22
Skema Implementasi Pengendali Heater
Kandang Ayam Broiler Berbasis Node Nirkabel
Menggunakan Logika Fuzzy
Mochamad Irfal Tri Alfiansyah
1, Dede Irawan Saputra
2, Cecep Yusuf
31,2,3
Jurusan Teknik Elektro, Fakultas Teknik, Universitas Jenderal Achmad Yani Jl. Terusan Jenderal Sudirman Cimahi, Indonesia
Abstrak
Ayam merupakan salah satu hewan yang banyak diminati oleh peternak, terutama ayam jenis broiler. Salah satu faktor penyebab penyakit pada ayam yaitu suhu dan kelembaban yang tidak sesuai. Tumbuh kembang ayam perlu diperhatikan sejak ayam masih berusia dini, karena anak ayam lebih rentan terhadap penurunan suhu dan tingkat kelembaban yang tinggi. Solusi yang dapat diterapkan untuk mengatasi permasalahan tersebut adalah pemanfaatan teknologi. Kemajuan teknologi yang sangat berkembang dapat dimanfaatkan dalam bidang peternakan. Pada penelitian dikembangkan sebuah sistem pengendali suhu dan kelembaban menggunakan mikrokontroler NodeMCU dan sensor BME280. Metode pengendali menggunakan algoritma fuzzy tipe Sugeno. Output sistem kendali berupa heater pada kandang ayam broiler kelas starter yang berfungsi berdasarkan PWM agar kondisi suhu dan kelembaban sesuai. Seluruh sistem akan terhubung secara nirkabel yang meliputi node sensor dan node aktuator dengan koneksi localhost. Penerapan web server ditambahkan untuk menampung seluruh data sensor dan heater dengan dilengkapi halaman user
interface demi memudahkan peternak dalam memantau kondisi kandang. Hasil penelitian menunjukkan bahwa
perancangan sistem kendali dan pemantauan suhu dan kelembaban kandang ayam dapat bekerja dengan baik secara otomatis. Pengujian pada node sensor menghasilkan tingkat akurasi suhu sebesar 97% dan kelembaban 96%. Koneksi antar node dan web server dapat terhubung secara localhost dengan metode post dan parsing data. Algoritma fuzzy yang diimplementasikan pada node sensor menghasilkan nilai output yang sama dengan simulasi.
Kata kunci:logika fuzzy, node nirkabel, suhu, kelembaban, web server
I. P
ENDAHULUANAyam broiler merupakan ayam dari hasil budidaya teknologi peternakan yang memiliki ciri khas pertumbuhan yang lebih cepat, sebagai penghasil daging yang siap dipotong pada umur
28-45 hari. Suhu kandang tentunya sangat
memengaruhi produktivitas perkembangan ayam
periode starter, suhu yang baik untuk
perkembangannya yaitu 32˚C [1]. Rasio konsumsi air minum ayam menjadi lebih baik jika suhu berada pada rentang suhu 31˚C-33˚C. Penurunan suhu yang drastis menyebabkan peradangan pada saluran pernafasan yang akan meningkatkan potensi penyakit pernafasan. Salah satu solusi yang dapat diterapkan yaitu dengan pemasangan pemanas ruangan [2].
Dalam rangka menjawab tantangan tersebut, peternak ayam harus memilih metode yang tepat
untuk pemeliharaan ayam. Metode tersebut antara lain dapat dilakukan dengan pemanfaatan teknologi. Salah satunya adalah teknologi kontrol dan monitoring dapat diaplikasikan pada bidang peternakan. Internet of Think (IoT) merupakan salah
satu pengembangan teknologi yang dapat
dimanfaatkan pengguna untuk mengontrol dan memonitoring plant secara jarak jauh [3]-[4]. Namun untuk penerapan pada bidang peternakan yang sudah dilakukan masih sebatas pemantauan atau monitoring saja, sehingga peternak masih harus mengontrol kandang ke lokasi plant [5].
Berdasarkan permasalahan tersebut,
implementasi salah satu solusi yaitu menerapkan algoritma pengendali secara nirkabel [6]-[7]. Pengendali terdiri atas beberapa node [8]. Sensor dan aktuator dibagi menjadi node sensor dan node actuator. Adapun algoritma pengendali yang dapat digunakan salah satunya adalah logika fuzzy
[9]-23
[10]. Logika fuzzy sebagai algoritma pengendali berdasarkan variabel suhu dan kelembaban pada kandang ayam broiler yang diimplementasikan pada node sensor. Pengendalian dilakukan untuk ayam broiler kelas starter.
Pada penelitian dibangun sebuah web server sebagai media penyimpanan data berbasis localhost. Variabel suhu dan kelembaban beserta hasil output pengendalian akan ditransmisikan ke web server. Data yang telah diterima server kemudian disimpan kedalam sebuah database. Data yang tersimpan akan dikirim ke node aktuator dalam bentuk nilai
Pulse Wide Modulation (PWM) yang
diimplementasikan sebagai penyalaan dari aktuator berupa heater. Sistem didukung dengan sebuah user interface sebagai media monitoring plant. Penelitian ini diharapkan dapat membantu peternak dalam mengamati dan mengendalikan kondisi kandang secara otomatis guna mencegah strees pada ayam
kelas starter akibat penurunan suhu lingkungan sekitar.
II. M
ETODEP
NELITIANPada Gambar 1 menjelaskan proses sistem untuk menghasilkan output dari beberapa proses deteksi suhu dan kelembaban untuk menentukan nyala heater pada kandang ayam broiler. Bagian pertama yaitu Node Sensor dengan tipe sensor BME280 dan bagian kedua yaitu node actuator yang terdiri dari heater dan driver L298N. Kedua node tersebut menggunakan mikrokontroler yang sama yaitu papan NodeMCU dengan mikrokontroler ESP8266. Kedua node akan terhubung secara nirkabel dengan komunikasi jaringan wifi.
Mikrokontroler NodeMCU Web Server
Mikrokontroler NodeMCU Sensor suhu dan
kelembaban Driver motor L298N
Media Transmisi menggunakan jaringan wifi dan Protocol TCP/IP.
Metode kendali logika fuzzy metode Sugeno
User Interface menggunakan PHP dan HTML
Kondisi kandang
ayam
Heater
Gambar 1. Diagram blok sistem
A. Perancangan Node Sensor
Pada tahap awal sistem node sensor terdapat komponen sensor yang akan mendeteksi keadaan suhu dan kelembaban kandang ayam broiler. Sensor yang digunakan yaitu BME280. Pin akan masuk ke pin digital node sensor. Data masukan sensor berupa nilai digital, nilai sensor kemudian dikalibrasi agar mendapatkan nilai suhu dan kelembaban yang sebenarnya. Pada proses ini variabel I/O, konstanta, var dan port sudah dideklasrasi di awal program untuk mempermudah proses perhitungan.
BME280 memiliki pengukuran suhu dengan range -40˚C–85 ˚C dan kelembaban 0%-100%. Dalam modul sensor terdapat fitur I2C interface, sehingga dapat memudahkan dalam memprogram dan kalibrasi sensor. Alamat default yang digunakan pada I2C dalam modul yaitu 0x76. Adapula alamat yang menggunakan 0x77, namun untuk penggunaan alamat tersebut modul harus dimodifikasi pada I2C jumper selector. Pin yang terdapat pada modul sensor ada empat yaitu VIN, GND, SCL dan SDA yang dihubungkan ke pin
yang terdapat pada papan mikrokontroler
NodeMCU seperti pada Tabel 1.
Tabel 1. Konfigurasi pin sensor dengan NodeMCU NodeMCU BME280
3V3 VIN
GND GND
D1 SCL
D2 SDA
Pada Gambar 2 merupakan flowchart node sensor dan Gambar 3 merupakan diagram skematik pada node sensor yang menampilkan konfigurasi
antara NodeMCU dengan sensor BME280.
Kemudian data sensor akan diolah menggunakan logika fuzzy tipe sugeno, dari proses logika fuzzy akan didapat hasil nilai kondisi heater. Kemudian data akan ditransmisi menggunakan metode POST, data yang dikirim merupakan data variabel dari Node sensor. Node Sensor akan memasukan variabel suhu, kelembaban dan nilai PWM heater untuk dikirim. Web server menerima data nilai yang selanjutnya data disimpan ke database.
24
Nilai sensor Suhu 0°c-60°C Kelembaban 0%-100% Pengiriman data menggunakan metode POST Logika fuzzy metode sugenoSuhu dan kelembaban sesuai dengan set point
Ya
Tidak Inisialisai sensor,
var dan port
Selesai Mulai
Sensor suhu dan kelembaban dengan I2C Web server menerima data Simpan ke database
Gambar 2. Flowchart node sensor
Gambar 3. Skematik node sensor
B. Perancangan Node Aktuator
Node aktuator dibangun untuk mengintegrasikan
heater
dengan sistem. Heater akan aktif secara digital dengan masukan PWM. Node aktuator akan mendapatkan nilai output dengan parsing data darinode sensor. Pada bagian node aktuator terdapat
komponen motor driver L298N untuk
menghubungkan heater yang memiliki tegangan sebesar 12V dengan nilai PWM dari node aktuator.
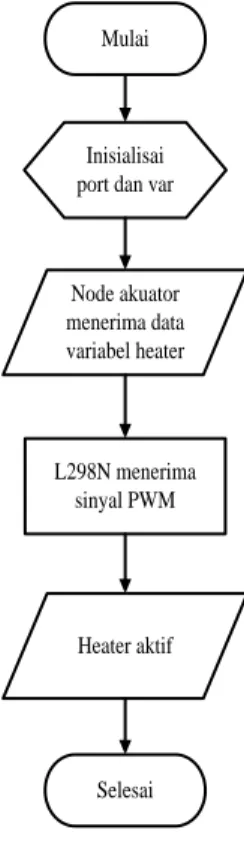
L298N menerima sinyal PWM Selesai Mulai Node akuator menerima data variabel heater Heater aktif Inisialisai port dan var
Gambar 4. Flowchart node aktuator
Gambar 4 merupakan flowchart node aktuator. Node sensor akan mengrimkan data variabel heater ke node aktuator menggunakan komunikasi serial. Node aktuator dikonfigurasi dengan target Internet Protocol (IP) yang dapat dilihat di serial monitor. Setelah node aktuator menerima data kondisi heater maka data akan dikonversi menjadi tipe data integer, karena data yang hasil komunikasi merupakan tipe data string. Data akan diolah diolah menjadi nilai PWM dengan rentang 0-255. Hasil PWM yang diolah akan diteruskan ke driver motor untuk menentukan penyalaan heater. Motor driver akan mengirim referensi tegangan sesuai dengan PWM dan akan diteruskan ke heater. Heater yang digunakan adalah lampu pijar dengan input tegangan 12V. Konfigurasi hubungan pin serta skematik pada node aktuator dapat dilihat pada Tabel 2 dan Gambar 5.
Tabel 3. Konfigurasi pin driver dengan NodeMCU NodeMCU Driver L298N
GND GND
D1 In3
25
Gambar 5. Skematik node aktuatorC. Perancangan Algoritma Logika Fuzzy
Sistem kendali heater berupa sistem loop terbuka dengan algoritma fuzzy tipe sugeno. Dalam penerapannya metode ini dibagi menjadi tiga proses utama yaitu fuzzifikasi, inferensi fuzzy dan defuzzifikasi.
Pada Gambar 6 dapat dilihat skema pengolahan
data sensor suhu dan sensor kelembaban
menggunakan logika fuzzy tipe Sugeno. Tahap pada logika fuzzy diawali dengan proses fuzzifikasi. Proses fuzzifikasi yaitu variabel input akan diubah menjadi nilai samar (kabur) dan penentuan nilai domain sehingga dapat dikelompokan menjadi himpunan fuzzy serta didefinisikan dengan variabel linguistik.
Linguistik yang terdapat pada variabel suhu dibagi menjadi lima himpunan fuzzy yaitu dingin, sejuk, normal, hangat dan panas. Sedangkan pada variabel kelembaban dibagi menjadi lima himpunan fuzzy sangat kering, kering, lembab, basah dan sangat basah. Serta variabel heater meliputi lima himpunan fuzzy sangat kecil, kecil, sedang, tinggi,
sangat tinggi. Setelah data variabel input
dikelompokan, maka setiap himpunan fuzzy dapat ditentukan nilai domainnya seperti pada Tabel 4.
Mulai Input Himpunan Fuzzy Menentukan Derajat Keanggotaan Menghitung Predikat Aturan Defuzzyfikasi dengan metode Weight Average Output Hasil Keputusan selesai
Gambar 5. Flowchart algoritma logika fuzzy Tabel 4. Konfigurasi variabel, himpunan dan domain
fuzzy
Nama Variabel Himpunan Fuzzy Domain
Input suhu [0-60] ˚C dingin [0-10] sejuk [5-25] normal [20-40] hangat [35-55] panas [50-60] kelembaban [0-100]% sangat kering [0-20] kering [10-50] lembab [30-70] basah [50-90] sangat basah [80-100] Output heater [0-100]% sangat kecil [20] kecil [40] sedang [60] tinggi [80] sangat tinggi [100]
26
Tahap selanjutnya yaitu inferensi fuzzy. Proses Inferensi fuzzy merupakan proses pengambilan data nilai input yang telah di fuzzifikasi sebelumnya dan di terapkan pada aturan-aturan (rules) yang dibentuk dengan teknik IF-THEN Rules. Banyaknya kondisi output ditentukan dari proses rule
evaluation. Pada kondisi fuzzifikasi terdapat lima kondisi variabel suhu dan lima variabel kelembaban, maka dapat ditentukan bahwa basis aturan yang harus dibuat sebanyak 25 rules. Hasil dari rules yang dibuat dapat dilihat pada Tabel 4.
Tabel 4. Basis aturan logika fuzzy In1
In2 Sangat kering Kering Lembab Basah Sangat basah dingin sedang tinggi tinggi sangat tinggi sangat tinggi
sejuk sedang sedang tinggi tinggi sangat tinggi
normal kecil kecil sedang tinggi tinggi
hangat sangat kecil sangat kecil kecil sedang tinggi panas sangat kecil sangat kecil kecil sedang tinggi
Dalam inferensi fuzzy terdapat dua hal penting untuk menentukan keputusan kondisi output yaitu
proses conjungtion dan disjungtion. Proses
conjungtion adalah tahapan mengambil nilai derajat keanggotaan yang paling kecil (MIN) untuk setiap basis aturan, sedangkan disjungtion merupakan pengambilan nilai derajat keanggotaan dari setiap kondisi output dengan nilai yang paling besar (MAX).
Proses akhir dalam logika fuzzy yaitu
defuzzifikasi. Proses defuzzifikasi terbagi kedalam beberapa metode, pada penelitian digunakan logika fuzzy tipe Sugeno dengan metode Weighted Average, atau dengan kata lain cara mengambil nilai rata-rata domain yang memiliki nilai keanggotaan maksimum. Metode ini menghitung nilai derajat keanggotaan output dikali dengan nilai crisp yang ada pada membership function output, hasil yang didapat akan dibagi dengan akumulasi nilai derjat keanggotaan sesuai dengan jumlah kondisi yang
didapat. Hasil yang diperoleh dari proses
defuzzifikasi akan menjadi nilai akhir dari proses logika fuzzy.
D. Perancangan Web Server
Web server dibangun menggunakakan aplikasi
XAMPP
. Dalam panel kontrol XAMPP program yang diaktifkan hanya Mysql database dan apache. Database akan menyimpan seluruh informasi sistem aplikasi web yang berkomunikasi secara localhost, file yang digunakan seperti PHP dan HTML disimpan dalam folder htdoc. Program PHP digunakan untuk mengolah data sensor dan heater,sedangkan untuk HTML digunakan untuk
menampilkan halaman user interface.
Selain program PHP dan HTML, program Mysql juga digunakan dalam server yang berfungsi membangun database. Data yang disimpan dalam database berupa nilai besaran suhu, kelembaban dan heater dari node sensor. Nama yang dirangcang untuk database adalah monitoring dan tabel bernama sensor.
III.
HASIL DAN PEMBAHASANA. Hasil Pengujian Node Sensor
Berikut merupakan hasil perancangan, semua komponen yang digunakan seperti NodeMCU, sensor BME 280, motor driver L298N, heater, baterai dan kabel penghubung dipasang dalam sebuah simulator kandang ayam broiler berukuran 32 x 31 x 26 seperti pada Gambar 6.
Gambar 6. Realisasi simulator
Pengujian
sensor BME280 dilakukan dengan mengambil data suhu dan kelembaban. Nilai data yang didapat dari sensor perlu divalidasi dengan27
menggunakan Thermo Hygro. Dengan demikian
sensor perlu dilakukan pengujian dengan
menggunakan alat lain seperti Thermo Hygro untuk mendapatkan hasil yang sesuai dan tingkat kesalahan yang terjadi pada sensor BME280.
Pada Gambar 7 merupakan hasil pembacaan suhu pada sensor BME280 yang diuji dengan perbandingan Thermo Hygro. Dapat diamati bahwa hasil pembacaan sensor sudah sangat mendekati kondisi suhu sekitar yang sebenarnya dengan tingkat akurasi 97% dan tingkat kesalahan sebesar 3% atau ± 1˚C.
Gambar 7. Grafik perbandingan pengujian suhu
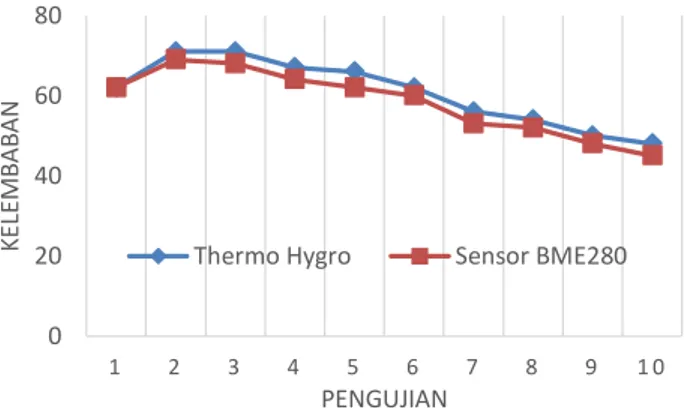
Pada Gambar 8 merupakan grafik hasil pengujian pembacaan kelembaban pada sensor BME280 yang diuji dengan perbandingan Thermo Hygro. Dapat diamati bahwa hasil pembacaan sensor sudah sangat mendekati kondisi kelembaban sekitar yang sebenarnya dengan tingkat akurasi 96% dan nilai kesalahan sebesar 4%.
Gambar 8. Grafik perbandingan pengujian kelembaban
B. Hasil Pengujian Node Aktuator
Hasil pengujian yang dilakukan pada node aktuator untuk mengetahui koneksi antara node aktuator node sensor. Node aktuator akan menerima data heater dengan teknik parsing data. Node aktuator harus terhubung dengan jaringan wifi yang sama dengan node sensor.
Dalam proses pengiriman data dari node sensor, data kondisi heater akan dibuat dalam tipe data string. Sehingga saat node aktuator menerima data heater, data tersebut harus di konversi menjadi tipe data integer agar nilai data dapat diproses ke tahap selanjutnya. Kemudian nilai kondisi heater yang telah dikonversi akan dibuat menjadi beberapa algoritma sebagai perintah penyalaan heater dalam bentuk PWM.
Dapat dilihat pada Tabel 5 pengujian antara hasil PWM dengan tegangan keluaran yang dihasilkan driver motor pada node aktuator. Pengujian untuk mendapatkan kondisi heater yang ingin didapatkan menggunakan potensio, karena untuk pengujian menggunakan sensor akan cukup sulit dilakukan mengingat bahwa masukan sensor tergantung pada suhu dan kelembaban yang ada disekitar.
Tabel 5. Pengujian PWM Peng ujian Tegangan Input Kondisi Heater PWM Teganga n Heater 1 11.46 20 51 2.28 2 11.46 40 102 4.38 3 11.46 60 153 5.78 4 11.46 80 204 8.07 5 11.46 100 255 10.46
C. Pengujian Logika Fuzzy
Pengujian algoritma fuzzy akan divalidasi dengan simulasi di MATLAB. Simulasi akan dilakukan menggunakan fuzzy logic toolbox untuk mengetahui besaran output yang didapat dari kondisi suhu dan kelembaban. Hasil yang didapat pada perancangan akan menjadi data pembanding dengan hasil simulasi.
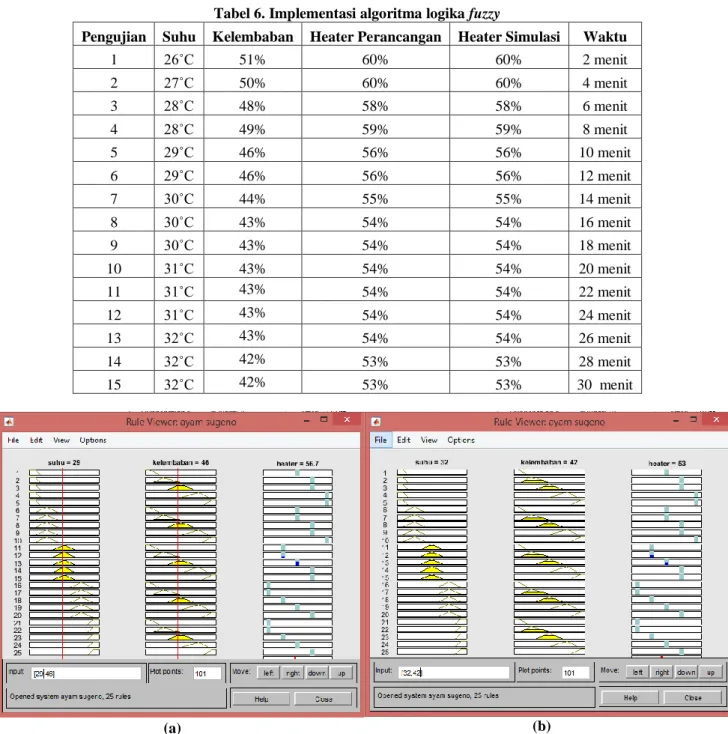
Hasil pengujian yang dapat dilihat pada Tabel 6 merupakan data yang diambil dari simulator yang diaktifkan selama 30 menit, sehingga pengambilan data dalam satu kondisi yaitu selama 2 menit. Pengamatan pada hasil output simulator dengan simulasi disimpulkan bahwa sistem yang telah diterapkan pada perancangan sudah sesuai dengan yang diharapkan.
Berdasarkan pengujian yang dilakukan pada simulator, waktu yang diperlukan sistem unuk mencapai suhu 32˚C adalah 26 menit. Perbandingan hasil pengujian simulator dengan fuzzy logic toolbox
0 5 10 15 20 25 30 35 1 2 3 4 5 6 7 8 9 1 0 SUHU PENGUJIAN
Thermo Hygro Sensor BME280
0 20 40 60 80 1 2 3 4 5 6 7 8 9 1 0 K EL EM B AB AN PENGUJIAN
28
dapat dilihat pada Gambar 9 dan Gambar 10 dengan pengujian data ke 5 dan 10.
Gambar 9.a merupakan pengujian simulasi fuzzy logic Tollbox pada MATLAB yang terdapat input suhu 29˚C dan kelembaban 46%. Hasil kondisi
heater yang dihasilkan adalah 53%. Sedangkan pada Gambar 9.b merupakan pengujian simulasi dengan suhu 32˚C dan kelembaban 42% yang menghasilkan kondisi heater 53%.
Tabel 6. Implementasi algoritma logika fuzzy
Pengujian Suhu Kelembaban Heater Perancangan Heater Simulasi Waktu
1 26˚C 51% 60% 60% 2 menit 2 27˚C 50% 60% 60% 4 menit 3 28˚C 48% 58% 58% 6 menit 4 28˚C 49% 59% 59% 8 menit 5 29˚C 46% 56% 56% 10 menit 6 29˚C 46% 56% 56% 12 menit 7 30˚C 44% 55% 55% 14 menit 8 30˚C 43% 54% 54% 16 menit 9 30˚C 43% 54% 54% 18 menit 10 31˚C 43% 54% 54% 20 menit 11 31˚C 43% 54% 54% 22 menit 12 31˚C 43% 54% 54% 24 menit 13 32˚C 43% 54% 54% 26 menit 14 32˚C 42% 53% 53% 28 menit 15 32˚C 42% 53% 53% 30 menit (a) (b)
Gambar 9. (a) Simulasi pada pengujian ke-5; (b) Simulasi pada pengujian ke-10
D. Hasil pengujian Web Server
Tampilan awal user interface seperti Gambar 10 merupakan hasil pengujian dari program awal.html. Halaman yang dibangun untuk tampilan user interface menggunakan bahasa program HTML. Menu yang dimuat dalam halaman awal user interface adalah “cari”, menu tersebut diakses
menggunakan PC dengan cara membuka alamat website “http://localhost/tampilan/awal.html/” atau dengan cara membuka icon yang tersedia pada desktop PC. Icon website yang dibuat bertujuan untuk memudahkan user dalam mengakses tampilan web. Kemudian menu “cari” merupakan akses untuk melanjutkan halaman dari tampilan awal ke
29
halaman pengamatan. Tampilan yang disajikan berupa tabulasi pengamatan kondisi suhu dan kelembaban beserta heater. Data yang sudah tersimpan dapat diakses oleh pengguna sebagai informasi analisis kondisi kandang.
Gambar 10. Tampilan web server
IV. K
ESIMPULANHasil perancangan node nirkabel untuk
mengendalian suhu dan kelembaban telah dilakukan dengan mengimplementasikan node sensor dan node aktuator dengan tingkat akurasi suhu sebesar 97% dan kelembaban 96%.
Hasil perancangan algoritma fuzzy pada sistem menggunakan tipe Sugeno untuk mengendalikan heater yang diimplementasikan pada node sensor menghasilkan output yang sama dengan simulasi.
Hasil perancangan web server sebagai media monitoring menggunakan koneksi localhost dengan
bahasa program HTML dan PHP serta
mengimplementasikan database server untuk
menyimpan hasil data sensor dan aktuator. Tampilan database pada halaman user interface dapat ditingkatkan lagi dengan menggunakan grafik
R
EFERENSI[1] R. P. Wijayanti, W. Busono, and R. Indrati, “Effect of House Temperature on Performance of Broiler in Strarter,” pp. 1–6.
[2] R. K. Sebayang, O. Zebua, and N. Soedjarwanto, “Perancangan Sistem Pengaturan Suhu Kandang Ayam Berbasis Mikrokontroler,” JITET, no. 1, pp. 1–9, 2016.
[3] A. Najmurrokhman, N. Arafah, U. Komarudin, and B. H. S. R. Wibowo, “Prototipe Sistem Kendali Suhu dan Kelembaban dalam Ruang Budidaya Jamur Tiram menggunakan Mikrokontroler Arduino Uno dan Sensor DHT11,” in SENTER 2018, 2018, pp. 27–34. [4] D. I. Saputra, I. M. Fajrin, and Y. B. Zainal,
“Perancangan Sistem Pemantau dan Pengendali Alat Rumah Tangga Menggunakan NodeMCU,”
J. Tek. Rekayasa, vol. 4, no. 1, pp. 9–16, 2019.
[5] A. B. Tandiono, M. Rusli, and M. A. Muslim, “Pengendalian Suhu dan Kelembaban pada Budidaya Jamur Tiram dengan Menggunakan Metode Kontrol Logika Fuzzy,” EECCIS, vol. 10, no. 1, pp. 16–19, 2016.
[6] O. Banimelhem, M. Naserllah, and A. Abu-hantash, “An Efficient Coverage in Wireless Sensor Networks Using Fuzzy Logic-Based Control for the Mobile Node Movement,” Adv.
Wirel. Opt. Commun., pp. 239–244, 2017.
[7] O. N. Samijayani and I. Fauzi, “Perancangan Smart Home Berbasis Jaringan Sensor Nirkabel,”
Al-Azhar Indones. Seri Sains dan Teknol., vol. 3,
no. 2, pp. 76–81, 2015.
[8] A. R. Al Tahtawi, E. Andika, and W. N. Harjanto, “Desain Awal Pengembangan Sistem Kontrol Irigasi Otomatis Berbasis Node Nirkabel dan Internet-of-Things,” JOKI, vol. 10, no. 2, pp. 121–132, 2018.
[9] D. I. Saputra, A. S. Muharrom, I. Taufiqurrahman, R. Fauziah, and A. Junaidi, “Simulasi Kendali Logika Fuzzy Di Ruang Merokok Menggunakan Mikrokontroler,” in
Seminar Nasional Microwave, Antena dan Propagasi (SMAP 2017), 2017, no. 1, pp. 80–82.
[10] D. I. Saputra, A. Najmurrokhman, and Z. Fakhri, “Skema Implementasi Fuzzy Inference System tipe Sugeno Sebagai Algoritma Pengendali Pada Sistem Pengamatan Berbasis IoT,” in Seminar
Nasional Sains dan Teknologi 2019, 2019, pp. 1–