1
Naskah diterima: 18 Februari 2011, dinyatakan layak muat : 20 April 2011METODA PENENTUAN NILAI FREKUENSI DAN NILAI KAPASITOR
MINIMUM GENERATOR INDUKSI PHASA TIGA
BERPENGUATAN SENDIRI
Zuhaidi1, Rina Irawati1, dan Azri2
1)Pusat Penelitian dan Pengembangan Teknologi Ketenagalistrikan, Energi Baru, Terbarukan dan Konservasi energi
Jl. Ciledug Raya Kav. 109, Telp. (021) 7203530, Cipulir Keb. Lama, Jakarta Selatan 2) Universitas Andalas Padang
ABSTRAK
Kebutuhan akan pembangkit energi non-konvensional membuat generator induksi mendapat prioritas karena biaya yang lebih murah, brushless rotor dan juga tak memerlukan sumber DC. Untuk menjadikan generator induksi ber-eksitasi sendiri, dibutuhkan kapasitor sebagai sumber eksitasi, yang besarnya dapat ditentukan dengan metoda impedansi loop. Penentuan nilai kapasitor dengan menggunakan metoda impedansi loop akan menghasilkan dua buah persamaan real dan imajiner. Selanjutnya dapat ditentukan nilai frekuensi dan nilai kapasitor minimum yang diperlukan untuk masing-masing nilai reaktansi magnetisasi jenuh dan reaktansi megnetisasi maksimum. Pengujian dilakukan pada kecepatan 0.8, 0.9, 1 pu dan tahanan beban 1.25, 1,838, ∞ pu. Hasil yang didapatkan menunjukan bahwa frekuensi berbanding lurus dengan tahanan beban dan kecepatan putar generator sedangkan nilai kapasitor berbanding terbalik dengan tahanan beban dan kecepatan putar generator.
Kata Kunci : Pembangkit energi non-konvensional, Self-Excited Induction Generator, frekuensi, kapasitor
ABSTRACT
The need for non-conventional energy generation makes the induction generator to get a good priority, because of lower cost, brushless rotor and also do not require a DC source. To make self-excitation induction generator (SEIG), it takes a capacitor as a source of excitation, which amount can be determined by using the loop impedance method. Determination the value of the capacitor using loop impedance method will produce two pieces of real and imaginary equations. Furthermore, the frequency value can be determined and the minimum capacitor value required for saturated magnetization reactance and the reactance megnetisasi maximum respectively. Tests are conducted at a speed of 0.8, 0.9, 1 pu and the load resistance 1:25, 1.838, ∞ pu. The results obtained showed that the frequency is proportional to the resistance load and rotational speed generator while the value of the capacitor is inversely proportional to the resistance load and rotational speed generator.
Key Words: non-conventional energy plant, Self-Excited Induction Generators, frequency, capacitor
PENDAHULUAN
Latar BelakangGenerator induksi mempunyai konstruksi dan operasi yang mirip dengan motor induksi. Jika motor induksi berputar pada kecepatan yang sedikit lebih rendah dari kecepatan sinkronnya, maka motor akan memberikan daya dari sumber AC untuk menggerakkan beban. Jika beban diganti dengan penggerak utama dan rotor diputar dengan kecepatan di atas kecepatan sinkronnnya, maka motor akan beroperasi sebagai generator induksi dan mencatu daya ke busbar atau jaringan sementara pada saat yang sama mengambil arus magnetisasi atau daya reaktif dari busbar.
Generator induksi mempunyai beberapa keterbatasan, karena tidak ada rangkaian medan eksitasi yang terpisah dari rangkaian jangkar, sehingga generator tidak dapat menghasilkan daya reaktif. Kenyataannya, generator ini menyerap daya reaktif, karena itu suatu sumber daya reaktif eksternal harus dihubungkan ke generator setiap waktu untuk mendapatkan medan magnetik pada statornya, dengan demikian motor induksi dapat berfungsi sebagai generator sepanjang kapasitor mampu mencatu daya reaktif yang diperlukan generator dan beban yang dilayani generator, fenomena ini dikenal dengan Self-Excited Induction Generator (SEIG).
Untuk Self Excited Induction Generator atau Generator Induksi Penguatan Sendiri, mesin induksi beroperasi pada daerah jenuh, oleh karena itu kapasitor harus mempunyai harga reaktansi magnetisasi XMselalu berada di daerah jenuh.
Tujuan
Penentuan nilai kapasitor eksitasi yang digunakan untuk membangkitkan tegangan nominal SEIG pada beban yang bervariasi dan penentuan nilai frekuensi dan kapasitor minimal untuk membangkitkan tegangan untuk beban yang bervariasi dan kecepatan SEIG konstan.
Metodologi
Metodologi yang digunakan adalah melakukan pengamatan pada rangkaian ekivalen motor induksi untuk mendapatkan parameter generator induksi.
Dari analisa terhadap rangkaian ekivalen generator induksi didapatkan dua persamaan dalam F dan Xc yang diturunkan dari pemisahan persamaan dalam bentuk real dan imajiner. Kedua persamaan dipecahkan dengan mencari akar persamaan dari kedua persamaan di atas. Setelah didapatkan nilai Xc, maka kemudian dilakukan perhitungan nilai kapasitor minimum. Penentuan nilai frekuensi dan kapasitor dengan menggunakan metoda impedansi loop ini bukanlah metoda yang baru, tapi dengan menggunakan metoda ini dapat ditentukan nilai frekuensi dan kapasitor pada saat reaktansi magnetisasi jenuh dan maksimum.
Motor induksi yang dipergunakan berdiri sendiri atau tidak tersambung ke jaringan sehingga nilai frekuensi yang dihasilkan merupakan nilai frekuensi keluaran dari generator. Nilai frekuensi yang dihasilkan dari perhitungan dibandingkan nilainya dengan nilai frekuensi yang dihasilkan oleh motor
induksi sebagai objek uji yang telah dirubah menjadi generator induksi.
Rangkaian Ekivalen Generator Induksi Rangkaian ekivalen motor induksi phasa tiga dapat diwakili oleh rangkaian satu phasa seperti ditunjukkan pada gambar 1.
Gambar 1. Rangkaian umum motor induksi. keterangan:
RS = resistan kumparan stator
Xls = reaktansi bocor kumparan stator XM = reaktansi magnetisasi
RM = rugi-rugi resistan Rr = resistan kumparan rotor Xlr = reaktansi bocor kumparan rotor s = slip
Jika motor induksi beroperasi sebagai generator induksi maka rangkaian ekivalen generator induksi memiliki beberapa parameter tambahan seperti yang ditunjukkan pada gambar 2.
F RL 2 F X j c F RS ls jX jXlr M jX RM v F Rr
-Gambar 2. Rangkaian Ekivalen Generator Induksi.
keterangan:
RL = resistan beban
XC = reaktansi kapasitif kapasitor F = frekuensi per unit =
s g
f
f
fg = frekuensi generator fs = frekuensi sinkron v = kecepatan rotor Model MatematisUntuk rangkaian gambar 2 di atas, persamaan loop untuk arus adalah :
Z. I = 0 Dimana Z adalah : ÷÷ ø ö çç è æ ÷ ø ö ç è æ + -+ + + ÷÷ ø ö çç è æ ÷÷ ø ö çç è æ + ÷ ø ö ç è æ -r r m s s c FL jXL R F jX jX F R jX JX v F R || || 2 2.1
Generator Induksi penguatan sendiri bekerja dalam keadaan mantap, sehingga arus loop I ≠ 0. Oleh karena itu pada persamaan 2.1, Z = 0. Pemisahan bagian real dan imajiner dari persamaan 2.1 didapatkan dua persamaan: Bagian Real: -a1F3+a2F2+(a3Xc+a4)F+a5Xc = 0 2.2 Bagian Imajiner: -b1F4+b2F3+(b3Xc+b4)F2–(b5Xc+b6)F –Xcb7=0 2.3 dimana: a1= s lr L m lr L m ls L lr ls L
X
X
R
X
X
R
X
X
X
X
R
R
+
+
+
r m L s m L r ls LX R X X R X X R X + + +a2=
vR
LX
lsX
lr+
vR
LX
lsX
m+
vR
LX
lrX
m m L s lr L LX
X
vR
X
X
vR
+
+
a3=R
rX
L+
R
rX
ls+
R
rX
m+
R
sX
lr+
R
LX
lr +R
sX
m+
R
LX
m a4=R
LR
sR
r a5=vX
lrR
L+
vX
lrR
s+
vX
mR
L+
vX
mR
s b1=X
LX
lsX
lr+
X
LX
lsX
m+
X
LX
lrX
m b2=vX
LX
lsX
lr+
vX
LX
lsX
m+
vX
LX
lrX
m b3=X
LX
lr+
X
LX
m+
X
lsX
lr m lr m lsX
X
X
X
+
+
b4=R
LX
lrR
s+
R
LR
rX
lr+
R
LR
sX
m L r s r m LX
R
R
R
X
R
+
+
b5=vX
LX
lr+
vX
LX
m+
vX
lrX
ls m lr m lsX
vX
X
vX
+
+
b6=vR
LR
sX
lr+
vR
LR
sX
m b7=R
rR
L+
R
rR
s2.3. Penentuan nilai C minimum
Dari bagian real ( persamaan 2.2) didapatkan Xc = 5 3 4 2 2 3 1
a
F
a
F
a
F
a
F
a
Dari bagian imajiner ( persamaan 2.3 ) didapatkan : Xc = 7 5 2 3 6 2 4 3 2 4 1
b
F
b
F
b
F
b
F
b
F
b
F
b
-+
Dari persamaan kedua di atas didapatkan persamaan
K4F4 – K3F3 + K2F2 – K1F – K0 = 0 Yang digunakan untuk menentukan nilai f ( frekuensi ).
Selanjutnya nilai frekuensi digunakan untuk menghitung nilai minimum kapasitor.
Listing Program dan Flowchart Listing Program % Listing Program % clear all; clc; format long Rs = 0.077; Rr = 0.030; Xls = 0.055; Xlr = Xls; v = 1; RL = 1.25; XL = 0; Xm = 1.74; fb = 50; Zb = 689.655; %
% Persamaan matematis bagian Real T=Xlr+Xm; W=(Xls+((Xls*Xm)/(Xls+Xm))); a1=(RL*T*W)+(XL*T*(Rs+Rr)); a2=v*T*((RL*W)+(Rs*XL)); a3=(Rr*(XL+T))+(T*(Rs+RL)); a4=RL*Rs*Rr; a5=v*T*(RL+Rs);
% Persamaan matematis bagian imajiner
b2=v*b1; b3=T*(XL+W); b4=(RL*T*(Rs+Rr))+(Rs*Rr*XL); b5=v*b3; b6=v*RL*Rs*T; b7=Rr*(RL+Rs); % Pembentukan Koefisien K K4=((a1*b3)-(a3*b1)); K3=-((a2*b3)+(a1*b5)-(a3*b2)… -(a5*b1)); K2=(a2*b5)+(a3*b4)-(a4*b3)… -(a1*b7)-(a5*b2); K1=-((a3*b6)+(a5*b4)-… (a4*b5)-(a2*b7)); K0=(a4*b7)+(a5*b6); % Pencarian akar F Z=[K4 K3 K2 K1 K0]; Y=roots(Z); if and (imag(Y(1))==0,imag(Y(2))==0) F1=Y(2); F2=Y(1); elseif and (imag(Y(1))==0,imag(Y(3))==0) F1=Y(3); F2=Y(1); elseif and (imag(Y(1))==0,imag(Y(4))==0) F1=Y(4); F2=Y(1); elseif and (imag(Y(2))==0,imag(Y(3))==0) F1=Y(3); F2=Y(2); elseif and (imag(Y(2))==0,imag(Y(4))==0) F1=Y(4); F2=Y(2); elseif and (imag(Y(3))==0,imag(Y(4))==0) F1=Y(4); F2=Y(3); End % Mencari Nilai C Xc1=((a1*F1^3)-(a2*F1^2)-… (a4*F1))/((a3*F1)-(a5)); Xc2=((b1*F2^4)-(b2*F2^3)… -(b4*F2^2)+(b6*F2))/((b3*F2^2)-(b5*F2)-(b7)); C1=1/(2*pi*fb*Zb*Xc1); C2=1/(2*pi*fb*Zb*Xc2); Flowchart Program
HASIL DAN PEMBAHASAN
Parameter Mesin InduksiSpesifikasi motor yang digunakan dalam uji coba ini adalah:
Jumlah phasa : 3 Tegangan Y / Δ : 690 / 400 V Arus Y / Δ : 0.58 / 1 A Daya : 0.27 kW Frekuensi : 50 Hertz Kecepatan : 1500 rpm Motor induksi dijalankan pada keadaan tanpa beban atau tanpa beban mekanis eksternal. Percobaan beban nol bertujuan untuk mencari reaktansi tanpa beban ( XNL ) yang diasumsikan sama dengan reaktansi stator (X1). Nilai reaktansi ini (XNL) berguna untuk mencari reaktansi magnetik ( XM ) serta tahanan rotor (R2).
Kemudian dilakukan uji DC untuk tahanan stator (R1) yang dilakukan dengan mengukur langsung besarnya tahanan terminal stator motor dengan menggunakan Ohmmeter.
Kemudian dilakukan percobaan rotor tertahan, percobaan ini dilakukan pada saat mesin beroperasi sebagai motor, kemudian rotor ditahan sehingga tidak berputar. Percobaan ini bertujuan untuk mencari nilai reaktansi bocor stator ( X1).
Dari uji-uji di atas didapatkan nilai
parameter mesin sebagai berikut:
R
1= 53.1 Ohm
R
2= 20.9 Ohm
X
1= 38.0 Ohm
X
C= 975.6 Ohm
C = 4.10
-6Farad
Perhitungan didasarkan pada besaran perunit (pu) dengan base sama dengan spesifikasi name plate mesin, yaitu:
Tegangan dasar = 400 V Arus dasar = 0.58 A Impedansi dasar = Idasar Vdasar = 689.6W Daya dasar =Vdasar.Idasar= 232 VA Kecepatan dasar = 1500 rpm Frekuensi dasar = 50 Hz Besar nilai parameter mesin dalam pu:
- R1= 0.077 pu - R2 = 0.030 pu - X l = 0.055 pu
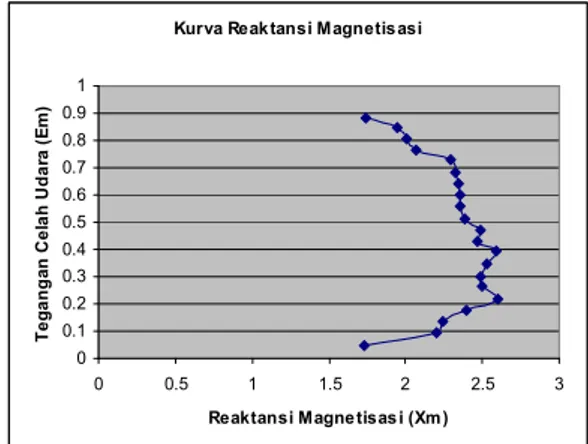
Penentuan persamaan reaktansi magnetisasi Kurva saturasi tanpa beban dari mesin ditentukan pada rating frekuensi normal 50 Hz. Kurvanya seperti pada gambar 3.
Kurva Reaktansi Magnetisasi
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0 0.5 1 1.5 2 2.5 3 Reaktansi Magnetisasi (Xm) Teg anga n Cel ah Udar a (E m)
Gambar 3. Kurva Reaktansi Magnetisasi Untuk mendapatkan reaktansi magnetisasi pada tegangan celah udara, Em, yang berubah-ubah, mesin digerakkan pada kecepatan sinkronnya dengan menggunakan motor DC dan sumber tegangan sinusoidal variabel pada f = 50 Hz. Sumber tegangan
dipasangkan pada stator mesin induksi selama rotornya digerakkan oleh motor DC pada kecepatan konstan sama dengan kecepatan sinkronnya, kemudian tegangan sumber divariasikan dan diukur arusnya. Dari pengukuran didapatkan nilai
Xm (saturasi) = 1.74 pu Xm (maksimal) = 2.61 pu Hasil Simulasi
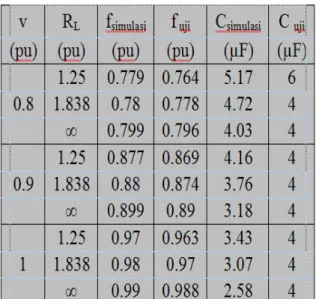
Simulasi dilakukan dengan mengambil nilai reaktansi magnetisasi (Xm) saat saturasi (jenuh) sebesar 1.74 pu dan saat maksimum sebesar 2.61 pu. Tegangan terminal dipertahankan konstan 380 volt (0.95 pu) dengan kecepatan divariasikan pada 0.8 pu, 0.9 pu dan 1 pu, dan dengan berbagai nilai variasi beban. Hasil frekuensi simulasi, frekuensi terukur dan CSimulasidapat dilihat pada tabel 1 untuk reaktansi magnetisasi saturasi dan pada tabel 2 untuk reaktansi magnetisasi maksimum.
Tabel 1. Tabel perbandingan frekuensi simulasi dengan frekuensi terukur dan C simulasi pada
Xm saturasi (jenuh)
Tabel 2. Tabel perbandingan frekuensi simulasi dengan frekuensi terukur dan C simulasi pada
Xm maksimum
Dari tabel 1 di atas terlihat persentase kesalahan antara frekuensi simulasi dan frekuensi terukur berkisar 0.2 % – 1.9 % dengan rata-rata 0.9 %, ini berarti frekuensi perkiraan hasil simulasi mendekati frekuensi yang terukur pada keluaran generator.
Dari tabel 2 di atas terlihat persentase kesalahan antara frekuensi simulasi dan frekuensi terukur berkisar 0.3 % – 2.09 % dengan rata-rata 1.2 %, ini berarti frekuensi perkiraan hasil simulasi mendekati frekuensi yang terukur pada keluaran generator.
Untuk kecepatan yang sama, frekuensi yang dihasilkan berbanding lurus dengan RL (tahanan beban), semakin besar RL maka frekuensi yang dihasilkan akan semakin besar.
Untuk RL yang sama, frekuensi yang dihasilkan berbanding lurus dengan kecepatan putar generator, semakin besar kecepatan maka frekuensi yang dihasilkan akan semakin besar.
Dari data CSimulasi, untuk kecepatan yang sama, semakin besar tahanan beban (RL), maka
semakin kecil nilai kapasitor (C) yang dibutuhkan untuk menghasilkan arus reaktif.
Untuk tahanan beban (RL) yang sama, semakin besar putaran generator, maka nilai kapasitor yang dibutuhkan akan semakin kecil.
KESIMPULAN DAN SARAN
Kesimpulan
Metoda impedansi loop ini dapat digunakan untuk menentukan nilai frekuensi dan nilai kapasitansi minimum dari generator induksi phasa tiga berpenguatan sendiri.
Hasil frekuensi melalui pengukuran dan frekuensi melalui simulasi dengan metoda ini didapatkan persentase kesalahan rata-rata sebesar 0.9 % untuk keadaan XM saturasi dan 1.2 % untuk keadaan XM maksimum.
Nilai kapasitor yang didapatkan dari hasil simulasi dengan metoda ini, untuk kecepatan generator 0.8 pu – 1 pu dengan resistansi beban antara 1.25 pu - ∞ pu maka nilainya berkisar dari 5.17 pu – 2.58 pu.
Untuk spesifikasi motor induksi dengan nilai parameter mesin seperti pada motor percobaan ini yaitu : Rstator = 5.31 Ω, Rrotor = 20.9 Ω, Xlr = Xls = 38 Ω, untuk menjaga generator induksi selalu beroperasi didaerah jenuhnya dengan nilai frekuensi 1 pu maka nilai kapasitor minimum yang dipergunakan minimal 3.43 µF
.
Self Excited Induction Generator tidak
membutuhkan tegangan AC tapi membutuhkan kapasitor sebagai sumber daya reaktif dan akan mencatu daya ke jaringan. Untuk Generator
Induksi yang terhubung ke jala-jala tidak memerlukan kapasitor karena generator akan mengambil daya reaktif dari jala-jala.
Saran
Metoda ini dapat digunakan sebagai
salah satu cara penentuan nilai kapasitas
pada generator induksi.
Perlu dilakukan percobaan mencari
kurva magnetisasi sampai pada keadaan
jenuh, agar diperoleh hasil simulasi yang
lebih akurat.
DAFTAR PUSTAKA
[1]. A.K Al Jabri dan A.I Alolah, Capacitance
Requirement for Isolated Self-Exited Induction Generator. IEE Proceedings, Vol
137,May 1990.
[2]. A.K Tandon, S.S Murthy dan G.J Berg,
Steady State Analysis of Capacitor Self Excited Induction Generator. IEE
Proceedings Vol PAS 103 No3, March 1984.
[3]. Nazir,Refdinal, Analisa Perilaku Mantap
dari Generator Induksi Penguatan Sendiri Dengan Model Yang Digeneralisasi,
Jurusan Teknik Elektro UNAND.
[4]. Chapman, Stephen J, 1991, Electricity
Machinery Fundamental 2nd Edition, Mc Graw-Hill International.
[5]. Chapra, Steven, Raymond Canale P, 1994,
Metoda Numerik, Jakarta
[6]. Theodore Wildi, 2002, Electrical Machines, Drives, and Power Systems, 5th