19
BAB III
PERANCANGAN SISTEM LANGKAH PERCOBAAN DAN HASIL PERCOBAAN
Bab ini akan membahas mengenai perancangan sistem dan realisasi perangkat keras dan perangkat lunak dari setiap modul yang mendukung keseluruhan sistem yang dibuat. Gambar 3.1. menunjukkan blok diagram sistem secara keseluruhan.
3.1 Blok Diagram Alat Keseluruhan
Gambar 3.1 blok diagram alat keseluruhan
Pada alat ini terdiri dari 2 modul yaitu modul alat dan modul pengujian.Dimana modul alat terdiri dari motor brushless cd-rom, penampil kecepatan berupa tachometer, mikrokontroler sebagai pengendali, pembangkit PWM, dan kontrol alat. Modul pengujian terdiri dari umpan balik keluaran sensor yang dikondisikan pada 3 bit LED status sensor, 6 buah LED yang menyatakan kondisi urutan komutasi 6 langkah sebagai status aktif mosfet dalam pensaklaran elektronik, terminal umpan balik sebagai jumper pengukuran tegangan dan arus pada motor.
3.2. Konfigurasi Motor Brushless
Pada Perancangan ini digunakan motor brushless cd-rom dengan tipe outruner dengan kata lain rotor(permanen magnet berada diluar stator). Motor sinkron ini merupakan motor brushless dc 3 fasa terhubung Y dan disebut juga motor tunggal terhubung Y. Menurut sumber motor yang digunakan pada pembuatan alat ini memiliki data karateristik 12 volt
20
sumber dc dan arus 250mA, sehingga motor berdaya 3 watt atau sekitar (1/250)HP dengan impedansi lilitan 1Ω per fase.
Adapun konstruksi motor brushless ini didasari pengamatan yang telah dilakukan dengan referensi yang ada, sehingga dapat disimpulkan bahwa motor ini merupakan motor brushless dc tiga fase terhubung Y dengan 3 buah sensor hall effect tipe SMD.
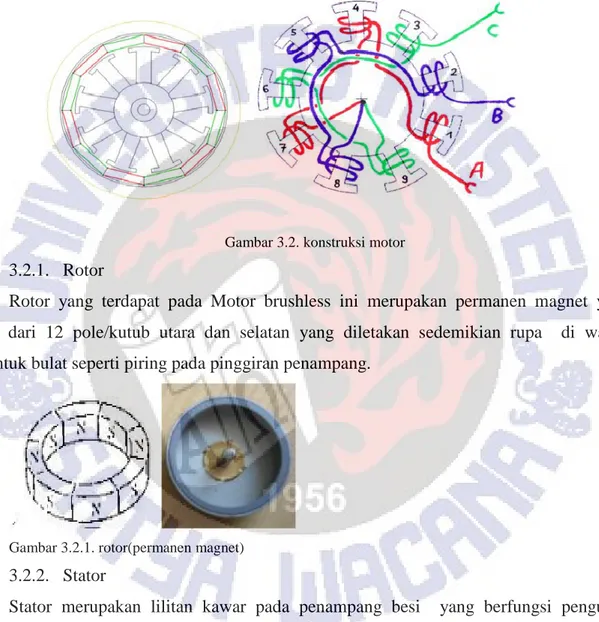
Gambar 3.2. konstruksi motor 3.2.1. Rotor
Rotor yang terdapat pada Motor brushless ini merupakan permanen magnet yang terdiri dari 12 pole/kutub utara dan selatan yang diletakan sedemikian rupa di wadah berbentuk bulat seperti piring pada pinggiran penampang.
Gambar 3.2.1. rotor(permanen magnet) 3.2.2. Stator
Stator merupakan lilitan kawar pada penampang besi yang berfungsi pengubah polaritas pada ujung besi dimana saat dialiri arus akan menimbulkan kutub medan magnet yang berbeda bergantung arah arusnya, untuk lebih jelasnya dapat dilihat dari konstruksi lilitan kawat sebagai berikut. Dimana jumlah dari kumparan perfase diwakili masing-masing tiga kumparan dengan total kumparan berjumlah Sembilan.
21
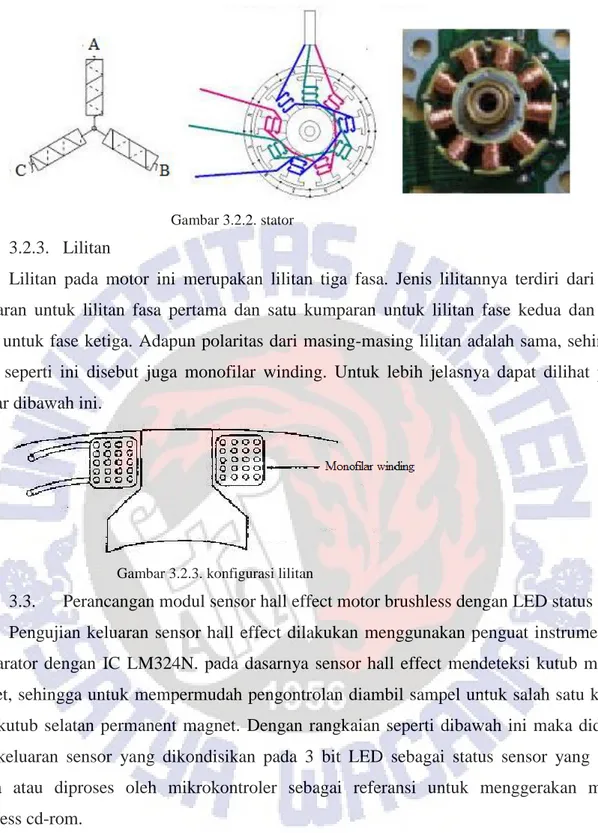
Gambar 3.2.2. stator 3.2.3. Lilitan
Lilitan pada motor ini merupakan lilitan tiga fasa. Jenis lilitannya terdiri dari satu kumparan untuk lilitan fasa pertama dan satu kumparan untuk lilitan fase kedua dan satu lilitan untuk fase ketiga. Adapun polaritas dari masing-masing lilitan adalah sama, sehingga lilitan seperti ini disebut juga monofilar winding. Untuk lebih jelasnya dapat dilihat pada gambar dibawah ini.
Gambar 3.2.3. konfigurasi lilitan
3.3. Perancangan modul sensor hall effect motor brushless dengan LED status Pengujian keluaran sensor hall effect dilakukan menggunakan penguat instrumentasi komparator dengan IC LM324N. pada dasarnya sensor hall effect mendeteksi kutub medan magnet, sehingga untuk mempermudah pengontrolan diambil sampel untuk salah satu kutub yaitu kutub selatan permanent magnet. Dengan rangkaian seperti dibawah ini maka didapat hasil keluaran sensor yang dikondisikan pada 3 bit LED sebagai status sensor yang akan dibaca atau diproses oleh mikrokontroler sebagai referansi untuk menggerakan motor brushless cd-rom.
22
Gambar 3.3. modul sensor hall effect dengan LED status 3.4. Perancangan modul driver motor brushless dengan LED status
Pada perancangan ini menggunakan teknik pensaklaran elektronik dengan konponen elektronika daya berupa mosfet. Untuk idealnya menggunakan mosfet tipe N, dikarenakan kesulitan mendapatkan tipe mosfet yang sesuai dipasaran sehingga menggunakan mosfet tipe P untuk mengganti driver atas(high). Perancangan driver motor brushless menggunakan aktif high sebagai indikator mosfet aktif. Berikut rangkainnya dibawah ini untuk modul driver mosfet
Gambar 3.4. modul driver
Perancangan untuk pensaklaran elektronik dikondisikan status Led PWM dimana led1(AH), led3(BH), led5(CH) mewakili mosfet atas aktif(mosfet p-chanel IRF9540) yang menunjukan arah arus positif dan led2(AL), led4(BL), led6(CL) mewakili mosfet bawah aktif(mosfet n-chanel IRF540). led1 dan led2 menunjukan fase A, led3 dan led4 menujukan fase B, led5 dan led6 menujukan fase C.
Pensaklaran elektronik menggunakan mosfet p(mosfet p-chanel) dan tipe-n(mosfet n-chanel), dengan status mosfet tipe P ON(short) saat mendapatkan input logic 0
C B A 11 10 9 8 7 6 5 4 3 2 1 B+ C-C+ B-A+ A-IN sensor 1K 1K LED C LED B LED A 1K + LM324/NS + LM324/NS + LM324/NS 200 Vcc 5V gnd input sensor 200 B C A CLCH BL BH AH AL J3 1k 1k1k 1k1k 1k 6 5 4 3 2 1 + V+12 12V + C1 470uF/16 V J4 q15 q13 q11 Q6 IRF540 Q2 IRF540 Q4 IRF540 Q3 IRF9540 IRF9540Q5 Q1 IRF9540 R9 150 R8 150 R7 150 R6 430 R5 430 R4 430 R3 470 R2 470 R1 470
23
(low) dan status mosfet tipe N on(short) saat mendapatkan input logic 1(high). Untuk mendapatkan status aktif high pada tipe p digunakan transistor switching. Untuk mengaktifkan mosfet tipe P menjadi ON. Karateristik mosfet dengan arus yang mengalir dari drain ke source memiliki hambatan yang disebut Rds on. Hal ini sangat berpengaruh pada saat arus mengalir pada piranti mosfet. Rds on adalah hambatan dalam mosfet saat arus mengalir pada saat mosfet aktif(ON) sehingga terjadi desipasi daya yang mengakibatkan panas pada mosfet. Hal tersebut mempengaruhi kecepatan switching(pensaklaran), Ion(arus yang mengalir saat mosfet aktif), Ton(waktu aktif/ mosdfet short), Toff(waktu tidak aktif/mosfet open), Pon(desipasi daya), Psw(daya waktu pensaklaran), hubungannya:
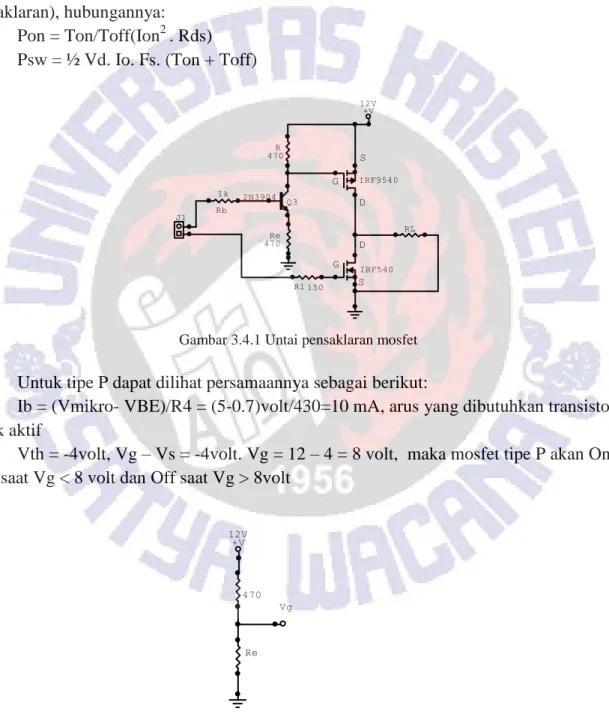
Pon = Ton/Toff(Ion2 . Rds) Psw = ½ Vd. Io. Fs. (Ton + Toff)
Gambar 3.4.1 Untai pensaklaran mosfet Untuk tipe P dapat dilihat persamaannya sebagai berikut:
Ib = (Vmikro- VBE)/R4 = (5-0.7)volt/430=10 mA, arus yang dibutuhkan transistor untuk aktif
Vth = -4volt, Vg – Vs = -4volt. Vg = 12 – 4 = 8 volt, maka mosfet tipe P akan On/ aktif saat Vg < 8 volt dan Off saat Vg > 8volt
Gambar 3.4.2. untai setara pensaklaran mosfet
S D G S D G RL +V 12V J1 Rb 1k Re 470 Q3 2N3904 R 470 R1 150 IRF540 IRF9540 Vg +V 12V Re 470
24
Vg = Re/(Re+470)*12volt, sehingga dapat ditentukan nilai Re. nilai Rg dan Re akan berpengaruh pada waktu Ton dan Toff, dikarenakan di dalam mosfet terdapat kapasitor sehingga Rg akan berpengaruh pada waktu pengisian kapasitor dalam mosfet dan Re berpengaruh pada waktu pengosongan kapasitor, semakin kecil hambatan semakin cepat waktu yang diperlukan dalam pengisian dan pengosongan kapasitor. Untuk mosfet tipe N akan aktif saat Vg > Vth dan tidak aktif saat Vg < Vth.
3.5. Perancangan modul kontrol pada mikrokontroler arduino
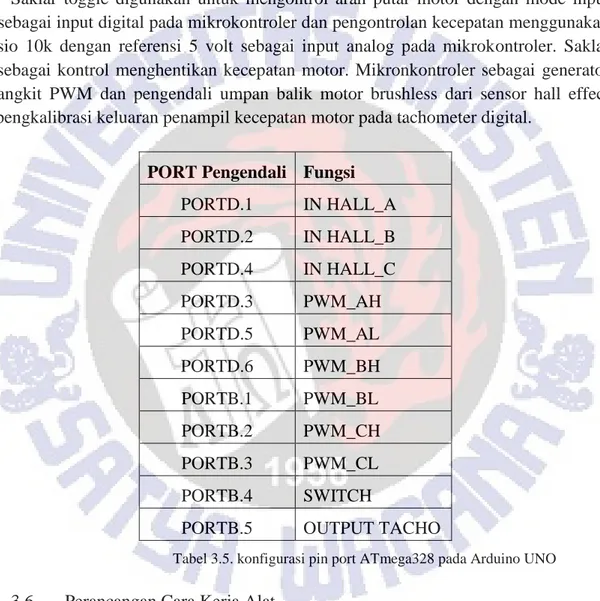
Saklar toggle digunakan untuk mengontrol arah putar motor dengan mode input logic sebagai input digital pada mikrokontroler dan pengontrolan kecepatan menggunakan potensio 10k dengan referensi 5 volt sebagai input analog pada mikrokontroler. Saklar daya sebagai kontrol menghentikan kecepatan motor. Mikronkontroler sebagai generator pembangkit PWM dan pengendali umpan balik motor brushless dari sensor hall effect serta pengkalibrasi keluaran penampil kecepatan motor pada tachometer digital.
PORT Pengendali Mikrokontroler Fungsi PORTD.1 IN HALL_A PORTD.2 IN HALL_B PORTD.4 IN HALL_C PORTD.3 PWM_AH PORTD.5 PWM_AL PORTD.6 PWM_BH PORTB.1 PWM_BL PORTB.2 PWM_CH PORTB.3 PWM_CL PORTB.4 SWITCH
PORTB.5 OUTPUT TACHO
Tabel 3.5. konfigurasi pin port ATmega328 pada Arduino UNO 3.6. Perancangan Cara Kerja Alat
3.6.1. Diagram alir program
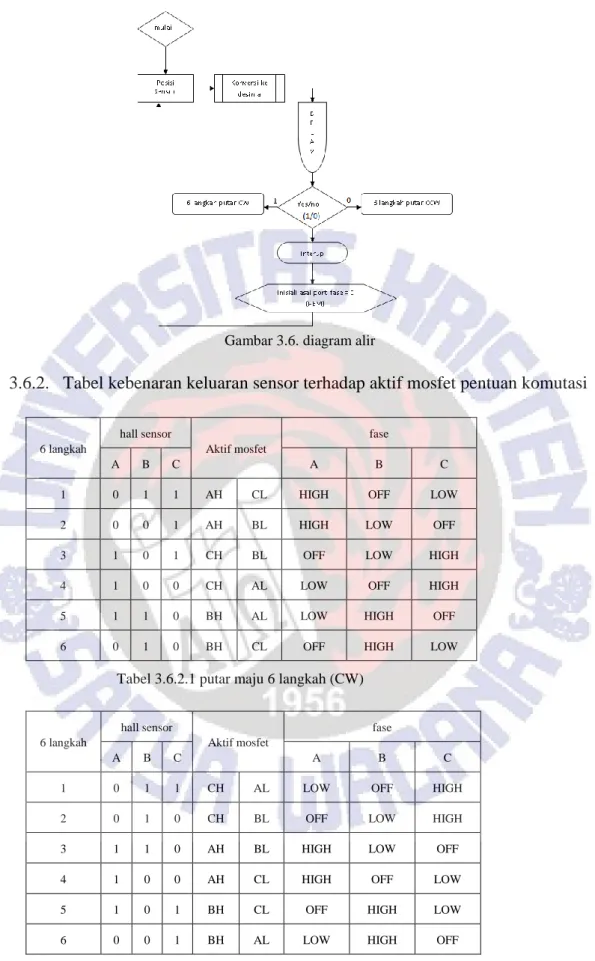
Pada perancangan alat dapat dilihat cara kerja alat dibuat sesederhana mungkin dari diagram alir pada gambar dimana hasil umpan balik motor berupa posisi melalui keluaran sensor hall effect digunakan sebagai referensi untuk menentukan arah putar motor dengan teknik komutasi 6 langkah.
25
Gambar 3.6. diagram alir
3.6.2. Tabel kebenaran keluaran sensor terhadap aktif mosfet pentuan komutasi
6 langkah
hall sensor
Aktif mosfet
fase
A B C A B C
1 0 1 1 AH CL HIGH OFF LOW
2 0 0 1 AH BL HIGH LOW OFF
3 1 0 1 CH BL OFF LOW HIGH
4 1 0 0 CH AL LOW OFF HIGH
5 1 1 0 BH AL LOW HIGH OFF
6 0 1 0 BH CL OFF HIGH LOW
Tabel 3.6.2.1 putar maju 6 langkah (CW)
6 langkah
hall sensor
Aktif mosfet
fase
A B C A B C
1 0 1 1 CH AL LOW OFF HIGH
2 0 1 0 CH BL OFF LOW HIGH
3 1 1 0 AH BL HIGH LOW OFF
4 1 0 0 AH CL HIGH OFF LOW
5 1 0 1 BH CL OFF HIGH LOW
6 0 0 1 BH AL LOW HIGH OFF
26
Keterangan:
HIGH = arah arus masuk ke fase aktif dari driver LOW = arah arus keluar fase aktif ke fase aktif OFF = fase tidak aktif
3.6.3. Pengontrolan putaran motor
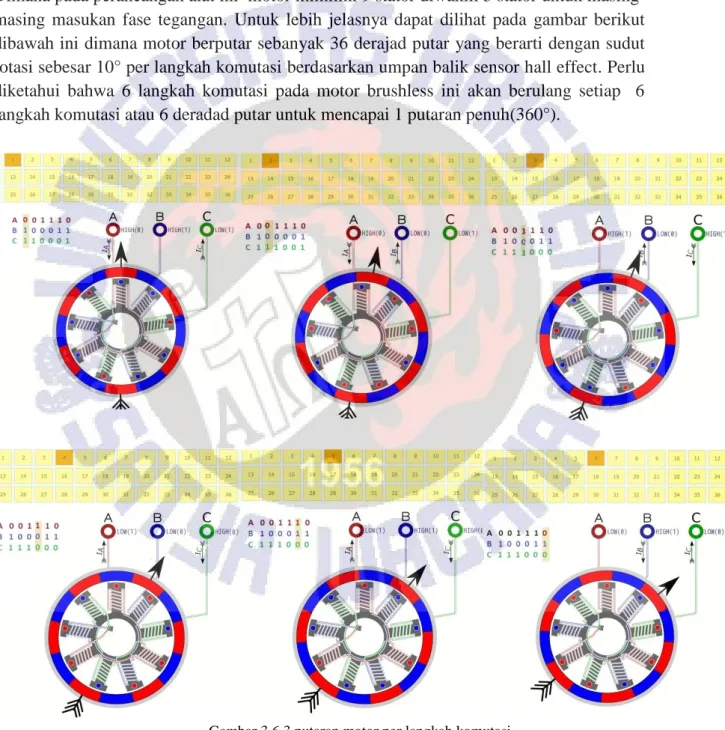
Disini penulis merancang putaran motor selambat mungkin pada pemetaan delay dengan tujuan mendapatkan prinsip kerja motor berdasarkan konstruksi dan konfigurasi motor. Sehingga untuk pengaruh kecepatan waktu on/off dari mosfet dapat diabaikan. Dimana pada perancangan alat ini motor mimiliki 9 stator diwakili 3 stator untuk masing-masing masukan fase tegangan. Untuk lebih jelasnya dapat dilihat pada gambar berikut dibawah ini dimana motor berputar sebanyak 36 derajad putar yang berarti dengan sudut rotasi sebesar 10° per langkah komutasi berdasarkan umpan balik sensor hall effect. Perlu diketahui bahwa 6 langkah komutasi pada motor brushless ini akan berulang setiap 6 langkah komutasi atau 6 deradad putar untuk mencapai 1 putaran penuh(360°).
27
3.6.4. Kecepatan putar motor
3.6.4.1. Pengontrolan kecepatan
Disini penulis menggunakan pembangkit PWM dari mikrokontroler ATmega328 karena memiliki 6 keluaran PWM. Sebagai pengontrol digunakan potensio 10K dengan referensi tegangan sebesar 5 volt pada ADC mikrokontroler ATmega328.
3.6.4.2. Penampil kecepatan
Untuk mendapatkan kecepatan putar motor pada perancangan alat ini penulis mengambil sampel dari salah satu keluaran sensor hall effect. Pada perancangan ini dapat dilihat bahwa 1 peride sensor diwakili oleh 6 langkah komutasi, sehingga dalam 1 putaran penuh terdapat 6 siklus atau 6 pulsa yang diberikan pada input tacho meter digital.
3.6.5. Pengamatan
3.6.5.1. Pengamatan effesiensi
Pada perancangan ini penulis memberi jumper keluaran dari fase agar praktikan dapat mengamati tegangan keluaran motor sehingga mengetahui effisiensi dari motor brushless. Penulis mengakui bahwa metode pengamatan ini tidak dapat memberikan nilai keakuratan yang tinggi. Adapun penampil tegangan(voltmeter) dan arus(amperemeter) pada catu daya agar praktikan dapat membandingkan antara pasokan daya dan keluaran daya dari motor brushless.
Gambar 3.6.5.1 pengukuran arus motor (Iout)
in AH in BL M1 1 DC V NO DATA + V+12 12V + 470uF/16 V J3 q15 q13 q11 IRF540 IRF540 IRF540 IRF9540 IRF9540 IRF9540 R9 150 R8 150 R7 150 R6 430 R5 430 R4 430 R3 470 R2 470 R1 470
28
Gambar 3.6.5.2 pengukuran Vout
Pengukuran arus keluaran menggunakan 1 buah multimeter dengan menambah hambatan 1 ohm pada salah satu fase aktif, sedangkan pengukuran tegangan keluaran adalah pengukuran tegangan pada dua fase yang aktif bersamaan menggunakan 2 buah multimeter dimana M1 mewakili tegangan high dan M2 mewakili tegangan low.
3.6.5.2. Pengamatan umpan balik sensor
Pada perancangan ini pengamatan umpan balik motor berupa sinyal posisi dari sensor digunakan sebagai referensi untuk pengukuran kecepatan motor pada penampil(tachometer digital). Pada pengamatan keluaran sensor terlihat bahwa pengkondisian sensor akan berulang setiap 6 langkah komutasi dalam mencapai 1 putaran penuh, adapun tiap keluaran sensor pada 6 langkah komutasi membentuk 1 periode pulsa.
Untuk mempermudah perhitungan keluaran sensor 3 bit hanya diambil 1 bit sebagai referensi, sehingga untuk mencapai 1 putaran penuh 3600 setara dengan 6 siklus. Dimana 6 siklus terdiri dari 36 langkah komutasi, sehingga 1 siklus = 1 periode pulsa untuk satu sensor hall effect. Oleh karena itu 3600 = 6 Hz atau 6 pulsa per detik. Kesimpulannya dengan menggunakan delay 100(1 detik)/pulsa untuk 1 menit = (1/6)*60. Atau setara dengan 10 pulsa per menit untuk mencapai 1 putaran penuh.
M1 M2 in BL in AH DC V NO DATA DC V NO DATA + V+1212V + 470uF/16 V J3 q15 q13 q11 Q6 IRF540 Q2 IRF540 Q4 IRF540 Q3 IRF9540 IRF9540 IRF9540 R9 150 R8 150 R7 150 R6 430 R5 430 R4 430 R3 470 R2 470 R1 470