Side Scan Sonar
Deskripsi AlatSonar merupakan teknik yang menggunakan perambatan g elombang suara di bawah air digunakan untuk penunjuk arah, komunikasi atau mendeteksi kapal-kapal laut. Sistem sonar dapat diartikan sebagai penentuan posisi dengan metode akustik (acoustic location). Side-scan sonar adalah salah satu alat dengan prinsip sistem sonar yang digunakan secara efisien melihat penampaan dasar laut dengan area yang besar. Alat ini digunakan untuk pemetaan dasar laut untuk berbagai tujuan, termasuk penciptaan nautical charts, identifikasi maupun deteksi objek bawah air dan fitur bathimetri. Side scan sonar biasa digunakan untuksurvei batimetri atau arkeologi maritim, dalam kaitannya dengan sampel dasar laut mampu memberikan pemahaman tentang perbedaan-perbedaan dalam material dan tipe tekstur dasar laut.
Gambar 1. Side Scan Sonar
Side scan sonar menggunakan perangkat yang memancarkan pulsa berbentuk kipas ke arah dasar laut di berbagai sudut tegak lurus terhadap lintasan dari sensor melalui air, yang dapat ditarik dari sebuah kapal permukaan atau kapal selam,atau dipasang pada kapal lambung. Side Scan Sonar mempunyai kemampuan menggandakan (menduplikasikan) beam yang diarahkan pada satu sisi ke sisi lainnya. Sehingga kita bisa melihat ke kedua sisi, memetakan semua area penelitian secara efektif dan menghemat waktu penelitian.
Penggunaan posisi dengan metode akustik telah digunakan jauh sebelum adnya teknologi radar. Sistem sidescan mengirimkan pulsa akustik pada suatu sisi dari receiver dan merekam amplitude energi balikan dari pulsa yang dipancarkan oleh sensor. Tiap pancaran pulsa, satu lajur kecil (sekitar 100 sampai 200 m ke tiap sisi) dari dasar laut dipetakan.Tiap pergerakan kapal, lajur ke lajur dipetakan. Pada dasar laut yang datar sempurna semua energi dipantulkan dari sesor sonar dan tidak ada sinyal yang terekam. Dalam
faktanya, dasar laut tidak rata sempurna. Ketidakteraturan seperti bebatuan dan riak-riak air karena pantulan (backscatter) dari energi akustik, dan sistem dapat menyediakan informasi secara kasar keadaan dasar laut.
Citra hasil perkaman Side-scan sonar juga alat digunakan untuk mendeteksi puing-puing (objek pengamatan, contoh kapal karam) dan penghalang lain di dasar laut yang mungkin berbahaya untuk pengiriman atau untuk instalasi dasar laut oleh industri minyak dan gas. Selain itu, status pipa dan kabel di dasar laut dapat diselidiki dengan menggunakan sisi-scan sonar. Side-scan data yang sering diperoleh bersama denganbathymetrik soundings dan sub-bottom profilerdata, sehingga memberikan sekilas struktur dangkal dasar laut. Side-scan sonar juga digunakan untuk penelitian perikanan, pengerukan operasi dan studi lingkungan.
Mekanisme Kerja Side Scan Sonar
SSS menggunakan Narrow beam pada bidang horizontal untuk mendapatkan resolusi tinggi di sepanjang lintasan dasar laut (Klien Associates Inc, 1985). SSS menggunakan prinsip backscatter akustik dalam mengindikasikan atau membedakan kenampakan bentuk dasar laut atau objek di dasar laut (Russel, 2001 dalam Edi, 2009). Material seperti besi, bongkahan, kerikil atau batuan vulkanik sangat efisien dalam merefleksikan pulsa akustik (backscatter kuat). Sedimen halus seperti tanah liat, lumpur tidak merefleksikan pulsa suara dengan baik (backscatter lemah). Reflektor kuat akan menghasilkan pantulan backscatter yang kuat sedangkan reflektor lemah menghailkan backscatter yang lemah. Dengan pengetahuan akan karakteritik ini, pengguna SSS dapat menguji komposisi dasar laut atau objek dengan mengamati pengembalian kekuatan akustik (Tritech International Limited, 2008). Side Scan Sonar (SSS) dapat dipasang pada lunas kapal atau ditarik di belakang kapal. Ilustrasi pemasangan SSS menggunakan towed body dapat dlihat pada gambar 3 (a dan b).
Magnetometer
Dari Wikipedia bahasa Indonesia, ensiklopedia bebasMagnetometer adalah sebuah instrumen pengukuran yang digunakan untuk dua tujuan umum - untuk mengukur magnetisasi bahan magnetik seperti feromagnet, atau untuk mengukur
kekuatan dan, dalam beberapa kasus, arah medan magnet pada suatu titik dalam ruang angkasa (juga dikenal sebagai Gaussmeter atau magnetometer survei).
Magnetometer pertama kali ditemukan oleh Carl Friedrich Gauss pada tahun 1833 dan perkembangan penting dalam abad ke-19 termasuk Hall Effect yang masih banyak digunakan.
Referensi
Hollos, Stefan; Hollos, Richard (2008). Signals from the Subatomic World: How to Build a Proton Precession Magnetometer. Abrazol Publishing. ISBN9781887187091.
Ripka, Pavel, ed. (2001). Magnetic sensors and magnetometers. Boston, Mass.: Artech House. ISBN9781580530576.
MAGNETOMETER
Alat utk mengukur medan magnet bumi namanya magnetometer.
Hasil pengukurannya adalah medan magnet absolut, ketelitiannya biasanya sampai 1 nt (nano tesla)
Cara mengukurnya bisa dgn magnetometer portable (alatnya digendong seperti tas\ punggung), bisa dgn aero magnetometer (yg ini digandeng dgn pesawat) dan menggunakan kapal laut.
Cara Kerja Alat :
• Cara kerja proton precession magnetometer : • Prinsip kerjanya menggunakan presesi dari proton.
Medan magnet yg cukup kuat akan menginduksi proton (yg terdapat dalam cairan kaya hidrogen) sumbu putar proton akan mengikuti sumbu dari magnet medan magnet yg kuat dihilangkan sumbu putar proton akan berubah mengikuti sumbu medan magnet bumi.
Kuat ke medan magnet bumi) disebut dengan presesi. Perubahan arah sumbu putar ini yangkemudian diterjemahkan oleh alat menjadi pembacaan besarnya medan magnet bumi di lokasi tsb.
GLOBAL POSITIONING SYSTEM (GPS)
Peralatan ini digunaka untuk mengukur posisi titik pengukuran yang meliputi bujur, lintang, ketinggian, dan waktu. GPS ini dalam penentuan posisi suatu titik lokasi menggunakan bantuan satelit. Penggunaan sinyal satelit karena sinyal satelit
menjangkau daerah yang sangat luas dan tidak terganggu oleh gunung, bukit, lembah dan jurang.
Word-Class ROV
UHDTM Ultraheavy
Word-Class ROV
UHDTM yang memberikan kinerja dan tenaga hidrolik maksimum yang diperlukan dalam ultraheavy-tugas Word Class ROV untuk mengakomodasi pasar yang berkembang untuk tugas-tugas pembangunan air yang dalam, seperti instalasi hisap tumpukan, dan aplikasi lain yang mendapatkan keuntungan dari mengarahkan listrik dari propulsi untuk operasi perkakas.
Aplikasi
Dukungan Konstruksi dalam Subsea
pipeline Inspection
Visibilitas rendah Rig-Decommisioning
Kita Bicara Tentang Gerak ROV
Pada dasarnya ROV dapat bergerak/bermanuver disebabkan oleh gaya atau dorongan yang dihasilkan oleh baling-baling. Karena ada gaya tersebut, maka sistem
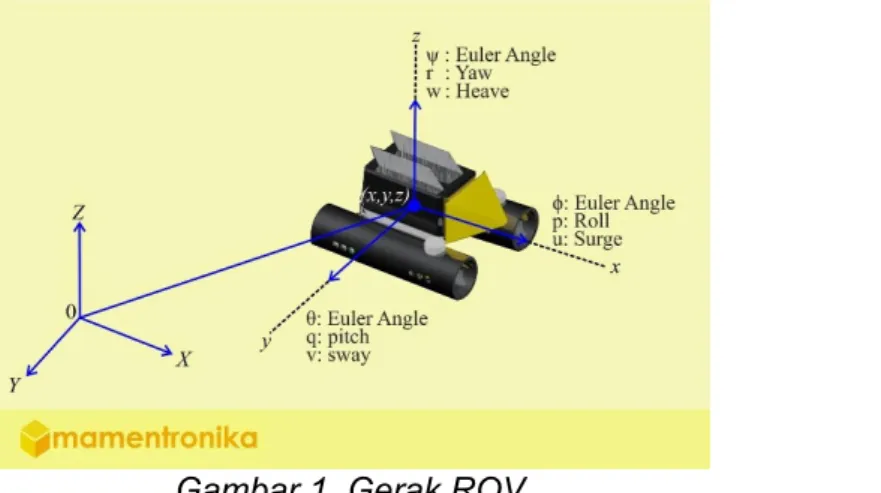
kesetimbangan benda tak lagi berlaku. Sama seperti pesawat terbang, ROV memiliki 6 derajat kebebasan (6 degree of freedom/DOF), 3 gerak translasi dan 3 sisanya gerak rotasi. Coba perhatikan gambar 1.
Gambar 1. Gerak ROV
Dari gambar 1 tersebut terdapat 3 sumbu (x,y,z) abaikan dulu 3 sumbu lain (X,Y,Z). Perhatikan istilah-istilah pada masing-masing sumbu.
Pada Sumbu x
Surge : artinya ROV bergerak maju/mundur searah sumbu x. Roll : merupakan gerak rotasi terhadap sumbu x.
Pada Sumbu y
Sway : artinya ROV bergerak ke samping searah sumbu y.
Pitch : merupakan gerak rotasi terhadap sumbu y, gerakanya seperti menganggukan kepala.
Pada Sumbu z
Heave : artinya ROV bergerak ke atas/bawah searah sumbu z. Yaw : merupakan gerak rotasi terhadap sumbu z, gerakanya seperti
menggelengkan kepala.
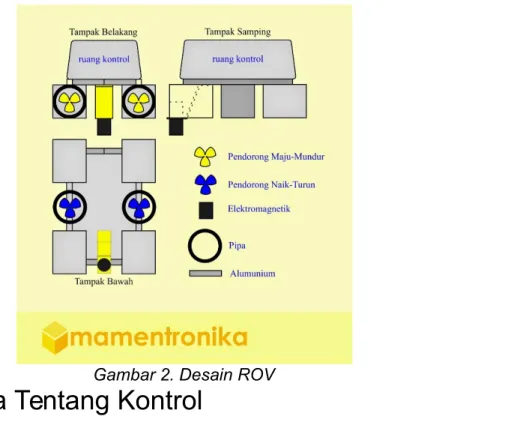
Nah di ROV yang ane buat tidak semua gerak dapat dilakukan (ini tergantung kebutuhan). Hanya gerak surge, heave, dan yaw. Ketiga gerakan ini menggunakan 4 baling-baling, 2 di pasang di bagian ekor untuk mengakomodir gerak surge dan yaw, 2 sisanya dipasang di bagian samping. Untuk lebih jelas silakan perhatikan gambar 2.
Gambar 2. Desain ROV
2. Kita Bicara Tentang Kontrol
Dalam dunia kontrol seperti biasa kita akan membagi sebuah sistem yang kompleks menjadi 3 subsistem, yaitu:
1. Input 2. Output 3. Kontrol
Input adalah data yang masuk ke dalam sistem kontrol untuk kemudian diolah oleh suatu algoritma tertentu dan digunakan untuk mempengaruhi kerja output. Pada ROV, input didapat dari remote control. Lihat Gambar 1. Sedangkan output dihubungkan dengan motor untuk menggerakan baling-baling (garis biru pada gambar 1 menunjukan arah gerak ROV). Perubahan gerak output tergantung dari input dan algoritma yang kita tanamkan ke dalam sistem kontrol.
Gambar 1. Ilustrasi Kontrol ROV
Untuk sistem kontrol sendiri, disini ane menggunakan platform arduino (agak males
desain PCB, haha).
Lalu, data seperti apa sih yang dimaksud? Remote control terbagi menjadi 2 modul, transmitter (Tx) dan Receiver (Rx), yang
terlihat di gambar 1 merupakan modul Tx, sedangkan modul Rx tertanam dalam ROV. Data yang ditransmisikan merupakan pulse position modulation (PPM) atau dalam bahasa indonesia bisa disebut sebagai modulasi gelombang pulsa(kotak) berdasarkan perubahan posisi per cycle time. PPM ini ditumpangkan ke sebuah gelombang elektromagnetik (gelombang radio) dengan besar frekuensi 2.4 GHz dan diterima oleh modul Rx. Dari modul Rx inilah PPM dibaca arduino untuk di olah.
Gambar 2. Modul Rx
Data hasil olahan kemudian dijadikan nilai rekomendasi untuk menggerakan baling-baling. Algoritma untuk menggerakan motor brushless berbeda dengan motor DC. Tunggu artikel selanjutnya untuk lebih tau.
Inspection and Rescue ROV
Cara Kerja ROV, Alat Pencari AirAsia QZ8501
Sebelum penyelam diturunkan, ROV akan diturunkan untuk memastikan keberadaan badan pesawat.
Ilustrasi ROV (wikipedia)
Guna mendeteksi keberadaan badan pesawat AirAsia QZ8501, Basarnas menggunakan ROV (Remotely Operated Vehicles).
Dikutip dari The Guardian Kepala Badan SAR Nasional Bambang Soelistyo
mengungkap bahwa ROV akan diturunkan ke bawah laut untuk mengambil gambar yang diindikasi merupakan badan pesawat AirAsia QZ8501. “Diperkirakan objek tersebut ada di dasar laut pada kedalaman 30 meter,” ujar Soelistyo.
ROV adalah robot dengan kemampuan mengamati benda di lautan dan dikendalikan dengan remote control secara langsung dari atas permukan air. Dalam upaya
pencarian AirAsia QZ8501, Basarnas menggunakan ROV dengan panjang 50 centimeter dengan bobot lima kilogram.
Berdasarkan informasi dari berbagai sumber, penurunan ROV mungkin terkendala arus kuat. Bobot ROV yang hanya lima kilogram membuatnya rentan terbawa arus yang berkecepatan lebih dari dua knot. “Kalau kecepatan di atas itu, alatnya bisa terbawa arus,” ujar koordinator penyelam BSG Ardiansyah Putra. Menurut Putra, ROV berwarna kuning ini mampu turun hingga kedalaman 100 meter.
Sebelum penyelam turun pada suatu lokasi, ROV akan diturunkan untuk memastikan keberadaan pesawat. ROV dengan kamera di setiap sisinya akan mengeluarkan sonar untuk mendeteksi keberadaan benda di bawah laut.
Ketika sonar mendeteksi adanya benda padat, maka alat tersebut akan mengeluarkan bunyi. Jangkauan sonar ROV hingga radius 60 meter. Setelah dipastikan adanya benda terdeteksi oleh sonar, barulah pilot ROV
mengarahkan robot mendekati benda tersebut. Kamera yang berada pada setiap sisi ROV akan mengambil gambar sekelilingnya.
Hasil gambar dari ROV akan terlihat pada monitor di permukaan dan pilot pun dapat memastikan ada atau tidaknya badan pesawat.
Setelah adanya kepastian ditemukan badan pesawat AirAsia, penyelam baru akan diterjunkan untuk melakukan proses evakuasi.