© 2019*Corresponding author:[email protected]
ISBN: 978-602-53491-6-4 DOI: 10.21063/PIMIMD5.2019.13
PERANCANGAN MODEL BIONIC ARM 3 DEGREE OF FREEDOM SEBAGAI PROSTHETIC LIMB PADA BAGIAN LENGAN
Nofri Wahyu Candra*& Thorikul Huda
Program Studi Teknik Elektro, Institut Teknologi Kalimantan, Balikpapan 76127, Indonesia Abstrak
Kinematika merupakan pengetahuan atau teori tentang pergerakan objek tanpa memperhitungkan gaya- gaya yang menyebabkan benda itu bergerak. Dalam mengontrol derajat kebebasan dari bionic arm dapat dilakukan dengan menggunakan salah satu dari dua metode diantaranya inverse kinematics dan forward kinematics. Namun, saat ini kebanyakkan desain manipulator sedarhana, biasanya terdiri atas satu dari lima konfigurasi dasar. Hal yang sulit dari masalah inverse kinematics hingga saat ini yaitu pada bagian desain manipulatornya. Secara umum, kompleksitas masalah inverse kinematis meningkat dengan jumlah parameter joint yang tidak sama dengan nol. Pada inverse kinematics selalu memiliki banyak solusi, sedangkan pada forward kinematics hanya memiliki satu solusi. Oleh karena itu, penulisan makalah ini bertujuan untuk merancang model bionic arm 3 degree of freedom sebagai prosthetic limb pada bagian lengan. Tahap perancangan dimulai dengan menentukan parameter model, lalu parameter tersebut dimodelkan ke dalam sistem gerak dengan menggunakan metode inverse kinematics. Pemodelan dari metode inverse kinematics disimulasikan dengan software MATLAB untuk kemudian diimplementasikan dalam bentuk prototipe secara menyeluruh terhadap desain 3D yang dirancang. Pengujian modelling sistem gerak bionic arm dengan koordinat (45, 25, 30) didapatkan nilai ( yaitu sebesar (61,
7
- , 37). Pengujian modelling sistem gerak bionic arm dengan koordinat (-15, 30, 5) didapatkan nilai ( yaitu sebesar (-45, 0 , 34 ).
Kata kunci: bionic arm, inverse kinematics, and prototipe
PENDAHULUAN
Hingga saat ini, masalah cacat fisik merupakan hal yang tidak lazim ditemui di belahan dunia manapun. Hal ini, tentu membawa komplikasi tersendiri bagi para penyandang cacat fisik.
Sesuia dengan amanah pemerintah yang tertuang dalam peraturan pemerintah (PP) Nomor 43 tahun 1998 mengenai upaya peningkatan kesejateraan sosial penyandang cacat (Peraturan Pemerintah Nomor 43 tahun 1998). Oleh karena itu, dipilihlah bionic arm sebagai solusi alternative bagi penyandang cacat fisik yang disebabkan oleh kecelakaan, perang maupun bawaan sejak lahir. Khususnya dibagian lengan sebagai bentuk realisasi dari kebijakan pemerintah tersebut. Derajat kebebasan dari bionic arm dapat dikontrol dengan menggunakan salah satu dari metode diantaranya inverse kinematics dan forward kinematics. Pada forward kinematics merupakan memberikan nilai input pada setiap sudut motor servo dan mendapatkan posisi end-effector, sedangkan pada inverse kinematics memberikan masukan berupa posisi end- effector sesuai dengan posisi yang diinginkan [1]. Perhitungan inverse kinematics jauh lebih mudah dibandingkan dengan forward kinematics. Pada inverse kinematics memiliki banyak solusi, sedangkan pada forward kinematics selalu memiliki satu solusi. Bisa atau tidaknya metode perhitungan inverse kinematics untuk memberikan solusi tergantung pada desain dan kontruksi dari robot itu sendiri [2]. Hal yang sulit dari masalah inverse kinematics hingga saat ini yaitu pada bagian design manipulatornya. Secara umum, kompleksitas dari masalah inverse kinematics yaitu meningkatnya jumlah parameter joint yang tidak sama dengan nol [2].
Berdasarkan keunggulan dari rancangan dan permodelan sistem gerak dengan metode inverse kinematics, maka makalah ini membahas mengenai perancangan model dan sistem gerak bionic arm 3 degree of freedom (DOF) dengan metode inverse kinematics.
METODE PENELITIAN
Tahap desain dimulai dengan menentukan parameter model, modelling sistem gerak dengan metode inverse kinematics dan desain prototipe model 3D dengan menggunakan software SolidWorks. Setelah semua parameter yang diperlukan telah ditentukan, modelling
sistem gerak inverse kinematics akan disimulasikan menggunakan software MATLAB untuk kemudian diimplementasikan dalam bentuk prototipe secara menyeluruh terhadap desain 3D yang dirancang.
Parameter Model
Parameter model tersebut terdiri batasan gerak tiap joint, panjang joint dan titik referensi tiap joint. Pada robot bionic arm yang dirancang menggunakan sistem 3 derajat kebebasan (DOF) yang menyerupai lengan manusia. Untuk dimensi dari bionic arm yang digunakan dapat dilihat pada Tabel 1.
Tabel 1: Dimensi robot yang didesain
Bagian Dimensi
(cm)
Base 0
Lengan 0
Lengan 30
Lengan 25
Sumber : Penulis, 2019
Pergerakan dari setiap joint dibatasi untuk mengurangi pergerakan yang dirasa tidak perlu dan tidak mungkin dilakukan oleh lengan manusia atau dalam istilah kedokteran disebut Range of Motion (ROM). Batasan pergerakan sudut dapat dilihat pada Tabel 2.
Tabel 2: Range pergerakan sudut
Joint Range Sudut
(º)
-50 180
-50 180
0 160
Sumber : Penulis, 2019 Modelling Sistem Gerak Inverse Kinematics
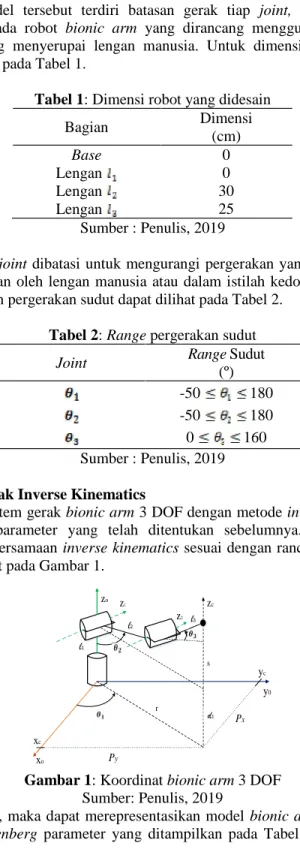
Permodelan sistem gerak bionic arm 3 DOF dengan metode inverse kinematics dengan mengggunakan nilai parameter yang telah ditentukan sebelumnya. Pada tahap ini akan menghasilkan berupa persamaan inverse kinematics sesuai dengan rancangan modelling sistem gerak yang dapat dilihat pada Gambar 1.
Gambar 1: Koordinat bionic arm 3 DOF Sumber: Penulis, 2019
Berdasarkan Gambar 1, maka dapat merepresentasikan model bionic arm 3 degree of freedom ke dalam denavit-hartenberg parameter yang ditampilkan pada Tabel 3, kemudian parameter
y0
yc
zc
xc
xo
zo
l1
d1
l2 l3
r
s
z1
z2
Py
Px
yang didapatkan dimasukan ke dalam persamaan 1, 2, dan 3. Tiap joint ditetapkan menggunakan prinsip kaidah denavit-hartenberg agar lebih mudah melakukan simulasi modelling bionic arm dalam bentuk GUI MATLAB.
Tabel 3: Denavit-Hertenberg Parameter
Joint a
1 0 90
2 0 0
3 0 0
Sumber : Penulis, 2019 Keterangan Tabel 3:
a = Jarak dari sampai (cm)
= Perpindahan sudut terhadap sumbu ( )
= Jarak dari sampai (cm)
= Rotasi sumbu terhadap sumbu ( )
Untuk menentukan persamaan model matematis tiap joint yang diperlukan dalam modelling sistem gerak, digunakan persamaan 1, 2, dan 3. maka didapatkan posisi , dan persamaan 1, 2, dan 3 yang biasa disebut persamaan model matematis dari forward kinematics.
= …...(1
)
= ……....(2
)
= ....(3
) Keterangan persamaan (1-3):
= Posisi koordinat sumbu x
= Posisi koordinat sumbu y
= Posisi koordinat sumbu z
= Panjang lengan 1 (cm)
= Panjang lengan 2 (cm)
= Panjang lengan 3 (cm)
Setelah persamaan forward kinematics diperoleh, maka tahap selanjutnya yaitu dapat menghitung persamaan inverse kinematics berdasarkan geometri model inverse. Untuk permodelan sistem yang digunakan yaitu konfigurasi lengan kiri manipulator. Konfigurasi lengan kiri manipulator dilihat pada Gambar 2.
r
a
yo Py
Px xo
Gambar 2: Proyeksi planar sumbu X-Y Sumber: Penulis, 2019
Berdasarkan konfigurasi lengan kiri pada Gambar 2, maka diperoleh nilai dengan metode trigonometri (tangent function). Nilai dapat dihitung melalui persamaan 4, 5, 6 dan 7 yaitu:
….………...(4)
……….…...(5)
……….…...(6)
...(7)
Perhitungan dilanjutkan dengan mencari nilai dapat diketahui dengan metode trigonometri (tangent function) yang ditampilkan pada Gambar 3, maka didapatkan perhitungan nilai melalui persamaan 8 dan 9 yaitu: …...(8)
.…...(9)
s r zo Xo l2 l3 Gambar 3: Proyeksi Planar sumbu X-Z Sumber: Penulis, 2019 Perhitungan dilanjutkan dengan mencari nilai 3dengan menggunakan persamaan 10 yaitu: ………...(10)
Nilai sin 3dan cos 3yang dapat dihitung menggunakan persamaan 11 dan 12 yaitu: ……….…(11)
…..(12)
Setelah persamaan inverse kinematics diperoleh, maka tahap selanjutnya yaitu validasi data.
Jika hasil yang didapatkan sesuai dengan intruksi yang diinginkan, maka dilanjutkan ke pembuatan desain 3D dengan software SolidWorks. Namun, jika sebaliknya, maka akan dilakukan pengecekkan ulang dengan mengevaluasi nilai dari parameter model dan memodelkan ulang sistem geraknya. Selanjutnya, dilakukan perhitungan ulang hingga didapatkan hasil desain 3D dan sistem gerak yang diinginkan.
Desain Dan Simulasi 3d Dengan Software
Tahap ini dilakukan desain 3D sesuai dengan parameter dan modellling sistem gerak dengan inverse kinematics yang telah ditentukan sebelumnya. Perancangan menggunakan bantuan software SolidWorks dan MATLAB untuk melakukan simulasi secara menyeluruh berdasarkan desain 3D yang telah dirancang dapat menghasilkan nilai sudut dari tiap DOF dengan acuan titik koordinat sesuai dengan intruksi yang diinginkan.
HASIL PENELITIAN
Proses simulasi dengan software MATLAB dilakukan dengan beberapa tahap. Simulasi dimulai dengan memasukkan nilai koordinat (x, y, z) yang telah ditentukan. Sebagaimana dijelaskan dalam sub-bagian 5, hasil simulasi dibandingkan dengan hasil perhitungan yang berdasarkan dari range pergerakkan sudut. Hasil analisis yang digunakan untuk menarik kesimpulan.
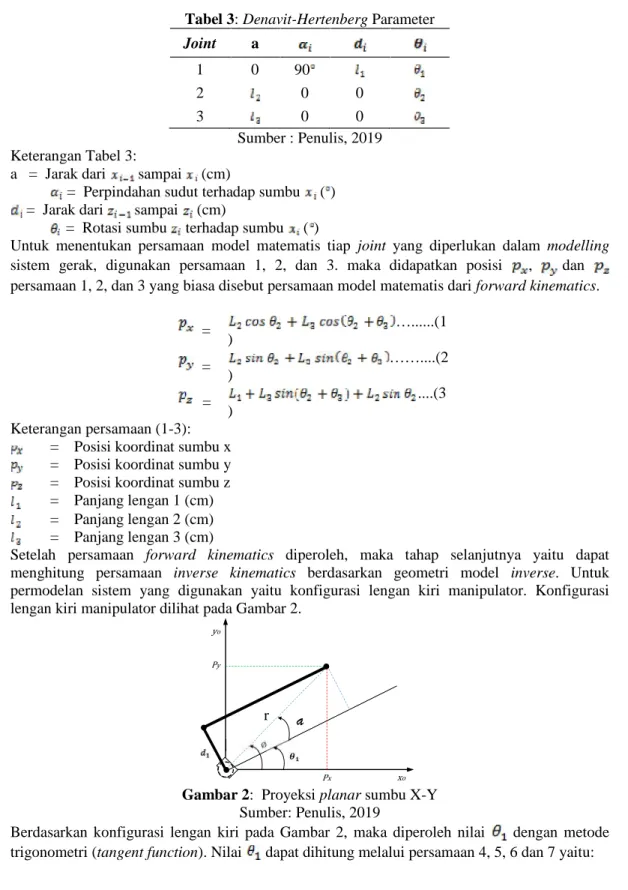
Analisis Output Inverse Kinematics Kasus 1 Koordinat (45, 25, 45)
Perhitungan inverse kinematics dengan masukan nilai x, y, z yang berbeda dengan koordinat yaitu 45, 25 dan 45. Maka dapat dihitung dengan persamaan 7, 9 dan 10 yaitu:
2 2 2 1
1 1
0 - 25 45 , 0
) 25 , 45 ( tan θ tan
61 0 61 θ1
) 0.6 1 , 6 . 0
( 2
3 tan1
-
θ
3 37 θ
30 25(0.6),25(0.8)
0 45 , 25 45
1
2 2 1 2
tan θ tan
59 66 7
θ2
Perhitungan inverse kinematics didapatkan nilai ( yaitu sebesar (61,-7,37). Jika dilihat pada Tabel 3.1 output dari hasil perhitungan inverse kinematics pada koordinat (45, 25, 30) tampak tidak melebihi range sudut yang telah ditentukan. Sehingga dapat disimpulkan bahwa pada koordinat (45, 25, 30) termasuk dalam keadaan normal. Gambar 4 tampak hasil perhitungan tidak melebihi range sudut bionic arm. Karena, diasumsikan bahwa base bionic arm berada pada titik 0 pada sumbu x, y, z.
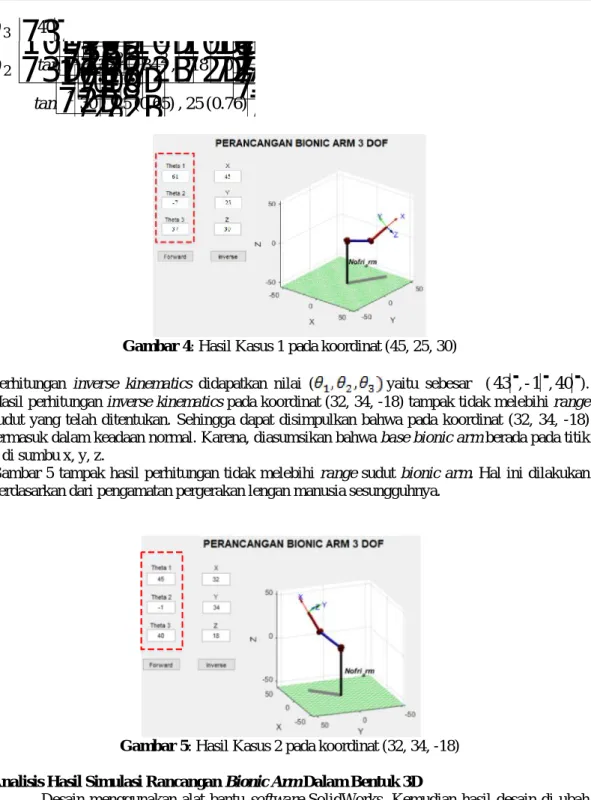
Analisis Output Inverse Kinematics Kasus 2 Koordinat (32, 34, -18)
Perhitungan inverse kinematics dengan masukan nilai x, y, z yang berbeda dengan koordinat yaitu 32, 34 dan -18. Maka dapat dihitung dengan persamaan 7, 9 dan 10 yaitu:
2 2 2 1
1 1
0 - 34 32 , 0
) 34 , 32 ( tan θ tan
43 0 43
θ1
) 0.65 1 , 65 . 0
( 2
3 tan1
-
θ
3 40 θ
30 25(0.65),25(0.76)
0 18 , 34 32
1
2 2 1 2
tan θ tan
Gambar 4: Hasil Kasus 1 pada koordinat (45, 25, 30)
Perhitungan inverse kinematics didapatkan nilai ( yaitu sebesar (43,-1,40).
Hasil perhitungan inverse kinematics pada koordinat (32, 34, -18) tampak tidak melebihi range sudut yang telah ditentukan. Sehingga dapat disimpulkan bahwa pada koordinat (32, 34, -18) termasuk dalam keadaan normal. Karena, diasumsikan bahwa base bionic arm berada pada titik 0 di sumbu x, y, z.
Gambar 5 tampak hasil perhitungan tidak melebihi range sudut bionic arm. Hal ini dilakukan berdasarkan dari pengamatan pergerakan lengan manusia sesungguhnya.
Gambar 5: Hasil Kasus 2 pada koordinat (32, 34, -18) Analisis Hasil Simulasi Rancangan Bionic Arm Dalam Bentuk 3D
Desain menggunakan alat bantu software SolidWorks. Kemudian hasil desain di ubah ke dalam format STL dengan tujuan agar hasil desain yang dibuat dalam bentuk prototipe model dari robot bionic arm 3 DOF.
l1
l2 l3
Base
25cm30cm
0 cm
l1
l2 l3
Base
25cm30cm
0 cm
(a) (b)
Gambar 6: Desain bionic arm 3 DOF (a) Simulasi 3D dan (b) Prototipe model (hardware)
Sumber: Penulis, 2019 KESIMPULAN
Berdasarkan hasil perancangan model bionic arm 3 DOF, maka dapat diperoleh beberapa kesimpulan, yaitu:
1. Perancangan bionic arm dilalukan melalui tahap penentuan parameter, modelling sistem gerak dengan metode inverse kinematics seperti pada persamaan (7), (9), (10), dan desain prototipe model 3D.
2. Pada kasus 1 dangan koordinat (45, 25, 30) didapatkan nilai ( yaitu sebesar (61,-7,37)mampu melakukan pergerakan tidak melebihi batas range yang telah ditentukan.
3. Pada kasus 2 dangan koordinat (45, -45, 30) didapatkan nilai ( yaitu sebesar (43,-1,40) mampu melakukan pergerakan tidak melebihi batas range yang telah ditentukan.
4. Pada penelitian selanjutnya, perlu ditambahkan aspek dinamika dan trajectory pada sistem gerak bionic arm.
DAFTAR PUSTAKA
[1] Hossein, S. L. and Hassan, M. B. (2014) Modelling, Simulation and Position Control of 3 DOF Articulated Manipulator. International Journal on Electrical Engineering and Informatics, Vol 2, No. 3, 132-140.
[2] Spong, M. W., S. Hutchinson, and Vidyasagar, M. (2006) Robot Dynamics and Control.
New York: John Wiley & Sons. Inc.
[3] Craig, J. J. (2005) Introduction to Robotics Mechanics and Control. Prentice Hall, United State of America.
[4] Koivo, A. J. (1989) Fundamentals for Control of Robotic Manipulators. New York:
John Wiley & Sons. Inc.
[5] Peter, I. Corke (2011) Robotics, Vision & Control: Fundamental Algorithms in MATLAB. Springer. ISBN 978-3-642-20143-1.