MODEL FUNGSI TRANSFER MASUKAN TUNGGAL
DAN TERAPANNYA
Skripsi
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Sains
Program Studi Matematika
Oleh:
Sekar Ayuningtyas Anggraito
NIM: 093114007
PROGRAM STUDI MATEMATIKA JURUSAN MATEMATIKA
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
SKRIPSI
MODEL FUNGSI TRANSFER MASUKAN TUNGGAL
DAN TERAPANNYA
Oleh:
Sekar Ayuningtyas Anggraito
NIM: 093114007
Telah disetujui oleh:
Pembimbing
SKRIPSI
MODEL FUNGSI TRANSFER MASUKAN TUNGGAL
DAN TERAPANNYA
Dipersiapkan dan ditulis oleh:
Sekar Ayuningtyas Anggraito
NIM: 093114007
Telah dipertahankan di depan Panitia Penguji
pada tanggal 21 Mei 2013
dan dinyatakan telah memenuhi syarat
Susunan Panitia Penguji
Nama Lengkap Tanda Tangan
Ketua Lusia Krismiyati Budiasih, S.Si.,M.Si ……….. Sekretaris Ch. Enny Murwaningtyas, S.Si.,M.Si ……….. Anggota Ir. Ig. Aris Dwiatmoko, M.Sc ………..
Yogyakarta, 21 Mei 2013
Fakultas Sains dan Teknologi
Universitas Sanata Dharma
Dekan,
HALAMAN PERSEMBAHAN
Karya ini adalah tugu peringatan akan kesetiaan Tuhan Yesus dalam hidupku.
Pertolonganku ialah dari Tuhan, yang menjadikan langit dan bumi. Ia
takkan membiarkan kakimu goyah. Penjagamu tidak akan terlelap.
(Mazmur 121: 2-3)
Segala perkara dapat kutanggung di dalam Dia yang memberi kekuatan
kepadaku.
(Filipi 4: 13)
Karya ini aku persembahkan untuk:
Orang-orang terkasih: papa, mama, Gandrung, dan Galih
Orang-orang terhebat: sahabat-sahabat matematika 2009
PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa skripsi yang saya tulis ini tidak
memuat karya atau bagian karya orang lain, kecuali yang telah disebutkan dalam
kutipan dan daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, 7 Mei 2013
Penulis
ABSTRAK
Sekar Ayuningtyas Anggraito. 2013. Model Fungsi Transfer Masukan
Tunggal dan Terapannya. Skripsi. Program Studi Matematika, Jurusan
Matematika, Fakultas Sains dan Teknologi, Universitas Sanata Dharma, Yogyakarta.
Topik yang dibahas dalam skripsi ini adalah model peramalan menggunakan fungsi transfer yang disebut model fungsi transfer. Model fungsi transfer adalah suatu model yang menggambarkan nilai prediksi masa depan dari suatu runtun waktu (disebut deret keluaran) berdasarkan nilai-nilai masa lalu runtun waktu itu sendiri dan berdasarkan pula pada satu atau lebih runtun waktu (disebut deret masukan) yang berhubungan dengan deret keluaran tersebut. Dalam skripsi ini, model fungsi transfer yang dibahas hanya dibatasi untuk model fungsi transfer masukan tunggal.
Tiga tahapan utama untuk membangun model fungsi transfer adalah identifikasi model, pendugaan parameter model, dan pemeriksaan diagnostik model. Tahap identifikasi meliputi: mempersiapkan deret masukan dan keluaran, pemutihan deret masukan, “pemutihan” deret keluaran, penghitungan korelasi -silang dan otokorelasi, pendugaan langsung bobot respon impuls, penetapan
, , untuk model fungsi transfer, pendugaan awal deret gangguan, peneteapan
�, � untuk ARIMA �, 0, � dari deret gangguan. Pendugaan parameter
model menggunakan metode Levenberg-Marquardt. Tahap pemeriksaan diagnostik pada model terbagi menjadi dua, yaitu: analisis galat untuk korelasi silang dan analisis galat untuk otokorelasi.
Model fungsi transfer ini diterapkan pada kasus hubungan penjualan dan biaya iklan (Makridakis, dkk, 1999). Data tersebut dianalisis mengikuti tahapan-tahapan yang ada dengan memberikan beberapa alternatif pilihan model yang mungkin dan alasan pemilihan model. Model terbaik yang akhirnya diperoleh untuk kasus tersebut adalah sebagai berikut:
= (1,143 + 1,629�+ 0,376�2−0,468�3−0,73�4−0,499�5)
(1−0,269�) −2
+(1−0,261� −0,625�
2−0,106�3)
1−1,415�+ 0,844�2
ABSTRACT
Sekar Ayuningtyas Anggraito. 2013. Single-input Transfer Function
Model and Its Application. A Thesis. Marhematics Study Program,
Departement of Mathematics, Faculty of Science and Technology, Sanata Dharma University, Yogyakarta.
The topic that covered in this thesis is a forecasting model using transfer function called transfer function model. Transfer function model is a model discribing the prediction of future values of a time series (called output series) based on the past values of the time series itself and also based on one or more time series (called input series) that associated with the output series. In this thesis, the transfer function model discussed is limited to single-input transfer function model.
Three main steps to build transfer function model are identification, estimation, and diagnostic checking of transfer function model. The identification step are: preparation the input and output series, prewhitening the input series,
“prewhitening” the output series, determination the cross correlation and autocorrelation, direct estimation of impulse response weights, determination of
, , of the transfer function model, initial estimation of noise series, determination �, � for ARIMA �, 0, � of noise series. Parameter estimation is done by using of Levenberg-Marquardt method. There are two steps in diagnostic checking: residual analysis of cross correlation and residual analysis of autocorrelation.
The transfer function model is applied on the case of the relationship between sales and advertising costs (Makridakis, 1999). The data was analyzed according to the steps above and selecting the best model among several possible models. Finally, we found the best model for that case, that is:
= (1,143 + 1,629�+ 0,376�2−0,468�3−0,73�4−0,499�5)
(1−0,269�) −2
+(1−0,261� −0,625�
2−0,106�3)
1−1,415�+ 0,844�2
LEMBAR PERNYATAAN PERSETUJUAN
PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma:
Nama : Sekar Ayuningtyas Anggraito
NIM : 093114007
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul:
Model Fungsi Transfer Masukan Tunggal dan Terapannya
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan
kepada Perpustakaan Universitas Sanata Dharma untuk menyimpan, mengalihkan
ke dalam bentuk media lain, mengelolanya dalam bentuk pangkalan data,
mendistribusikan secara terbatas, dan mempublikasikannya di internet atau media
lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya maupun
memberikan royalti kepada saya selama tetap menyantumkan nama saya sebagai
penulis.
Demikian pernyataan ini saya buat dengan sebenarnya.
Dibuat di Yogyakarta
Pada tanggal : 7 Mei 2013
Yang menyatakan
KATA PENGANTAR
Puji syukur penulis panjatkan kepada Tuhan Yesus Kristus yang selalu
memberikan hikmat dan menyertai penulis sehingga penulis mampu
menyelesai-kan skripsi ini dengan lancar dan baik. Skripsi ini dimaksudmenyelesai-kan untuk memenuhi
salah satu syarat dalam menyelesaikan pendidikan strata I (SI) dan memperoleh
gelar Sarjana Sains pada Program Studi Matematika di Universitas Sanata
Dhar-ma Yogyakarta.
Penulis menyadari bahwa proses penulisan skripsi ini melibatkan banyak
pi-hak. Oleh karena itu pada kesempatan ini penulis sudah selayaknya mengucapkan
terima kasih kepada:
1. Lusia Krismiyati Budiasih, S.Si., M.Si. selaku Ketua Program Studi
Ma-tematika atas dukungannya.
2. Ir. Ig. Aris Dwiatmoko, M.Sc. selaku dosen pembimbing yang telah
sa-bar dalam membimbing, memberi pengetahuan dan memberi saran-saran
kepada penulis selama proses penulisan skripsi ini.
3. Bapak, Ibu, dan Romo, dosen-dosen yang telah memberi pengetahuan
kepada penulis selama proses kuliah ini.
4. Kedua orang tuaku dan adik-adikku yang senantiasa memberikan doa,
motivasi dan dukungannya.
5. Keluarga besar Gereja Perhimpunan Injili Baptis Indonesia “Amanat
Agung” yang setia mendoakan kelancaran proses penyelesaian skripsi
ini.
6. Teman-teman Matematika 2009: Nana, Faida, Ochie, Etik, Jojo, Erlika,
Dimas, dan Doweek, terima kasih untuk kebersamaan dalam suka
mau-pun duka dan semangat yang selalu diberikan kepada penulis. Kamu
ti-dak pernah berjuang sendiri.
8. Semua pihak yang tidak dapat disebutkan satu persatu yang telah terlibat
dalam proses penulisan skripsi ini.
Penulis menyadari bahwa masih ada kekurangan dalam penulisan skripsi ini.
Oleh karena itu, penulis mengharapkan kritik dan saran demi penyempurnaan
skripsi ini. Akhirnya, penulis berharap semoga skripsi ini dapat bermanfaat bagi
para pembaca.
Yogyakarta, 7 Mei 2013
DAFTAR ISI
Halaman
HALAMAN JUDUL……….. i
HALAMAN PERSETUJUAN PEMBIMBING………. ii
HALAMAN PENGESAHAN……… iii
HALAMAN PERSEMBAHAN………. iv
PERNYATAAN KEASLIAN KARYA………. v
ABSTRAK……….. vi
ABSTRACT……… vii
KATA PENGANTAR……… viii
PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH……… x
DAFTAR ISI……… xi
DAFTAR TABEL……… xiv
DAFTAR GAMBAR……….. xviii
DAFTAR LAMPIRAN……… xx
BAB I PENDAHULUAN……… 1
A. Latar Belakang Masalah………. 1
B. Rumusan Masalah……… 6
C. Batasan Masalah………. 6
D. Tujuan Penulisan………. 7
E. Manfaat Penulisan……… 7
G. Sistematika Penulisan………. 7
BAB II MODEL PERAMALAN DATA RUNTUN WAKTU……….. 10
A. Peramalan……… 10
B. Data Runtun Waktu………. 11
C. Autocorrelation Function (ACF)………... 12
D. Partial Autocorrelation Function (PACF)……….. 14
E. Cross Correlation Function (CCF)………. 16
F. Proses White Noise……….. 17
G. Hubungan ACF, PACF, dan CCF dengan White Noise……….. 18
H. Cara Mendeteksi dan Mengatasi Masalah Stasioneritas………. 23
I. Autoregressive Integrated Moving Average (ARIMA)……….. 29
J. Langkah-langkah Pemodelan ARIMA……… 42
K. Deret Geometri Tak Berhingga……… 47
L. Distribusi Chi Kuadrat……… 48
M. Metode Levenberg-Marquardt……… 49
BAB III MODEL FUNGSI TRANSFER……… 56
A. Pengantar Model Fungsi Transfer……… 56
B. Model Fungsi Transfer……… 57
C. Pembentukan Model Fungsi Transfer……….. 62
1. Identifikasi Bentuk Model………. 62
2. Pendugaan Parameter Model Fungsi Transfer……… 69
3. Pemeriksaan Diagnostik Model Fungsi Transfer……… 74
BAB IV PENERAPAN MODEL FUNGSI TRANSFER……….. 77
A. Data dan Sumber Data……… 77
B. Analisis Data……… 78
1. Identifikasi Model Fungsi Transfer……… 79
2. Pendugaan Parameter Model Fungsi Transfer……… 104
BAB V PENUTUP………. 130
A. Kesimpulan………. 130
B. Saran……… 132
DAFTAR TABEL
Halaman
Tabel 2.1 Transformasi Box-Cox……… 29
Tabel 2.2 Contoh Data………. 51
Tabel 2.3 Iterasi Contoh Penerapan Levenberg-Marquardt………. 54
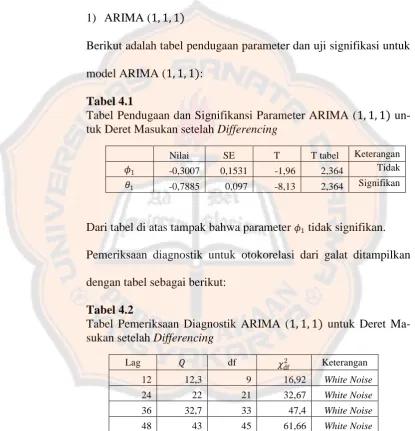
Tabel 4.1 Tabel Pendugaan dan Signifikansi Parameter ARIMA
(1, 1, 1) untuk Deret Masukan setelah Differencing………… 85
Tabel 4.2 Tabel Pemeriksaan Diagnostik ARIMA (1, 1, 1) untuk Deret
Masukan setelah Differencing……….……… 85
Tabel 4.3 Tabel Pendugaan dan Signifikansi Parameter ARIMA
(2, 1, 1) untuk Deret Masukan setelah Differencing………… 86
Tabel 4.4 Tabel Pemeriksaan Diagnostik ARIMA (2, 1, 1) untuk Deret
Masukan setelah Differencing………. 86
Tabel 4.5 Tabel Pendugaan dan Signifikansi Parameter ARIMA
(0, 1, 1) untuk Deret Masukan setelah Differencing………… 87
Tabel 4.6 Tabel Pemeriksaan Diagnostik ARIMA (0, 1, 1) untuk Deret
Masukan setelah Differencing………. 87
Tabel 4.7 Tabel Statistik Dasar Deret Masukan dan Keluaran yang
Diputihkan……… 93
Tabel 4.9 Tabel Pendugaan dan Signifikansi Parameter ARIMA
(2, 0, 0) untuk Deret Gangguan……… 99
Tabel 4.10 Tabel Pemeriksaan Diagnostik ARIMA (2, 0, 0) untuk Deret
Gangguan………. 100
Tabel 4.11 Tabel Pendugaan dan Signifikansi Parameter ARIMA
(2, 0, 1) untuk Deret Gangguan……… 100
Tabel 4.12 Tabel Pemeriksaan Diagnostik ARIMA (2, 0, 1) untuk Deret
Gangguan………. 101
Tabel 4.13 Tabel Pendugaan dan Signifikansi Parameter ARIMA
(2, 0, 2) untuk Deret Gangguan……… 101
Tabel 4.14 Tabel Pemeriksaan Diagnostik ARIMA (2, 0, 2) untuk Deret
Gangguan………. 102
Tabel 4.15 Tabel Pendugaan dan Signifikansi Parameter ARIMA
(2, 0, 3) untuk Deret Gangguan……… 102
Tabel 4.16 Tabel Pemeriksaan Diagnostik ARIMA (2, 0, 3) untuk Deret
Gangguan………. 103
Tabel 4.17 Tabel Nilai Awal Pendugaan Parameter untuk �1,�2,�1,�2,
dan �3……….. 105
Tabel 4.18 Tabel Nilai Awal Pendugaan Parameter untuk �1,�0, dan
Tabel 4.19 Tabel Pendugaan dan Signifikansi Parameter Model 1
dengan , ,� = (1,1,2)……… 112
Tabel 4.20 Tabel Pendugaan dan Signifikansi Parameter Model 2
dengan , ,� = (1,2,2)……… 112
Tabel 4.21 Tabel Pendugaan dan Signifikansi Parameter Model 3
dengan , ,� = (1,3,2)……… 113
Tabel 4.22 Tabel Pendugaan dan Signifikansi Parameter Model 4
dengan , ,� = 1,4,2 ……… 114
Tabel 4.23 Tabel Pendugaan dan Signifikasi Parameter Model 5
dengan , ,� = (1,5,2)……… 115
Tabel 4.24 Tabel Pendugaan dan Signifikansi Parameter Model 6
dengan , ,� = (2,1,2)……… 116
Tabel 4.25 Tabel Pendugaan dan Signifikansi Parameter Model 7
dengan , ,� = (2,2,2)……… 117
Tabel 4.26 Tabel Pendugaan dan Signifikansi Parameter Model 8
dengan , ,� = (2,3,2)……… 118
Tabel 4.27 Tabel Pendugaan dan Signifikansi Parameter Model 9
dengan , ,� = (2,4,2)……… 119
Tabel 4.28 Tabel Pendugaan dan Signifikansi Parameter Model 10
Tabel 4.29 Tabel Pemeriksaan Diagnostik Analisis Galat untuk
Korelasi Silang………. 121
Tabel 4.30 Tabel Pemeriksaan Diagnostik Analisis Galat untuk
DAFTAR GAMBAR
Halaman
Gambar 2.1 Grafik ACF yang White Noise………. 19
Gambar 2.2 Grafik PACF yang White Noise……… 19
Gambar 2.3 Grafik CCF yang White Noise………. 20
Gambar 2.4 Plot Data Runtun Waktu dan Grafik ACF yang Stasioner dalam Rata-rata……… 24
Gambar 2.5 Plot Data Runtun Waktu dan Grafik ACF yang Tidak Stasioner dalam Rata-rata……… 25
Gambar 2.6 Plot Data Runtun Waktu dan Grafik ACF yang Stasioner dalam Varians………. 27
Gambar 2.7 Plot Data Runtun Waktu dan Grafik ACF yang Tidak Stasioner dalam Varians……….. 28
Gambar 2.8 Grafik ACF dan PACF Model AR(1)……….. 31
Gambar 2.9 Grafik ACF dan PACF Model AR(2)……….. 33
Gambar 2.10 Grafik ACF dan PACF Model MA(1)………. 36
Gambar 2.11 Grafik ACF dan PACF Model MA(2)………. 38
Gambar 2.12 Grafik ACF dan PACF Model ARMA(1, 1)……… 40
Gambar 2.13 Scatter Plot Data dan Persamaan Regresinya……….. 55
Gambar 4.2 Plot Deret Masukan dan Deret Keluaran terhadap Waktu….. 79
Gambar 4.3 Plot Data Masukan……….. 80
Gambar 4.4 Grafik ACF Deret Masukan………. 80
Gambar 4.5 Plot Data Masukan setelah Differencing………. 81
Gambar 4.6 Grafik ACF Deret Masukan setelah Differencing……… 82
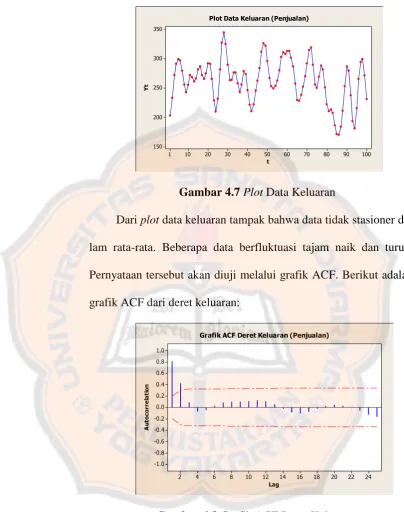
Gambar 4.7 Plot Data Keluaran……….. 83
Gambar 4.8 Grafik ACF Deret Keluaran………. 83
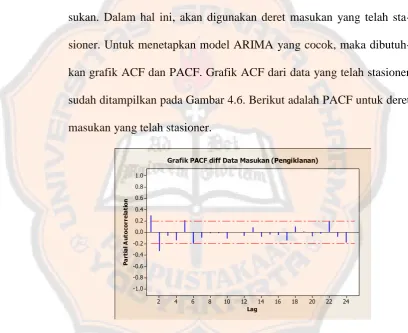
Gambar 4.9 Grafik PACF Data Masukan setelah Differencing………….. 84
Gambar 4.10 Grafik CCF Deret Masukan dan Deret Keluaran………. 90
Gambar 4.11 Grafik ACF Deret Masukan yang Diputihkan………. 91
Gambar 4.12 Grafik ACF Deret Keluaran yang Diputihkan………. 92
Gambar 4.13 Plot Deret Gangguan……… 97
Gambar 4.14 Grafik ACF Deret Gangguan……… 98
Gambar 4.15 Grafik PACF Deret Gangguan………. 98
DAFTAR LAMPIRAN
Lampiran 1 Tabel Hubungan Pengiriman Surat dengan Pengantaran Surat di Kantor Pos
Lampiran 2 Pengeluaran untuk Besarnya Biaya Iklan (dalam $1000) dan Total Penjualan (dalam 1000 kasus) Selama Periode 100 Bulan
Lampiran 3 Hasil Transformasi Differencing Pertama Deret Masukan (Biaya Iklan) dan Deret Keluaran (Penjualan)
Lampiran 4 Deret Masukan (Biaya Iklan) dan Deret Keluaran (Penjualan) yang Telah Diputihkan
Lampiran 5 Nilai Korelasi Silang Antara Deret Masukan (Biaya Iklan) dengan Deret Keluaran (Penjualan)
Lampiran 6 Nilai Otokorelasi Deret Masukan (Biaya Iklan) dan Deret Keluaran (Penjualan)
Lampiran 7 Data Pendugaan Deret Gangguan
Lampiran 8 Tabel Iterasi Pendugaan Parameter Model Fungsi Transfer
BAB I
PENDAHULUAN
A. Latar Belakang Masalah
Peramalan adalah suatu cara untuk memprediksi keadaan yang akan
terjadi di masa mendatang. Analisis runtun waktu merupakan salah satu
metode peramalan yang didasarkan pada data kuantitatif masa lalu.
Analisis runtun waktu pada dasarnya digunakan untuk melakukan analisis
data yang mempertimbangkan pengaruh waktu, dan tidak hanya dapat
di-lakukan untuk satu variabel saja tapi juga dapat didi-lakukan untuk banyak
variabel.
ARIMA (Autoregressive Integrated Moving Average) merupakan
model yang digunakan untuk peramalan analisis runtun waktu tunggal.
Contohnya, jika kita akan meramalkan curah hujan di masa mendatang,
kita hanya menggunakan data curah hujan saja untuk meramalkannya.
Data curah hujan tersebut berperan sebagai masukan sekaligus keluaran.
Sementara untuk data berganda tidak dapat dilakukan analisis
mengguna-kan model ARIMA. Kenyataannya, ada banyak kejadian yang dipengaruhi
oleh lebih dari satu faktor. Jadi untuk meramalkannya juga harus
dipertim-bangkan faktor-faktor yang mempengaruhi. Contohnya untuk meramalkan
curah hujan, perlu dipertimbangkan banyak faktor, seperti kelembaban
model-model yang lain untuk menyelesaikan masalah peramalan dengan
data berganda.
Ada beberapa model yang dapat digunakan untuk menyelesaikan
masalah peramalan dengan data berganda. Salah satu di antaranya adalah
model regresi. Bentuk umum dari model regresi adalah:
= �0+�1 1, +�2 2, +⋯+ � , + (1-1)
= 1,2,⋯,
dengan
: pengamatan ke- dari variabel keluaran
, : pengamatan ke- dari variabel masukan
ke-� : koefisien regresi ( = 0,1,⋯, )
: galat pengamatan ke-
: banyaknya variabel masukan
: banyaknya pengamatan
Selain model regresi terdapat pula model sistem linear. Bentuk umum dari
model sistem linear untuk masukan tunggal adalah sebagai berikut:
= �0 +�1 −1+�2 −2+⋯+
= � � +
: variabel keluaran saat
: variabel masukan saat
: galat saat
Kesulitan dalam pendugaan parameter model ini adalah � � memuat
sejumlah tak hingga koefisien dan mempunyai derajat yang tinggi. Artinya
terdapat sejumlah tak hingga parameter yang harus diduga. Simbol �
adalah notasi untuk operator backshift yang artinya adalah sebagai berikut:
� = −1
Notasi � yang dipasangkan pada mempunyai pengaruh menggeser data
satu periode ke belakang, dua penerapan � untuk mempunyai pengaruh
menggeser data tersebut dua periode ke belakang, yaitu:
� � =�2 = −2
dan secara umum
� = −
Timbul suatu masalah lagi ketika kita menggunakan data berganda,
yaitu parameter yang muncul pada model akan lebih banyak dibanding
dengan data tunggal. Apabila ada banyak parameter, maka akan kesulitan
dalam tahap pendugaan parameter. Oleh sebab itu, diperlukan model yang
berganda tetapi model tersebut juga harus dapat menyelesaikan masalah
munculnya banyak parameter dalam data berganda.
Model fungsi transfer merupakan salah satu model peramalan yang
dapat digunakan untuk peramalan data runtun waktu berganda. Model
fungsi transfer adalah suatu model yang menggambarkan bahwa nilai
pre-diksi masa depan dari suatu runtun waktu (disebut deret keluaran) adalah
berdasarkan pada nilai-nilai masa lalu runtun waktu itu sendiri dan
berdasarkan pula pada satu atau lebih runtun waktu (disebut deret
masukan) yang berhubungan dengan deret keluaran tersebut. Selain itu,
model fungsi transfer adalah model dengan jumlah parameter yang sedikit.
Contoh model fungsi transfer untuk meramalkan curah hujan dengan
mempertimbangkan kecepatan angin sebagai faktor yang
mempeng-aruhinya adalah sebagai berikut:
= 0,978 −2−0,206 −4−0,889 + 0,274 −2−0,486 −3+
0,15 −5 (1-2)
Artinya, untuk meramalkan curah hujan pada saat dibutuhkan informasi
mengenai curah hujan itu sendiri pada saat −2 dan −4, serta
kecepatan angin pada saat , −2, −3, dan −5.
Bentuk dari model fungsi transfer untuk masukan tunggal adalah:
=�(�)
�(�) −� +
(1-3)
� � =�0− �1� − �2�2− ⋯ − � � �0,�1,�2,⋯,� adalah parameter model.
�(�) −� = (�0− �1� − �2�2− ⋯ − � � ) −�
= �0 −� − �1 −�� − �2 −��2− ⋯ − �
−��
= �0 −� − �1 −�−1− �2 −�−2− ⋯ − � −�−
�(�) adalah polinomial berderajat dengan � sebagai variabel.
� � = 1− �1� − �2�2− ⋯ − � � �1,�2,⋯,� adalah parameter model.
Bentuk dari model fungsi transfer juga dapat ditulis
=�(�) �(�)�
� +
(1-4) Bandingkan dengan bentuk umum model sistem linear
�(�)��
�(�) = �(�)
(1-5) Dari persamaan di atas tampak bahwa �(�) yang merupakan polinomial
berderajat tinggi dapat ditulis sebagai perbandingan antara dua polinomial
berderajat dan . Disarankan bahwa nilai dan tidak lebih besar dari
dua (Box, 1994: 385). Jadi model sistem linear dengan jumlah parameter
yang banyak dapat disajikan dengan model fungsi transfer dengan jumlah
parameter yang lebih sedikit dan bentuk umum persamaan model fungsi
transfer masukan tunggal dapat ditulis menjadi
= �(�) + (1-6)
1. Fungsi transfer dan teori yang mendasarinya
2. Tahapan membangun model fungsi transfer
3. Aplikasi fungsi transfer dalam peramalan.
B. Rumusan Masalah
Pokok permasalahan yang akan dibahas dalam tulisan ini yaitu:
1. Apa yang dimaksud dengan model fungsi transfer?
2. Bagaimana melakukan peramalan menggunakan model fungsi
transfer?
C. Batasan Masalah
Pembahasan model fungsi transfer dalam tulisan ini hanya dibatasi
pada:
1. Model fungsi transfer untuk masukan tunggal
2. Dasar-dasar dari analisis runtun waktu tidak dibahas secara rinci
karena sudah dibahas dalam kuliah
3. Pembahasan metode Levenberg-Marquardt hanya pada
langkah-langkahnya saja
D. Tujuan Penulisan
Tujuan penulisan ini yaitu untuk memahami model peramalan
dengan fungsi transfer dan melakukan peramalan menggunakan model
fungsi transfer.
E. Manfaat Penulisan
Manfaat dari tulisan ini adalah memperoleh pengetahuan tentang
model fungsi transfer yang digunakan untuk menyelesaikan masalah
peramalan dengan masukan tunggal.
F. Metode Penulisan
Metode yang digunakan penulis adalah metode studi pustaka yaitu
dengan mempelajari buku-buku yang berkaitan dengan model fungsi
transfer untuk peramalan dengan masukan tunggal.
G. Sistematika Penulisan
BAB I PENDAHULUAN
A. Latar Belakang Masalah
B. Rumusan Masalah
C. Batasan Masalah
D. Tujuan Penulisan
E. Manfaat Penulisan
G. Sistematika Penulisan
BAB II MODEL PERAMALAN DATA RUNTUN WAKTU
A. Peramalan
B. Data Runtun Waktu
C. Autocorrelation Function (ACF)
D. Partial Autocorrelation Function (PACF)
E. Cross Correlation Function (CCF)
F. Proses White Noise
G. Hubungan ACF, PACF, dan CCF dengan White Noise
H. Cara Mendeteksi dan Mengatasi Masalah Stasioneritas
I. Autoregressive Integrated Moving Average (ARIMA)
J. Langkah-langkah Pemodelan ARIMA
K. Deret Geometri Tak Berhingga
L. Distribusi Chi Kuadrat
M. Metode Levenberg-Marquardt
BAB III MODEL FUNGSI TRANSFER
A. Pengantar Model Fungsi Transfer
B. Model Fungsi Transfer
BAB IV PENERAPAN MODEL FUNGSI TRANSFER
A. Data dan Sumber Data
B. Analisis Data
C. Interpretasi Hasil
BAB V PENUTUP
A. Kesimpulan
BAB II
MODEL PERAMALAN DATA RUNTUN WAKTU
A. Peramalan
Peramalan adalah penentuan nilai suatu variabel pada masa yang
akan datang menggunakan arah dan pola perkembangan data masa lalu.
Sedangkan ramalan adalah kondisi yang diperkirakan akan terjadi pada
masa yang akan datang. Ramalan dapat diperoleh dengan
bermacam-ma-cam cara yang dikenal dengan metode peramalan.
Metode peramalan dapat diklasifikasikan ke dalam dua kelompok,
yaitu metode kualitatif dan metode kuantitatif. Metode peramalan
kualita-tif lebih mengandalkan intuisi manusia daripada penggunaan data masa
lalu yang dimiliki. Metode peramalan kuantitatif merupakan peramalan
yang didasarkan pada data-data variabel yang bersangkutan di masa lalu.
Metode ini menggunakan analisis statistik. Menurut Makridakis (1999: 8),
peramalan kuantitatif dapat diterapkan bila terdapat tiga kondisi berikut:
1. Tersedia informasi tentang masa lalu
2. Informasi tersebut dapat dikuantitatifkan dalam bentuk data
nu-merik
3. Dapat diasumsikan bahwa beberapa aspek pola masa lalu akan
Terdapat dua jenis model peramalan yang utama, yaitu model regresi
(kausal) dan model runtun waktu (time series). Model kausal
mengasumsikan bahwa faktor yang diramalkan menunjukkan suatu
hu-bungan sebab akibat dengan satu atau lebih variabel bebas. Tujuan dari
model kausal adalah menemukan bentuk hubungan tersebut dan
menggu-nakannya untuk meramalkan nilai mendatang dari variabel tak bebas. Pada
model runtun waktu, pendugaan masa depan dilakukan berdasarkan nilai
masa lalu suatu variabel dan atau kesalahan masa lalu. Tujuan metode
peramalan runtun waktu adalah untuk menemukan pola dalam deret data
masa lalu dan menggunakan pola tersebut untuk meramalkan kondisi di
masa depan.
B. Data Runtun Waktu
Runtun waktu adalah himpunan observasi yang terkumpul atau hasil
observasi yang berurut menurut waktu (Box, dkk, 1994: 21). Sedangkan
data runtun waktu adalah serangkaian nilai-nilai variabel yang disusun
berdasarkan waktu. Data runtun waktu dikatakan stasioner dalam rata-rata
jika rata-ratanya tidak berubah dari waktu ke waktu atau bersifat stabil.
Suatu data runtun waktu dikatakan stasioner dalam varians, jika plot data
runtun waktu tidak memperlihatkan adanya perubahan varians yang berarti
dari waktu ke waktu. Data runtun waktu memiliki suatu pola tertentu. Pola
data pada runtun waktu dapat dibedakan menjadi empat jenis (Makridakis,
1. Pola Horisontal
Pola horisontal terjadi apabila nilai data berfluktuasi di sekitar nilai
rata-rata yang konstan. Deret seperti ini adalah deret yang stasioner
terhadap rata-rata.
2. Pola Musiman
Pola musiman terjadi apabila suatu deret dipengaruhi oleh faktor
mu-siman. Misalnya kuartal tahun tertentu, bulanan, harian, atau gerakan
periodik yang berulang.
3. Pola Siklis
Pola siklis terjadi apabila data dipengaruhi oleh fluktuasi ekonomi
jangka panjang seperti yang berhubungan dengan siklus bisnis.
4. Pola Trend
Pola trend terjadi apabila terdapat kenaikan atau penurunan jangka
panjang dalam data runtun waktu.
Data sebuah runtun waktu mempunyai suatu pola tertentu, oleh
karena itu perlu dilakukan identifikasi terlebih dahulu untuk mengetahui
pola apa yang ada pada runtun waktu tersebut. Metode yang paling
sederhana untuk mengidentifikasinya adalah dengan melihat pola yang ada
pada plot time series.
C. Autocorrelation Function (ACF)
Statistik kunci di dalam analisis runtun waktu adalah koefisien
dengan runtun waktu itu sendiri dengan selisih waktu (lag) 0, 1, 2 periode
atau lebih.
Definisi 2.1 Otokovarian
Untuk suatu proses stasioner { �}, dengan � = dan Var � = ( �− )2 =�2, fungsi otokovarian antara pengamatan � dan �+ didefinisikan sebagai berikut:
= Cov �, �+ = � − ( �+ − ) (2-1) Definisi 2.2 Korelasi
Korelasi antara � dan �+ adalah sebagai berikut:
� = Cov( �, �+ ) Var( �) Var( �+ )
=
0
(2-2) di mana Var( �) = Var �+ = 0, adalah fungsi otokovarian dan �
adalah fungsi otokorelasi.
Penduga koefisien korelasi sederhana antara � dengan �−1 dapat
dicari dengan menggunakan rumus berikut (Makridakis, dkk, 1999: 338):
� �−1 =
kovarian antara � dan �−1
standar deviasi � × (standar deviasi �−1)
= �=2 �− � ( �−1− �−1)
�=1 � − � 2 �=2( �−1− �−1)2
Data � diasumsikan stasioner, baik dalam rata-rata maupun variansi. Jadi,
nilai rata-rata � dan �−1 dapat diasumsikan sama, sehingga diperoleh
� = �−1 = . Nilai standar deviasi dapat diukur satu kali saja yaitu
asumsi-asumsi tersebut, maka persamaan di atas dapat disederhanakan
menjadi:
� �−1 =
�=2 �− ( �−1− ) ( � − )2
�=1
(2-3) Jadi dari persamaan (2-3), otokorelasi untuk time lag 1, 2, 3,…, dapat di-cari dengan rumus sebagai berikut:
= � − �+ −
− �=1
�=1 � − 2
(2-4) dengan
: koefisien otokorelasi sampel
� : nilai variabel pada saat �
�+ : nilai variabel pada saat �+
: nilai rata-rata variabel
D. Partial Autocorrelation Function (PACF)
Koefisien otokorelasi parsial adalah koefisien yang digunakan untuk
mengukur tingkat keeratan hubungan antara variabel � dan �+ setelah
hubungan linear dengan variabel �+1, �+2,…, �+ dianggap konstan. Fungsi otokorelasi parsial dapat dinyatakan sebagai berikut (Wei, 1990:
12):
Definisi 2.3 Otokorelasi Parsial
Otokorelasi parsial dapat diperoleh melalui model regresi, misalkan
� adalah suatu proses stasioner dengan rata-rata nol, maka �+ dapat
ditulis menjadi:
�+ = � 1 �+ −1+� 2 �+ −2+ +� �+��+ (2-6)
dengan � adalah parameter ke dari persamaan regresi, dan ��+ adalah
komponen kesalahan yang tidak berkorelasi dengan �+ − untuk 1. Pada persamaan (2-6) di atas, kedua ruas kalikan dengan �+ − , sehingga
diperoleh persamaan sebagai berikut:
�+ �+ − =� 1 �+ −1 �+ − +� 2 �+ −2 �+ − + +� � �+ − +��+ �+ −
Persamaan di atas diambil nilai harapannya di kedua ruasnya sehingga
di-peroleh:
=� 1 −1+� 2 −2+ +� − (2-7)
Persamaan di atas dibagi dengan 0, sehingga persamaan (2-7) berubah
menjadi:
� =� 1� −1+� 2� −2+ +� � − (2-8)
Untuk = 1,2,…, diperoleh sistem persamaan seperti berikut:
�1 = � 1�0+� 2�1+ +� � −1
�2 = � 1�1 +� 2�0+ +� � −2
� = � 1� −1+� 2� −2+ +� �0
Menggunakan aturan Cramer, untuk = 1,2,… diperoleh:
�22 =
� inilah yang disebut sebagai fungsi otokorelasi parsial.
E. Cross Correlation Function (CCF)
Fungsi korelasi silang adalah ukuran kekuatan hubungan antara dua
variabel. Korelasi silang dan menentukan tingkat hubungan antara
nilai pada waktu � dengan nilai pada waktu �+ (Makridakis, dkk, 1999: 456).
Definisi 2.4 Kovarian Silang
Diberikan dua variabel � dan �, fungsi kovarian silang antara �
dan � dapat dinyatakan dengan persamaan sebagai berikut:
Persamaan (2-9) fungsi kovarian silang didefinisikan sebagai nilai
harapan. Dalam praktek, taksiran kovarian silang dihitung dengan rumus
sebagai berikut:
= 1 �=1− �− ( �+ − ) (2-10)
Definisi 2.5 Korelasi Silang
Rumus penduga korelasi silang dari � dan � dapat diperoleh
de-ngan membagi fungsi kovarian silang pada persamaan (2-10) dede-ngan
standar deviasi dari � dan �.
= ( )
(2-11) dengan
: fungsi korelasi silang sampel dari � dan �
: fungsi kovarian silang sampel dari � dan �
: standar deviasi sampel dari �
: standar deviasi sampel dari �
: beda waktu pada setiap pasangan data (time lag)
F. Proses White Noise
Suatu data runtun waktu dikatakan mengalami proses white noise
jika otokorelasi antara deret � dan �− untuk semua lag mendekati nol,
atau nilai antar lag pada deret tersebut tidak berkorelasi satu dengan yang
lain. Menurut Wei (1990: 16) suatu proses � disebut suatu proses white
dari suatu distribusi dengan rata-rata konstan � = 0 yang biasa
diasumsikan nol, variansi konstan Var � =�2 dan = Cov �, �+ = 0 untuk semua ≠0.
Definisi 2.6 Proses White Noise
Suatu proses white noise � adalah stasioner bila memenuhi fungsi
otokovarian:
= �2 , = 0
0 , ≠ 0 (2-12) fungsi otokorelasi:
� = 1 , = 0
0 , ≠0 (2-13) dan fungsi otokorelasi parsial:
� = 1 , = 0
0 , ≠0 (2-14)
G. Hubungan ACF, PACF, dan CCF dengan White Noise
Suatu runtun waktu dikatakan white noise apabila tidak ada korelasi
antar lag pada deret tersebut. Definisi ini secara matematis dituliskan pada
persamaan (2-12), (2-13), dan (2-14). Apabila fungsi otokorelasi
didefinisikan seperti pada persamaan (2-13), maka persamaan itu
menyebabkan semua koefisien otokorelasi harus mendekati nol, yang
33
ACF of Residuals for Xt
(with 5% significance limits for the autocorrelations)
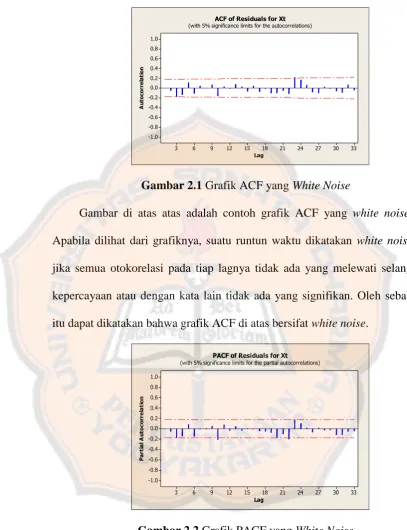
Gambar 2.1 Grafik ACF yang White Noise
Gambar di atas atas adalah contoh grafik ACF yang white noise.
Apabila dilihat dari grafiknya, suatu runtun waktu dikatakan white noise
jika semua otokorelasi pada tiap lagnya tidak ada yang melewati selang
kepercayaan atau dengan kata lain tidak ada yang signifikan. Oleh sebab
itu dapat dikatakan bahwa grafik ACF di atas bersifat white noise.
33
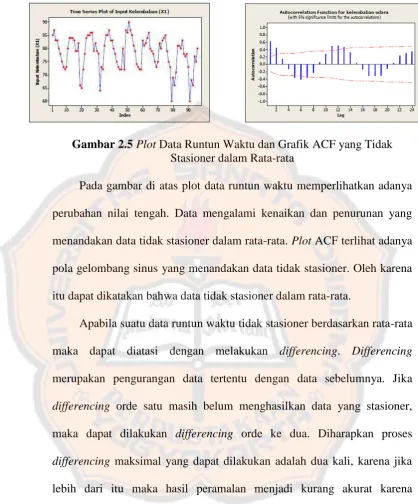
PACF of Residuals for Xt
(with 5% significance limits for the partial autocorrelations)
Gambar 2.2 Grafik PACF yang White Noise
Persamaan (2-14) berakibat bahwa untuk semua koefisien
otokorelasi parsial juga harus mendekati nol. Artinya, grafik PACF juga
yang bersifat white noise. Hal ini terlihat dari tidak adanya otokorelasi
parsial yang melewati selang kepercayaan untuk setiap lag.
Persamaan korelasi silang didapatkan dari rumus fungsi kovarian.
Proses white noise juga memuat bahwa fungsi otokovarian harus
mendekati nol. Ini artinya, koefisien korelasi silang juga diharapkan
mendekati nol. Dengan kata lain grafik CCF juga harus bersifat white
noise. Berikut adalah contoh gambar grafik CCF yang bersifat white noise.
Gambar 2.3 Grafik CCF yang White Noise
Secara grafik, dapat dilihat langsung apabila tidak ada lag dengan
CCF yang signifikan atau melewati selang kepercayaan, itu berarti runtun
waktu bersifat white noise. Grafik-grafik tersebut merupakan cara untuk
menguji signifikasi dari koefisien-koefisien otokorelasi, otokorelasi
parsial, dan korelasi silang. Prosedur pengujian hipotesis yang
menghasilkan grafik-grafik tersebut adalah sebagai berikut:
1. Pengujian Hipotesis untuk Koefisien Otokorelasi
Hipotesis yang akan diuji adalah sebagai berikut:
�1: � ≠0 (koefisien otokorelasi signifikan)
Statistik uji yang digunakan adalah:
� =
( )
= 1 + 2
2
−1 =1
dengan
: kesalahan standar untuk otokorelasi pada lag ke
: koefisien otokorelasi pada lag ke
: selisih waktu
: banyaknya observasi dalam runtun waktu
Kriteria keputusannya adalah �0 ditolak jika
�< −�
2, −1
atau �> �
2, −1
atau secara grafik apabila koefisien
otokorelasi melewati batas-batas selang kepercayaan.
2. Pengujian Hipotesis untuk Koefisien Otokorelasi Parsial
Hipotesis yang akan diuji adalah sebagai berikut:
�0: � = 0 (koefisien otokorelasi parsial tidak signifikan)
�1: � ≠0 (koefisien otokorelasi parsial signifikan)
Statistik uji yang digunakan adalah:
� = � (� )
dengan
� : kesalahan standar untuk otokorelasi parsial pada lag ke
� : koefisien otokorelasi parsial pada lag ke
: selisih waktu
: banyaknya observasi dalam runtun waktu
Kriteria keputusannya adalah �0 ditolak jika
�< −�
2, −1
atau �> �
2, −1
atau secara grafik apabila koefisien
otokorelasi parsial melewati batas-batas selang kepercayaan.
3. Pengujian Hipotesis untuk Koefisien Korelasi Silang
Hipotesis yang akan diuji adalah sebagai berikut:
�0: � = 0 (koefisien korelasi silang tidak signifikan)
�1: � ≠0 (koefisien korelasi silang signifikan)
Statistik uji yang digunakan adalah:
�=
( )
= 1
−
dengan
: kesalahan standar untuk korelasi silang
: koefisien korelasi silang sampel
: selisih waktu
Kriteria keputusannya adalah �0 ditolak jika
�< −�
2, −1
atau � >�
2, −1
.
Asas suatu runtun waktu bersifat white noise maka hasil pengujian
hipotesis yang diharapkan adalah �0 diterima. Artinya, baik koefisien
otokorelasi, otokorelasi parsial, maupun korelasi silang harus mendekati
nol. Dengan kata lain, seluruh koefisien otokorelasi, otokorelasi parsial,
dan korelasi silang harus tidak signifikan.
H. Cara Mendeteksi dan Mengatasi Masalah Stasioneritas
Dalam analisis runtun waktu, asumsi yang harus dipenuhi adalah
stasioneritas data baik dalam rata-rata maupun varians. Data dikatakan
stasioner jika rata-rata dan variansnya konstan. Menurut Makridakis, dkk
(1999: 351) stasioneritas mempunyai makna bahwa tidak terdapat
pertumbuhan atau penurunan pada data. Dengan kata lain, fluktuasi data
berada di sekitar suatu nilai rata-rata yang konstan, tidak tergantung pada
waktu dan varians dari fluktuasi tersebut.
Kebanyakan data dalam analisis runtun waktu tidak stasioner, oleh
karena itu perlu dilakukan pengujian mengenai stasioneritas data.
Pengujian ini dapat dilakukan dengan mengamati plot data runtun waktu
dan plot otokorelasi. Jika plot data runtun waktu cenderung konstan, tidak
terdapat trend naik atau turun maka dapat disimpulkan data sudah
stasioner. Nilai-nilai otokorelasi dari data stasioner akan turun sampai nol
stasioner, nilai-nilai tersebut berbeda signifikan dari nol untuk beberapa
periode waktu.
Data runtun waktu dikatakan stasioner dalam rata jika
rata-ratanya tidak berubah dari waktu ke waktu atau bersifat stabil. Untuk
melihat kestasioneran dalam rata-rata dapat digunakan alat bantu plot data
runtun waktu dan plot otokorelasi (ACF). Gambar 2.4 berikut
menunjukkan contoh data runtun waktu yang stasioner dalam rata-rata dan
gambar 2.5 menunjukkan contoh data runtun waktu yang tidak stasioner
Time Series Plot of diff
50
Gambar 2.4 Plot Data Runtun Waktu dan Grafik ACF yang Stasioner dalam Rata-rata
Plot data runtun waktu pada gambar di atas memperlihatkan tidak
adanya perubahan dalam rata-rata. Walaupun ada beberapa nilai yang
menyimpang jauh akan tetapi bila ditarik garis tengahnya, rata-rata
nilainya berada di sekitar garis tersebut. Selain itu plot ACF juga
memperkuat adanya kestasioneran data dalam rata-rata. Hal itu dapat
dilihat untuk semua lag nilai otokorelasi turun mendekati nol. Oleh karena
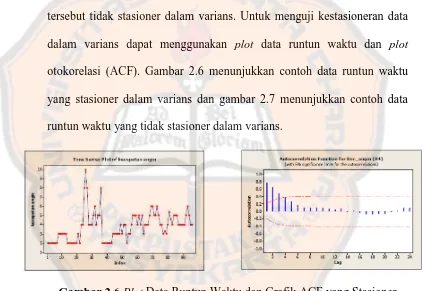
Gambar 2.5 Plot Data Runtun Waktu dan Grafik ACF yang Tidak Stasioner dalam Rata-rata
Pada gambar di atas plot data runtun waktu memperlihatkan adanya
perubahan nilai tengah. Data mengalami kenaikan dan penurunan yang
menandakan data tidak stasioner dalam rata-rata. Plot ACF terlihat adanya
pola gelombang sinus yang menandakan data tidak stasioner. Oleh karena
itu dapat dikatakan bahwa data tidak stasioner dalam rata-rata.
Apabila suatu data runtun waktu tidak stasioner berdasarkan rata-rata
maka dapat diatasi dengan melakukan differencing. Differencing
merupakan pengurangan data tertentu dengan data sebelumnya. Jika
differencing orde satu masih belum menghasilkan data yang stasioner,
maka dapat dilakukan differencing orde ke dua. Diharapkan proses
differencing maksimal yang dapat dilakukan adalah dua kali, karena jika
lebih dari itu maka hasil peramalan menjadi kurang akurat karena
menggunakan data yang sudah terlalu lama.
Notasi yang sangat bermanfaat dalam differencing adalah operator
backshift (backward shift) yang disimbolkan dengan yang artinya adalah
sebagai berikut:
Notasi yang dipasangkan pada � mempunyai pengaruh menggeser data
satu periode ke belakang, dua penerapan untuk � mempunyai pengaruh
menggeser data tersebut dua periode ke belakang, yaitu:
� = 2 � = �−2 (2-16)
Apabila suatu runtun waktu tidak stasioner, maka data tersebut dapat
dibuat lebih mendekati stasioner dengan melakukan differencing pertama
dari deret data dan persamaannya adalah sebagai berikut:
�′ = � − �−1 (2-17)
Menggunakan operator backshift persamaan di atas dapat ditulis kembali
menjadi:
�′ = � − � = (1− ) � (2-18)
Differencing pertama dinyatakan dengan (1− ). Sama halnya apabila
differencing orde kedua, yaitu differencing pertama dari differencing
pertama sebelumnya, dan cara penghitungannya adalah sebagai berikut:
�′′ = �′ − �−′ 1
= ( �− �−1)−( �−1− �−2)
= � −2 �−1+ �−2
= (1−2 + 2) � = (1− )2 �
Differencing orde kedua diberi notasi (1− )2. Tujuan dilakukannya
Definisi 2.7 Differencing
Differencing orde ke- pada � adalah:
� = (1− ) � (2-19)
Suatu data runtun waktu dikatakan stasioner dalam varians, jika plot
data runtun waktu tidak memperlihatkan adanya perubahan varians yang
signifikan dari waktu ke waktu (Makridakis, 1999:333). Sebaliknya jika
grafik data runtun waktu menunjukkan variasi yang fluktuatif maka data
tersebut tidak stasioner dalam varians. Untuk menguji kestasioneran data
dalam varians dapat menggunakan plot data runtun waktu dan plot
otokorelasi (ACF). Gambar 2.6 menunjukkan contoh data runtun waktu
yang stasioner dalam varians dan gambar 2.7 menunjukkan contoh data
runtun waktu yang tidak stasioner dalam varians.
Gambar 2.6 Plot Data Runtun Waktu dan Grafik ACF yang Stasioner dalam Varians
Pada gambar 2.6 plot data runtun waktu memperlihatkan bahwa data
stasioner dalam varians. Hal itu dikarenakan tidak terlihat adanya
perubahan varians yang signifikan. Pernyataan ini diperkuat juga dengan
ketiga dan semakin mendekati nol. Oleh sebab itu, dapat dikatakan data
stasioner dalam varians.
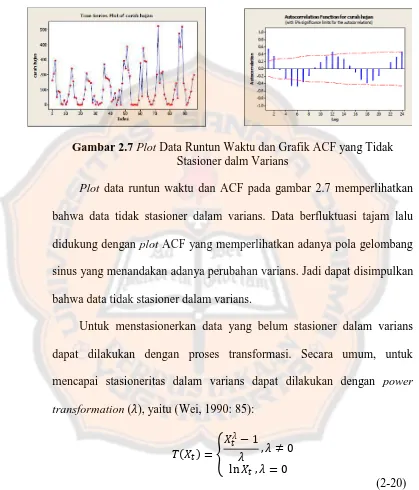
Gambar 2.7 Plot Data Runtun Waktu dan Grafik ACF yang Tidak Stasioner dalm Varians
Plot data runtun waktu dan ACF pada gambar 2.7 memperlihatkan
bahwa data tidak stasioner dalam varians. Data berfluktuasi tajam lalu
didukung dengan plot ACF yang memperlihatkan adanya pola gelombang
sinus yang menandakan adanya perubahan varians. Jadi dapat disimpulkan
bahwa data tidak stasioner dalam varians.
Untuk menstasionerkan data yang belum stasioner dalam varians
dapat dilakukan dengan proses transformasi. Secara umum, untuk
mencapai stasioneritas dalam varians dapat dilakukan dengan power
transformation ( ), yaitu (Wei, 1990: 85):
� =
� −1
, ≠0 ln �, = 0
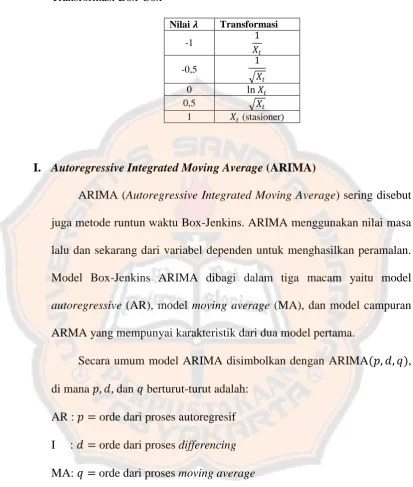
(2-20) dengan adalah parameter transformasi. Secara umum, berikut adalah
nilai dari beserta pendekatan transformasi yang digunakan (Wei, 1990:
Tabel 2.1
Transformasi Box-Cox
Nilai � Transformasi
-1 1
�
-0,5 1
�
0 ln �
0,5 �
1 � (stasioner)
I. Autoregressive Integrated Moving Average (ARIMA)
ARIMA (Autoregressive Integrated Moving Average) sering disebut
juga metode runtun waktu Box-Jenkins. ARIMA menggunakan nilai masa
lalu dan sekarang dari variabel dependen untuk menghasilkan peramalan.
Model Box-Jenkins ARIMA dibagi dalam tiga macam yaitu model
autoregressive (AR), model moving average (MA), dan model campuran
ARMA yang mempunyai karakteristik dari dua model pertama.
Secara umum model ARIMA disimbolkan dengan ARIMA( , , ), di mana , , dan berturut-turut adalah:
AR : = orde dari proses autoregresif I : = orde dari proses differencing MA: = orde dari proses moving average 1. Model Autoregressive (AR)
Autoregressive adalah suatu bentuk persamaan regresi tetapi
bukan yang menghubungkan variabel dependen dengan variabel
independen, melainkan menghubungkan nilai-nilai sebelumnya dengan
yang bermacam-macam. Secara grafik, suatu model AR dikatakan
mengikuti proses AR jika lag-lag pada grafik ACF menurun secara
eksponensial dan banyaknya lag yang signifikan berbeda dengan nol
pada grafik PACF digunakan sebagai indikasi besarnya parameter .
Definisi 2.8 Model Autoregressive (AR)
Bentuk umum model autoregressive berorde , disimbolkan
AR( ) atau ARIMA ( , 0,0) dinyatakan sebagai berikut (Makridakis, 1999: 385):
� = ′ +�1 �−1+�2 �−2+ +� �− + � (2-21)
dengan
′: nilai konstan
� : parameter autoregresif ke-
�: galat pada saat �
Dua kasus yang paling sering muncul adalah untuk = 1 dan = 2, yaitu berturut-turut model AR(1) dan AR(2). Dua kasus tersebut dapat ditulis persamaannya sebagai berikut:
a. AR atau ARIMA , ,
� = ′ +�1 �−1+ � (2-22)
Dengan menggunakan simbol operator backshift, persamaan (2-22)
dapat ditulis kembali menjadi:
� − �1 �−1 = ′ + � (2-23)
atau
Berikut adalah bentuk grafik ACF dan PACF dari model AR(1) (Wei, 1990: 34)
Gambar 2.8 Grafik ACF dan PACF Model AR(1)
Gambar 2.8 menunjukkan pola ACF dan PACF model AR(1). Terlihat pada gambar bahwa ACF turun perlahan mendekati nol
b. AR( ) atau ARIMA( , , )
� = ′ +�1 �−1+�2 �−2+ � (2-25)
Dengan menggunakan simbol operator backshift, persamaan (2-25)
dapat ditulis kembali menjadi:
� − �1 �−1− �2 �−2 = ′ + � (2-26)
atau
1− �1 − �2 2 � = ′ + � (2-27)
Gambar 2.9 menunjukkan pola ACF dan PACF model AR(2). Terlihat pada gambar bahwa ACF turun perlahan mendekati nol
dan PACF signifikan pada lag pertama dan kedua.
2. Model Moving Average (MA)
Moving average atau rata-rata bergerak berarti bahwa nilai
runtun waktu pada waktu � dipengaruhi oleh unsur galat pada saat ini
dan (mungkin) unsur galat pada masa lalu. Suatu runtun waktu
dikatakan mengikuti proses MA, jika lag-lag pada grafik PACF
menurun secara eksponensial dan banyaknya lag yang signifikan
berbeda dengan nol pada grafik ACF digunakan sebagai indikasi
besarnya parameter .
Definisi 2.9 Model Moving Average (MA)
Bentuk umum model moving average orde , disimbolkan
dengan MA( ) atau ARIMA (0,0, ) dapat ditulis sebagai berikut (Makridakis, 1990: 388):
� = + � − �1 �−1− �2 �−2− − � �− (2-28)
dengan
: nilai konstan
� : parameter moving average ke-
Dua kasus yang paling sering muncul adalah untuk = 1 dan = 2, yaitu berturut-turut model MA(1) dan MA(2). Dua kasus tersebut dapat ditulis persamaannya sebagai berikut:
a. MA( ) atau ARIMA( , , )
� = + � − �1 �−1 (2-29)
Dengan menggunakan simbol operator backshift, persamaan (2-29)
dapat ditulis kembali menjadi:
� = + (1− �1 ) � (2-30)
Gambar 2.10 Grafik ACF dan PACF Model MA(1)
Gambar 2.10 menunjukkan pola ACF dan PACF model MA(1). Terlihat pada gambar bahwa ACF signifikan pada lag pertama dan
PACF perlahan mendekati nol.
b. MA( ) atau ARIMA( , , )
� = + � − �1 �−1− �2 �−2 (2-31)
Dengan menggunakan simbol operator backshift, persamaan (2-31)
� = + (1− �1 − �2 2) � (2-32)
Gambar 2.11 menunjukkan pola ACF dan PACF model MA(2). Terlihat pada gambar bahwa ACF signifikan pada lag pertama dan
kedua, sedangkan PACF perlahan mendekati nol.
3. Model Campuran Autoregressive Moving Average (ARMA)
Suatu perluasan yang diperoleh dari model AR dan MA adalah
model campuran ARMA. Bentuk umum untuk model campuran
ARMA ( , ) dapat ditulis sebagai berikut:
� = ′ +�1 �−1+ +� �− + �− �1 �−1− − � �−
� − �1 �−1− − � �− = ′ + �− �1 �−1− − � �−
1− �1 − − � � = ′ + (1− �1 − − � ) � Definisi 2.10 Model Autoregressive Moving Average (ARMA)
Model ARMA dapat ditulis sebagai berikut:
� � = ′ +� ( ) � (2-33)
dengan
� = 1− �1 − − �
� = (1− �1 − − � )
Persamaan untuk kasus yang paling sederhana proses AR(1) dan proses MA(1) adalah sebagai berikut:
ARMA( , ) atau ARIMA( , , )
� = ′ +�1 �−1+ � − �1 �−1 (2-34)
Dengan menggunakan simbol operator backshift, persamaan (2-34)
�− �1 �−1 = ′ + � − �1 �−1 (2-35)
atau
1− �1 � = ′ + (1− �1 ) � (2-36)
Berikut adalah bentuk grafik ACF dan PACF dari model ARMA(1, 1) (Wei, 1990: 60-61)
Gambar 2.12 (lanjutan)
Apabila data tidak stasioner maka perlu dilakukan proses
differencing. Oleh sebab itu proses ARMA akan berubah menjadi model
umum ARIMA( , , ). Jika dilakukan proses differencing dengan orde ke- seperti pada persamaan (2-19), sehingga 1, 2,… menjadi data
Definisi 2.11 Model ARIMA( ,�, )
Bentuk umum model ARIMA( , , ) adalah sebagai berikut:
� 1− � = ′ +� ( ) � (2-37) dengan operator AR( ) dinyatakan dalam bentuk polinomial sebagai berikut:
� = 1− �1 − �2 2− − � (2-38)
dan operator MA( ) adalah sebagai berikut:
� = 1− �1 − �2 2− − � (2-39) Parameter menunjukkan bahwa proses tidak stasioner. Jadi apabila
parameter = 0 maka proses telah stasioner. Namun dalam prakteknya jarang diperlukan pemakaian nilai , , yang lebih dari 2. Persamaan untuk kasus yang paling sederhana ARIMA(1, 1, 1) adalah sebagai berikut:
1− �1 1− � = ′ + (1− �1 ) � (2-40)
J. Langkah-langkah Pemodelan ARIMA
Langkah-langkah membangun suatu model ARIMA dengan metode
Box-Jenkins adalah sebagai berikut:
1. Identifikasi Model
Identifikasi model berkaitan dengan penentuan orde pada ARIMA.
Oleh karena itu, identifikasi model dilakukan setelah melakukan
analisis runtun waktu untuk mengetahui adanya otokorelasi dan
transformasi dan differencing. Jika data tidak stasioner dalam rata-rata
maka dilakukan differencing dan jika data tidak stasioner dalam
varians maka dapat dilakukan suatu transformasi pada data. Langkah
pertama untuk menganalisis data runtun waktu adalah dengan
membuat plot data time series terlebih dahulu. Hal ini bermanfaat
untuk mengetahui adanya trend dan pengaruh musiman pada data
tersebut. Langkah berikutnya adalah menganalisis koefisien
otokorelasi dan otokorelasi parsial dengan tujuan untuk mengetahui
kestasioneran data. Grafik ACF dan PACF tersebut juga digunakan
untuk mengidentifikasi orde model ARIMA.
2. Pendugaan Parameter Model
Menurut Makridakis (1999: 407) terdapat dua cara yang mendasar
untuk melakukan pendugaan parameter, yaitu:
a. Dengan cara mencoba-coba, yaitu menguji beberapa nilai yang
berbeda dan memilih satu nilai tersebut (atau sekumpulan nilai,
apabila terdapat lebih dari satu parameter yang akan diduga) yang
meminimumkan jumlah kuadrat nilai sisa (sum of squared
residuals).
b. Perbaikan secara iteratif, yaitu memilih penduga awal dan
kemudian membiarkan program komputer memperhalus
Setelah dilakukan pendugaan parameter maka parameter tersebut perlu
diuji signifikasinya. Langkah-langkah dalam pengujian signifikansi
adalah sebagi berikut:
a. AR (Autoregressive)
�0: � = 0, di mana = 1, 2,…, (AR tidak signifikan dalam
model)
�1: � ≠0 (AR signifikan dalam model)
Statistik uji yang digunakan adalah sebagai berikut:
�hitung =
�
SE(� )
dengan � adalah estimator dari � , sedangkan SE(� ) adalah standar eror yang diduga dari � .
Kriteria keputusan untuk menolak �0 adalah jika � >�
2,
,
= − , dengan adalah banyaknya pengamatan dan adalah banyaknya parameter. Hasil keputusan yang diharapkan
adalah �0 ditolak, atau AR signifikan dalam model.
b. MA (Moving Average)
�0: � = 0, di mana = 1, 2,…, (MA tidak signifikan dalam
model)
�1: � ≠0 (MA signifikan dalam model)
�hitung =
�
SE(� )
dengan � adalah estimator dari � , sedangkan SE(� ) adalah standar eror yang diduga dari � .
Kriteria keputusan untuk menolak �0 adalah jika � >�
2,
,
= − , dengan adalah banyaknya pengamatan dan adalah banyaknya parameter. Hasil keputusan yang diharapkan
adalah �0 ditolak, atau MA signifikan dalam model.
3. Pemeriksaan Diagnostik pada Model
Tahap pemeriksaan diagnostik bertujuan untuk memeriksa apakah
model penduga sudah sesuai, yaitu model sudah memenuhi syarat
white noise untuk galat (residual). Hal tersebut dapat dilakukan
menggunakan analisis galat untuk otokorelasi. Pengujian auokorelasi
untuk galat menggunakan hipotesis sebagai berikut:
�0: otokorelasi pada deret galat tidak signifikan
�1: otokorelasi pada deret galat tidak signifikan
dengan statistik uji sebagai berikut:
� = 2
=1
dengan
: � −
: derajat pada transformasi differencing
: lag maksimum
: nilai otokorelasi deret galat pada lag
Hasilnya dibandingkan dengan tabel distribusi �2 dengan derajat bebas
− − . dan merupakan derajat untuk proses autoregressive
dan moving average pada model ARIMA. Kriteria pengambilan
keputusannya adalah �0 ditolak jika � �2. Hasil yang diharapkan
adalah �0 diterima, artinya otokorelasi pada deret galat tidak
signifikan. Secara grafik, lag-lag otokorelasi dari galat tidak signifikan
atau mendekati nol. Dengan kata lain otokorelasi dari galat memenuhi
proses white noise. Biasanya dalam pemodelan ARIMA dibentuk lebih
dari satu model, kemudian dilakukan perbandingan untuk mengetahui
model mana yang lebih baik.
4. Kriteria Pemilihan Model
Tahap selanjutnya adalah penentuan kriteria pemilihan model apabila
terdapat dua atau lebih model penduga. Tujuannya adalah untuk
memilih model terbaik yang layak digunakan dalam peramalan. Salah
satu pendekatan yang dapat digunakan dalam pemilihan model yaitu
pendekatan AIC (Akaike’s Information Criterion). Nilai AIC semakin
kecil maka model yang didapatkan semakin baik.
Definisi 2.12 Akaike’s Information Criterion (AIC)
AIC M = ln� 2+ 2M (2-48) dengan
: banyaknya pengamatan
� 2: penduga dari �2
M : banyaknya parameter pada model
Selain memperhatikan nilai AIC, dalam pemilihan model yang terbaik
juga perlu dipertimbangkan besarnya rata-rata kuadrat galat dan
kesederhanaan model. Model akan semakin baik apabila rata-rata
kuadrat galatnya semakin kecil dan model semakin sederhana.
K. Deret Geometri Tak Berhingga
Deret geometri tak berhingga digunakan dalam pembahasan bentuk
model fungsi transfer pada Bab III. Deret geometri tak berhingga adalah
penjumlahan dari 1+ 2+ 3+ , dengan = −1, ≠0
= = + + 2+
∞
=1
(2-49) di mana → ∞ dan −1 < < 1 sehingga →0.
Rumus jumlah deret geometri adalah sebagai berikut:
= (1− ) 1−
(2-50) Dengan menggunakan rumus jumlah deret geometri didapatkan rumus
jumlah deret geometri tak berhingga sebagai berikut:
= 1−
Deret geometri tak berhingga ini akan konvergen untuk −1 < < 1. Rumus deret geometri tak berhingga di atas dapat digunakan untuk
menunjukkan apabila terdapat fungsi transfer yang dinyatakan dalam
bentuk polinomial berderajat tak hingga banyak, dapat diubah menjadi
perbandingan dari dan 1− . Tentu saja bentuk perbandingan ini lebih sederhana dibandingkan dengan bentuk polinomial berderajat tak hingga.
L. Distribusi Chi Kuadrat
Distribusi Chi Kuadrat digunakan dalam pembahasan uji diagnosa
model fungsi transfer pada Bab III.
Definisi 2.13
Variabel random dikatakan berdistribusi Chi Kuadrat jika
mempunyai fungsi densitas seperti berikut:
= 1
Γ(�
2)2
�
2
�
2−1 −2
(2-52) untuk > 0 dan � adalah derajat bebas dan Γ adalah fungsi Gamma. Distribusi ini dinotasikan dengan ~�2(�).
Distribusi ini merupakan bentuk khusus dari distribusi gamma
dengan mengambil =�
2 dan = 2. Jika variabel random berdistribusi
M. Metode Levenberg-Marquardt
Metode Levenberg-Marquardt merupakan metode yang akan
digunakan dalam pembahasan mengenai pendugaan parameter model
fungsi transfer pada Bab III. Metode Levenberg-Marquardt merupakan
salah satu metode iteratif yang digunakan untuk menyelesaikan masalah
kuadrat terkecil nonlinear. Tujuan yang ingin dicapai dalam masalah
kuadrat terkecil nonlinear adalah menentukan solusi bagi � yang
dinotasikan dengan �∗ yang meminimumkan persamaan berikut:
� = � 2
=1
= (�) (�)
(2-53) Langkah awal yang harus dilakukan dalam metode
Levenberg-Marquardt adalah menentukan titik awal. Misalkan ditentukan titik awal
� =� . Setelah menentukan titik awal, langkah selanjutnya adalah menghitung � dan . Untuk menghitung � digunakan rumus sebagai
berikut:
�= � (�) (2-54) sedangkan untuk menghitung digunakan rumus sebagai berikut:
= � (�) (2-55) dengan vektor = ( 1,…, ), dan � adalah matriks Jacobian, yakni:
( � ) = �
� � , 1 , 1
Setelah � dan dihitung, langkah selanjutnya adalah menyelesaikan
persamaan berikut:
merupakan parameter damping dengan > 0 untuk menjamin bahwa adalah arah turun (descent direction) dan adalah matriks identitas.
Persamaan (2-56) di atas diselesaikan dengan tujuan untuk menentukan .
Apabila sudah ditentukan, maka dapat dihitung �baru, yaitu:
�baru = �+ (2-57)
Langkah selanjutnya adalah dengan menghitung � . Dalam
prakteknya � adalah salah satu contoh jumlah kuadrat galat. Artinya,
tujuan metode Levenberg-Marquardt adalah menemukan solusi �
sedemikian sehingga jumlah kuadrat galat menjadi minimal. Untuk
mencapai tujuan tersebut, maka ditentukan nilai � suatu bilangan positif
yang digunakan sebagai kriteria penghentian iterasi. Jika jumlah kuadrat
galat lebih kecil dari �, maka iterasi dihentikan nilai � yang terakhir
merupakan solusi, yaitu �∗ yang meminimumkan jumlah kuadrat galat.
Jika jumlah kuadrat galat lebih besar dari �, maka iterasi akan berulang
dengan �= �baru. Kriteria penghentian lain yang dapat digunakan adalah
jika perubahan dalam � kecil, yakni:
�baru − � � � +� (2-58)
Berikut ini akan diberikan contoh penggunaan metode
Levenberg-Marquardt untuk menyelesaikan masalah kuadrat terkecil nonlinear.
Apabila diberikan fungsi sebagai berikut: