DETEKSI OBYEK BERBASIS WARNA DAN UKURAN DENGAN BANTUAN
INTERAKSI KOMPUTER-MANUSIA
Rahmadi Kurnia dan Silvaningrum Nurhadi Jurusan Elektro, Fakultas Teknik, Universitas Andalas
Email: [email protected] ABSTRACT
The capability of machine vision are different than human vision, because it required visual process first. It known object by it features, such as colors, size, position, shape etc. Feature color and size are used in this project.
The first process for visual processing is segmentation. Since the project used color picture, multilevel color component thresholding is picked for this project. It threshold color by it HLS (Hue Lightness Saturation) component. After these steps are completed, the next step is called labelling. It used for knowing the area of an object, by calculating the pixels object. Area is used to define “Big”, “Enough” and “Small”.
System of object detection which is build in this project is use dialog box. The system detects the object by asking user some questions related with feature of object. The result of the system then compared to visual survey from 9 respondent, by calculating how many questions are emerged from both step. The result of the system from this project defined good, because the maximum question that emerged to detect object are equal to minimum question from respondent.
Keywords: segmentation, human-komputer dialog, labelling, size of object
PENDAHULUAN
Manusia memiliki kemampuan visual dalam satu sistem yang utuh. Sistem visual manusia tersebut terdiri atas gabungan dari proses perekaman dan pendeteksian obyek. Oleh karenanya, manusia memiliki kemampuan untuk mengenali obyek tertentu dari sekumpulan obyek yang dilihatnya. Selain itu, manusia juga mengetahui penamaan tiap obyek, yang tentunya akan mempermudah dalam mendeteksi suatu obyek. Kemampuan-kemampuan visual manusia yang dipaparkan diatas, sangat berbeda dengan kemampuan sistem visual mesin (machine vision). Pada sistem visual mesin, hasil perekaman alat optik tidak dapat langsung diterjemahkan, didefinisikan dan dikenali oleh komputer. Oleh karenanya, pada sistem visual mesin dibutuhkan proses pengolahan citra terlebih dahulu.
Proses pengolahan citra tingkat rendah/ dasar (low level image processing) yang dapat digunakan adalah segmentasi. Dikarenakan citra yang digunakan adalah citra berwarna, maka dari itu dipilih metoda segmentasi amplitudo yaitu multilevel color component thresholding (pemberian ambang batas pada tiap-tiap tingkatan warna). Pada metoda ini, citra akan diberikan ambang batas untuk tiap komponen warna HLS-nya. Selanjutnya, hasil keluaran proses segmentasi warna yang berupa informasi citra ini nantinya akan digunakan untuk pengolahan citra lebih lanjut.
Pengolahan lebih lanjut dari hasil segmentasi warna ini adalah deteksi obyek (object detection). Pendeteksian obyek dalam suatu citra merupakan suatu permasalahan mendasar dalam banyak aplikasi analisis citra (image analysis). Salah satu aplikasi yang juga menggunakan deteksi obyek sebagai dasar analisanya adalah bidang ilmu HRI (Human Robot Interaction). Misalnya, sebuah robot dapat mengerjakan tugas-tugas yang diberikan jika ia telah diprogram dengan berbagai klasifikasi tertentu. Untuk mengerjakan suatu tugas, robot terlebih dahulu harus mengenal benda yang akan ditanganinya. Peranan deteksi obyek dalam hal ini sangat penting.
Telah cukup banyak penelitian dan tulisan yang mengambil topik mengenai object detection ini diantaranya adalah:
a. Sheldon Greene[1] dalam Tugas Akhirnya yang berjudul “Mobile Robot Learning and
Navigation with Human-Robot Interaction” yang membahas tentang algoritma pembelajaran
dan navigasi robot dengan HRI, tujuannya software HRI digunakan untuk meningkatkan perfomansi dari robot-robot dalam berinteraksi, kemampuan mengenali lingkungannya, dan pergerakan robot tersebut. Interaksi antara manusia dengan robot nantinya dilakukan melalui sintesis suara, dimana robot dibuat dapat mengenali suara dan merespons perintah. Agar meningkatkan kemampuan mengenali lingkungannya, robot ditempatkan pada posisi tertentu, yakni dengan belajar mendeteksi dan mengenali obyek. Sedangkan untuk pergerakannya,
robot memiliki data awal mengenai lingkungan sekitarnya serta mengenali obyek terakhir yang ada didekatanya sehingga sewaktu-waktu dapat kembali ke posisi semula.
b. Manuela M. Veloso[2] dalam paper-nya yang berjudul “FOCUS: A Generalized Method for
Object Discovery for Robots that Observe and Interact with Humans” membahas metoda
algoritma FOCUS (Finding Object Classification through Use and Structure) agar robot mampu membedakan variasi sinyal, mengkombinasi struktur dan fungsi dari obyek, serta pengembangannya terhadap benda yang mirip. Jadi, robot yang berinteraksi dengan manusia harus mampu mengamati berbagai macam obyek yang digunakan manusia, serta menghubungkannya dengan definisi obyek tersebut dari kegunaannya. Misalnya, benda yang disebut dengan kursi adalah benda yang digunakan manusia untuk duduk. Terdiri atas beberapa macam, ada kursi meja makan, kursi roda, kursi taman, sofa, kursi kayu, kursi plastik. Kalau hanya dilihat dari bentuk dan ukurannya, robot akan sulit mengidentifikasi nama obyek tersebut. Maka robot awalnya dibekali dengan bentuk visual, properti yang berhubungan dengan obyek tersebut, serta observasi terhadap interaksi manusia dengan obyek tersebut.
Berdasarkan penelitian-penelitian diatas, maka penulis tertarik untuk mengimplimentasikannya dalam bentuk yang lebih sederhana. Berupa tahapan awal dari HRI yaitu pendeteksian obyek berdasarkan warna dan ukuran. Yang merupakan tahapan penting dalam pendeteksian obyek. Untuk memperoleh obyek yang diinginkan, maka ada dialog yang dilakukan antara manusia (user) dengan komputer, yang dilakukan menggunakan media keyboard.
Langkah pertama dalam penelitian ini adalah mendeteksi warna.Berbagai macam warna dapat diperoleh dari kombinasi warna-warna pokok (pemodelan warna). Pemodelan warna yang sering digunakan adalah pemodelan warna RGB (Red Green Blue), dan pemodelan warna HLS (Hue
Lightness Saturation). RGB
Sistem ruang warna RGB merupakan sistem ruang warna dasar, diperkenalkan oleh
National Television System Committee (NTSC) yang banyak digunakan untuk menampilkan citra berwarna pada monitor CRT. Sistem ini diilustrasikan menggunakan sistem koordinat tiga-dimensi seperti diperlihatkan pada Gambar 1.
Gambar 1: Sistem ruang warna RGB [5]
Pada Gambar diatas dapat kita lihat bahwa setiap warna akan diwakili oleh tiga buah nilai dalam koordinat tersebut yang menyatakan komponen warna RGBnya. Misalnya warna merah akan diwakili oleh titik (255,0,0). Sedangkan rentang nilai untuk setiap sumbu berkisar dari 0 sampai 255. Pada Gambar tersebut juga dapat dilihat bahwa warna cyan, magenta dan kuning merupakan warna komplementer dari warna merah, hijau, dan biru.
Dua buah warna disebut komplementer, jika campuran keduanya dengan perbandingan yang tepat menghasilkan warna putih. Misalnya magenta jika dicampur dengan perbandingan yang tepat dengan hijau menghasilkan putih. Oleh karena itu magenta disebut merupakan komplementer dari hijau.
HLS
Komponen warna HLS adalah ukuran kandungan warna yang dipengaruhi oleh Hue (H), Lightness (L) dan Saturation (S).
Gambar 2: Tingkatan Hue
b) Lightness (L) didefinisikan sebagai besarnya intensitas cahaya yang diterima oleh citra. Oleh karena itu semakin tinggi intensitas cahaya yang diterima, maka citra akan semakin terang. Namun demikian, intensitas cahaya yang diterima ini tanpa mempedulikan warna (kisaran nilainya antar gelap dan terang saja)
Gambar 3: Nilai intensitas yang lebih tinggi menciptakan warna ke arah putih, warna yang lebih terang c) Saturation (S) menunjukkan tingkat kemurnian atau pun kedalaman warna, sekaligus
menunjukkan seberapa besar suatu warna mengandung warna putih.
Gambar 4: Saat nilai saturasi berkurang, maka nilainya akan mendekati keabu-abuan
Gambar 5: HLS Color Space[10]
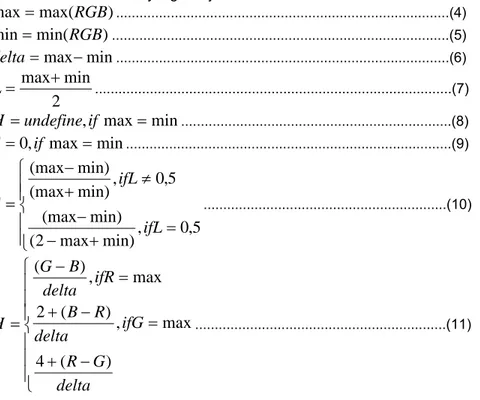
Pemetaan transformasi RGB ke HLS bersifat non-linear. Dimana L ditentukan dari lebarnya jangkauan warna RGB, S merupakan tingkatan relatif dari nilai RGB, dan H merupakan penempatan sudut relatif. Berikut adalah kode yang menjelaskan transformasi diatas:
)
max(
max
=
RGB
...(4))
min(
min
=
RGB
...(5)min
max−
=
delta
...(6)2
min
max+
=
L
...(7)min
max
,
=
=
undefine
if
H
...(8)min
max
,
0
=
= if
S
...(9)⎪
⎪
⎩
⎪⎪
⎨
⎧
=
+
−
−
≠
+
−
=
5
,
0
,
min)
max
2
(
min)
(max
5
,
0
,
min)
(max
min)
(max
ifL
ifL
S
...(10)⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
=
−
+
−
+
=
−
=
,
max
)
(
4
)
(
2
max
,
)
(
ifG
delta
G
R
delta
R
B
ifR
delta
B
G
H
...(11)
H
= H
×
60
...(12)0
,
360
≠
+
=
H
ifH
H
...(13) Tabel Pemodelan WarnaBerikut adalah tabel dari beberapa pemodelan warna[11]: Tabel 1: Model warna
Warna RGB Hue Hitam 0,0,0 -Merah 255,0,0 00 Hijau 0,255,0 800 Biru 0,0,255 1580 Ungu 128,0,128 1900 Kuning 255,255,0 400 Cokelat 150,75,0 190 Putih 255,255,255 -
Tabel pemodelan warna diatas diperoleh dari konversi langsung berdasarkan nilai RGB yang diperoleh dari referensi[11] ke custom color pada paint O/S Windows®
. Nilai H yang dibaca pada tabel mengikuti nilai standar O/S Windows®.
Secara manual, nilai H LS dapat diperoleh dengan rumus[14]:
)
)(
(
)
(
)]
(
)
[(
2
1
arccos
2 1B
G
B
R
G
R
B
R
G
R
H
−
−
+
−
−
+
−
=
...(14)⎩
⎨
⎧
>
−
≤
=
G
ifB
H
G
ifB
H
H
,
360
,
1 0 1 ...(15))
,
,
min(
3
1
R
G
B
B
G
R
S
+
+
−
=
...(16)3
B
G
R
L
=
+
+
...(17)Segmentasi Citra Berwarna
Segmentasi citra berwarna merupakan proses pengekstrakan satu atau beberapa daerah yang saling berhubungan (memiliki kriteria keseragaman/ homogenitas) dari suatu citra, yang diperoleh berdasakan fitur pada komponen spektral[9]. Komponen-komponen ini didefinisikan dalam model ruang warna. Selanjutnya proses segmentasi ini dapat ditingkatkan berdasarkan pengetahuan tambahan mengenai obyek yang ada dalam citra, seperti geometrik atau properti optikal lainnya.
Dalam analisa citra otomatis, warna merupakan deskriptor yang sangat berguna, yakni untuk menyederhanakan proses identifikasi dan ekstraksi obyek. Misalnya jika kita ingin mempartisi citra berdasarkan warnanya, maka kita dapat melakukannya pada setiap lapisan warna (baik pada HLS atau RGB).
Pada penelitian ini, digunakan metoda segmentasi pemberian ambang batas pada tiap-tiap tingkatan warna. Metoda ini mensegmen obyek berdasarkan komponen warnanya. Ambang batas yang dilakukan pada citra berwarna berbeda dengan ambang batas yang dilakukan pada citra biner maupun keabuan (grey scale).
Pada citra biner atau pun keabuan, hanya 2 batasan warna yang harus dibedakan, yaitu hitam dan putih. Atau bisa dikatakan hanya 2 macam warna. Pada metoda iterasi (ambang batas ditentukan secara berulang-ulang sampai nilai yang cocok ditemukan.) algoritmanya sebagai berikut:
1. Pilih nilai T awal untuk operasi threshold, biasnya nilai rata-rata dari intensitas citra. 2. Bagi citra menjadi dua daerah, misalnya R1 dan R2, menggunakan nilai T awal yang telah
ditentukan pada langkah pertama.
3. Hitung nilai rata-rata intensitas μ1 dan μ2 masing-masing untuk daerah R1 dan R2. 4. Hitung nilai threshold yang baru dengan rumus
2
2 1μ
μ
+=
T
.5. Ulangi langkah 2 sampai 4 hingga nilai-nilai μ1 dan μ2 tidak berubah lagi. Saat itulah nilai T merupakan nilai yang dicari.
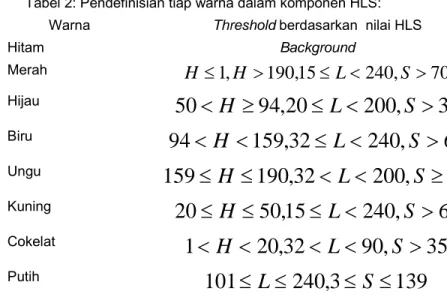
Setelah nilai dikonversikan ke dalam HLS barulah citra dapat diolah. Batasan-batasan untuk masing-masing warna pun ditentukan. Misalnya untuk warna merah; maka nilai hue berkisar kecil dari 1 atau besar dari 255, sedangkan lightness-nya dari 20 sampai 239, dan saturasinya besar dari 105. Demikian seterusnya untuk warna lain.
Ukuran Obyek
Manusia secara umum mengenal ukuran dengan 3 definisi, yaitu “Besar”, “Sedang” dan “Kecil”. Penilaian besar, sedang, maupun kecil untuk tiap-tiap orang pun bersifat subyektif. Artinya, seseorang bisa menganggap suatu benda itu dikatakan besar, namun orang yang lain mungkin mengatakan masih kurang besar. Oleh karena itu, diperlukan persamaan persepsi agar komputer pun nantinya mampu mendefinisikan suatu benda itu dikatakan “Besar”, “Sedang” atau “Kecil”.
Definisi menurut pandangan manusia adalah: sebuah obyek dikatakan cukup besar, jika ukurannya 5 sampai 10 kali dari obyek yang dikatakan kecil[15]. Untuk obyek yang ukurannya berada diantara obyek besar atau kecil, ini disebut obyek yang berukuran sedang. Permasalahannya adalah banyak benda yang terkadang sulit didefinisikan mana yang besar, sedang atau kecil jika obyeknya berbeda bentuk seperti obyek berikut:
Gambar 6: Macam-macam ukuran obyek
Sedangkan komputer, ia mampu menilai besar atau kecil dari jumlah piksel suatu obyek, perbedaan hanya beberapa piksel saja, komputer sudah mampu mendefinisikan mana benda yang besar, sedang dan kecil.
Untuk menyamakan persepsi dua sudut pandang inilah, maka penulis memilih menyatakan: “Kecil” < 2x Ukuran terkecil...(19)
2x Ukuran terkecil < “Sedang” < 10x Ukuran terkecil ...(20) “Besar” > 10x Ukuran terkecil...(21)
Dimana, ukuran terkecil merupakan ukuran obyek terkecil yang ada di dalam citra yang diolah. Agar tidak terjadi kesalahan dalam mengenali suatu obyek, maka jumlah piksel minimal yang dinyatakan sebagai obyek adalah 10 piksel.
Komputer mengetahui ukuran suatu obyek, dengan menghitung jumlah piksel yang dilakukan secara global pada citra. Proses scanning citra dilakukan mulai dari titik (0,0) sampai (N,M). Nilai akan bertambah saat piksel yang terdeteksi bukan background. Nilai bertambah 1, jika pada baris maupun kolom mendeteksi perbedaan warna dengan background sesuai setting yang diinginkan.
Rumus
∑∑
= ==
n i m jj
i
f
A
0 0)
,
(
...(22)[4] A=Area; Jumlah piksel.Gambar 7: Scanning luas obyek
Langkah Penelitian
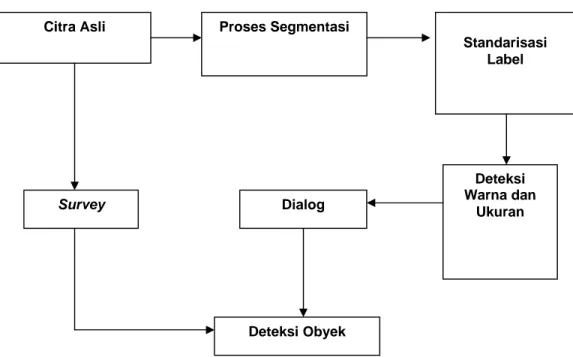
Gambar 8: Blok Kinerja Sistem
Citra sampel 1 terdiri atas obyek berwarna merah, kuning, hijau, biru,ungu, cokelat dan putih. Pada citra sampel 2 terdiri atas obyek berwarna merah muda, ungu dan hijau.
Sampel citra untuk menguji kemampuan sistem dalam mendeteksi ukuran obyek yang berwarna sama terdiri atas 4 sampel. Sampel terdiri masing-masing atas warna merah, hijau, kuning dan biru.
Gambar 9: Sampel ukuran warna biru
Sampel citra untuk menguji kemampuan sistem, baik dari segi warna maupun ukuran terdiri atas 4 sampel. Seperti diperlihatkan pada Gambar berikut:
Citra Asli Proses Segmentasi
Standarisasi Label Dialog Survey Deteksi Obyek Deteksi Warna dan Ukuran
Gambar 10: Sampel warna dan ukuran 1
Gambar 11: Sampel warna dan ukuran 2 Dialog Antara Manusia dengan Komputer
Dialog antara komputer dengan pengguna (user) dibutuhkan untuk menjalankan sistem ini. Sistem dieksekusi berdasarkan perintah atau hasil dialog antara komputer dengan pengguna. Setelah masukan data visual diberikan, komputer akan bertanya kepada pengguna untuk mendapatkan obyek yang dimaksud. Pertanyaan yang muncul berhubungan dengan ciri-ciri obyek khususnya fitur warna dan ukuran obyek tersebut. Pertanyaan tersebut nantinya dijawab oleh pengguna. Alat bantu yang digunakan adalah keyboard dan mouse, yang digunakan untuk menjawab pertanyaan ”apa” dan opsi jawaban ”ya” atau ”tidak”. Pertanyaan-pertanyaan akan terus muncul sampai obyek tersebut telah terdeteksi dengan benar.
Survey Terhadap Responden
Merupakan penilaian subyektif responden untuk menentukan obyek yang dideteksi. Di mana responden diperbolehkan bertanya mengenai ciri-ciri obyek yang dimaksud. Pertanyaan yang diajukan responden nantinya dibandingkan dengan kinerja sistem, oleh karenanya pertanyaan dibatasi pada warna dan ukuran obyek. Model pertanyaan yang diajukan berupa pertanyaan “apa” dan opsi jawaban “ya” atau “tidak”. Banyaknya jumlah pertanyaan yang muncul kemudian dibandingkan dengan banyaknya pertanyaan komputer. Kinerja sistem optimal jika jumlah pertanyaan yang muncul pada komputer maksimal sebanyak jumlah pertanyaan responden.
Tabel 2: Pendefinisian tiap warna dalam komponen HLS: Warna Threshold berdasarkan nilai HLS
Hitam Background Merah
H
≤
1
,
H
>
190
,
15
≤
L
<
240
,
S
>
70
Hijau50
<
H
≥
94
,
20
≤
L
<
200
,
S
>
35
Biru94
<
H
<
159
,
32
≤
L
<
240
,
S
>
60
Ungu159
≤
H
≤
190
,
32
<
L
<
200
,
S
≥
39
Kuning20
≤
H
≤
50
,
15
≤
L
<
240
,
S
>
65
Cokelat1
<
H
<
20
,
32
<
L
<
90
,
S
>
35
Putih101
≤
L
≤
240
,
3
≤
S
≤
139
HASIL DAN PEMBAHASAN
Hasil keluaran sistem pada penelitian ini merupakan deteksi obyek berdasarkan fitur warna dan ukuran. Hasil ini pun diperoleh dari dua analisa, yaitu analisa obyektif dan analisa subyektif. Analisa obyektif merupakan analisa yang diperoleh dari sistem komputer, yang nantinya sangat bermanfaat untuk dipergunakan ke tahap selanjutnya dari deteksi obyek. Sedangkan analisa subyektif merupakan analisa yang diperoleh dari hasil survey terhadap responden. Penjelasan lebih lanjut adalah sbb: Analisa Subyektif
Diperoleh dengan menggunakan 9 responden dengan latar belakang pendidikan rata-rata sedang menempuh pendidikan SI, dengan usia yang bervariasi dari 21-24 tahun. Dengan rincian: 4 orang perempuan, 5 orang laki-laki.
Responden diperlihatkan citra berwarna dengan beberapa kondisi obyek. Tiga macam variasi kondisi obyek yang diperlihatkan yaitu:
Citra 1 : Berbagai macam obyek dengan masing-masing memiliki warna berbeda. Citra 2 : Berbagai macam obyek berwarna sama dengan ukuran yang berbeda.
Citra 3 : Beberapa obyek yang berwarna sama dengan ukuran yang berbeda, terletak diantara obyek lain.
Gambar 12: Citra 1 Gambar 13: Citra 2 Gambar 14: Citra 3
Setelah responden diperlihatkan masing-masing Gambar diatas, selanjutnya responden diminta menebak obyek yang dimaksud penulis. Responden diberi kesempatan bertanya (dibatasi pada fitur warna dan ukuran obyek). Bentuk pertanyaan dibatasi pada ”apa” dan opsi pilihan jawaban ”ya” atau ”tidak”.
Tabel 3: Hasil Survey Terhadap Responden Responden Citra 1 Citra 2 Citra 3
1 1 2 3 2 1 1 2 3 1 1 2 4 2 2 4 5 1 1 2 6 3 2 2 7 4 2 2 8 1 1 2 9 1 1 2
Tabel 4: Pertanyaan minimal dan maksimal responden No Citra Jumlah Pertanyaan Minimal Jumlah Pertanyaan Maksimal Citra 1 1 4 Citra 2 1 2 Citra 3 2 4
Berdasarkan hasil survey yang dilakukan, rata-rata responden membutuhkan 1,6 pertanyaan (1 sampai 2 pertanyaan) untuk mendeteksi obyek pada citra 1, dan 1,4 pertanyaan (1
sampai 2 pertanyaan) untuk mendeteksi obyek pada citra 2, serta 2,3 pertanyaan (2 sampai 3 pertanyaan) untuk mendeteksi obyek pada citra 3.
Analisa Obyektif
Analisa obyektif dilakukan berdasarkan hasil citra yang diperoleh. Hasil citra tersebut merupakan hasil dari dialog antara pengguna dengan komputer. Berikut ini akan diperlihatkan tahap-tahap mengenai bagaimana sistem melakukan pemrosesan terhadap citra berwarna, berdasarkan perintah dari pengguna.
Awal mula sistem dijalankan dengan memberikan masukan data visual, yaitu memilih Gambar yang akan diproses. Sistem ini dijalankan dengan memilih perintah “Pilih Gambar“ pada toolbar dialog box. Setelah dipilih Gambar yang akan ditampilkan, maka Gambar original tersebut ditampilkan pada
picture box sebelah kiri. Selanjutnya muncul dialog box berikutnya di bawah picture box tersebut,
seperti berikut:
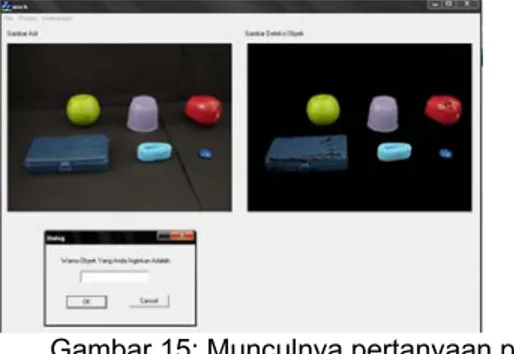
Gambar 15: Munculnya pertanyaan pertama
Proses segmentasi untuk semua warna yang ada otomatis terjadi, pada saat yang bersamaan muncul
dialog box pertama. Pengguna dipersilahkan mengetikkan warna yang ingin ditampilkan, dengan
mengisi edit box yang telah disediakan, misalnya kita ketikkan warna biru pada edit box:
Gambar 16: Ketik warna yang diinginkan
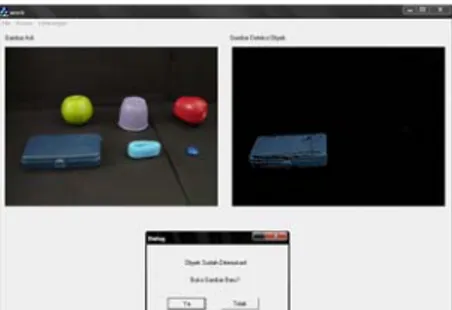
Selanjutnya proses pendeteksian obyek dilanjutkan. Dikarenakan yang diketikkan tadi adalah warna “ biru“, maka proses berjalan untuk kemudian hasilnya akan ditampilkan pada picture box sebelah kanan. Seperti diperlihatkan pada Gambar berikut:
Gambar 17: Munculnya pertanyaan ke-2
Pada kondisi contoh diatas, ada 3 obyek yang berwarna biru, maka muncul pertanyaan ke-2. Pertanyaan yang muncul tersebut adalah mengenai ukuran obyek. Jika pengguna memilih obyek yang berukuran “besar“, maka tampilan yang diperoleh diperlihatkan pada Gambar 18.
Gambar 18: Hasil deteksi obyek berdasarkan fitur warna dan ukuran
Setelah semua pertanyaan telah selesai dijawab oleh pengguna, maka diperoleh obyek yang diinginkan pengguna. Selanjutnya jika pengguna ingin memproses Gambar baru, pengguna hanya perlu memilih jawaban dialog box selanjutnya. Maka proses akan kembali dilakukan kembali ke awal.
Berdasarkan hasil eksekusi program yang dilakukan melalui interaksi antara pengguna dan komputer diatas. Kesimpulan yang dapat diambil adalah, bahwa komputer telah mampu
menyelesaikan tugas dengan baik.
Kinerja sistem ini diperlihatkan dalam tabel 5.3 berikut. Tabel 5: Kinerja Sistem Komputer
Kondisi Citra Dialog
Banyak Obyek dengan Variasi Warna Berbeda Tiap Obyek 1 Warna Obyek Sama dengan Ukuran Berbeda 1
Kondisi citra 2 Ditambah Obyek Lain 2
Sistem yang dibuat berbasiskan dialog. Oleh karena itu dialog merupakan eksekusi kunci dari program untuk menyelesaikan pendeteksian obyek tersebut.
Jumlah dialog yang muncul ini nantinya dibandingkan dengan pertanyaan yang muncul dari responden. Yakni tahapan berpikir manusia untuk menemukan obyek yang dimaksud.
KESIMPULAN
Berdasarkan analisis terhadap hasil penelitian baik secara subyektif maupun obyektif, dapat disimpulkan beberapa hal berikut:
1. Pada pendeteksian obyek untuk citra berwarna, fitur warna merupakan fitur awal yang harus diproses. Proses pengolahan yang digunakan adalah segmentasi warna. Pada penelitian ini nilai ambang batas untuk segmentasi diberikan berdasarkan nilai HLS tiap komponen warna. Tahapan yang disebutkan diatas tidak dapat dilewati oleh tahapan-tahapan yang lain.
2. Pada pendeteksian obyek, hasil keluaran dari segmentasi berwarna dilanjutkan dengan standarisasi label. Standarisasi label berguna untuk mendeteksi tiap obyek. Setelah tiap obyek dikenali, hal ini akan mempermudah dalam mencari jumlah piksel dari obyek tersebut. Tahapan ini penting karena merupakan dasar dari deteksi obyek selanjutnya. 3. Sistem yang dirancang pada penelitian ini, telah mampu mendeteksi obyek berdasarkan
warna dan ukuran dengan baik. DAFTAR PUSTAKA
[1] Greene, Sheldon.“Mobile Robot Learning and Navigation with Human-Robot
Interaction”.Tennessee State University: Tennessee.
[2] Veloso, Manuela. M. 2006. FOCUS: A Generalized Method for Object Discovery for Robots that
Observeand Interact with Humans. Paper di Jurusan Ilmu Komputer. CarnegieMellon
University: Pittsburgh USA.
[3] Adams, Julie A. 2003. Human-Robot Interaction Design: Understanding User Needs And
Requirements. Vanderbilt University: Tennessee.
[4] Munir, Renaldi.2004.Pengolahan Citra Digital dengan Pendekatan Algoritmik. Informatika: Bandung.
[5] Suhono Harso Supangkat. 1993. Teknologi Pemampatan Sinyal Gambar Dijital. Kompas: Jakarta.
[6] Pratt, William K.2001.Digital Image Processing, 3rd
[7] Astari, Rima.2003.Deteksi Wajah Menggunakan Analisa Paket Wavelet Manfaatkan Ciri Warna
Kulit. Dipresentasikan Pada: Seminar Nasional Opto Elektronika dan Aplikasi Laser Fakultas Teknik Universitas Indonesia Depok, 1-2 September.
[8] Ardisasmita, M. Syamsa.1999. Risalah Komputasi dalam Sains dan Teknologi Nuklir X, Jakarta
19-20 Oktober 1999 No. 1. P2TIK:Jakarta.
[9] Koschan, Andreas.1994.Colour Image Segmentation –A Survey-.Universitas Teknik.Berlin. [10] Shoaff, William.2002.Color,Illumination Models, and Shading.
[11] Frery, A.C. 2000. Color Research and Application. Web-Based Interactive Dynamics for Color Models Learning.
[12] Rinaldy, Wendi.1997.Analisa Operator Pendeteksi Edge dengan Teknik Spasial Domain, Jurusan Elektro Fakultas Teknik Universitas Indonesia:Jakarta.
[13] Microsoft. 2006. How To Converting Colors Between RGB and HLS (HBS), artikel ID 29240. Microsoft: United States.
[14] Kentaro Oda.2002. The Kyushu United Team in the Four Legged Robot.Dept. of Artificial Intelligence, Kyushu Institute of Technology: Japan.
[15] K.A.Snyder, E.J Garboczi. 1992. The Elastic Moduli of Random Two-Phase Composites:
![Gambar 1: Sistem ruang warna RGB [5]](https://thumb-ap.123doks.com/thumbv2/123dok/4482379.3247908/2.918.355.605.592.767/gambar-sistem-ruang-warna-rgb.webp)