan cepat. Tekanan uap akibat air yang mendidih
inilah yang dapat menimbulkan ledakan sehingga tekanan magma ke atas menjadi lebih mudah karena adanya retakan pada sumbat magma. Seluruh air yang menyentuh magma langsung berubah menjadi uap yang bertekanan tinggi sehingga tekanan magma yang mendesak ke atas semakin tak terbendung. Apabila tekanan magma cukup besar maka akan terjadi letusan magmatik yang menyebabkan dinding kawah runtuh. Letusan ini dapat menyebabkan keluarnya lahar, material vulkanik bercampur air, debu, dan awan vulkanik [1]. Gempa vulkanik biasa terjadi sebelum, sesaat maupun sesudah letusan. Tetapi gejala tersebut tidak selalu sama pada tiap-tiap gunung api. Meskipun gunung api mempunyai batuan penyusun yang sama, bahkan pada gunung api yang sama sekalipun, gejala kegempaan sehubungan dengan letusan tidak selalu sama. Perbedaan gejala tersebut disebabkan oleh struktur batuan masing–masing gunung api. Sedangkan perubahan gejala mungkin karena perubahan kekentalan magma, proses mineralisasi dalam magma ketika terjadi pendinginan dalam perjalanannya menuju ke permukaan bumi yang dapat merubah mekanisme letusan dan masih banyak kemungkinan – kemungkinan lainnya [18].
2.3 Penentuan Parameter Pusat Gempa
Hiposenter adalah titik awal terjadinya gempa bumi yang terdapat di bagian dalam bumi. Kedalaman sumber gempa bumi adalah jarak hiposenter dihitung tegak lurus dari permukaan bumi. Sedangkan episenter adalah proyeksi hiposenter pada permukaan bumi. Hubungan antara hiposenter dan episenter dapat dilihat pada Gambar 2.7.
Gambar 2. 7 Gambaran titik hiposenter (F) dengan kedalaman (h), jarak episenter (∆) dan jarak hiposenter (D). S adalah stasiun pengamatan dan E
Jarak tempuh gelombang P dan S dari hiposenter (F) ke stasiun (S) adalah D:
𝐷 = 𝑉𝑝(𝑡𝑝− 𝑡0) ; 𝐷 = 𝑉𝑠(𝑡𝑠− 𝑡0) (2.1)
Secara matematis hubungan antara jarak tempuh (D) dan S-P adalah:
𝐷 = 𝑘 × 𝑡𝑠𝑝 (2.2)
dimana, 𝑘 =𝑉𝑝×𝑉𝑠
𝑉𝑝−𝑉𝑠 (2.3)
Dimana 𝑘 adalah koefisien jarak dan nilai tetapan dari konstanta Omori, 𝑉𝑝 dan 𝑉𝑠 adalah kecepatan gelombang primer dan sekunder, 𝑡0 adalah waktu terjadinya gempa bumi, 𝑡𝑠𝑝 adalah selisih waktu tiba gelombang P dan S, sedangkan 𝑡𝑝 dan 𝑡𝑠 adalah waktu tiba gelombang primer dan sekuder.
Terdapat beberapa metode yang dapat digunakan untuk menentukan posisi hiposenter dari suatu gempa diantaranya adalah Metode Wadati, dan Metode Geiger, sedangkan untuk melakukan relokasinya digunakan Metode Coupled
Velocity-Hypocenter.
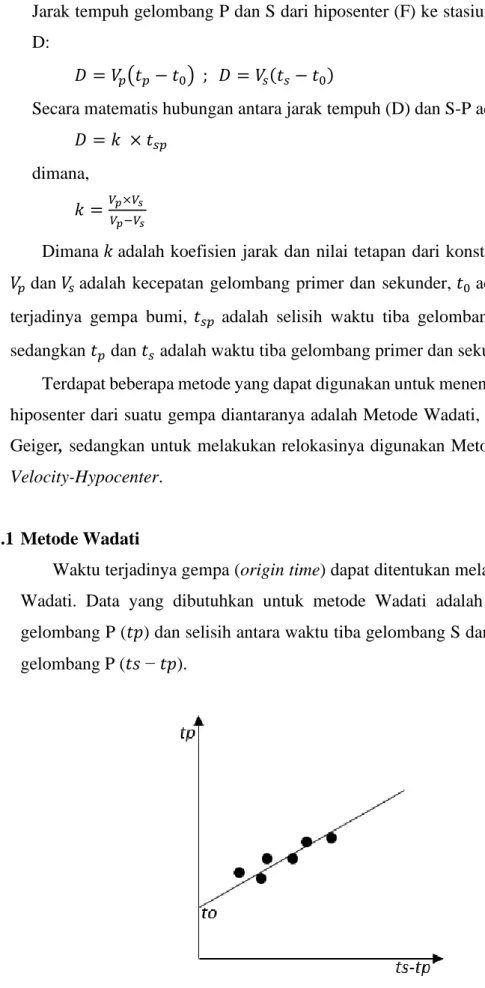
2.3.1 Metode Wadati
Waktu terjadinya gempa (origin time) dapat ditentukan melalui diagram Wadati. Data yang dibutuhkan untuk metode Wadati adalah waktu tiba gelombang P (𝑡𝑝) dan selisih antara waktu tiba gelombang S dan waktu tiba gelombang P (𝑡𝑠 − 𝑡𝑝).
Bentuk umum persamaan linier dapat dinyatakan sebagai 𝑦 = 𝐴𝑥 + 𝐵 , dimana 𝑥 dan 𝑦 merupakan nilai 𝑡𝑠 − 𝑡𝑝 dan 𝑡𝑝. (Gambar 2.8)
𝑡𝑝= 1 𝑉𝑝𝑘(𝑡𝑠 − 𝑡𝑝) + 𝑡0 (2.4) Atau 𝑡0 = 𝑡𝑝 − (𝑡𝑠 − 𝑡𝑝)𝑉𝑝1 𝑉𝑠−1 (2.5)
Origin time adalah waktu terjadinya gempa di fokus. Slope garis
tersebut adalah 1
𝑉𝑝 , sehingga jarak hiposenter gempa bumi (𝐷) dapat dicari
dengan persamaan: 𝐷 = 𝑉𝑝(𝑡𝑝 − 𝑡0) (2.6) Dimana: 𝑉𝑝 : Kecepatan gelombang P 𝑉𝑠 : Kecepatan gelombang S 2.3.2 Metode Geiger
Metode Geiger menggunakan data waktu tiba gelombang P dan atau gelombang S. Asumsi yang digunakan adalah bahwa bumi terdiri dari lapisan datar yang homogen, sehingga waktu tiba gelombang gempa yang karena pemantulan dan pembiasan untuk setiap lapisan dapat dihitung. Cara yang digunakan dengan memberikan estimasi awal hiposenter, kemudian menghitung waktu rambat gelombang untuk setiap stasiun yang digunakan. Dari perhitungan ini didapatkan residu, yaitu perbedaan antara waktu rambat gelombang yang diamati (data observasi) dengan waktu rambat gelombang yang dihitung (data kalkulasi) untuk setiap stasiun.
Geiger’s Adaptive Damping (GAD) [14], merupakan salah satu software
yang umum digunakan untuk penentuan posisi hiposenter terutama dalam penentuan lokasi hiposenter gempa di daerah Gunung Api atau pada daerah yang mempunyai jarak yang relatif dekat antara sumber gempa dan penerima (receiver). Data yang harus dipersiapkan untuk menjalankan program ini adalah data waktu tiba, posisi seismometer dan struktur kecepatan.
Beberapa model sintetis dikembangkan untuk verifikasi program GAD, sehingga dapat diketahui pengaruh input data, terutama data waktu tiba, terhadap output yang berupa posisi sumber gempa. Permasalahan dalam penentuan waktu tiba pada model terletak dalam penentuan waktu tempuh gelombang. Penentuan waktu tempuh gelombang ditentukan dari lintasan perambatan gelombang (raypath) dari sumber ke penerima.
Penentuan hiposenter dengan Metode Geiger dilakukan dengan menggunakan perangkat lunak Geiger Adaptive Damping memerlukan nilai waktu tiba gelombang P dan gelombang S, nilai koordinat stasiun serta model kecepatan lapisan. Metode Geiger berprinsip bahwa nilai residual dari waktu tiba pengamatan akan linier dengan waktu tiba teoritis yang terjadi selama penjalaran gelombang dari sumber gempa bumi menuju ke stasiun yang dituliskan berikut[13]:
𝑇𝑔,𝑤𝑜𝑏𝑠 ≅ 𝑇𝑔,𝑤𝑡𝑒𝑜(𝑥𝑔, 𝑦𝑔, 𝑧𝑔, 𝑋, 𝑌, 𝑍, 𝑇) (2.7) Dimana,
𝑇𝑔,𝑤𝑜𝑏𝑠 = waktu tiba observasi
𝑇𝑔,𝑤𝑡𝑒𝑜 = waktu tiba teoritis
𝑥𝑔, 𝑦𝑔 , 𝑧𝑔 =koordinat hiposenter
𝑋, 𝑌, 𝑍 = koordinat stasiun pengamatan
𝑇 = waktu tiba gelombang dari hiposenter ke stasiun
Pada program GAD, lokasi hiposenter berada di dekat stasiun yang waktu kedatangan gelombang P yang tercepat ditetapkan sebagai perkiraan pertama secara default. Iterasi berakhir ketika koreksi menjadi kurang dari 0,001 km atau 0,001 detik. Dan itu juga berakhir ketika jumlah iterasi melebihi 50. Ini kondisi dapat diubah oleh parameter dx, dy, dz, dt dan iterasi maksimum dari algoritma Geigernya [12].
Sistem koordinat yang digunakan pada program GAD menggunakan koordinat kartesian. Koordinat hiposenter gempa bumi adalah (𝑥0, 𝑦0, 𝑧0, 𝑡0)
dimana 𝑥0, 𝑦0 dan 𝑧0 adalah koordinat spasial dan 𝑡0 adalah origin time.
Sedangkan untuk koordinat stasiun diumpamakan (𝑥𝑖, 𝑦𝑖, 𝑧𝑖), dimana kita
waktu tiba yang sesuai adalah 𝑡1𝑎𝑟𝑟 . Visualisasinya dapat dilihat pada Gambar 2.9.
Gambar 2. 9 Visualisasi Metode Geiger yang paling sederhana yaitu untuk kasus model bumi homogen sehingga lintasan sinar
seismik bisa digambarkan sebagai garis lurus
Untuk memberikan koordinat spasial, perbedaan antara waktu tiba observasi (𝑡𝑖𝑜𝑏𝑠) dan kalkulasi (𝑡𝑖𝑐𝑎𝑙) adalah:
𝑟𝑖 = 𝑡𝑖𝑜𝑏𝑠 − 𝑡𝑖𝑐𝑎𝑙 = 𝑡𝑖𝑜𝑏𝑠− (𝑡𝑖𝑡𝑟𝑎− 𝑡0) (2.8)
Dimana,
𝑡𝑖𝑐𝑎𝑙 = 𝑡𝑖𝑡𝑟𝑎(𝑥𝑖, 𝑦𝑖,𝑧𝑖, 𝑥0, 𝑦0,𝑧0) + 𝑡0 = 𝑡𝑖𝑡𝑟𝑎 + 𝑡0 (2.9)
Fungsi waktu tiba gelombang yang digunakan untuk menggambarkan model harus disederhanakan baik untuk alasan teoritis dan / atau praktis. Sebagai contoh, persamaan berikut ini adalah fungsi waktu kedatangan untuk model kecepatan yang homogen[21]:
𝑡𝑖𝑡𝑟𝑎 =1
𝑣√(𝑥0− 𝑥𝑖) 2+ (𝑦
0− 𝑦𝑖)2+ 𝑧02 (2.10)
Parameter model yang tidak linier dapat didekati dengan memakai ekspansi Taylor orde pertama g(m) di sekitar model awal m0. Sehingga
𝑑 = 𝑔(𝒎0) + 𝑱0∆𝒎0 (2.10)
Maka untuk model yang tidak linier persamaannya menjadi : 𝑟𝑖 =𝜕𝑡𝑖𝑡𝑟𝑎 𝜕𝑥0 ∆𝑥 + 𝜕𝑡𝑖𝑡𝑟𝑎 𝜕𝑦0 ∆𝑦 + 𝜕𝑡𝑖𝑡𝑟𝑎 𝜕𝑧0 ∆𝑧 + ∆𝑡 (2.11)
Bentuk matriks dari hubungan persamaan antara data dan model adalah :
[ 𝑟1 𝑟2 … ⋯ 𝑟𝑛] = [ 𝜕𝑡1𝑡𝑟𝑎 𝜕𝑥0 𝜕𝑡1𝑡𝑟𝑎 𝜕𝑦0 𝜕𝑡1𝑡𝑟𝑎 𝜕𝑧0 1 𝜕𝑡2𝑡𝑟𝑎 𝜕𝑥0 𝜕𝑡2𝑡𝑟𝑎 𝜕𝑦0 𝜕𝑡2𝑡𝑟𝑎 𝜕𝑧0 1 ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ 𝜕𝑡𝑛𝑡𝑟𝑎 𝜕𝑥0 𝜕𝑡𝑛𝑡𝑟𝑎 𝜕𝑦0 𝜕𝑡𝑛𝑡𝑟𝑎 𝜕𝑧0 1 ] × [ ∆𝑥 ∆𝑦 ∆𝑧 ∆𝑡 ] (2.13).
2.3.3 Metode Coupled Velocity-Hypocenter
Model kecepatan gelombang seismik bawah permukaan yang digunakan adalah model 1-D, hal ini dilakukan sebagai bentuk penyederhanaan masalah terhadap model bawah permukaan sebenarnya. Model kecepatan gelombang seismik 1-D biasa digunakan sebagai prosedur dalam penentuan lokasi gempa dan sebagai inisial model untuk seismik tomografi [8]. Model 1-D mengadopsi nilai kecepatan a priori tetapi termasuk koreksi stasiun optimal dan hiposenter, seperti yang dilakukan dengan model 1-D minimum [9].
Salah satu metode penentuan model kecepatan gelombang seismik 1-D, adalah metode coupled velocity-hypocenter menggunakan program VELEST. Metode coupled velocity hypocenter merupakan metode relokasi gempa, penentuan model kecepatan gelombang seismik bawah permukaan 1-D, dan koreksi stasiun secara bersamaan menggunakan prinsip metode Geiger.
Perolehan model kecepatan yang telah diperbaharui menggunakan persamaan [9]: 𝑟 = 𝑡𝑜𝑏𝑠− 𝑡𝑐𝑎𝑙 = ∑ 𝜕𝑓 𝜕ℎ𝑘∆ℎ𝑘+ ∑ 𝜕𝑓 𝜕𝑚𝑖∆𝑚𝑖 + 𝑒 𝑛 𝑖=1 4 𝑘=1 (2.14) Keterangan:
Tobs = waktu tempuh observasi (s) Tcal = waktu tempuh kalkulasi (s) f = fungsi terhadap lokasi stasiun
h = lokasi hiposenter waktu tiba/ origin time (km) m = model kecepatan (km/s)
e = error dari waktu tiba perhitungan maupun perhitungan k = jumlah hiposenter
i = jumlah stasiun
Nilai error (e) diperoleh dari proses pengamatan dan perhitungan juga dapat dihitung dengan menggunakan least squares dan untuk menentukan jumlah residual RMS dengan mengakarkan error (e) dari waktu tiba terhadap banyaknya data (n), dinyatakan dalam persamaan berikut:
𝑒 = ∑ 𝑟𝑛𝑖 𝑖2= ∑ (𝑡𝑜𝑏𝑠 − 𝑡𝑐𝑎𝑙)𝑛𝑖 2 (2.15)
Dalam tahapan berikutnya, nilai-nilai tersebut digunakan dalam forward modeling untuk memperoleh nilai tcal baru yang akan dibandingkan misfitnya dengan tcal sebelumnya. Tahapan tersebut merupakan tahapan dalam VELEST untuk satu iterasi. Dalam setiap iterasinya, tercantum nilai RMS antara data waktu tempuh observasi dan waktu tempuh perhitungan, sehingga jumlah iterasi dapat diatur hingga memenuhi kriteria RMS yang diharapkan.
Inverse modeling dilakukan dengan menyelesaikan Matriks Damped Least Square [𝐴𝑇𝐴 + 𝐿 ] (A=Matriks Jacobian, [ 𝐴𝑇=Transpose Matriks Jacobian; L=Matriks damping). Penggunaan nilai damping akan mempengaruhi nilai perturbasi parameter model (∆m), dengan hubungan antara besarnya damping dan nilai ∆m adalah berkebalikan. Hasil dari inverse modeling adalah vektor perbaikan parameter model (∆m) yang selanjutnya diperoleh nilai parameter hiposenter, model kecepatan gelombang seismik 1-D, dan koreksi stasiun.
Penyelesaian permasalahan dengan program VELEST menggunakan ray
tracing dari sumber ke penerima yaitu, perhitungan gelombang langsung
(direct wave), gelombang dibiaskan (refracted wave), dan gelombang dipantulkan (reflected wave) melewati model 1-D. Program VELEST melakukan perhitungan secara iteratif yaitu non-linier.
![Gambar 2. 2 Bentuk sinyal gempa VT – B [2]](https://thumb-ap.123doks.com/thumbv2/123dok/4599015.3354984/2.892.381.636.804.1104/gambar-bentuk-sinyal-gempa-vt-b.webp)
![Gambar 2. 3 Bentuk sinyal gempa MP [2]](https://thumb-ap.123doks.com/thumbv2/123dok/4599015.3354984/3.892.350.661.375.689/gambar-bentuk-sinyal-gempa-mp.webp)
![Gambar 2. 4 Bentuk sinyal gempa Low frequency [2]](https://thumb-ap.123doks.com/thumbv2/123dok/4599015.3354984/4.892.385.639.141.422/gambar-bentuk-sinyal-gempa-low-frequency.webp)