TAMPILAN RUNNING TEXT
TUGAS AKHIR
JEREMIA AGUSANDI GINTING 172408011
PROGRAM STUDI D-3 FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2020
APLIKASI MIKROKONTROLER ATMEGA328 PADA PALANG KERETA API DENGAN SISTEM PERINGATAN DAN
TAMPILAN RUNNING TEXT
TUGAS AKHIR
DIAJUKAN UNTUK MELENGKAPI TUGAS DAN MEMENUHI SYARAT MEMPEROLEH GELAR AHLI MADYA
JEREMIA AGUSANDI GINTING 172408011
PROGRAM STUDI D-3 FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2020
APLIKASI MIKROKONTROLER ATMEGA328 PADA PALANG KERETA API DENGAN SISTEM PERINGATAN DAN
TAMPILAN RUNNING TEXT
ABSTRAK
Palang kereta api otomatis merupakan suatu otomatisasi yang diterapkan pada jalur transportasi Kereta Api guna menutup dan membuka jalan yang membatasi atau menghentikan jalur lalu lintas agar kendaraan berhenti sementara untuk mendahulukan kereta api yang akan lewat. Aplikasi ini hanyalah sebuah prototype kecil yang menggambarkan sebuah aplikasi untuk palang kereta api yang dapat bergerak secara otomatis, dibandingkan penerapan sesungguhnya aplikasi ini mungkin masih jauh sekali dari kejadian sebenarnya, akan tetapi aplikasi ini mungkin dapat sebagai dasar dari palang kereta api yang dapat berjalan secara otomatis. Palang kereta api otomatis ini mempunyai tiga bagian umum yaitu motor Servo yang akan berputar untuk membuka dan menutup palang, sensor inframerah sebagai pendeteksi adanya kereta api yang lewat, dan otak yaitu bagian mikrokonrroler Atmega 328. Mikrokontroler ini yang akan mengendalikan semua jalannya system yang terdapat pada palang kereta api otomatis. Yaitu mengendalikan masukan system yang berupa sensor-sensor, mengendalikan pergerakan motor Servo sebagai penggerak palang, mengendalikan sebuah tampilan berupa teks berjalan, dan pembangkit pulsa 300 Hz, 500 Hz yang dimanfaatkan sebagai Buzzer. Tujuan tugas akhir ini adalah merancang dan mengimplementasikan palang kereta api otomatis dengan menggunakan mikrokontroler Atmega 328 dan sensor inframerah. Basis pengetahuan palang ini berisi pengkodean aksi yang harus dilakukan berdasarkan informasi dari sensor.
Kata Kunci : Buzzer, Sensor Inframerah, Atmega 328, Palang kereta api
THE APPLICATION OF ATMEGA 328 MICROCONTROLLER AS A BASE ON THE TRAIN BEAM
WITH WARNING SYSTEM AND RUNNING TEXT DISPLAY
ABSTRACT
The automatic railroad crossing is an automation that is applied to railway transportation lines to close and open roads that limit or stop the traffic lane so that vehicles stop temporarily to prioritize trains that will pass. This application is just a small prototype that illustrates an application for railroad bars that can move automatically, compared to the actual application of this application may still be very far from the actual event, but this application may be as a basis for railroad beams that can run automatically. This automatic railroad bar has three general parts, namely the Servo motor that will spin to open and close the bar, infrared sensors to detect passing trains, and the brain, the atmega 328 microcontroller. This microcontroller will control all the way the system is in the automatic railroad bar.
Namely controlling the input system in the form of sensors, controlling the movement of the Servo motor as a driving bar, controlling a display in the form of running text, and generating 300 Hz, 500 Hz pulses that are used as Buzzers. The purpose of this final project is to design and implement an automatic railroad bar using an atmega 328 microcontroller and an infrared sensor. This knowledge base contains the coding of actions that must be performed based on information from the sensor.
Keywords: Buzzer, Infrared Sensor, Atmega 328, Railroad crossing
KATA PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Pemurah dan Maha Penyayang, dengan limpah karunia-Nya penulis dapat menyelesaikan penyusunan Tugas Akhir ini dengan judul Aplikasi Mikrokontroler ATmega 328 sebagai Basis pada Palang Kereta Api dengan Tampilan Running Text.
Ucapan terimakasih penulis sampaikan kepada berbagai pihak yang telah banyak membantu penulis dalam menyelesaikan laporan Tugas Akhir ini yaitu Kepada:
1. Bapak Prof. Dr. Kerista Sebayang, MS selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Bapak Drs. Takdir Tamba,M.Eng.Sc selaku Ketua Program Studi D-III Fisika Fakultas MIPA Universitas Sumatera Utara.
3. Bapak Dr. Perdinan Sinuhaji, MS selaku Pembimbing yang telah membimbing dan mengarahkan Kepada Penulis dalam menyelesaikan Laporan Tugas Akhir
4. Seluruh staf Pengajar/Pegawai Program Studi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
5. Orangtua tercinta yang telah memberikan bantuan berupa dukungan moral dan material yang sangat membantu dalam menyelesaikan Laporan Tugas Akhir
6. Kepada saudara tecinta, Amri Ginting, Eka Sinaga, Nova Ginting dan Jefri Ginting yang telah memberi semangat dalam menyelesaikan Laporan Tugas Akhir
7. Senior kami Andhika Siregar yang telah memberikan bantuan berupa Ilmu dan Motivasi dalam menyelesaikan Laporan Tugas Akhir
8. Sahabat saya semua Anggota PEKKA yang telah memberikan semangat dalam menyelesaikan Tugas Akhir
9. Sahabat saya Lusia Sinaga, Christin Petra Sihombing, Elisa Parhusip, Hendrianto Nainggolan, Christin Tobing, Yuanesta Sebayang, Nicho
DAFTAR ISI
Halaman
PENGESAHAN TUGAS AKHIR ... i
ABSTRAK ... ii
ABSTRACT ... iii
PENGHARGAAN ... iv
DAFTAR ISI ... vi
DAFTAR GAMBAR ... vii
DAFTAR TABEL ... ix
BAB I PENDAHULUAN 1.1 Latar Belakang. ... 1
1.2 Rumusan Masalah. ... 2
1.3 Tujuan. ... 2
1.4 Batasan Masalah. ... 2
1.5 Sistematika Penulisan. ... 2
BAB II LANDASAN TEORI 2.1 Mikrokontroller ATMega328. ... 5
2.1.1 Arsitektur dan Konfigurasi pin ATMega328. ... 7
2.1.2 Konfigurasi Pin ATMega328. ... 8
2.1.3 Konfigurasi Mikrokontroler ATMega328. ... 11
2.1.4 Komunikasi Serial Pada ATMega328... 12
2.1.5 Daya ... 13
2.1.6 Spesifikasi Mikrokontroler ATMega328 ... 13
2.2 Sensor Inframerah. ... 15
2.3 Motor Servo . ... 20
2.4 Running Text ... 23
2.4.1 Display 4 in 1 MAX7219 Dot Matrix ... 23
2.4.2 Spesifikasi Display 4 in 1 MAX7219 Dot Matrix ... 25
2.4.3 Hardware Yang Dibutuhkan ... 25
2.5 Power Supply Adaptor (PSA) ... 25
2.6 Buzzer . ... 26
BAB III PERANCANGAN DAN PEMBUATAN SISTEM
3.1 Metodologi Perancangan... 28
3.1.1 Tahap Persiapan ... 28
3.1.2 Tahap Pembuatan Sistem ... 30
3.1.2.1 Perancangan PCB ... 30
3.1.2.2 Pemeriksaan dan Perbaikan PCB ... 32
3.1.2.3 Penyolderan Komponen ... 32
3.2 Perancangan Sistem ... 33
3.2.1 Diagram Blok. ... 33
3.2.2 Perancangan Rangkaian ... 34
3.2.2.1 Perancangan Rangkaian Mikrokontroler ATMega328 ... 34
3.2.2.2 Perancangan Rangkaian Power Supply. ... 35
3.2.2.3 Perancangan Rangkaian Sensor Inframerah E18-D80NK. . 35
3.2.2.4 Perancangan Rangkaian Display 4 in 1 Max7219 Dot Matrix. ... 36
3.2.2.5 Perancangan Rangkaian Motor Servo. ... 37
3.2.3 Perancangan Perangkat Lunak Sistem ... 38
3.2.3.1 Flow Chart ... 38
3.2.3.2 Perancangan Pemrograman Sistem ... 41
3.3 Pengujian Rangkaian dan Pengujian Hasil ... 42
3.3.1 Pengujian Mikrokontroler. ... 42
3.3.2 Pengujian Rangkaian Power Supply. ... 42
3.3.3 Pengujian Sensor Inframerah E18-D80NK. ... 43
3.3.4 Pengujian Modul Modul 4 in 1 MAX7219 Dot Matrix. ... 44
3.3.5 Pengujian Motor Servo. ... 45
BAB IV PEMBAHASAN HASIL PENGUKURAN 4.1 Analisa Hasil Pengukuran ... 47
4.1.1 Pengukuran Sensor Inframerah ... 47
4.1.2 Pengukuran Tegangan Power Supply ... 50
4.2 Analisa Pembahasan ... 50
4.3 Program Keseluruhan Sistem ... 50
4.4 Gambar Fisik Alat Sistem ... 54
BAB V PENUTUP 5.1 Kesimpulan ... 55
5.2 Saran ... 56
DAFTAR PUSTAKA ... 57 LAMPIRAN
DAFTAR GAMBAR
Nomor Judul Halaman
Gambar
2.1 Arsitektur ATMega328 7
2.2 Konfigurasi Pin ATMega328 8
2.3 Peta Memori Mikrokontroller AVR 12
2.4 Sensor Infrared E18-D80NK 18
2.5 Motor Servo 21
2.6 Display 4 in 1 MAX7219 Dot Matrix 24
2.7 Adaptor 26
2.8 Buzzer 27
3.1 Layout PCB Mirkokontroler ATmega328 Atas 31
3.2 Layout PCB Mirkokontroler ATmega328 Bawah 31
3.3 Layout Rangkaian Motor Servo dan Buzzer 31
3.4 Diagram Blok 33
3.5 Rangkaian Mikrokontroler ATMega328 . 34
3.6 Rangkaian Power Suplly 35
3.7 Rangkaian Sensor Inframerah E18-D80NK 36
3.8 Rangkaian Modul Display 4 in 1 MAX7219 Dot Matrix 37
3.9 Rangkaian Motor Servo MG995 38
3.10 Flowchart 39
3.11 Pemrograman Sistem 41
3.12 Pengujian Rangkaian Power Supply 43
3.13 Pengujian sensor ketika jarak deteksi <= jarak sensor kedinding 43 3.14 Pengujian sensor ketika jarak deteksi > jarak sensor kedinding 43 3.15 Pengujian Rangkaian Modul 4 in 1 MAX7219 Dot Matrix 45
4.1 Tampak Fisik Alat Sistem 54
DAFTAR TABEL
Nomor Judul Halaman
Tabel
2.1 Spesifikasi keluarga AVR 6
2.2 Konfigurasi Port B 9
2.3 Konfigurasi Port C 10
2.4 Konfigurasi Port D 11
3.1 Pin Digital 37
3.2 Koneksi Motor Servo Ke RangkaianMikrokontroler 38
4.1 Pengukuran Sensor Inframerah 1 47
4.2 Pengukuran Sensor Inframerah 2 48
4.3 Pengukuran Jarak Max dan Min Sensor Inframerah 48
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Dewasa ini marak kita dengar media yang memberitakan kecelakaan yang terjadi dimana-mana bukan saja hanya dialami oleh pengguna transportasi melalui darat saja,baik udara maupun air juga.Disini penulis hanya berusaha membuat otomatisasi palang kereta api yang tak kalah marak juga berita kecelakaannya kita dengar dimana-mana.
Untuk itu penulis merancang sebuah alat yang dapat membuat palang kereta api akan terbuka dan tertutup dengan sendirinya sesuai dengan sensor yang digunakan untuk mendeteksi letak dari kereta api yang akan menghalanginya.Dimana judul dari Tugas Akhir ini adalah”Aplikasi Mikrokontroler ATmega 328 Pada Palang Kereta Api dengan Sistem Peringatan dan Tampilan Running Text”.Alat ini diciptakan dengan tujuan untuk mengurangi kecelakan yang terjadi akibat kelalaian atau kecerobohan pihak-pihak tertentu yang mungkin secara tidak sengaja lupa untuk menutup palang sementara jarak kereta api dengan rel yang dilewati kendaraan semakin dekat dengan keadaan seperti itu kecelakaan tak akan dapat lagi terhindari.Kita tahu sendiri suatu operasi secara manual menyita lebih banyak tenaga dan perhatian penuh.
Hal itulah yang melatarbelakangi pembuatan palang otomatis tersebut.Alat ini dapat digunakan pada setiap rel yang dilalui oleh pengguna jal;an raya.Jika salah satu sensor luar (kiri / kanan ) terhalangi oleh kereta api maka secara otomatis palang akan tertutup, begitu juga sebaliknya apabila salah satu sensor dalam ( kiri / kanan) terhalangi.
Oleh kereta api yang melewatinya maka palang akan terbuka dalam arti pengguna jalan bisa beroperasi kembali. Alat ini nantinya diharapkan dapat menyelesaikan masalah kecelakaan akibat kelalaian dalam membuka dan menutup rel saat kereta api mendekati atau menjauhi palang,meskipun alat ini belum begitu sempurna.
1.2 Rumusan Masalah
Berdasarkan uraian diatas, maka permasalahan yang dikaji adalah sebagai berikut:
1. Bagaimana sistem kerja dari alat Palang Kereta Api dengan Sistem Peringatan dan Tampilan Running Text.
2. Bagaimana cara perancangan dan pembuatan alat Palang Kereta Api dengan Sistem Peringatan Tampilan Running Text.
3. Bagaimana mengaplikasikan Mikrokontroler ATmega 328 sebagai pengontrol, penerima, dan pengolahan pada sistem elektronika pada alat Palang Kereta Api dengan Sistem Peringatan dan Tampilan Running Text.
1.3 Tujuan
1. Membuat otomatisasi palang kereta api berbasis Mikrokontroller ATmega 328 dan menggunakan sensor inframerah sebagai sensor halangan.
2. Mengaplikasikan berbagai teori pendukung yang telah didapat di bangku perkuliahan menjadi sebuah karya nyata berupa sebuah alat.
3. Membuat suatu alat yang dapat membantu dan meminimalisir biaya pekerjaan manusia.
1.4 Batasan Masalah
Dalam perancangan dan pembuatan Tugas Akhir ini di berikan batasan masalah sebagai berikut :
1. Membahas prinsip kerja otomatisasi palang tersebut secara keseluruhan.
2. Membahas teori-teori dasar tentang Mikrokontroller ATmega 328.
3. Membahas cara kerja dari sensor inframerah sebagai sensor halangan.
1.5 Sistematika Penulisan
Berikut merupakan sistem penulisan yang digunakan dalam penyusunan laporan Tugas Akhie :
1. BAB I PENDAHULUAN
Bab ini berisi penjelasan mengenai latar belakang pemilihan judul, batasan masalah, motivasi dan tujuan tugas Proyek, sasaran Tugas Akhir, metode Tugas Akhir dan sistematika penulisan.
2. BAB II LANDASAN TEORI
Bab ini berisi laporan teori yang menjadi referensi utama dalam penulisan tugas akhir. Teori yang dibahas berhubungan dengan sistem yang akan dibuat dan juga yang akan digunakan untuk kepentingan analisis dan perancangan 3. BAB III PERANCANGAN DAN PEMBUATAN SISTEM
Bab ini membahas tentang perencanaan prototype alat, pembuatan rangkaian prototype, blok diagram, pengkuran dan cara kerja rangkaian ang dapat menghasilkan Alat Palang Kereta Api dengan Sistem Peringatan dan Tampilan Running Text.
4. BAB IV PEMBAHASAN HASIL PENGUKURAN
Pada bab ini akan dibahas hasil analisa dari rangkaian dan sistem kerja alat, penjelasan mengenai program-program yang digunakan untuk mengaktifkan rangkaian, penjelasan mengenai program yang diisikan ke mikrokontroler.
5. BAB V: KESIMPULAN DAN SARAN
Bab ini menjelaskan tentang kesimpulan dari pengujian dan saran masukan untuk mengembangkan dan melengkapi sistem yang sudah dibangun untuk masa yang mendatang.
BAB II LANDASAN TEORI
Mikrokontroler adalah sebuah sistem komputer fungsional dalam sebuah chip. Di dalamnya terkandung sebuah inti prosesor, memori (sejumlah kecil RAM, memori program, atau keduanya), dan perlengkapan input output. Dengan kata lain, mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data. Sekedar contoh, bayangkan diri Anda saat mulai belajar membaca dan menulis, ketika anda sudah bisa melakukan hal itu anda bisa membaca tulisan apapun baik buku, cerpen, artikel dan sebagainya, dan anda pun bisa pula menulis hal-hal sebaliknya. Begitu pula jika anda sudah mahir membaca dan menulis data maka anda dapat membuat program untuk membuat suatu sistem pengaturan otomatik menggunakan mikrokontroler sesuai keinginan anda. Mikrokontroler merupakan komputer didalam chip yang digunakan untuk mengontrol peralatanelektronik, yang menekankan efisiensi dan efektifitas biaya. Secara harfiahnya bisa disebut “pengendali kecil”
dimana sebuah sistem elektronik yangsebelumnya banyak memerlukan komponen- komponen pendukung seperti IC TTL dan CMOS dapat direduksi/diperkecil dan akhirnya terpusat serta dikendalikan oleh mikrokontroler ini. Mikrokonktroler digunakan dalam produk dan alat yang dikendalikan secara automatis, seperti sistem kontrol mesin, remote controls, mesin kantor, peralatan rumah tangga, alat berat, dan mainan. Dengan mengurangi ukuran, biaya, dan konsumsi tenaga dibandingkan dengan mendesain menggunakan mikroprosesor memori, dan alat input output yang terpisah, kehadiran mikrokontroler membuat kontrol elektrik untuk berbagai proses menjadi lebih ekonomis. Dengan penggunaan mikrokontroler ini maka :
1. Sistem elektronik akan menjadi lebih ringkas
2. Rancang bangun sistem elektronik akan lebih cepat karena sebagian besar dari sistem adalah perangkat lunak yang mudah dimodifikasi
3. Pencarian gangguan lebih mudah ditelusuri karena sistemnya yang kompak agar sebuah mikrokontroler dapat berfungsi, maka mikrokontroler tersebut memerlukan komponen eksternal yang kemudian disebut dengan sistem
minimum. Untuk membuat sistem minimal paling tidak dibutuhkan sistem clock dan reset, walaupun pada beberapa mikrokontroler sudah menyediakan sistem clock internal, sehingga tanpa rangkaian eksternal pun mikrokontroler sudah beroperasi. Yang dimaksud dengan sistem minimal adalah sebuah rangkaian mikrokontroler yang sudah dapat digunakan untuk menjalankan sebuah aplikasi. Sebuah IC mikrokontroler tidakakan berarti bila hanya berdiri sendiri. Pada dasarnya sebuah sistem minimal mikrokontroler AVR memiliki prinsip yang sama.
AVR adalah sebuah mikrokontroler yang dibuat dengan menggunakan arsitektur Harvard dimana data dan program disimpan secara terpisah sehingga sangat baik untuk sebuah sistem terbenam di lapangan karena terlindungi dari interferensi yang dapat merusak isi program. Salah satu mikrokontroler keluarga AVR yang dipergunakan pada penelitian ini yaitu ATmega328. ATMega328 memiliki fitur cukup lengkap, mulai dari kapasitas memori program dan memori data yang cukup besar, interupsi, timer/counter, PWM, USART, TWI, analog comparator, EEPROM internal dan juga ADC internal.
Salah satu contoh mikrokontroler yang banyak beredar atau dipergunakan
dipasaran adalah Mikrokontroler ATMega 328. [1]
2.1 Mikrokontroler ATMega328
ATMega 328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang dimana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer). Mikrokontroller ATmega 328 memiliki arsitektur Harvard, yaitu memisahkan memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan kerja dan parallelism. Instruksi –instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil dari memori program.
Konsep inilah yang memungkinkan instruksi –instruksi dapat dieksekusi dalam setiap satu siklus clock. 32 x 8-bit register serba guna digunakan untuk mendukung operasi pada ALU ( Arithmatic Logic unit ) yang dapat dilakukan dalam satu siklus. 6 dari register serbaguna ini dapat digunakan sebagai 3 buah register
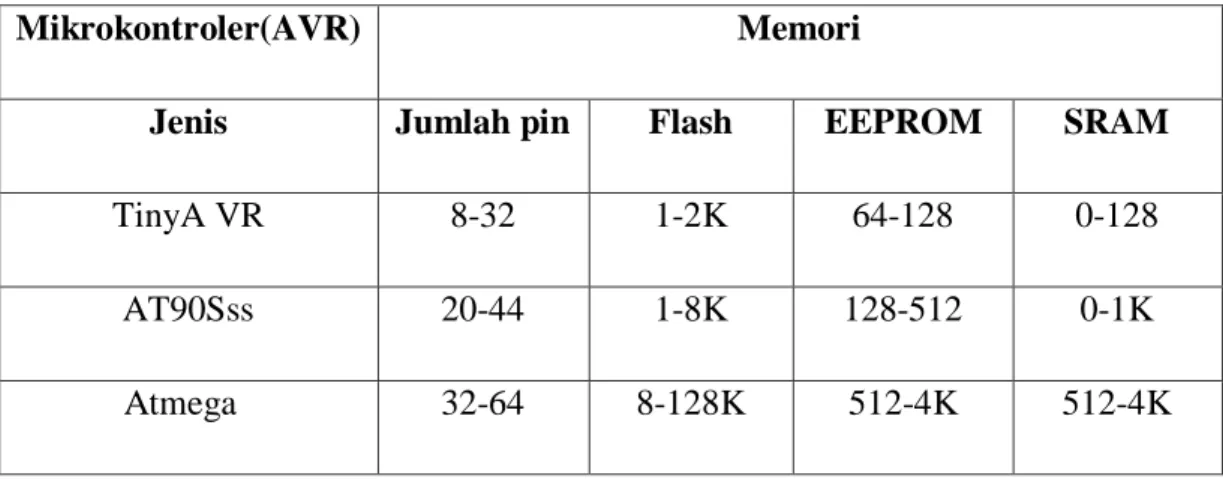
pointer 16-bit pada mode pengalamatan tak langsung untuk mengambil data pada ruang memori data. Ketiga register pointer 16-bit ini disebut dengan register X ( gabungan R26 dan R27 ), register Y ( gabungan R28 dan R29 ), dan register Z ( gabungan R30 dan R31 ).ATMega328 Secara umum, AVR dapat dikelompokkan menjadi tiga kelas, yaitu TinyAVR, AT90Sxx, dan ATmega. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakanhampir sama [4]
Tabel 2.1 Spesifikasi keluarga AVR
Mikrokontroler(AVR) Memori
Jenis Jumlah pin Flash EEPROM SRAM
TinyA VR 8-32 1-2K 64-128 0-128
AT90Sss 20-44 1-8K 128-512 0-1K
Atmega 32-64 8-128K 512-4K 512-4K
Adapun Fitur AVR dari ATMega 328 yaitu sebagai berikut dibawah ini:
1. 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
2. 32 x 8-bit register serba guna.
3. Kecepatan mencapai 16 MIPS dengan clock 16 MHz.
4. 32 KB Flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB dari flash memori sebagai bootloader.
5. Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1KB sebagai tempat penyimpanan data semi permanent karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
6. Memiliki SRAM (Static Random Access Memory) sebesar 2KB.
7. Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM (Pulse Width Modulation) output.
8. Master / Slave SPI Serial interface.
Mikrokontroller ATmega 328 memiliki arsitektur Harvard, yaitu memisahkan memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan kerja dan parallelism. Instruksi – instruksi dalam memori. Program dieksekusi dalam satu alur tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil dari memori program. Konsep inilah yang memungkinkan instruksi – instruksi dapat dieksekusi dalam setiap satu siklus clock. 32 x 8-bit register serba guna digunakan untuk mendukung operasi pada ALU (Arithmatic Logic unit) yang dapat dilakukan dalam satu siklus. 6 dari register serbaguna ini dapat digunakan sebagai 3 buah register pointer 16-bit pada mode pengalamatan tidak langsung untuk mengambil data pada ruang memori data Ketiga register pointer 16-bit ini disebut dengan register X ( gabungan R26 dan R27 ), register Y ( gabungan R28 dan R29 ), dan register Z ( gabungan R30 dan R31 ). Hampir semua instruksi AVR memiliki format 16-bit. Setiap alamat memori program terdiri dari instruksi 16- bit atau 32-bit.
Selain register serba guna di atas, terdapat register lain yang terpetakan dengan teknik memory mapped I/O selebar 64 byte. Beberapa register ini digunakan untuk fungsi khusus antara lain sebagai register control Timer/ Counter, Interupsi, ADC, USART, SPI, EEPROM, dan fungsi I/O lainnya. Register – register ini menempati
memori pada alamat 0x20h – 0x5Fh. [9]
2.1.1 Arsitektur dan Konfigurasi pin ATMega 328 Berikut ini adalah tampilan arsitektur ATmega 328 :
Gambar 2.1. Arsitektur ATMega328
2.1.2 Konfigurasi Pin ATMega 328
Berikut ini adalah Konfigurasi Pin ATMega 328
Gambar 2.2. Konfigurasi Pin ATMega328
ATMega328 memiliki 3 buah PORT utama yaitu PORTB, PORTC, dan PORTD dengan total pin input/output sebanyak 23 pin. PORT tersebut dapat difungsikan sebagai input/output digital atau difungsikan sebagai periperal lainnya.
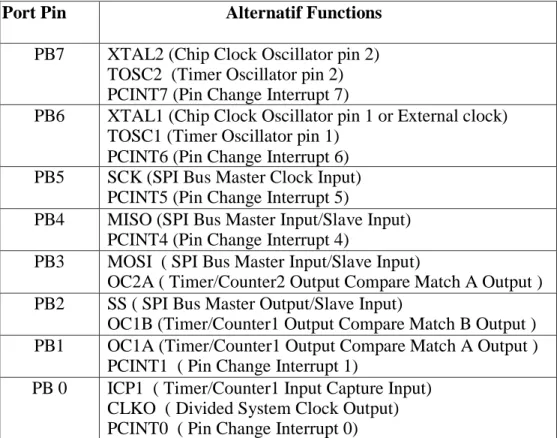
1. Port B
Port B merupakan jalur data 8 bit yang dapat difungsikan sebagai input/output. Selain itu Port B juga dapat memiliki fungsi alternatif seperti di bawah ini.
a. ICP1 (PB0), berfungsi sebagai Timer Counter 1 input capture pin.
b. OC1A (PB1), OC1B (PB2) dan OC2 (PB3) dapat difungsikan sebagai keluaran PWM (Pulse Width Modulation).
c. MOSI (PB3), MISO (PB4), SCK (PB5), SS (PB2) merupakan jalur komunikasi SPI.
d. Selain itu pin ini juga berfungsi sebagai jalur pemograman serial e. TOSC1 (PB6) dan TOSC2 (PB7) dapat difungsikan sebagai
sumber clock external untuk timer.
f. XTAL1 (PB6) dan XTAL2 (PB7) merupakan sumber clock utama mikrokontroler.
Tabel 2.2. Konfigurasi Port B
Port Pin Alternatif Functions PB7 XTAL2 (Chip Clock Oscillator pin 2)
TOSC2 (Timer Oscillator pin 2) PCINT7 (Pin Change Interrupt 7)
PB6 XTAL1 (Chip Clock Oscillator pin 1 or External clock) TOSC1 (Timer Oscillator pin 1)
PCINT6 (Pin Change Interrupt 6) PB5 SCK (SPI Bus Master Clock Input)
PCINT5 (Pin Change Interrupt 5)
PB4 MISO (SPI Bus Master Input/Slave Input) PCINT4 (Pin Change Interrupt 4)
PB3 MOSI ( SPI Bus Master Input/Slave Input)
OC2A ( Timer/Counter2 Output Compare Match A Output ) PB2 SS ( SPI Bus Master Output/Slave Input)
OC1B (Timer/Counter1 Output Compare Match B Output ) PB1 OC1A (Timer/Counter1 Output Compare Match A Output )
PCINT1 ( Pin Change Interrupt 1)
PB 0 ICP1 ( Timer/Counter1 Input Capture Input) CLKO ( Divided System Clock Output) PCINT0 ( Pin Change Interrupt 0)
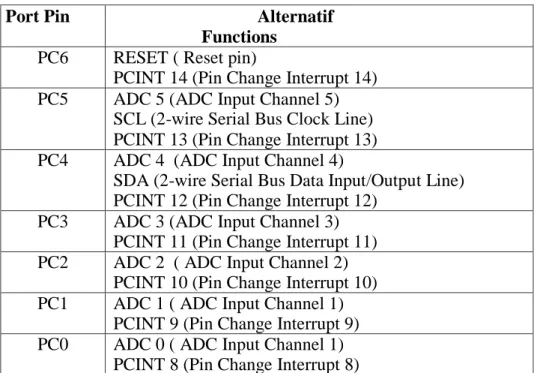
2. Port C
Port C merupakan jalur data 7 bit yang dapat difungsikan sebagai input/output digital. Fungsi alternatif PORTC antara lain sebagai berikut.
a. ADC6 channel (PC0,PC1,PC2,PC3,PC4,PC5) dengan resolusi sebesar 10 bit. ADC dapat kita gunakan untuk mengubah input yang berupa tegangan analog menjadi data digital.
b. I2C (SDA dan SDL) merupakan salah satu fitur yang terdapat pada PORTC. I2C digunakan untuk komunikasi dengan sensor atau device lain yang memiliki komunikasi data tipe I2C seperti sensor kompas, accelerometer nunchuck.
Tabel 2.3. Konfigurasi Port C
Port Pin Alternatif Functions
PC6 RESET ( Reset pin)
PCINT 14 (Pin Change Interrupt 14) PC5 ADC 5 (ADC Input Channel 5)
SCL (2-wire Serial Bus Clock Line) PCINT 13 (Pin Change Interrupt 13) PC4 ADC 4 (ADC Input Channel 4)
SDA (2-wire Serial Bus Data Input/Output Line) PCINT 12 (Pin Change Interrupt 12)
PC3 ADC 3 (ADC Input Channel 3) PCINT 11 (Pin Change Interrupt 11) PC2 ADC 2 ( ADC Input Channel 2)
PCINT 10 (Pin Change Interrupt 10) PC1 ADC 1 ( ADC Input Channel 1)
PCINT 9 (Pin Change Interrupt 9) PC0 ADC 0 ( ADC Input Channel 1)
PCINT 8 (Pin Change Interrupt 8)
3. Port D
Port D merupakan jalur data 8 bit yang masing-masing pin-nya juga dapat difungsikan sebagai input/output. Sama seperti Port B dan Port C, Port D juga memiliki fungsi alternatif dibawah ini.
a. USART (TXD dan RXD) merupakan jalur data komunikasi serial dengan level sinyal TTL. Pin TXD berfungsi untuk mengirimkan data serial, sedangkan RXD kebalikannya yaitu sebagai pin yang berfungsi untuk menerima data serial.
b. Interrupt (INT0 dan INT1) merupakan pin dengan fungsi khusus sebagai interupsi hardware. Interupsi biasanya digunakan sebagai selaan dari program, misalkan pada saat program berjalan kemudian terjadi interupsi hardware/software maka program utama akan berhenti dan akan menjalankan program interupsi.
c. XCK dapat difungsikan sebagai sumber clock external untuk USART, namun kita juga dapat memanfaatkan clock dari CPU, sehingga tidak perlu membutuhkan externalclock.
d. T0 dan T1 berfungsi sebagai masukan counter external untuk timer 1 dan timer 0.
e. AIN0 dan AIN1 keduanya merupakan masukan input untuk analog
comparator.
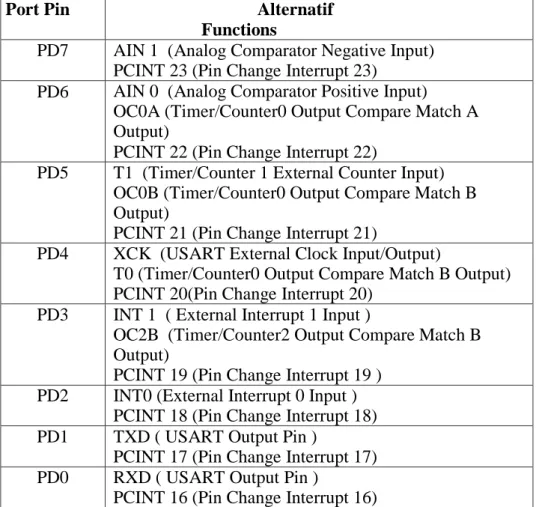
Tabel 2.4. Konfigurasi Port D
Port Pin Alternatif Functions
PD7 AIN 1 (Analog Comparator Negative Input) PCINT 23 (Pin Change Interrupt 23)
PD6 AIN 0 (Analog Comparator Positive Input) OC0A (Timer/Counter0 Output Compare Match A Output)
PCINT 22 (Pin Change Interrupt 22)
PD5 T1 (Timer/Counter 1 External Counter Input) OC0B (Timer/Counter0 Output Compare Match B Output)
PCINT 21 (Pin Change Interrupt 21)
PD4 XCK (USART External Clock Input/Output)
T0 (Timer/Counter0 Output Compare Match B Output) PCINT 20(Pin Change Interrupt 20)
PD3 INT 1 ( External Interrupt 1 Input )
OC2B (Timer/Counter2 Output Compare Match B Output)
PCINT 19 (Pin Change Interrupt 19 ) PD2 INT0 (External Interrupt 0 Input )
PCINT 18 (Pin Change Interrupt 18) PD1 TXD ( USART Output Pin )
PCINT 17 (Pin Change Interrupt 17) PD0 RXD ( USART Output Pin )
PCINT 16 (Pin Change Interrupt 16) 2.1.3 Kontruksi Mikrokontroler ATMega 328.
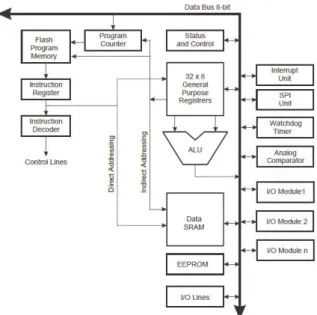
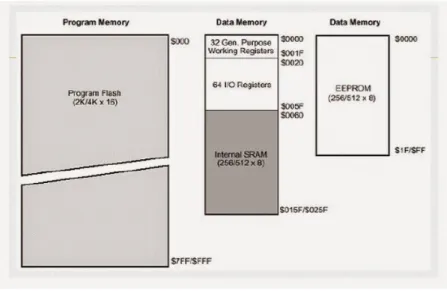
Mikrokontroler ATMega328 memiliki 3 jenis memori, yaitu memori program, memori data dan memori EEPROM. Ketiganya memiliki ruang sendiri dan terpisah.
1. Memori program ATmega328 memiliki kapasitas memori progam sebesar 8K byte yang terpetakan dari alamat 0x0000 –0x3FFF dimana masing- masing alamat memiliki lebar data 32 bit. Memori program ini terbagi menjadi 2 bagian yaitu bagian program boot dan bagian program aplikasi.
2. Memori data Memori data ATmega328 terbagi menjadi 3 bagian yaitu register serba guna, register I/O dan SRAM. ATmega328 memiliki 32 register serba guna, 64 register I/O yang dapat diakses sebagai bagian dari memori RAM (menggunakan instuksi LD atau ST) atau dapat juga diakses sebagai I/O (menggunakan instruksi IN atau OUT), dan 2048 byte memori data SRAM.
3. Memori EEPROM ATmega328 memiliki memori EEPROM sebesar 1K byte yang terpisah dari memori program maupun memori data. Memori EEPROM ini hanya dapat diakses dengan menggunakan register-register I/O yaitu register EEPROM Address, register EEPROM Data, dan register EEPROM Control. Untuk mengakses memori EEPROM ini diperlakukan seperti mengakses data eksternal, sehingga waktu eksekusinya relatif lebih lama bila dibandingkan dengan mengakses data
dari SRAM. [3]
Gambar 2.3. Peta Memori Mikrokontroller AVR
2.1.4 Komunikasi Serial Pada ATMega 328
Atmega328 menyediakan komunikasi serial UART TTL (5V) yang tersedia di pin 0 (RX) dan pin 1 (TX). Sebuah chip FTDI yang terdapat pada board berfungsi menterjemahkan bentuk komunikasi ini melalui USB dan akan tampil sebagai Virtual Port di komputer. Pada Arduino Software (IDE) terdapat monitor serial yang memudahkan data textual untuk dikirim menuju Arduino atau keluar dari Arduino.
Lampu led TX dan RX akan menyala berkedip-kedip ketika ada data yang
ditransmisikan melalui chip FTDI USB to Serial via kabel USB ke komputer. Untuk menggunakan komunikasi serial dari digital pin, gunakan Software Serial library.
Chip ATmega328 juga mendukung komunikasi I2C (TWI) dan SPI. Di dalam Arduino Software (IDE) sudah termasuk Wire Library untuk memudahkan anda menggunakan bus I2C. Untuk menggunakan komunikasi SPI, gunakan SPI library.
2.1.5 Daya
Mikrokontroler Atmega 328 dapat diaktifkan dengan catu daya eksternal.
Adaptor ini dapat dihubungkan dengan menancapkan plug positif 2.1mm ke colokan listrik. Dari baterai dapat dimasukan dalam Gnd dan Vinpin header dari konektor power. Mikrokontroler Atmega 328 ini dapat beroperasi pada pasokan tegangan eksternal 6 sampai 20 volt. Jika diberikan dengan kurang dari 7 volt, pin yang keluaran 5 volt mungkin pasokannya kurang dari 5 volt dan mikrokontroler Atmega 328 mungkin tidak stabil. Jika menggunakan lebih dari 12 volt, regulator tegangan bisa panas dan merusak IC mikro. Kisaran yang disarankan adalah 7-12 volt. Pin sumber daya dalam mikrokontroler Atmega 328 ini adalah sebagai berikut :
2.1.5.1 VIN Tegangan masukan pada mikrokontroler Atmega 328 menggunakan sumber daya eksternal.
2.1.5.2 5V Catu daya 5 volt ini digunakan untuk daya mikrokontroler dan komponen lainnya pada boardmikrokontroler Atmega 328. Hal ini dapat terjadi dilakukan dari pin VIN melalui regulator on-board, atau melalui port USB atau sumber tegangan lainnya seperti adaptor.
2.1.5.3 GND Pin ground [10]
2.1.6 Spesifikasi Mikrokontroller ATmega328
1. Kinerja tinggi, rendah daya Atmel®AVR® 8-bit Microcontroller 2. Advanced RISC Architecture
a. 130 Instruksi Powerfull - Kebanyakan Single-jam Siklus Eksekusi b. 32 × 8 General Purpose Kerja Register
c. Operasi Fully Static
d. Sampai dengan 16MIPS throughput di 16MHz e. On-chip 2-siklus Multiplier\
3. Segmen Memory Tinggi Ketahanan Non-volatile
a. 8Kbytes In-System Self-programmable memori program flash b. 512bytes EEPROM
c. SRAM 1Kbyte internal
d. Menulis / Erase Cycles: 10.000 Flash / 100.000 EEPROM e. Data retensi: 20 tahun pada 85 °C / 100 tahun pada 25 °C (1) f. Opsional Boot Kode Bagian dengan Independent Lock Bits g. In-System Programming secara On-chip Program Boot h. Benar Operasi Baca-Sementara-Write
i. Kunci Pemrograman untuk Security Software 4. Fitur Peripheral.
a. Dua 8-bit Timer / Counter dengan Prescaler terpisah, satu Bandingkan Modus.
b. Satu 16-bit Timer / Counter dengan Prescaler terpisah, Bandingkan Mode, dan Tangkap
c. Mode
d. Real Time Counter dengan Oscillator terpisah e. Tiga Saluran PWM
f. 8-channel ADC di TQFP dan QFN / MLF paket g. Delapan Saluran 10-bit Akurasi
h. 6-channel ADC dalam paket PDIP i. Enam Saluran 10-bit Akurasi
j. Byte berorientasi Dua-kawat Serial Interfacek.Programmable Serial USART
k. Programmable Serial USART l. Master / Slave SPI Serial Interface
m. Programmable Watchdog Timer dengan terpisah On-chip Oscillator n. On-chip Analog Comparator
5. Fitur Mikrokontroler Khusus.
a. Power-on ulang dan Programmable Brown-out Detection b. Internal dikalibrasi RC Oscillator
c. Eksternal dan Sumber Interrupt internal
d. Lima Mode Sleep: Idle, ADC Noise Reduction, Power-save, Power- down, dan
e. Bersiap
6. I / O dan Paket
a. 23 Programmable I / O Garis.
b. 28-lead PDIP, 32-lead TQFP, dan 32-pad QFN / MLF 7. Tegangan Operasi
a. 2.7V -5.5V (ATmega8L) b. 4.5V -5.5V (ATmega8) 8. Kelas Kecepatan
a. 0 - 8MHz (ATmega8L) b. 0 - 16MHz (ATmega8)
9. Konsumsi Daya di 4Mhz, 3V, 25°C a. Aktif: 3.6mA
b. Menganggur Mode: 1.0mA
c. Power-down Mode: 0.5μA [5]
2.2 Sensor Inframerah
Sensor adalah peralatan yang digunakan untuk mengubah suatu besaran fisik menjadi besaran listrik sehingga dapat dianalisa dengan rangkaian tertentu, hampir seluruh rangkaian elektronika mempunyai sensor didalamnya. Prinsip kerja dari alat ini adalah mengubah energi dari foton menjadi elektron. Idealnya satu foton dapat membangkitkan satu elektron. Infra Merah adalah radiasi elektromagnetik dari panjang gelombang lebih panjang dari cahaya tampak, tetapi lebih pendek dari radiasi gelombang radio. Namanya berarti "bawah merah" (dari bahasa Latin infra,
"bawah"), merah merupakan warna dari cahaya tampak dengan gelombang terpanjang. Radiasi inframerah memiliki jangkauan tiga "order" dan memiliki panjang gelombang antara 700 nm dan 1 mm.
LED adalah dioda yang menghasilkan cahaya saat diberi energi listrik. Dalam bias maju sambungan p-n terdapat rekombinasi antara electron bebas dan lubang (hole). Energi ini tidak seluruhnya diubah ke dalam bentuk energi cahaya atau photon melainkan dalam bentuk panas sebagian. Untuk dioda yang memancarkan cahaya inframerah (infrared emiting dioda = IRED). Sinar inframerah tidak dapat dilihat manusia , dengan menambahkan obat gallium arsenide dengan berbagai bahan dapat dibuat LED dengan output yang dapat dilihat seperti sinar merah, hijau, kuning, atau biru. Dioda yang memancarkan cahaya (LED) digunakan untuk display alphabet dan digital serta sebagai lampu tanda.
Sebagian besar LED membutuhkan 1,5 V sampai 2,2 V untuk memberi bias maju dan membutuhkan arus sekitar 20 mA sampai 30 mA untuk memancarkan cahaya. Dengan level-level tegangan yang lebih tinggi, LED dapat terbakar apabila tegangan maju yang diberikan melebihi 2 V. untuk mengatasi hal ini LED biasanya dihubungkan secara seri dengan tahanan yang membatasi tegangan dan arus pada nilai yang dikehendaki. Proses pemancaran cahaya akibat adanya energi listrik yang diberikan terhadap suatu bahan disebut dengan sifat elektroluminesensi. Material lain misalnya galiumarsenida pospat (GaP): photon energi cahaya dipancarkan untuk
menghasilkan cahaya tampak. [2]
Led inframerah adalah suatu jenis dioda yang apabila diberi tegangan maju maka arus majunya akan membangkitkan cahaya pada pertemuan PN-nya. Disini cahaya yang dibangkitkan adalah infra merah yang tidak dapat dilihat dengan mata.
Dioda-dioda yang digunakan terbuat dari bahan Galium (Ga), Arsen (As),dan Fosfor (P) atau disingkat GaAsP. Tegangan maju antara anoda-katoda berkisar antara 1,5V-2V, sedangkan arus majunya berkisar 5mA-20mA. Led inframerah sesuai dengan rancangannya memancarkan cahaya pada spectrum inframerah dengan panjang gelombang λ = 940 nm. Spectrum cahaya inframerah ini mempunyai level panas yang paling tinggi diantara sinar-sinar yang lain walaupun tidak tampak oleh mata dan mempunyai efek fotolistrik yang terkuat.
Prinsip utama dari rangkaian sensor ini seperti layaknya sebuah saklar yang memberikan perubahan tegangan apabila terdapat penghalang diantara transceiver dan receiver. Sensor ini memiliki dua buah piranti yaitu rangkaian pembangkit/pengirim (Led Inframerah) dan rangkaian penerima (Fotodiode).
Rangkaian pembangkit/pengirim memancarkan sinar inframerah kemudian pancarannya diterima oleh penerima (fotodioda) sehingga bersifat menghantar akibatnya tegangan akan jatuh sama dengan tegangan ground (0). Dan sebaliknya apabila tidak mendapat pancaran sinar inframerah maka akan menghasilkan tegangan.
Infra Merah banyak digunakan pada komunikasi jarak dekat, contoh paling umum pemakaian IR adalah remote kontrol (untuk TV). Gelombang IR mudah dibuat, harganya relatif murah dan lebih bersifat directional tak dapat menembus tembok atau benda gelap serta memiliki fluktuasi daya tinggi dan dapat diinterferensi
oleh cahaya matahari. Pengirim dan penerima IR menggunakan Light Emitting Diode ( LED ) dan Photo Sensitive Diode ( PSD ).Infra merah cukup efektif digunakan jika alat yang dikontrol terdapat pada lokasi yang sama dan tidak terlalu jauh ( kurang lebih 10 meter dan tidak ada penghalang ).
Berbeda dengan LED biasa, LED Infrared pada penggunaannya dapat diaktifkan dengan:
1. Tegangan DC untuk transmisi/sensor jarak dekat.
2. Tegangan AC (30 – 40 KHz) untuk transmisi/sensor jarak jauh.
Sifat-sifat cahaya infrared:
1. Tidak tampak manusia
2. Tidak dapat menembus materi yang tak tembus pandang 3. Dapat ditimbulkan oleh komponen yang menghasilkan panas
Sinar infra merah yang dipancarkan oleh pemancar infra merah tentunya mempunyai aturan tertentu agar data yang dipancarkan dapat diterima dengan baik di receiver. Komponen yang dapat menerima infra merah ini merupakan komponen yang peka cahaya yang dapat berupa dioda (photodioda) atau transistor (phototransistor). Komponen ini akan merubah energi cahaya, dalam hal ini energi cahaya infra merah menjadi pulsa-pulsa sinyal.
Komponen ini harus mampu mengumpulkan sinyal infra merah sebanyak mungkin, sehingga pulsa-pulsa sinyal listrik yang dihasilkan kualitasnya cukup baik.
Semakin besar intensitas infra merah yang diterima maka sinyal pulsa listrik yang dihasilkan akan baik, jika sinyal infra merah yang diterima intensitasnya lemah maka infra merah tersebut harus mempunyai pengumpul cahaya (light collector) yang cukup baik dan sinyal pulsa yang dihasilkan oleh sensor infra merah ini harus dikuatkan.
Pada prakteknya sinyal infra merah yang diterima intensitasnya sangat kecil sehingga perlu dikuatkan. Selain itu agar tidak terganggu oleh sinyal cahaya lain maka sinyal listrik yang dihasilkan oleh sensor infra merah harus difilter pada frekeunsi sinyal carrier yaitu pada 30KHz sampai 40KHz.
Selanjutnya baik photodioda maupun phototransistor disebut sebagai photodetector
Rangkaian pada jalur perlintasan kereta api dan pada pintu perlintasan kereta berfungsi sebagai pemicu sinyal untuk menyalakan sensor infra merah pemantau pintu perlintasan dan pemicu kalkulasi dari perhitungan timer pada mikrokontroller untuk menganalisa apakah terdapat kereta api melintas atau halangan dari lamanya kendaraan menutupi sinar infra merah yang keluar dari LED infra merah menuju
photo dioda pada pintu perlintasan. [6]
2.2.1 Sensor Infrared Tipe E18-D80NK
Sensor infrared tipe E18-D80NK adalah sensor untuk mendeteksi ada atau tidaknya suatu objek. Bila objek berada di depan sensor dan dapat terjangkau oleh sensor maka output rangkaian sensor akan berlogika “1” atau “high” yang berarti objek “ada”. Sebaliknya jika objek berada pada posisi yang tidak terjangkau olehsensor maka output rangkaian sensor akan bernilai “0” atau “low” yang berarti objek “tidak ada”.
Gambar 2.4. Sensor Infrared E18-D80NK
Sensor ini memiliki jarak deteksi panjang dan memiliki sensitifitas tinggi terhadap cahaya yang menghalanginya. Sensor ini memiliki penyesuaian untuk mengatur jarak terdeteksi. Sensor ini tidak mengembalikan nilai jarak. Implementasi sinyal IR termodulasi membuat sensor kebal terhadap gangguan yang disebabkan oleh cahaya normal dari sebuah bola lampu atau sinar matahari.
Ada dua metode utama dalam perancangan pemancar sensor infrared, yaitu:
1. Metode langsung, dimana infrared diberi bias layaknya rangkaian led biasa.
2. Metode dengan pemberian pulsa, mengacu kepada kurva karakteristik infrared tersebut. Metode pemberian pulsa juga masih rentan terhadap gangguan frekuensi luar, maka kita harus menggunakan teknik modulasi, dimana akan ada dua frekuensi yaitu frekuensi untuk data dan frekuensi untuk pembawa. Dengan teknik ini, maka penerima akan membaca data yang sudah dikirimkan tersebut.
Terdapat beberapa komponen yang dapat digunakan untuk penerima, yaitu:
1. Modul penerima jadi, yang dilengkapi dengan filter 38,5 Khz.
2. Fototransistor atau Fotodioda, kita harus membuat rangkaian tambahan misal dengan metode pembagi tegangan. Untuk aplikasi lebih lanjut, misalnya untuk mikrokontroler kita membutuhkan keluaran yang diskrit, dimana hanya logika satu atau nol yang dibutuhkan. Kondisi ini harus kita lengkapi dengan rangkaian komparator atau masuk ke transistor sebagai saklar. Kalau kita menggunakan data dengan teknik modulasi maka data yang dikirim harus difilter, berarti kita harus merancang filter yang akan membuang frekuensi tersebut, lalu masuk ke rangkaian buffer atau transistor sehingga keluarannya berupa sinyal diskrit.
Kelebihan infrared dalam pengiriman data:
1. Pengiriman data dengan infrared dapat dilakukan kapan saja, karena pengiriman dengan infrared tidak membutuhkan sinyal.
2. Pengiriman data dengan infrared dapat dikatakan mudah karena termasuk alat yang sederhana.
3. Pengiriman data dari ponsel tidak memakan biaya (gratis).
Kelemahan infrared dalam pengiriman data:
1. Pada pengiriman data dengan infrared, kedua lubang infrared harus berhadapan satu sama lain. Hal ini agak menyulitkan kita dalam mentransfer data karena caranya yang merepotkan.
2. Infrared sangat berbahaya bagi mata, sehingga jangan sekalipun sorotan infrared mengenai mata.
3. Pengiriman data dengan infrared dapat dikatakan lebih lambat
dibandingkan dengan rekannya Bluetooth Spesifikasi Sensor Infrared Tipe E18-D80NK:
1. Jarak Deteksi: 3 cm sampai 80 cm 2. Sumber Cahaya: Infrared
3. Dimensi: 18 mm (D) x 45mm (L) 4. Panjang Kabel Koneksi: 4.5 cm 5. Tegangan Input: 5V DC 6. Konsumsi Arus: 100 mA
7. Operasi Output: Normally Open (NO)
8. Output: NPN [11]
2.3 Motor Servo
Motor Servo adalah sebuah motor dengan sistem umpan balik tertutup di mana posisi dari Motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam Motor Servo. Motor ini terdiri dari sebuah motor DC, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran Servo. Sedangkan sudut dari sumbu motor Servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Motor servo biasanya hanya bergerak mencapai sudut tertentu saja dan tidak kontinyu seperti motor DC maupun motor stepper. Walau demikian, untuk beberapa keperluan tertentu, motor servo dapat dimodifikasi agar bergerak kontinyu. Pada robot, motor ini sering digunakan untuk bagian kaki, lengan atau bagian bagian lain yang mempunyai gerakan terbatas dan membutuhkan torsi cukup besar.
Motor servo adalah motor yang mampu bekerja dua arah CW (Clock Wise) dan CCW (Counter Clock Wise) dimana arah dan sudut pergerakan rotornya dapat dikendalikan hanya dengan memberikan pengaturan duty cycle sinyal PWM pada bagian pin kontrolnya.
Servo biasa digunakan untuk steering/kemudi pada pesawat atau mobil RC, untuk lengan robot, untuk pengarah sensor dan untuk keperluan lain yang membutuhkan gerakan. Servo dapat digerakkan dengan mengirimkan pulsa tegangan 5V DC yang diulang setiap 20 milidetik.
Panjang pulsa menentukan posisi putaran. Servo dirancang untuk menerima pulsa tegangan dengan variasi 0.75 milidetik sampai dengan 2.25 milidetik. Pada
umumnya Servo yang ada di pasaran sekarang ini mempunyai jangkauan gerakan 0 sampai dengan 180 derajat. Ini berarti pulsa 0.75 milidetik untuk 0 derajat. Pulsa 2.25 milidetik untuk 180 derajat dan pulsa 1.5 milidetik untuk 90 derajat.Hal yang menarik dan unik dari Motor Servo adalah bahwa Motor Servo ini di kontrol dengan manggunakan pulsa. Dengan komputer atau pun dengan menggunakan rangkaian mikrokontroler, dapat dengan mudah mengontrol Motor Servo.
Rangkaian paling sederhana untuk mengontrol Servo adalah dengan menggunakan IC555. Tegangan yang diperlukan Motor Servo adalah 5 Volt.Motor servo terbagi dalam dua jenis Motor Servo yaitu Servo standar dan continous servo.
Servo standard adalah Motor Servo yang putarannya mermiliki batas maksimal dan minimum. Sedangkan continous servo putarannya tidak memiliki batas maksimal dan minimum. Standard servo memiliki 3 posisi utama yaitu posisi 0 derajat, posisi 90 derajat dan posisi 180 derajat. Sedangkan untuk Continuos servo dapat berputar secara penuh 360 derajat baik berputar searah putaran jarum jam ataupun juga yang berlawanan dengan arah putaran jarum jam, ditambah dengan posisi untuk berhenti.
Karena ada tiga buah posisi utama seperti yang dijelaskan diatas, maka di buatlah sebuah cara khusus untuk mengatur Motor Servo tersebut. Cara yang digunakan adalah dengan memberikan pulsa digital dengan lebar yang berbeda-beda.
Jika diberikan pulsa dengan lebar 1.5 milidetik maka Motor Servo akan berputar keposisi tengah 90 derajat. Pulsa dengan lebar 2.0 milidetik akan membuat poros Motor Servo menuju 180 derajat (posisi kanan). Sedangkan pulsa 1.0 ms akan membuat Motor Servo akan berputarmenuju 0 derajat (posisi kiri) dan pulsa tersebut dikirim kan sebanyak 50 kali perdetik.
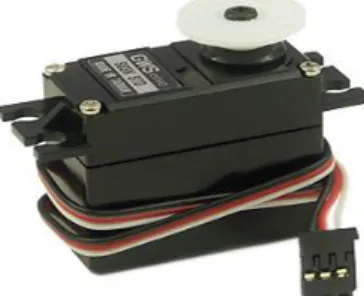
Berikut gambar Motor Servo.
Gambar 2.5. Motor Servo
Berikut bagian-bagian dari Motor Servo:
a. Konektor yang digunakan untuk menghubungkan Motor Servo dengan Vcc, Ground dan signal input yang dihubungkan ke Basic Stamp BS2P40.
b. Kabel menghubungkan Vcc, Ground dan signal input dari konektor ke Motor Servo.
c. Tuas menjadi bagian dari motor servo yang keliatan seperti suatu bintang fourpointed. Ketika motor servo berputar, tuas motor akan bergerak ke bagian yang dikendalikan sesuai dengan program.
d. Cassing berisi bagian untuk mengendalikan kerja motor servo yang pada dasarnya berupa motor DC. Bagian ini berkerja untuk menerima instruksi dari basic stamp dan mengkonversi ke dalam sebuah pulsa untuk menentukan arah / posisi servo.
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo.
Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰ . Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam).
Ketika lebar pulsa kendali telah diberikan, maka poros motor servo akan bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan eksternal yang mencoba memutar atau mengubah posisi tersebut, maka motor servo akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang dimilikinya (rating torsi servo). Namun motor servo tidak akan mempertahankan posisinya untuk selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms (mili detik) untuk menginstruksikan agar posisi poros motor servo tetap bertahan pada posisinya.
Jenis – jenis Motor Servo 1. Motor Servo Standar 180°
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari
kanan – tengah – kiri adalah 180°.
2. Motor Servo Continuous
Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu). Untuk menggunkan servo jenis Continous maka diperluka perhitungan tersendiri sebaga penentu
sudut ketika dibutuhkan. [8]
2.4 Running Text
Running text atau tulisan lampu berjalan adalah media elektronik yang membantu memudahkan untuk menyampaikan informasi. Running text umumnya terdiri atas beberapa LED yang disusun sedemikian rupa sehingga dapat menampilkan karakter-karakter dari informasi yang akan disampaikan. Aplikasi teks berjalan ini sangat bermanfaat untuk memberikan informasi. Running text yaitu berupa led-led yang disambung dan dirangkai menjadi deretan led ataupun dapat berupa dot matrix.
Dot matrix merupakan deretan led yang membentuk array dengan jumlah kolom dan baris tertentu, sehingga titik- titik yang menyala dapat membentuk suatu karakter angka, huruf, tanda baca.
2.4.1 Display 4 in 1 MAX7219 Dot Matrix
Led dot matriks display pada dasarnya adalah serangkaian LED yang
dihubungkan dalam baris dan kolom. Hal ini dilakukan untuk menghemat jumlah pin yang diperlukan untuk menyalakan tiap LEDnya.Sebagaimana contoh led dot matriks 8 x 8 (ditunjukan di bawah) memiliki 64 pin I/O untuk setiap piksel LED.
Dengan menghubungkan semua anode bersama di dalam beberapa baris (R1 hingga R8) dan katoda dalam satu kolom – kolom (C1 sampai C8), maka jumlah pin IO dapat direduksi menjadi hanya 16 pin. Setiap piksel LED dialamatkan oleh koordinat baris dan kolomnya. Pada gambar dibawah jika R4 diset logika 1 dan C3 diset logika 0, maka LED pada baris 4 kolom 3 akan menyala. Lalu bagaimana cara menampilkan banyak piksel secara bersamaan, seperti halnya untuk mengaktifkan sebuah alamat? Hal ini dilakukan dengan mendrive bergantian tiap alamat dengan sangat cepat sehingga mata anda akan melihatnya seolah – olah ia menyala secara bersamaan. Ada banyak cara untuk mengendalikan led dot matriks, masing – masing cara memiliki kelebihan dan kekurangannya, cara sederhana mendrive langsung dot
matrix dengan menggunakan ic Multiplexer. Namun pada tulisan saya ini saya akan menggunakan komunikasi SPI dengan menggunakan ic MAX 7219 sehingga jumlah pin input yang diperlukan bisa dipangkas menjadi hanya 5 pin (VCC, GND, DIN, CS, CLK). Berikut penampakanya dari modul LED dot matriks display yang saya gunakan pada tutorial ini.
MAX7219 Dot Matrix 4 In 1 Display Module adalah sebuah papan display yang disusun secara seri dari 4 buah 8 x 8 Dot Matrix dengan menggunakan IC kontroller MAX7219. Pada dasarnya MAX7219 merupakan sebuah IC Shift Register yang khusus dirancang untuk mengontrol Dot Matrix, 7 Segment maupun independen LED.
1 buah IC MAX7219 bisa digunakan untuk mengontrol : 1. 1 buah Dot Matrix 8 x 8
2. 8 buah 7 Segment 3. 64 independen LED
Gambar 2.6 Display 4 in 1 MAX7219 Dot Matrix
Oleh karena menggunakan mekanisme Shift Register tersebut maka IC MAX7219 hanya menggunakan 3 pin input untuk mengontrol ketiga display diatas, yaitu : D IN, CS dan CLK disamping tentunya VCC dan GND.
Untuk mempelajari lebih detail terkait pin out dan cara kerja dari IC MAX7219, sehingga anda bisa membuat atau design sendiri atau custom display Dot Matrix maupun 7 Segment sesuai kebutuhan atau project.
2.4.2 Spesifikasi Display 4 in 1 MAX7219 Dot Matrix
Berikut adalah spesifikasi dari modul display Dot Matrix MAX7219 4 In 1 : 1. Tegangan Operasi : 5V
2. Terdiri dari 4 buah Dot Matrix 8 x 8 yang tersusun secara seri.
3. Menggunakan IC kontroller MAX7219
4. Dimensi / ukuran : 12.8 cm x 12.8 cm x 1.3 cm 2.4.3 Hardware Yang di Butuhkan.
Hardware yang diperlukan pada contoh program modul Dot Matrix MAX7219 4 In 1 dengan Arduino pada tutorial ini antara lain :
1. Modul Dot Matrix MAX7219 4 In 1
2. Arduino UNO / Arduino Nano / Arduino Pro Mini atau lainnya
3. Beberapa kabel jumper M-F / F-F [3]
2.5 Power Supply Adaptor (PSA)
Adaptor adalah sebuah perangkat berupa rangkaian elektronika untuk mengubah tegangan listrik yang besar menjadi tegangan listrik lebih kecil, atau rangkaian untuk mengubah arus bolak-balik (arus AC) menjadi arus searah (arus DC). Adaptor / power supplay merupakan komponen inti dari peralatan elektronik.
Adaptor digunakan untuk menurunkan tegangan AC 22 Volt menjadi kecil antara 3 volt sampai 12 volt sesuai kebutuhan alat elektronika. Terdapat 2 jenis adaptor berdasarkan sistem kerjanya, adaptor sistem trafo step down dan adaptor sistem switching.
Dalam prinsip kerjanya kedua sistem adaptor tersebut berbeda, adaptor stepdown menggunakan teknik induksi medan magnet, komponen utamanya adalah kawat email yang di lilit pada teras besi, terdapat 2 lilitan yaitu lilitan primer dan lilitan skunder, ketika listrik masuk kelilitan primer maka akan terjadi induksi pada kawat email sehingga akan teerjadi gaya medan magnet pada teras besi kemudian akan menginduksi lilitan skunder.
Sedangkan sistem switching menggunakan teknik transistor maupun IC switching, adaptor ini lebih baik dari pada adaptor teknik induksi, tegangan yang di keluarkan lebih stabil dan komponennya suhunya tidak terlalu panas sehingga mengurangi tingkat resiko kerusakan karena suhu berlebih, biasanya regulator ini di gunkan pada peralatan elektronik digital.
2.7 Gambar Adaptor.
Catu daya atau power supply adaptor adalah sebuah peralatan penyedia tegangan atau sumber daya untuk peralatan elektronika dengan prinsip mengubah tegangan listrik yang tersedia dari jaringan distribusi transmisi listrik menuju level yang diinginkan sehingga berimplikasi pada pengubahan daya listrik. Dalam sistem pengubahan daya. Jika suatu catu daya bekerja dengan beban maka terdapat keluaran tertentu dan jika beban tersebut dilepas maka tegangan keluar akan naik, persentase kenaikan tegangan dianggap sebagai regulasi dari catu daya tersebut. Regulasi adalah perbandingan perbedaan tegangan yang terdapat pada tegangan beban penuh. Agar tegangan keluaran catu daya lebih stabil, dapat digunakan suatu komponen IC regulator. misalnya IC Regulator 7812 atau IC Regulator 7805. [7]
2.6 Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hamper sama dengan Loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi electromagnet, kumparan tadi akan tertarik ke dalam atau keluar tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan
sebagai indicator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah
alat (alarm). [6]
Gambar 2.8 Buzzer
BAB III
PERANCANGAN DAN PEMBUATAN SISTEM 3.1 Metodologi Perancangan
3.1.1 Tahap Persiapan
Adapun komponen yang digunakan dalam pembuatan alat tugas akhir ini yaitu:
1. Mikrokontroler ATmega328
ATMega 328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang dimana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer). Pada alat ini, Mikrokontroler ATmega328 berfungsi sebagai pusat pengendali seluruh cara kerja dari sistem alat ini.
2. Sensor Inframerah
Sensor yang digunakan disini adalah sensor Inframerah tipe E18-D80NK.
Sensor infrared tipe E18-D80NK adalah sensor untuk mendeteksi ada atau tidaknya suatu objek. Bila objek berada di depan sensor dan dapat terjangkau oleh sensor maka output rangkaian sensor akan berlogika “1” atau “high” yang berarti objek “ada”. Sebaliknya jika objek berada pada posisi yang tidak terjangkau oleh sensor maka output rangkaian sensor akan bernilai “0” atau
“low” yang berarti objek “tidak ada”. Jarak deteksi modul ini dapat diatur mulai dari jarak 3 cm – 80 cm.
Jumlah sensor yang digunakan sebanyak 2 buah sensor, yaitu sensor inframerah 1 dan sensor inframerah 2. Dimana sensor inframerah 1 berfungsi untuk mendeteksi kereta api ketika lewat. Dan sensor inframerah 2 berfungsi untuk mendeteksi kereta api sudah lewat.
3. Running Text
Running text atau tulisan lampu berjalan adalah media elektronik yang membantu memudahkan untuk menyampaikan informasi. Running text umumnya terdiri atas beberapa LED yang disusun sedemikian rupa sehingga dapat menampilkan karakter-karakter dari informasi yang akan disampaikan.
Aplikasi teks berjalan ini sangat bermanfaat untuk memberikan informasi.
Running text yaitu berupa led-led yang disambung dan dirangkai menjadi deretan
led ataupun dapat berupa dot matrix.
Dot matrix merupakan deretan led yang membentuk array dengan jumlah kolom dan baris tertentu, sehingga titik- titik yang menyala dapat membentuk suatu karakter angka, huruf, tanda baca.
Jenis running text yang digunakan disini adalah running text Display 4 in 1 MAX7219 Dot Matrix. MAX7219 Dot Matrix 4 In 1 Display Module adalah sebuah papan display yang disusun secara seri dari 4 buah 8 x 8 Dot Matrix dengan menggunakan IC kontroller MAX7219. Pada dasarnya MAX7219 merupakan sebuah IC Shift Register yang khusus dirancang untuk mengontrol Dot Matrix, 7 Segment maupun independen LED.
4. Power Supply
Catu daya atau power supply adaptor adalah sebuah peralatan penyedia tegangan atau sumber daya untuk peralatan elektronika dengan prinsip mengubah tegangan listrik yang tersedia dari jaringan distribusi transmisi listrik menuju level yang diinginkan sehingga berimplikasi pada pengubahan daya listrik.
Dalam sistem pengubahan daya. Jika suatu catu daya bekerja dengan beban maka terdapat keluaran tertentu dan jika beban tersebut dilepas maka tegangan keluar akan naik, persentase kenaikan tegangan dianggap sebagai regulasi dari catu daya tersebut. Regulasi adalah perbandingan perbedaan tegangan yang terdapat pada tegangan beban penuh. Agar tegangan keluaran catu daya lebih stabil, dapat digunakan suatu komponen.
Dalam sistem pengubahan daya jika suatu catu daya bekerja dengan beban maka terdapat keluaran tertentu dan jika beban tersebut dilepas maka tegangan keluar akan naik, persentase kenaikan tegangan dianggap sebagai regulasi dari catu daya tersebut. Regulasi adalah perbandingan perbedaan tegangan yang terdapat pada tegangan beban penuh. Agar tegangan keluaran catu daya lebih stabil, dapat digunakan suatu komponen IC regulator. misalnya IC Regulator 7812 atau IC Regulator 7805.
5. Motor Penggerak
Motor servo adalah motor yang mampu bekerja dua arah CW (Clock Wise) dan CCW (Counter Clock Wise) dimana arah dan sudut pergerakan rotornya dapat dikendalikan hanya dengan memberikan pengaturan duty cycle sinyal
PWM pada bagian pin kontrolnya. Servo biasa digunakan untuk steering/kemudi pada pesawat atau mobil RC, untuk lengan robot, untuk pengarah sensor dan untuk keperluan lain yang membutuhkan gerakan. Servo dapat digerakkan dengan mengirimkan pulsa tegangan 5V DC yang diulang setiap 20 milidetik.
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰ . Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam).
3.1.2 Tahap Pembuatan Sistem 3.1.2.1 Perancangan PCB
Perancangan PCB (Printed Circuit Board) dilakukan bersama dengan perancangan tata letak komponen. Proses ini sangat erat kaitannya dengan pola PCB.
Dalam merancang tata letak komponen dan pembuatan jalur, perlu diperhatikan hal hal berikut ini:
a. Letakkan komponen yang rapi dan simetris.
b. Menghindari sudut atau belokan yang tajam agar jalur tidak mudah mengelupas.
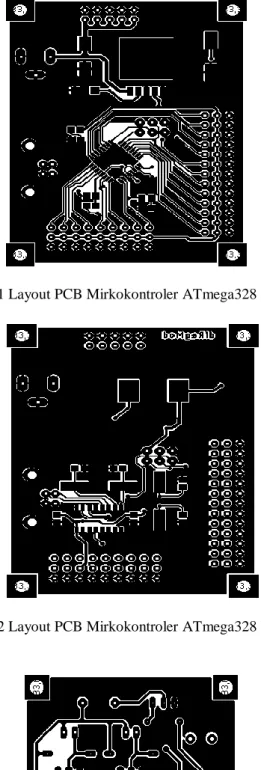
Dalam merancang PCB pada tugas akhir ini digunakan Eagle 7.1.0. software ini digunakan untuk memberikan kemudahan dalam merancang rangkaian dan layout PCB. Langkah pertama untuk membuat PCB adalah menggambar rangkaian. Untuk menggambar rangkaian dibutuhkan ketelitian dalam menghubungkan kaki kaki dari komponen.
Gambar 3.1 Layout PCB Mirkokontroler ATmega328 Atas
Gambar 3.2 Layout PCB Mirkokontroler ATmega328 Bawah
Gambar 3.3. Layout Rangkaian Motor Servo dan Buzzer
3.1.2.2 Pemeriksaan dan Perbaikan PCB
Tahapan tahapan dalam pemeriksaan dan perbaikan jalur PCB adalah sebagai berikut:
a. Menghubungkan jalur PCB yang putus dengan menggunakan kabel atau melapisinya dengan timah.
b. Memotong dan memisahkan jalur PCB yang mengalami hubungan singkat dengan jalur lain dengan menggunakan cutter.
3.1.2.3 Penyolderan Komponen
Menyolder adalah proses membuat sambungan logam secara listrik dan mekanis menggunakan logam tertentu (timah) dengan menggabungkannya dengan alat khusus (solder). Alat ini berfungsi untuk memanaskan sambungan pada suhu tertentu. Solder memiliki sebuah elemen pemanas yang menghasilkan panas. Hal hal yang perlu diperhatikan dalam penyolderan komponen adalah sebagai berikut:
a. Waktu dan suhu penyolderan jangan sampai merusak komponen yang akan disolder.
b. Kematangan timah pada titik sambung diusahakan sebaik mungkin sehingga tidak mempengaruhi kerja rangkaian.
3.2 Perancangan Sistem 3.2.1 Diagram Blok
Untuk mempermudah perancangan sistem diperlukan sebuah diagram blok sistem yang mana tiap blok mempunyai fungsi dan cara kerja tertentu. Adapun diagram blok darisistem yang dirancang adalah sebagai berikut :
Gambar. 3.4 Diagram Blok Sistem
Program diawali dengan pengecekan logika pada sensor kanan luar. Jika sensor ini menerima logika 0 yang berarti kereta api ada yang akan lewat maka mikrokontroler segera mengirimkan logika agar motor servo menutup palang di ikuti dengan muncul nya tampilan pada running text dan bunyi buzzer. Demikian juga jika sensor kanan dalam menerima logika 0 yang berarti seluruh badan kereta api sudah lewat maka mikrokontroler mengirimkan logika agar motor servo sehingga membuka palang palangdisertai dengan tampilan running text , silahkan lewat dan di bunyi buzzerberhenti.
POWER SUPPLY
SENSOR INFRAMERAH 2
SENSOR INFRAMERAH 1
MIKROKONT ROLLER ATMEGA 328
RUNNING TEXT
MOTOR PENGGERAK
BUZZER
3.2.2 Perancangan Rangkaian
3.2.2.1 Perancangan Rangkaian Mikrokontroler ATMega328
Rangkaian ini merupakan otak dari alat yang dibuat. Rangkaian ini menggunakan mikrokontroler ATMega328 sebagai pusat dari pemrosesan data.
Berikut gambar rangkaian yang digunakan pada alat ini:
Gambar 3.5 Rangkaian Mikrokontroler ATMega328
Rangkaian ini terbagi atas 2 bagian utama, yaitu rangkaian minimum mikrokontroler ATMega328 dan rangkaian komunikasi mikrokontroler. Rangkaian minimum mikrokontroler terdiri dari rangkaian Reset yang dibentuk oleh R1, dan kemudian rangkaian pembangkit clock yang terdiri dari kristal Q1 dan 2 buah kapasitor C1 dan C2. Konektor J1 digunakan sebagai jalur pengisian bootloader mikrokontroler. C3 digunakan sebagai filter tegangan yang masuk ke mikrokontroler. LED1 diperulkan sebagai indikator ada atau tidaknya tegangan pada mikrokontroler Ketika sudah dihubungkan ke power supply. LED2 digunakan sebagai sarana pengujian rangkaian ketika rangkaian sudah dibuat. Bagian lainnya adalah bagian komunikasi. Rangkaian ini digunakan sebagai jalur untuk memasukkan program ke memori mikrokontroler.
Rangkaian ini dibangun dari IC CH340G yang merupakan konverter komunikasi USB Ini diperlukan agar mikrokontroler yang hanya mempunyai fasilitas komunikasi serial UART-TTL dapat berkomunikasi dengan PC yang mempunyai fasilitas port USB. Sebagai pembangkit clock pada rangkaian komunikasi ini, digunakan kristal Q2, dan C4, C5.
3.2.2.2 Perancangan Rangkaian Power Supply
Berikut merupakan rangkaian power supply yang digunakan pada alat ini:
Gambar 3.6 Rangkaian Power Suplly
Agar alat dapat digunakan, maka dibutuhkan sebuah catu daya yang memberikan daya pada seluruh rangkaian. Sensor, display dan mikrokontroler umumnya menggunakan tegangan 5V DC agar dapat bekerja. Untuk itu dibangun sebuah system power supply yang mempunyai output 5V DC.
Rangkaian ini dibangun dari IC LM2576 yang merupakan ic converter penurun tegangan. Rangkaian jenis ini dipilih karena lebih efisien dibanding dengan linear regulator biasa. LM2576 merupakan IC regulator switching yang mampu memberikan arus 3A pada tegangan 5V. Regulator jenis ini hanya memerlukan sedikit komponen tambahan untuk dapat dioperasikan.
3.2.2.3 Perancangan Rangkaian Sensor Inframerah E18-D80NK
Modul sensor inframerah E18-D80NK adalah modul sensor jarak yang menggunakan inframerah sebagai media deteksisensornya. Modul ini akan mendeteksi pantulan sinar inframerah termodulasi yang dipancarkannya. Modul iniakan menghasilkan logika Low (0) pada pin outputnya jika sensor mendapatkan pantulan sinar inframerah. Dan menghasilkan logika High (1) pada saat tidak