SKRIPSI
Diajukan Oleh :
Shofyan Arif
0734010033
JURUSAN TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
JAWA TIMUR
i
Puji syukur atas ke hadirat Tuhan Yang Maha Esa atas segala limpahan
Karunia-Nya sehingga dengan segala keterbatasan waktu, tenaga dan pikiran yang
dimiliki penyusun, akhirnya penyusun dapat menyelesaikan Skripsi dengan judul
“ Penggunaan Metode Discrete Wavelet Transform dan Hybrid Untuk Kompresi Video Data Biomedika “ dengan tepat waktu.
Skripsi ini merupakan syarat akademis yang harus dipenuhi oleh
mahasiswa jurusan Teknik Informatika UPN “Veteran” Jawa Timur Surabaya.
Dalam penulisan laporan skripsi ini penulis menyadari telah mendapatkan
banyak bantuan dari berbagai pihak baik segi moril maupun materiil. Oleh karena
itu pada kesempatan ini penulis ingin mengucapkan terima kasih yang
sebesar-besarnya kepada :
1) Bapak Prof. Dr. Ir. Teguh Soedarto, MP, Rektor Universitas Pembangunan
Nasional “Veteran” Jawa Timur Surabaya.
2) Bapak Ir. Sutiyono, MT, selaku Dekan Fakultas Teknologi Industri
Universitas Pembangunan Nasional “Veteran” Jawa Timur Surabaya.
3) Bapak Basuki Rahmat, Ssi, MT selaku Ketua Jurusan Teknik Informatika
Universitas Pembangunan Nasional “Veteran” Jawa Timur Surabaya.
4) Bapak Basuki Rahmat, Ssi, MT dan Bapak Agus Hermanto, S.Kom selaku
dosen pembimbing penulis di jurusan Teknik Informatika Universitas
5) Untuk Keluarga tersayang ( Papa, Mama, Kaka, Aurel, Mas didi ) yang
telah memberikan dukungan, doa, cinta, dan kasih sayang dan semua
pengorbanan yang beliau berikan.
6) Untuk Keluarga besar H.Atotie Boekti yang telah memberikan doa serta
panutan untuk penulis pribadi.
7) Yang spesial untuk Wisma A. Merta,S.kom yang selama ini memberi
bimbingan, dukungan dan semangat yang sangat besar dalam pengerjaan
skripsi ini.
8) Teman-teman penulis : Untuk Teman-teman seangkatan, Juzz, Shasa,
Cicik, Tobib, Faisol, Gibran, Gigih, Nophan, Rizal, mas Aziz dan semua
teman yang berjasa atas dukungannya dan semua pihak yang tidak
mungkin penulis sebutkan namanya satu per satu terima kasih telah
membantu penulis untuk menyelesaikan skripsi ini.
Penulis menyadari bahwa dalam penulisan laporan skripsi ini masih
banyak kekurangan nya. Oleh sebab itu penulis mengharapkan kritik dan saran
yang sifatnya membangun dari pembaca. Semoga laporan ini bermanfaat bagi
penulis dan para pembaca
Surabaya, 26 Nopember 2010
iii
Halaman
KATA PENGANTAR... i
ABSTRAK ... ... ii
DAFTAR ISI ... iii
DAFTAR GAMBAR... vi
DAFTAR TABEL ... viii
BAB I PENDAHULUAN... 1
1.1 Latar belakang... 1
1.2 Rumusan Masalah ... 2
1.3 Batasan Masalah ... 3
1.4 Tujuan Peneletian ... 3
1.5 Manfaat Penelitian ... 4
1.6 Metodologi Penelitian ... 4
1.7 Sistematika Penulisan ... 5
BAB II TINJAUAN PUSTAKA... 8
2.1 Perkembangan radio oline/ internet radio... ... 8
2.2 World Wide Web... ... 9
2.2.1 Sejarah World Wide Web ... 10
2.2.2 Cara kerja WWW... 11
2.2.3 Browser web... ... 12
2.2.4 Server web... ... 12
2.2.5 Hypertext Transfer Protokol (HTTP)... 13
2.2.6 Universal Resouce Locator(URL)... ... 13
2.2.7 Homepage... ... 14
2.3 Hyper Text Markup Language... ... 14
2.4 Pemrograman pada web... ... 15
2.5 Bahasa pemrograman PHP... 17
2.5.1 Konsep pemrograman PHP... 17
2.5.2 Perintah dasar PHP... 18
2.6.3 Koneksifitas PHP dan MySql... . 21
2.7 Apache Web Server... 23
2.8 Crontab... 25
2.8.1 Cara kerja crontab... .. 26
2.8.2 Contoh Crontab... .. 26
2.9 Lame Mp3... ... 27
2.10 Arecord... 27
BAB III ANALISA DAN PERANCANGAN SISTEM... 28
3.1 Analisa Sistem... 28
3.2 Perancangan Sistem... .. 29
3.3 Deskripsi sistem... ... 29
3.3.1 Skema Recording data audio ... 31
3.3.2 Workflow ... 33
3.3.3 CDM ... 38
3.3.4 PDM ... 39
3.3.5 Struktur Basis Data (database)... 39
3.4 Kebutuhan Perangkat Keras dan Perangkat Lunak... 42
BAB IV IMPLEMENTASI ... 44
4.1 Alat yang digunakan ... 44
4.1.1 Kebutuhan Perangkat Keras... 44
4.1.2 Kebutuhan Perangkat Lunak... 45
4.2 Implementasi Basis Data... 45
4.2.1 Struktur Database Tabel Admin... 46
4.2.2 Struktur Database Tabel Penyiar ... 46
4.2.3 Struktur Database Tabel Acara ... 47
4.2.4 Struktur Database Tabel Berita ... 47
4.2.5 Struktur Database Tabel Guestbook... 48
4.2.6 Struktur Database Tabel Profil... 48
4.2.7 Struktur Database Tabel Rekaman... 48
v
5.1 Lingkungan Uji coba...53
5.2 Pelaksanaan Uji coba perangkat lunak...55
5.2.1 Level Admin... 55
5.2.2 Level User...60
BAB VI PENUTUP...65
6.1 Kesimpulan... 65
6.2 Saran...65
DAFTAR GAMBAR
Gambar 3.1 Topologi Jaringan Radio Internet ... 27
Gambar 3.2 Skema Radio Online1 ... 30
Gambar 3.3 Skema Radio Online2 ... 30
Gambar 3.4 workflow pengolahan data acara... 32
Gambar 3.5 Workflow pengolahan data penyiar ... 33
Gambar 3.6 Workflow pengolahan data jadwal ... 34
Gambar 3.6 CDM... 36
Gambar 3.7 PDM ... 37
Gambar 4.1 Struktur Database tabel admin ... 43
Gambar 4.2 Struktur Database tabel penyiar ... 44
Gambar 4.3 Struktur Database tabel acara... 44
Gambar 4.4 Struktur Database tabel admin ... 44
Gambar 4.5 Tampilan menu form Home ... 45
Gambar 4.6 Tampilan menu form Profil... 46
Gambar 4.7 Tampilan menu form Crews ... 47
Gambar 4.8 Tampilan menu form Schedule ... 48
Gambar 4.9 Tampilan menu form Guestbook ... 48
Gambar 5.1 halaman login ... 52
Gambar 5.2 mengolah data profil ... 53
Gambar 5.3 uji coba edit data penyiar ... 54
Gambar5.4 form penambahan data penyiar ... 54
vii
Gambar5.8 Pengolahan data kontak... 57
Gambar5.9 Form profil radio ... 57
Gambar5.10 Form data penyiar ... 58
Gambar5.11 Tampilan jadwal siaran ... 59
Gambar5.12 Tampilan radio offline diputar ... 59
Gambar5.13 Form pengisian guestbook dan komentar ... 60
DAFTAR TABEL
Tabel 3.1 Quality of Services Streaming Audio ... 29
Tabel 3.2 Tabel Admin ... 37
Tabel 3.3 Tabel Penyiar ... 37
Tabel 3.4 Tabel Acara ... 38
ix
DAFTAR PUSTAKA
1. Gultom, Henry. 2008. Membuat Radio Online (Skema2). diakses online
November 2009 dari http://henry.gultom.or.id/index.php/
2. Padangsidimpuan. 2008. Audio Streaming di Ubuntu. diakses online
November 2009 dari http://shafwanhasby.22web.net/
3. Malindo. 2007. Blog Radio Streaming Malindo. diaskes online Oktober 2009
dari http://malindofm.blogspot.com/2009_10_04_archive.html
4. Gigih. 2009. Membuat Siaran Radio Sendiri dengan Icecat dan Winamp.
diakses November 2009 dari http://koegie.staff.fe.uns.ac.id/
5. Hendriyana F, Yulian. 2008. Icecast Audio Streamer. Diakses online
November 2009 dari http://yulian.firdaus.or.id/icecast.php
6. Syarif, Abdusi. 2008. Quality of Services (QoS) Teknologi Streaming untuk Apliaksi Surveillance. Jakarta: Teknik Informatika-Universitas
Mercu Buana.
7. Bonit, Nugrorho . 2004, PHP dan MySQL server dan HTML.
8. http://en.wikipedia.org/wiki/Real_Time_Streaming_Protocol 9. http://icecast.org/
PENDAHULUAN
1.1 Latar belakang
Perkembangan dunia robot saat ini telah banyak diterapkan didunia
industri untuk membantu proses produksi manual menjadi otomatis salah satunya
robot untuk menarik barang mengikuti garis, sebelum ada robot tersebut proses
produksi menggunakan tenaga manusia proses produksi tidak bisa maksimal.
Namun dengan adanya robot untuk menarik barang mengikuti garis ini masih
kurang maksimal karena masih bergantung pada garis untuk berjalan, jika garis
tersebut putus maka robot tidak dapat bekerja, maka perlu suatu robot yang dapat
berjalan dengan mengikuti cahaya sehingga proses produksi maksimal. Selain itu
robot pencari cahaya dapat juga diterapkan untuk menentukan titik cahaya
matahari yang pas, sehingga solar sel bekerja maksimal merubah energi panas
menjadi arus listrik. [2]
Saat ini kemajuan dunia elektronika sudah sedemikian pesat, saat ini sudah
dapat membuat chip komputer dalam sebuah keping tunggal (single chip
computer) atau yang sering disebut mikrokontroler yang hanya berukuran sangat
kecil (berukuran seperti IC Digital lepasan) telah dibenami dengan CPU (Central
Processing Unit), ROM (Read Only Memory), RAM (Random Access Memory)
dan I/O (Input/Output). Dimasa lalu masing-masing bagian tersebut merupakan
mikrokontroler setidaknya harus menggunakan empat buah IC terpisah, tapi
keadaan kini telah berubah. Dengan sebuah IC kecil dan tunggal telah dapat
dibuat sebuah sistem mikrokontroler yang utuh yang dapat dipakai untuk
mengontrol suatu alat tertentu [2]
1.2 Rumusan Masalah
Berdasarkan latar belakang tersebut, maka dapat diambil perumusan
masalah sebagai berikut:
a. Bagaimana merancang / mendesain robot berkaki yang bergerak
mengikuti arah cahaya center yang dibidik dengan menggunakan
mikrokontroler ATMEGA16 dengan hanya menggunakan 2 (dua) buah
servo HS-311 sebagai penggerak robot
b. Bagaimana memberikan perintah atau program kepada robot tersebut
agar bisa berjalan secara otomatis mengikuti arah dimana cahaya
senter tersebut dibidikkan
1.3 Batasan Masalah
Dalam penyusunan tugas akhir ini, untuk mengatasi permasalahan yang
ada maka penulis membatasi permasalahan sebagai berikut :
a. Robot ini menggunakan mickrokontroler ATMEGA16 dan
menggunakan Bahasa Pemrograman C sebagai operasional
mickrokontroler ATMEGA16 dengan dua buah servo seri HS-311
c. Setelah di Start, robot mulai dengan memutar 360o (tiga ratus enam
puluh derajat) ditempat. Bila sensor robot mendeteksi adanya cahaya
bidikan lampu senter, maka robot akan bereaksi dan berjalan kearah
dimana cahaya lampu senter itu dibidik
d. Robot tidak bisa menanggapi rangsangan, jika bidikan lampu senter
tersebut berada dibalik benda yang menutupi sensor cahaya robot
tersebut
e. Robot bergerak hanya sebatas gerak maju mengikuti arah cahaya
tersebut. Dan juga tidak bisa untuk menaiki atau menuruni tangga.
1.4 Tujuan Penelitian
Adapaun tujuan dari penelitian serta pembuatan robot berkaki tersebut
adalah untuk memenuhi Tugas Akhir di Universitas Pembangunan Nasional yang
dimana robot tersebut bisa bergerak jika menerima rangsangan cahaya, dan bisa
bergerak mengikuti cahaya tersebut, dibantu dengan sensor cahaya dan memiliki
kecerdasan buatan dengan Bahasa C yang bisa mengatur semua gerakan robot.
1.5 Manfaat Penelitian
Manfaat yang dapat diambil dari Tugas Akhir ini adalah diharapkan untuk
kedepannya semua tentang Robotika di Indonesia ini Khususnya di Universitas
Pembangunan Nasional (UPN) ” Veteran Jatim, dapat semakin maju dan terus
berkembang seiring dengan perkembangan teknologi khususnya dalam bidang
Robotika, dan terbukanya ide-ide yang brilian dikalangan mahasiswa UPN dalam
1.6 Metode Penelitian
Metodologi yang digunakan untuk menyelesaikan tugas akhir ini adalah
sebagai berikut:
a. Studi Kepustakaan
Pada tahap ini dilakukan pemahaman kepustakaan yang
berhubungan dengan pembuatan perangkat lunak secara umum,
Kepustakaan yang berhubungan dengan robot itu sendiri, serta literatur
tentang hardware yang diperlukan.
b. Desain system
Pada tahap ini dilakukan analisis kebutuhan dan perancangan
system untuk merumuskan solusi yang tepat dalam pembuatan sistem serta
kemungkinan yang dapat dilakukan untuk mengimplementasikan
rancangan tersebut.
c. Implementasi
Pada tahap ini dilakukan implementasi rancangan sistem yang telah
dibuat. Tahapan ini merealisasikan apa yang terdapat pada tahapan
sebelumnya menjadi sebuah aplikasi yang sesuai dengan apa yang
direncanakan
d. Uji Coba dan Evaluasi
Pada tahap ini dilakukan ujicoba terhadap system yang dibuat,
serta melakukan perbaikan untuk lebih menyempurnakan system yang
dibuat.
e. Penyusunan laporan tugas akhir
Tahap ini dilakukan untuk membuat laporan dari semua dasar teori
dan metode yang digunakan serta hasil-hasil yang diperoleh selama
pengerjaan tugas akhir.
1.7 Sistematika Penulisan
Sistematika Penulisan yang digunakan dalam Tugas Akhir ini adalah
sebagai berikut :
BAB I PENDAHULUAN
Berisi tentang gambaran umum latar belakang penulisan
Tugas Akhir, tujuan, rumusan masalah, dan sistematika
penulisan.
BAB II TINJAUAN PUSTAKA
Membahas tentang teori penunjang dari pembahasan
masalah antara lain tentang komponen-komponen yang
digunakan dalam pembangunan sistem yang dibangun.
BAB III ANALISA DAN PERANCANGAN SISTEM
Bab ini menjelaskan tentang perancangan robot berkaki
cahaya, dan juga Bahasa Pemograman C sebagai
operasional mickrokontroler ATMEGA16
BAB IV IMPLEMENTASI SISTEM
Bab ini berisi hasil implementasi dari perancangan aplikasi
yang telah dibuat sebelumnya beserta pembahasan dari
robot berkaki yang menggunakan mikrokontoler
ATMEGA16, dua buah servo HS-311, Sensor Photo Diode
sebagai pendeteksi cahaya, dan juga Bahasa Pemograman C
sebagai operasional mickrokontroler ATMEGA16
BAB V UJI COBA DAN EVALUASI
Pada bab ini akan dijelaskan mengenai proses uji coba dari
program yang telah dibuat sampai dengan hasil kerja robot
tersebut
BAB VI PENUTUP
Bab ini akan menjelaskan tentang Kesimpulan dari
keseluruhan isi dari laporan dan Tugas Akhir serta
saran-saran untuk pengembangan lebih lanjut.
DAFTAR PUSTAKA
Berisi tentang literatur sebagai teori pendukung
TINJAUAN PUSTAKA
2.1 Perkembangan Teknologi Robot
Dalam kehidupan masyarakat modern, istilah robot sudah terasa begitu
akrab. Meskipun kehadirannya mungkin masih jarang dijumpai di banyak tempat.
Tapi setidaknya akan segera paham jika disebutkan tentang robot. Sementara, bagi
kebanyakan orang, robot seringkali diartikan sebagai mesin berbentuk manusia
yang bisa melakukan gerakan atau tindakan seperti manusia. Ini merupakan imej
yang ditimbulkan oleh kebanyakan film bergenre science fiction. [1]
Robot adalah merupakan perangkat otomatis yang menyelenggarakan
fungsi yang biasanya dianggap berasal dari manusia atau sebuah mesin yang
berbentuk manusia. Mungkin sebuah definisi yang kurang tepat karena ada
beberapa robot yang tidak berbentuk menyerupai manusia atau bagian dari organ
manusia maupun menggantikan pekerjaan-pekerjaan yang semula dilakukan oleh
manusia meskipun sebagian besar tujuan penciptaan robot adalah untuk itu.
Karena kenyataannya robot-robot yang telah berhasil dibuat dan kemudian
menjadi terkenal, justru bukan robot yang menyerupai bentuk tubuh atau bagian
organ manusia. Misalnya robot anjing AIBO ERS-210 yang dibuat oleh
2.1.1 Sejarah robot berawal dari sebuah cerpen
Istilah robot pertama kali dipopulerkan dalam sebuah cerita pendek
(cerpen) yang berjudul Runaround, ditulis oleh Isaac Asimov pada tahun 1942.
Sebenarnya istilah robot sudah digunakan oleh Karel Capek, seorang penulis
drama dari Cekoslovakia. Cerpen itu bercerita tentang robot therapy. Runaround,
Joseph Weizenbaum, seorang profesor di Institut Massachusetts, membuat
program Eliza pada tahun 1966. Sekitar 240 (dua ratus empat puluh) baris kode
yang dibuat oleh Weizenbaum untuk mensimulasikan sebuah psikotherapy.[1]
Ternyata bukan hanya Prof. Weizenbaum saja yang terobsesi dengan
cerpen Runaround hasil karya Asimov itu. Sepuluh tahun sebelum Prof.
Weizenbaum membuat program Elilza, George Devol dan Joseph Engelberger
sudah lebih dulu membahas tentang pembuatan robot berdasarkan ide cerita dari
cerpen Runaround tersebut. Mereka berdua selanjutnya mendirikan perusahaan
yang diberi nama Unimation, singkatan dari istilah Universal Automation.
Unimation menjadi perusahaan pertama di dunia yang menghasilkan robot secara
komersial. Bahkan kabarnya perusahaan ini sampai sekarang masih terus
berproduksi. [1]
2.1.2 Periode Teknologi Robot
Meskipun ada sebagian yang mungkin tidak bisa didefinisikan sebagai
robot, tapi hasil-hasil pencipataan yang disusun berdasarkan urutan kurun waktu
Tahun 270 sebelem masehi, Ctesibus, pada jaman Yunani kuno telah membuat
organ-organ dan jam air yang dapat membuat gerakan-gerakan tertentu.
Sejarah Robot pada tahun 1818, Mary Shelley menulis novel
"Frankenstein" yang terkenal dan menyeramkan itu. Cerita tentang manusia yang
diciptakan oleh Dr Frankenstein. Setelah itu pada tahun 1921, Istilah "robot"
pertama kali digunakan dalam sebuah drama berjudul "RUR" atau "Rossum's
Universal Robot" yang ditulis oleh penulis dari Ceko, Karel Capek. Secara
sederhana drama ini mengkisahkan tentang manusia yang membuat robot dan
pada akhirnya robot itu membunuh manusia yang membuatnya. Selang dua puluh
tahun, pada tahun 1941, penulis fiksi ilmiah Isaac Asimov pertama kali
menggunakan kata "robot" untuk menggambarkan teknologi robot dan
meramalkan munculnya robot industri yang kuat. Pada tahun berikutnya, yaitu
tahun 1942, Asimov menulis "Runaround", cerita tentang robot dan memperkenal
"Tiga Hukum Robot". Tahun 1948, Cybernetics", sebuah hasil tulisan tentang
pengaruh pada kecerdasan buatan yang diterbitkan oleh Norbert Wiener. Pada
masa itu juga seorang perintis teknologi robot di Inggris, William Grey Walter
menciptakan robot sederhana yang diberi nama Elmer dan Elsie yang meniru
perilaku manusia hidup dengan menggunakan elektronik. George Devol dan
Joseph Engleberger menciptakan robot lengan yang diprogram untuk pertama
kalinya dan menciptakan istilah Universal Otomasi untuk pertama kalinya juga.
George Devol dan Joseph Engelberger membentuk perusahaan penghasil robot
pertama di dunia para tahun 1956. Pada tahun ini juga sebuah robot elektronik
Tahun 1959, Computer Assisted Manufacturingg telah didemonstrasikan
di Laboratorium Servomechanisms di MIT (Massachusetts Institute of
Technology). Selang 2 tahun, tepatnya tahun 1961, robot industri pertama
diperagakan di pabrik mobil General Motors di New Jersey. Robot itu dinamakan
UNIMATE .pada tahun 1963, robot lengan buatan yang dikontrol oleh computer
pertama kali dirancang. Lengan (tangan) robot ini dirancang sebagai alat bagi
penyandang cacat dengan kelengkapan enam sendi yang memberikan fleksibilitas
lengan manusia. Pembuatan system canggih yang pertama dan disebut
DENDRAL pada tahun 1965. Program ini dirancang untuk melaksanakan
akumulasi pengetahuan dari subjek ahli. Berikutnya pada tahun 1968, Marvin
Minsky membuat lengan tentakel yang dinamakan Octopus. Satu tahun berikutnya
pada tahun 1969, pembuatan lengan Stanford yang digerakkan oleh tenaga listrik.
Lengan robot ini dikendalikan oleh komputer.
Kemunculan robot Shakey pada tahun 1970 yang disebut-sebut sebagai
mobile robot yang pertama yang dikendalikan oleh kecerdasan buatan. Robot ini
dibuat oleh SRI International. Tahun 1974, perancangan lengan robot yang
bekerja berdasarkan umpan balik dan sensor tekanan. Robot yang disebut dengan
nama Silver Arm ini digunakan untuk perakitan komponen-komponen di bidang
industry. Tahun 1979, pertama kalinya didemonstrasikan kemampuan sebuah
robot yang berlalu lalang di dalam sebuah ruangan yang penuh dengan kursi.
Robot yang diberi nama Stanford ini dapat menghindari menabrak kursi-kursi
yang diletakkan secara acak di ruangan tersebut. Robot ini dilengkapi dengan
komputer memperhitungkan jarak benda dan hambatan yang ada pada medan.
Pada kurun waktu berikutnya penciptaan robot sudah bisa didapatkan melalui
informasi yang banyak dipublikasikan oleh media massa. Informasi tersebut dapat
didapatkan melalui media elektronik, media cetak, dan juga media on-line. [1]
2.2 Mikrokontroler ATMEGA16
AVR (Alf, Vegard and RISC) merupakan seri mikrokontroler CMOS
(Canadian Meteorological and Oceanographic Society) 8-bit (delapan Binary
digit) buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set
Computer). Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR
mempunyai 32 (tiga puluh dua) register general-purpose, timer/counter fleksibel
dengan mode compare, interrupt internal dan eksternal, serial UART (Universal
Asynchronous Receiver-Transmitter), Programmable Watchdog Timer, dan mode
power saving, ADC (Analog-to-digital converter) dan PWM (Pulse-width
modulation) internal.
AVR juga mempunyai In-System Programmable Flash on-chip yang
mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan
hubungan serial SPI (Serial Peripheral Interface). ATMega16. ATMega16
mempunyai throughput mendekati 1 (satu) MIPS (million instructions per second)
per MHz (Megahertz) membuat disainer sistem untuk mengoptimasi konsumsi
daya versus kecepatan proses. Beberapa keistimewaan dari AVR ATMega16
Memories, Peripheral Features, Special Microcontroller Features, I/O and
Package, Operating Voltages.
Advanced RISC Architecture memiliki fitur 130 Powerful Instructions –
Most Single Clock Cycle Execution, 32 x 8 (delapan) General Purpose Fully
Static Operation, Up to 16 (enam belas) MIPS Throughput at 16 MHz, On-chip
2-cycle Multiplier. Fitur dari Nonvolatile Program and Data Memories yaitu
memiliki 8KB (Kilobytes) of In-System Self-Programmable Flash, Optional Boot
Code Section dengan Independent Lock Bits, 512 Bytes EEPROM (Electrically
Erasable Programmable Read-Only Memory), 512 Bytes Internal SRAM (Static
random-access memory) dan Programming Lock for Software Security. Fitur-fitur
Peripheral dari ATMEGA16 yaitu memiliki dua buah 8-bit Timer/Counters
dengan Separate Prescalers and Compare Mode, dua buah 8-bit Timer/Counters
dengan Separate Prescalers and Compare Modes, satu buah 16-bit Timer/Counter
dengan Separate Prescaler, Compare Mode, dan Capture Mode Real Time Counter
dengan Separate Oscillator, empat buah PWM Channels, 8-channel, 10-bit ADC,
byte-oriented Two-wire Serial Interface dan Programmable Serial USART
(Universal asynchronous receiver/transmitter). Fitur-fitur spesial dari
ATMEGA16 yaitu memiliki Power-on Reset and Programmable Brown-out
Detection, Internal Calibrated RC (Radio Control) Oscillator, External and
Internal Interrupt Sources dan enam Sleep Modes: Idle, ADC Noise Reduction,
Power-save, Powerdown, Standby and Extended Standby. Untuk fitur dari
input/outputnya (I/O and Package) yaitu memiliki 32 Programmable I/O Lines dan
lead TQFP (Thin Quad Flat Pack) , 44 lead PLCC (plastic leaded chip carrier),
and 44 pad MLF (Micro Lead Frame). Untuk fitur Operating Voltages yaitu
memiliki 2.7 - 5.5 V (Volt) untuk Atmega16L dan 4.5 - 5.5V untuk Atmega16.
Gambar 2.1 Bentuk Chip ATMega16 Gambar 2.2 Pin-pin ATMega16
Dari gambar diatas, bentuk dari Chip atau microcontroller ATMEGA16
ditunjukkan seperti Gambar 2.1. Dan pin-pin pada ATMega16 dengan kemasan
40-pin DIP (dual inline package) ditunjukkan oleh Gambar 2.2. Guna
memaksimalkan performa, AVR menggunakan arsitektur Harvard (memori dan
bus terpisah untuk program dan data). [4]
2.3 Servo HS-311
Motor servo pada dasarnya adalah motor dc dengan kualifikasi khusus
yang sesuai dengan aplikasi “sevosing” didalam teknik control. Dalam kamus
Oxfrod istilah “servo” diartikan sebagai “ amechanism that control a large
mechanism “.tidak ada sepisi baku yang disepakati untuk menyatakan bahwa
motor harus memilki kemampuan yang baik dalam mengatasi perubahan yang
cepat dalam posisi dan kecepatan. Motor servo juga dikehendaki handal dalam
beroperasi dalam lingkup torsi yang berubah - berubah. Berapa tipe motor yang
dijual dengan paket rangkaian drivernya telah memiliki rangkaia control
kecepatan yang menyatu didalamnya. Putaran motor tidak lagi berdasarkan
tegangan supplay ke motor, namun berdasarkan tegangan input khusus yang
berfungsi sebagai referensi kecepatan output.
Motor servo merupakan motor yang diatur dan dikontrol menggunakan
pulsa. Motor standard ini memiliki tiga posisi yaitu posisi 0 (nol) derajat, posisi 90
(Sembilan puluh) derajat, dan posisi 180 (seratus delapan puluh) derajat. Poros
motor servo biasanya dihubungkan dengan suatu mekanisme sehingga dapat
membuat / mengontrol pergerakan roda depan pada sebuah mobil mainan. Pada
saat poros pada posisi 0 derajat, maka roda mobil mainan akan bergerakan kekiri,
jika posisi poros pada 90 derajat, maka roda depan mobil maianan akan lurus,
sedangkan jika posisi 180 derajat, maka roda depan mobil akan berbelok kekanan.
Karena ada tiga posisi utama seperti yang dijelaskan pada Gambar 2.3,
maka dibuatlah secara khusus mengatur motor servo tersebut, dengan cara
memberikan pulsa digital dengan lebar yang berbeda – beda. Jika diberikan pulsa
dengan lebar 1.5ms (satu koma lima mili second) maka motor servo akan berputar
90 derajat, pulsa dengan 1.75ms (satu koma tujuh puluh lima mili second) akan
membuat motor servo menuju 180 derajat, sedangkan pulsa dengan lebar 1.25ms
(satu koma dua puluh lima mili second) akan membut motor servo bergerak
menuju 0 derajat, motor servo tersebut disebut Motor servo standard yang
memiliki batas, hal ini menyebabkan poros servo tidak berputar 360 derajat,
sedangkan motor servo continous jika diberi puls 1.25ms akan berputar CW dan
sedangkan jika diberi 1.75ms maka akan berputar CCW dan juga bila diberi 1,5ms
motor servo kan diam tidak bergerak. Pada dasarnya motor servo continous akan
berputar 360 derajat. [9]
Motor Servo Standard dan Motor Servo Continuous adalah dua jenis servo
yang ada di pasaran. Tipe kedua (continuous) adalah motor servo standard yang
dilepas bagian feedback-nya, sehingga poros servo tidak dapat mengunci pada
posisi tertentu.
HS311 adalah salah satu motor servo standard dengan pengguna cukup
besar. Alasannya klasik, harganya cukup ekonomis untuk kemampuannya yang
Gambar 2.4 Servo HS-311
Gambar 2.5 Bagan Servo HS-311
Pada Gambar 2.4 adalah merupakan bentuk dari Servo HS-311, dan
Gambar 2.5 merupakan bagan dari servo HS-311
Servo ini dapat beroperasi pada jangkauan 180° ketika diberikan sebuah
pulsa antara 600 usec to 2400 usec. Bila memerlukan putaran 360°, HS311 dapat
di-modifikasi, dengan melepas bagian feedback-nya. Perlu kehati-hatian untuk
2.4 Photo Diode
Photodiodes dibuat dari semikonduktor dengan bahan yang populer adalah
silicon (Si) atau galium arsenida (GaAs), dan yang lain meliputi InSb (Indium
antimonide), InAs (Indium arsenide), PbSe (Lead selenide). Material ini menyerap
cahaya dengan karakteristik panjang gelombang mencakup: 2500 Å (Angstrom) –
11000 Å untuk silicon, 8000 Å – 20,000 Å untuk GaAs. Jika ada cahaya dengan
energi photon yang cukup megenai semikonduktor, maka photon akan diserap
sehingga menghasilkan elektron bebas dan hole. Apabila absorpsi terjadi pada
daerah depletion, carrier ini akan terbawa dari junction oleh medan yang tercipta
dari daerah tersebut dan menghasilkan arus. Pada photo diode, arus bergantung
linier pada intensitas cahaya. Respons frekuensi bergantung pada bahan (Si
900nm (nanometer), GaAs 1500nm, (Ge General Electric) 2000nm). [11]
Gambar 2.6 Photo Diode Gambar 2.7 Pin Photo Diode
Gambar 2.6 merupakan salah satu contoh bentuk dari Photo Diode dan
2.5 Pemprograman Dengan Bahasa C
Bahasa pemrograman C merupakan salah satu bahasa pemrograman
komputer. Dibuat pada tahun 1972 oleh Dennis Ritchie untuk Sistem Operasi
Unix di Bell Telephone Laboratories. Akar dari bahasa C adalah bahasa BCPL
yang dikembangkan oleh Martin Richards pada tahun 1967. Bahasa ini
memberikan ide kepada Ken Thompson yang kemudian mengembangkan bahasa
yang disebut dengan B pada tahun 1970. Perkembangan selanjutnya dari bahasa
B adalah bahasa C oleh Dennis Ritchie sekitar tahun 1970-an di Bell Telephone
Laboratories Inc. (sekarang adalah AT&T Bell Laboratories). Bahasa C pertama
kali digunakan pada komputer Digital Equipment Corporation PDP-11 yang
menggunakan sistem operasi UNIX. [7],[12]
Meskipun C dibuat untuk memprogram sistem dan jaringan komputer
namun bahasa ini juga sering digunakan dalam mengembangkan software
aplikasi. C juga banyak dipakai oleh berbagai jenis platform sistem operasi dan
arsitektur komputer, bahkan terdapat beberepa compiler yang sangat populer telah
tersedia. C secara luar biasa memengaruhi bahasa populer lainnya, terutama C++
yang merupakan extensi dari C. [7]
Standar bahasa C yang asli adalah standar dari UNIX. Sistem operasi,
kompiler C dan seluruh program aplikasi UNIX yang esensial ditulis dalam
bahasa C. Kepopuleranbahasa C membuat versi-versi dari bahasa ini banyak
dibuat untuk komputer mikro. Untuk membuat versi-versi tersebut menjadi
standar, ANSI (American National Standards Institute) membentuk suatu komite
ANSI untuk bahasa C. Standar ANSI ini didasarkan kepada standar UNIX yang
diperluas. [12]
2.5.1 Proses Kompilasi dan Linking Program C
Proses dari bentuk source program, yaitu program yang ditulis dalam
bahasa C hingga menjadi program yang executable ditunjukkan pada Gambar 2.8
di bawah ini : [12]
2.5.2 Struktur Penulisan Program C
Program C pada hakekatnya tersusun atas sejumlah blok fungsi. Sebuah
program minimal mengandung sebuah fungsi. Fungsi pertama yang harus ada
dalam program C dan sudah ditentukan namanya adalah main(). Bagian
pernyataan fungsi (sering disebut tubuh fungsi) diawali dengan tanda kurung
kurawal buka ({) dan diakhiri dengan tanda kurung kurawal tutup (}). Di antara
kurung kurawal itu dapat dituliskan statemen-statemen program C. Namun pada
kenyataannya, suatu fungsi bisa saja tidak mengandung pernyataan samasekali.
Berikut ini adalah struktur dari program C yang ditunjukkan pada Gambar 2.9.
Gambar 2.9 Struktur Dari Program C
Bahasa C dikatakan sebagai bahasa pemrograman terstruktur karena
strukturnya menggunakan fungsi-fungsi sebagai program-program bagiannya
(subroutine). Fungsi-fungsi yang ada selain fungsi utama (main()) merupakan
program-program bagian. Fungsi-fungsi ini dapat ditulis setelah fungsi utama
atau diletakkan di file pustaka (library). Jika fungsi-fungsi diletakkan di file
pustaka dan akan dipakai di suatu program, maka nama file judulnya (header
file) harus dilibatkan dalam program yang menggunakannya dengan
2.5.3 Perintah Dasar Dalam Pemrograman Bahasa C a) Fungsi main()
Fungsi main() harus ada pada program, sebab fungsi inilah yang
menjadi titik awal dan titik akhir eksekusi program. Tanda { di awal
fungsi menyatakan awal tubuh fungsi dan sekaligus awal eksekusi
program, sedangkan tanda } di akhir fungsi merupakan akhir tubuh
fungsi dan sekaligus adalah akhir eksekusi program. Jika program terdiri
atas lebih dari satu fungsi, fungsi main() biasa ditempatkan pada posisi
yang palingatas dalam pendefinisian fungsi. Hal ini hanya merupakan
kebiasaan. Tujuannya untuk memudahkan pencarian terhadap program
utama bagi pemrogram. Jadi bukanlah merupakan suatu keharusan. [12]
b) Fungsi printf()
Fungsi printf() merupakan fungsi yang umum dipakai untuk
menampilkan suatu keluaran pada layar peraga. Untuk menampilkan
tulisan Selamat belajar bahasa C, misalnya, pernyataan yang diperlukan
berupa printf(“Selamat belajar bahasa C”);
Pernyataan di atas berupa pemanggilan fungsi printf() dengan
argumen atau parameter berupa string. Dalam C suatu konstanta string
ditulis dengan diawali dan diakhiri tanda petik- ganda (“). Perlu juga
diketahui pernyataan dalam C selalu diakhiri dengan tanda titik koma (;).
Tanda titik koma dipakai sebagai tanda pemberhentian sebuah
Mengenai penentu format di antaranya berupa %d untuk
menampilkan bilangan bulat (integer), %f untuk menampilkan bilangan
titik-mengambang (pecahan), %c untuk menampilkan sebuah karakter
dan %s untuk menampilkan sebuah string, contoh: printf(“Nama : %s\n”,
“Shofyan Arif”); .[12]
2.5.4 Kelebihan Bahasa C
Bahasa C merupakan salah satu pilihan dari sebagian kalangan
programmer untuk membuat aplikasi untuk robot. Meskipun begitu, Bahasa C
juga memiliki kelebihan dan kekurangan dari pada bahasa sesudahnya. berikut ini
sebagian kecil dari kelebihan maupun kekurangan Pemrograman Bahasa C :
a. Kelebihan Bahasa C
Kelebihan dari Bahasa C adalah tersedia hampir di semua jenis
komputer. Kode bahasa C sifatnya adalah portable dan fleksibel untuk
semua jenis komputer. Bahasa C hanya menyediakan sedikit kata - kata
kunci, hanya terdapat 32 (tiga puluh dua) kata kunci. Proses executable
program bahasa C lebih cepat. Dukungan pustaka yang banyak.. C adalah
bahasa yang terstruktur dan Bahasa C termasuk bahasa tingkat menengah
b. Kekurangan Bahasa C
Banyaknya Operator serta fleksibilitas penulisan program
kadang-kadang membingungkan pemakai. Bagi pemula pada umumnya akan
2.6 Aplikasi Code Vison AVR
CodeVisionAVR adalah salah satu Software yang digunakan untuk
memprogram AVR. CodeVisionAVR sangat mudah untuk digunakan, tinggal
download kedalam IC yang akan diberi program. Kenapa sangat mudah
digunakan karena CodeVision AVR ini sendiri sudah memiliki User Interface
yang lumayan bagus sehingga memudahkan penggunanya, selain itu sendiri
CodeVision AVR juga mempunyai banyak sekali fitur-fitur yang memang
dikhususkan untuk pemrograman AVR. Kelemahannya adalah CodeVision AVR
ini masih mengguanakan Low Level Language yang berbasis bahasa C. [6]
2.7 Aplikasi AVR Studio
AVRStudio 4 merupakan tool untuk membangun aplikasi aplikasi berbasis
mikrokontroler. Sesuai dengan namanya maka AVRStudio 4 dirancang untuk
mikrokontroler AVR seri AT90SXXX, ATMEGAXXX, dan beberapa ATTINY
keluaran Atmel, dan hanya berjalan di platform windows saja. Komponen utama
WinAvr adalah avrgcc yakni c cross compiler turunan dari gcc yang telah
dimodifikasi untuk keperluan mikrokontroler AVR. Selain cross compiler,
AVRStudio 4 juga berisi beberapa program tambahan seperti avrlibc, avras,
avrdude, avrice, avrgdb, programer notepad editor dan masih banyak lagi yang
lainnya. Jadi AVRStudio 4 menggunakan bahasa asm sebagai bahasa untuk
BAB III
ANALISIS DAN PERANCANGAN SISTEM
Pada bab ini dibahas mengenai beberapa hal dasar tentang bagaimana
perancangan robot dirancang, komponen-komponen apa saja yang dibutuhkan
dalam perancangan robot ini, bagaimana cara merancang robot ini dan flowchart
robot
Dalam pembuatan robot ini penulis memperhatikan beberapa aspek yang
dibutuhkan, yaitu :
a. Robot ini dirancang dengan menggunakan sensor Photodiode sebagai
pendeteksi adanya cahaya
b. Robot ini dirancang dengan menggunakan Mikrokontroller ATMega16
sebagai otak atau pengendali utama pada robot
c. Robot ini menggunakan Bahasa C sebagai Bahasa pemrogramannya
d. Robot ini dirancang untuk dapat berjalan secara otomatis dengan
kemampuan program yang telah diinputkan di dalam robot tersebut serta
robot dapat menghindari sebuah halangan.
e. Robot ini bergerak dalam sebuah bidang yang datar dan rata.
f. Robot ini menggunakan dua buah motor servo HS-311 sebagai penggerak
kaki-kaki robot.
3.1 Analisis Sistem
Seperti yang dijelaskan pada Bab sebelumnya. Banyak jenis robot kaki
yang telah ada disekeliling kita, seperti robot kaki Hexapot, robot berkaki dua
sampai ada robot berkaki enam yang pergerakan robotnya menyerupai hewan
laba-laba atau tarantula. Namun dalam memenuhi Tugas Akhir ini dipilihlah
desain robot kaki crawler yang memiliki enam kaki dengan dua servo penggerak.
Dalam perancangan robot kaki tersebut, dimana ketiga kaki kanan
digerakkan oleh sebuah servo yang berada pada sisi kanan robot, dan ketiga kaki
bergerak secara bersamaan menurut rangkaiannya. Begitu juga dengan ketiga kaki
sebelah kiri, yaitu digerakkan oleh sebuah servo yang berada pada sisi kiri robot,
dan ketiga kaki bergerak secara bersamaan menurut rangkaiannya. Dan jika robot
berbelok kekanan, maka ketiga kaki sebelah kanan bergerak mundur dan ketiga
kaki kiri bergerak maju, sehingga robot bergerak berbelok kekanan. Begitu juga
ketika robot berbelok kekiri, maka ketiga kaki sebelah kiri bergerak mundur dan
ketiga kaki kanan bergerak maju, sehingga robot bergerak berbelok kekiri.
Pergerakan kaki seterusnya seperti itu sehingga terjadilah gerak robot yang
diinginkan.
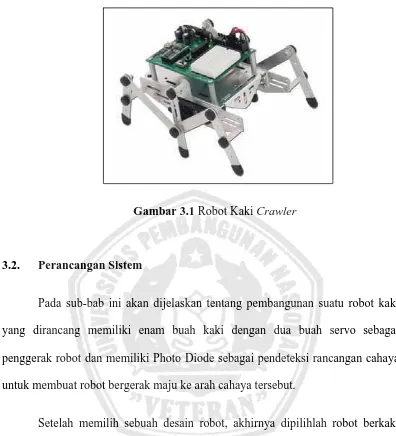
Desain robot crawler yang dibuat kurang lebih seperti Gambar 3.1 berikut
ini:
Gambar 3.1 Robot Kaki Crawler
3.2. Perancangan Sistem
Pada sub-bab ini akan dijelaskan tentang pembangunan suatu robot kaki
yang dirancang memiliki enam buah kaki dengan dua buah servo sebagai
penggerak robot dan memiliki Photo Diode sebagai pendeteksi rancangan cahaya
untuk membuat robot bergerak maju ke arah cahaya tersebut.
Setelah memilih sebuah desain robot, akhirnya dipilihlah robot berkaki
enam dengan desain menyerupai robot crawler kit seperti pada Gambar 3.1,
dimana desain tersebut sangat simpel dan sangat terjangkau dalam hal harga
bahan dan lain-lain sampai pencodingan program, sangat menghemat code yang
dituliskan dan diuploadkan di microcontrollernya, sehingga menghemat kapasitas
memory, meghemat waktu, dan menghemat biaya. Seperti yang dijelaskan diatas,
robot tersebut hanya memiliki dua buah servo seri HS-311 sebagai penggerak
3.3 Deskripsi Sistem
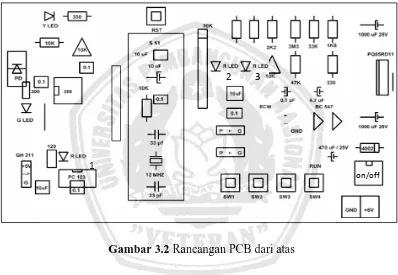
Penjelasan dari sistem robot crawlet yang dibuat adalah pertama tombol
ON/OFF ditekan sampai lampu LED warna merah 1 (R LED 1), kuning (Y LED)
dan hijau (G LED) yang berada di depan rancangan PCB menyala. Bisa dilihat
seperti dalam rancangan PCB pada Gambar 3.2 berikut:
[image:37.595.110.508.267.542.2]
Gambar 3.2 Rancangan PCB dari atas
Kemudian pilih Mode dengan menekan tombol SW1 untuk Mode
pendeteksi suara, tombol SW2 untuk pendeteksi cahaya dan tombol SW3 untuk
Mode penghalang rintang. Tetapi dalam pembuatan Tugas Akhir ini, dipilihlah
robot pendeteksi cahaya. Jadi tekan tombol SW2 untuk memilih mode pendeteksi
Cahaya, setelah berhasil ditekan, maka lampu LED merah 3 (R LED 3) yang
berada ditengah rancangan PCB diatas menyalah tetapi berkedip-kedip. Setelah itu
tekan tombol SW4 untuk meng-play atau memulai gerakan robot. Setelah berhasil
1
2 3
menekan tombol SW4, lampu LED merah 3 (R LED 3) menyalah tanpa
berkedip-kedip dan cahaya lampu LED merah 1 (R LED 1) mati diikuti dengan robot
bergerak berputar ke arah kiri 360o terus menerus sampai sensor Photodiode
menerima rangsangan cahaya hingga beberapa persen dengan ditunjukkan dengan
cahaya lampu LED merah 1 (R LED 1) berkedip-kedip, setelah Photodiode
menerima rangsangan cahaya penuh maka lampu LED merah 1 (R LED 1)
menyalah penuh tanpa berkedi-kedip diikuti dengan robot yang bergerak kedepan
mengikuti dimana rangsangan cahaya tersebut dibidikkan ke arah sensor
photodiode tersebut. Jika cahaya yang dibidik (dalam hal ini menggunakan cahaya
lampu senter) dimatikan atau photodiode tidak lagi menerima rangsangan cahaya
ataupun kurang menerima rangsangan cahaya, maka robot akan berhenti dengan
delay beberapa milidetik dan delanjutnya robot berputar kembali 360o ke arak kiri
sampai robot tersebut menerima rangsangan cahaya kembali melalui sensor photo
diode tersebut. Untuk menghentikan robot, tekan tombol SW4, dan jika robot
tidak berhenti atau robot menerima perintah terlalu berlebihan, sehingga robot
mengalami error, maka tekan tombol RST (reset) untuk mengulang kembali
penginisialisasi system perangkat lunak robot tersebut. Dan selanjutnya, bisa
memilih mode yang lain dengan menekan pilihan SW1, SW2 atau SW3 untuk
menentukan pilihan mode, dan tombol SW4 untuk memulai eksekusi robot.Untuk
mematikan keseluruhan sistem robot, tekan tombol ON/OFF dan kemudian semua
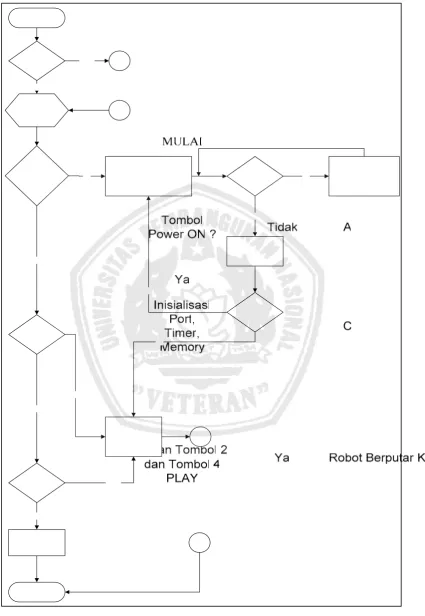
sistem hardware dan software robot mati. Penjelasan dalam bentuk Flowchart
khusus untuk masalah Reaksi Robot Berkaki Terhadap Cahaya Center dapat
3.4 Kebutuhan Perangkat Keras dan Perangkat Lunak
Untuk dapat membuat robot crawler ini dibutuhkan beberapa perangkat
keras dan perangkat lunak yang dapat mendukung pembangunan sebuah robot
crawler. Pada sub-bab ini akan dilakukan perincian terhadap apa saja perangkat
keras dan perangkat lunak yang dibutuhkan.
Dalam merancang suatu sistem hardware dan software robot maka kita
perlu menentukan jenis-jenis atau spesifikasi perangkat keras yang akan kita
gunakan. Hal ini merupakan persiapan awal yang harus dilakukan. Dimana
tiap-tiap hardware yang digunakan memiliki spesifikasi yang berbeda-beda. Dan
berikut hardware dan software yang dibutuhkan untuk merancang robot:
a. Hardware Robot
Ada beberapa hardware yang dibutuhkan untuk membuat robot
krawler, diantaranya sebagai berikut:
1. Sebuah Microcontroller ATMEGA16
2. Dua buah Transistor BC547
3. Sebuah Transistor PC123 dan Transistor LM358
4. Sebuah Electronic Semiconductors PQO5RD11
5. Sebuah Photodiode, sensor GH-311 dan Mic Condensor
6. Dua buah servo penggerak HS-311
7. PCB (Printed Circuit Board), Rangka Robot (besi dan
aluminium)
9. Lima buah lampu LED (Light Emitting Diodes)
10.Sebuah tempat baterai berkapasitas empat buah baterai AA
11.Lima buah Elco dengan berbagai ukuran
12.Sebuah button ON/OFF dan lima buah button switch untuk
pilihan mode
13.Dan komponen-komponen pengukung lainnya
b. Software
Dibawah ini merupakan beberapa software yang dibutuhkan untuk
membuat robot krawler, diantaranya sebagai berikut:
1. AVR Studio 4 sebagai tools pemrograman
2. Bahasa pemrograman menggunakan Bahasa C untuk
microcontroller ATMEGA16
c. Hardware Komputer
Dibawah ini merupakan kebutuhan hardware komputer untuk dapat
menjalankan program AVR Studio 4 Compiler sebagai code maker untuk
ditanamkan kedalam micro controller ATMEGA16 sebagai otak dari robot
tersebut atau sebagai pengatur perintah jalannya robot tersebut
1. Sistem komputer dengan spesifikasi pentium IV
2. Sistem Operasi menggunakan Windows 95, 98, Me, NT4, 2000,
dan XP.
3.5 Perancangan Badan dan Kaki Robot
Seperti yang sudah dijelaskan pada poin 3.1 pada bab ini, telah dipilih
jenis robot kaki clawler yang memiliki enam kaki dan dua buah servo penggerak
dikedua sisi robot. Dalam perancangan badan robot, telah dipilih rancangan kaki
seperti pada Gambar 3.4 berikut:
[image:42.595.178.436.268.497.2]
Gambar 3.4 Robot Kaki Crawler
Pada Gambar 3.5 merupakan tampilan rangkaian kaki-kaki robot clawler
yang dilihat dari samping. Dan pada Gambar 3.6 tampak seluruh badan robot
clawler yang dilihat dari arah depan atas.
[image:42.595.375.508.588.709.2]
Gambar 3.5 Robot Clawler dilihat dari Samping
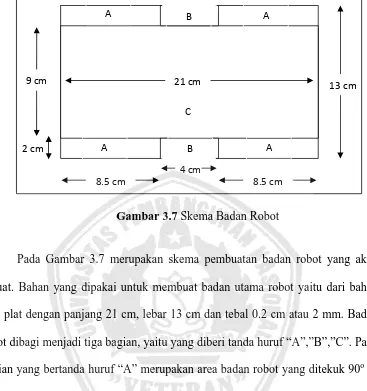
Gambar 3.7 Skema Badan Robot
Pada Gambar 3.7 merupakan skema pembuatan badan robot yang akan
dibuat. Bahan yang dipakai untuk membuat badan utama robot yaitu dari bahan
besi plat dengan panjang 21 cm, lebar 13 cm dan tebal 0.2 cm atau 2 mm. Badan
robot dibagi menjadi tiga bagian, yaitu yang diberi tanda huruf “A”,”B”,”C”. Pada
bagian yang bertanda huruf “A” merupakan area badan robot yang ditekuk 90o ke
bawah badan yang memiliki panjang 8.5 cm dan lebar 2 cm, bagian yang bertanda
huruf “B” merupakan bagian yang dipotong untuk tempat dudukan motor servo
yang memiliki panjang 4 cm dan lebar 2 cm, yang sebelumnya dipotong terlebih
dahulu sebelum proses penekukan bagian bertanda “A”, dan pada bagian yang
bertanda huruf “C” merupakan bagian utama badan robot dengan panjang 21 cm
dan lebar 9 cm.
Untuk lebih jelas tentang pengaturan luas dan juga jarak atau ukuran untuk
proses pemotongan dan penekukan bisa langsung dilihat pada Gambar 3.7
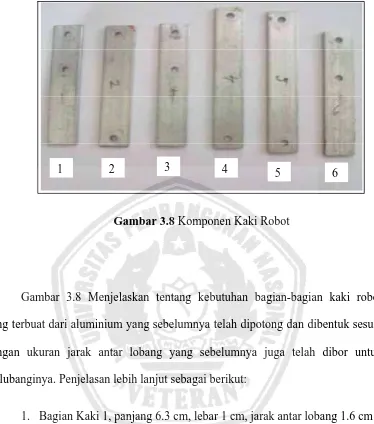
Gambar 3.8 Komponen Kaki Robot
Gambar 3.8 Menjelaskan tentang kebutuhan bagian-bagian kaki robot
yang terbuat dari aluminium yang sebelumnya telah dipotong dan dibentuk sesuai
dengan ukuran jarak antar lobang yang sebelumnya juga telah dibor untuk
melubanginya. Penjelasan lebih lanjut sebagai berikut:
1. Bagian Kaki 1, panjang 6.3 cm, lebar 1 cm, jarak antar lobang 1.6 cm
2. Bagian Kaki 2, panjang 6.3 cm, lebar 1 cm, jarak antar lobang 5.3 cm
3. Bagian Kaki 3, panjang 6.3 cm, lebar 1 cm, jarak antar lobang 1.6 cm
4. Bagian Kaki 4, panjang 7.3 cm, lebar 1 cm, jarak antar lobang 6.3 cm
5. Bagian Kaki 5, panjang 7.3 cm, lebar 1 cm, jarak antar lobang 6.3 cm
6. Bagian Kaki 6, panjang 6.3 cm, lebar 1 cm, jarak antar lobang 1.6 cm
Gambar 3.9 Komponen Tambahan Robot
Gambar 3.9 Menjelaskan tentang kebutuhan tambahan untuk pemasangan
seluruh badan robot termasuk kaki robot seperti mur, baut, pembatas badan robot
dan pembatas kaki robot. Penjelasan lebih lanjut sebagai berikut:
1. Baut biasa dengan panjang 0.8 cm atau 8 mm
2. Baut biasa dengan panjang 1.3 cm atau 13 mm
3. Baut lancip dengan panjang 0.7 cm atau 7 mm
4. Baut dan mur dengan panjang baut 0.8 cm atau 8 mm
5. Baut biasa dengan panjang 0.4 cm atau 4 mm
6. Pembatas besi berbentuk tabung dengan lobang mur di kedua sisi,
panjang pembatas 2.7 cm
7. Pembatas berbentuk cincin atau ring antar komponen kaki
8. Pembatas plastik berbentuk topi dengan lobang mur di kedua sisi
9. Alas kaki untuk seluruh kaki-kaki robot
Setelah kebutuhan komponen kaki-kaki robot terpenuhi, berikut cara untuk
merangkai kaki-kaki robot dengan urutan 5 – 2 – 1 – 3 – 6 – 4 sesuai dengan
Gambar 3.8, sehingga terbentuk suatu gerakan yang bagus ketika robot sudah jadi
[image:46.595.181.481.277.660.2]dan bisa dijalankan.
Gambar 3.10 Urutan Pertama, Kaki ke-5
Gambar 3.11 Urutan Kedua, Kaki ke-2 5
Gambar 3.12 Urutan Ketiga, Kaki ke-1
Gambar 3.13 Urutan Keempat, Kaki ke-3
Gambar 3.14 Urutan Kelima, Kaki ke-6 5
2
5
5 2
1
2
1
3
1
Gambar 3.15 Urutan Keenam, Kaki ke-4
Untuk merangkai kaki-kaki robot crawler dengan benar, harus
memperhatikan langkah-langkah seperti pada Gambar 3.10 sampai pada Gambar
3.15 yang dirangkai urut dari kaki ke-5, ke-2, ke-1, ke-3, ke-6 dan terakhir kaki
ke-4. karena panjang dan lobang untuk baut disetiap komponan-komponen atau
bagian-bagian kaki robot berbeda, jadi akan terjadi ketidak seimbangan pada kaki
robot jika salah langkah dalam perakitannya. 3
6 4
2
39
BAB IV
IMPLEMENTASI
Pada bab ini akan membahas tentang Implementasi Pembuatan Robot dari
hasil analisa dan perancangan sistem yang ada pada bab III, serta bagaimana cara
sistem robot dan robot tersebut dijalankan. Dalam hal ini, seperti yang telah
dijelaskan dibab-bab sebelumnya, Robot yang dikerjakan yaitu robot berjenis
crawler yang memiliki kelebihan atau memiliki fungsi sebagai robot pengikut
cahaya dengan memanfaatkan intensitas cahaya senter yang dibidik lurus kearah
photo diode yang juga berfungsi sebagai penerima rangsangan cahaya tersebut.
Untuk lebih lanjut dapat dijelaskan pada sub bab berikut :
4.1 Perakitan Robot
Ada dua tahap perakitan robot yaitu perakitan badan robot yang dijabarkan
sebagai berikut:
a. Perakitan PCB (Printed Circuit Board)
Gambar 4.2 Skematik Rangkaian Robot Kaki Crawler
Gambar 4.3 Desain Bagian Atas PCB Robot Kaki Crawler 5
2 3
1 6
7
8
9
10 4
Berikut penjelasan dari Gambar 4.3:
1. Tombol 4 atau tombol play
2. Tombol 3 arau tombol start program
3. Konektor motor servo
4. Mikrokontroller ATMega16
5. Port penghubung Downloader
6. Lampu LED
7. Pengatur Intensitas Cahaya
8. Photodiode (digunakan untuk pendeteksi cahaya)
9. PCB (Printed Circuit Board)
10.Tombol Reset
11.Resistor
12.PCB Cooler
13.Elco
14.Tombol Power On/Off
15.Terminal
Pada Gambar 4.1 merupakan Skematik Rangkaian Robot Kaki
Crawler. Untuk rancangan atau desain bagian atas dari PCB Robot Kaki
Clawler ditunjukkan pada Gambar 4.2. Dan pada Gambar 4.3 merupakan
b. Perakitan Badan dan Kaki Robot
Sebelum melakukan perakitan badan robot, terlebih dahulu siapkan
komponennya. Berikut komponen-komponen untuk merakit badan dan
kaki robot:
Gambar 4.4 Komponen Kaki Robot
Gambar 4.5 Komponen Tambahan Robot
Gambar 4.4 dan Gambar 4.5 merupakan kebutuhan-kebutuhan
yang harus disiapkan sebelum melakukan proses perakitan badan robot
dan juga pemasangan kaki-kaki robot dan komponen-komponen yang lain
Gambar 4.6 Badan Robot Jadi
Pada Gambar 4.6, merupakan badan utama robot yang terbuat dari
besi berjenis besi plat, yang sebelumnya disiapkan untuk proses
[image:53.595.151.507.359.613.2]selanjutnya
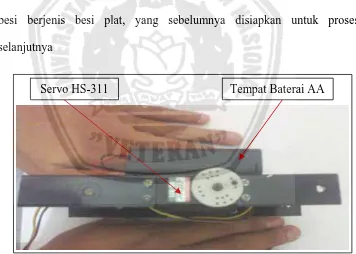
Gambar 4.7 Penempatan Servo dan Tempat Baterai AA
Pada Gambar 4.7, merupakan penempatan motor menggunakan
empat buah baut mur disetiap servo dan juga tempat baterai AA yang
ditempel diatas badan robot dengan menggunakan doble tape spons Badan Robot
Servo HS-311 Tempat Baterai AA
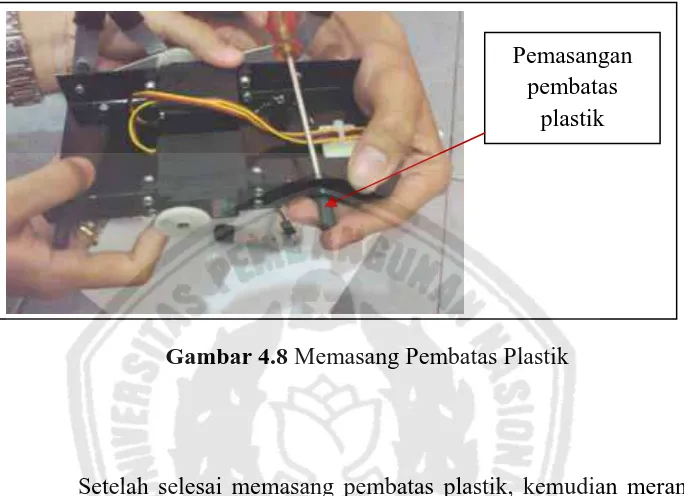
Setelah motor servo dan tempat baterai telah terpasang, tahap
selanjutnya adalah memasang pembatas plastik yang berbentuk topi ke
[image:54.595.146.488.202.450.2]badan robot seperti pada Gambar 4.8
Gambar 4.8 Memasang Pembatas Plastik
Setelah selesai memasang pembatas plastik, kemudian merangkai
kaki-kaki robot. Tetapi terlebih dahulu harus mencopot roda servo agar
[image:54.595.157.503.496.722.2]memudahkan dalam memasang kaki-kaki robot, seperti pada Gambar 4.9
Gambar 4.9 Melepas Roda Servo
Pemasangan pembatas
plastik
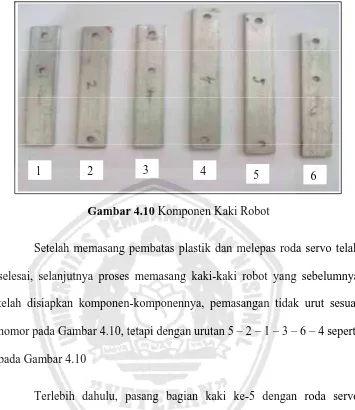
Gambar 4.10 Komponen Kaki Robot
Setelah memasang pembatas plastik dan melepas roda servo telah
selesai, selanjutnya proses memasang kaki-kaki robot yang sebelumnya
telah disiapkan komponen-komponennya, pemasangan tidak urut sesuai
nomor pada Gambar 4.10, tetapi dengan urutan 5 – 2 – 1 – 3 – 6 – 4 seperti
pada Gambar 4.10
Terlebih dahulu, pasang bagian kaki ke-5 dengan roda servo
dengan menggunakan baut dan memasang ring pembatas diantara kaki
ke-5 dengan roda servo, seperti pada Gambar 4.11
1 2 3 4 5 6
Gambar 4.12 Memasang Kaki ke-2 dan Ring Pembatas
Langkah kedua, pasang bagian kaki ke-2 dengan menggunakan
baut dan memasang ring pembatas diantara kaki ke-2 dan kaki-5, seperti
[image:56.595.149.481.358.569.2]pada Gambar 4.12
Gambar 4.13 Memasang Kaki ke-1 dan Ring Pembatas
Langkah ketiga, pasang bagian kaki ke-1 dengan menggunakan
baut dan memasang ring pembatas diantara kaki ke-1 dan kaki-2,
kemudian tutup mur dengan baut pada ketiga komponen kaki seperti pada
Gambar 4.13
5 2
1 5
Gambar 4.14 Memasang Kaki ke-3 dan Ring Pembatas
Langkah keempat, pasang bagian kaki ke-3 dengan menggunakan
baut dan memasang ring pembatas diantara kaki ke-3 dan kaki-2, dan tutup
baut menggunakan mur, seperti pada Gambar 4.14
Gambar 4.15 Memasang Kaki ke-6 dan Ring Pembatas
Langkah kelima, pasang bagian kaki ke-6 dengan menggunakan
baut dan memasang ring pembatas diantara kaki ke-6 dan kaki-5, dan tutup
baut menggunakan mur, seperti pada Gambar 4.15
5 2
1
3 Mur penutup
baut
Mur penutup
baut 5 2
1
Gambar 4.16 Memasang Kaki ke-4 dan Ring Pembatas
Langkah keenam, pasang bagian kaki ke-4 dengan menggunakan
baut dan memasang ring pembatas diantara kaki ke-4 dan kaki-1, dan tutup
baut menggunakan mur, seperti pada Gambar 4.16
Gambar 4.17 Memasang Roda Servo ke Servo
Langkah ketujuh, pasang kembali roda servo ke servo yang
sebelumya telah dilepas, seperti pada Gambar 4.17 5
2
1 3
Gambar 4.18 Memasang Kaki ke-3 ke pembatas plastik
Langkah kedelapan, pasang kaki ke-3 ke pembatas plastik dan
pasang ring pembatas diantara kaki ke-3 dan pembatas plastik, seperti pada
Gambar 4.18
Langkah kesembilan, pasang kaki ke-4 dan kaki ke-6 ke pembatas
plastik dan pasang ring pembatas diantara kaki ke-4 dan kaki ke-6 dan juga
[image:59.595.144.509.485.685.2]pasang ring pembatas diantara kaki ke-6 dan pembatas plastik, seperti pada
Gambar 4.19
Gambar 4.19 Memasang Kaki ke-4 dan ke-6 ke pembatas plastik Bagian Kaki
ke-3
Pembatas Plastik
Bagian Kaki ke-4
Gambar 4.20 Pemasangan Kaki Selesai
Gambar 4.21 Memasang Pembatas Besi
Setelah pemasangan kaki-kaki robot selesai seperti pada Gambar
4.20, kemudian dilanjutkan memasang pembatas besi dibadan robot yang
berfungsi sebagai dudukan PCB robot, seperti pada Gambar 4.21. Jumlah
pembatas besi ada empat buah yang penempatannya disesuaikan dulu
Gambar 4.22 Memasang Mur
Proses selanjutnya adalah, memasang PCB ke Pembatas Plastik
dengan menggunakan baut, dijelaskan seperti pada Gambar 4.22.
Pada Gambar 4.23 merupakan lanjutan dari proses diatas, yaitu
memasang kabel power dari tempat baterai ke terminal penghubung daya
yang digunakan untuk mengalirkan daya baterai ke rangkaian PCB.
Gambar 4.23 Memasang Kabel Baterai ke Terminal Daya Baut penutup Baut
Gambar 4.24 Memasang Kabel Servo
Proses selanjutnya adalah, memasang kabel servo ke rangkaian
PCB yang memiliki dua colokan untuk masing-masing servo, seperti
dijelaskan seperti pada Gambar 4.24.
4.2 Pemasangan Software
Sebelum program dibuat dan dimasukkan ke dalam chip robot, ada
beberapa cara yang harus dilakukan, yaitu pemasangan software Code Vision AVR
untuk membuat code robot, dan AVR Studio 4 untuk memasukkan code robot
yang dibuat kedalam mikrokontroller ATMega16. AVR Studio 4 sebenarnya bisa
digunakan untuk membuat program, tetapi dalam hal ini, agar lebih memudahkan
dalam pembuatan program atau code robot, dipilihlah Software Code Vision AVR
untuk membuat program dengan bahasa C dan untuk memudahkan dalam proses
pemasukkan program kedalam mikrokontroller ATMega16, dipilihlah Software
a. Install terlebih dahulu aplikasi Code Vision AVR, klik dua kali
setup.exe pada Komputer atau Notebook, seperti pada Gambar 4.25.
setelah itu maka akan keluar pilihan bahasa seperti pada Gambar 4.26:
[image:63.595.175.491.201.536.2]
Gambar 4.25 Langkah 1 Menginstall Progam Code Vision AVR
Gambar 4.26 Langkah 2 Menginstall Progam Code Vision AVR
Klik OK , maka keluar seperti Gambar 4.27
Gambar 4.28 Langkah 4 Menginstall Progam Code Vision AVR
Setelah klik Next pada langkah ke 3 yang ditunjukkan pada
Gambar 4.27, maka proses selanjutnya seperti pada Gambar 4.28.
Selanjutnya pilih i accept the agreement dan klik next untuk setuju dan
melanjutkan ke proses berikutnya, seperti pada Gambar 4.29 dan
kemudian pilih direktori penyimpanan untuk memasang software Code
Vision AVR. Kalau sudah memilih tempat penyimpanan, kemudian klik Next, seperti Gambar 4.29:
Gambar 4.30 Langkah 6 Menginstall Progam Code Vision AVR
Gambar 4.31 Langkah 7 Menginstall Progam Code Vision AVR
Kemudian, ikuti langkah memasang Program ke komputer
seperti yang dicontohkan pada Gambar 4.30 sampai proses
b. Setelah menginstall Code Vison AVR, selanjutnya install aplikasi AVR
[image:66.595.175.483.197.597.2]Studio 4, klik AvrStudio416Setup.exe pada Komputer, seperti pada Gambar 4.32 :
Gambar 4.32 Langkah 1 Menginstall Progam AVR Studio 4
Gambar 4.33 Langkah 2 Menginstall Progam AVR Studio 4
Kemudian klik Next seperti pada Gambar 4.33 dan Pilih I accept
the agreement kemudian klik tombol Next seperti pada Gambar 4.34 untuk
Gambar 4.34 Langkah 3 Menginstall Progam AVR Studio 4
Gambar 4.35 Langkah 4 Menginstall Progam AVR Studio 4
Gambar 4.37 Langkah 6 Menginstall Progam AVR Studio 4
Tentukan tujuan untuk menyimpan instalasinya kemudian klik next
[image:68.595.150.456.356.588.2]seperti pada Gambar 4.35 dan kemudian klik next sekali lagi seperti
Gambar 4.36, selanjutnya klik install seperti Gambar 4.37
Gambar 4.38 Langkah 7 Menginstall Progam AVR Studio 4
Tunggu sampai proses instalasi selesai, seperti pada Gambar 4.38
dan proses installasi telah selesai, klik finish untuk mengakhiri
Gambar 4.39 Langkah 8 Menginstall Progam AVR Studio 4
4.3. Implementasi coding
Pada tahapan ini akan dibahas menganai implementasi program yang telah
dibuat untuk robot, dari perancangan robot yang telah dibuat sebelumnya.
Langkah pertama yang harus dilakukan dalam pembuatan program adalah
mendeklarasikan semua fungsi, delay perintah ke perintah yang lain, dan semua
port pada mikrokontroler yang digunakan sebagai input dan output dari program
yang akan kita susun. Berikut adalah potongan program yang merupakan
penentuan port pada mikrokontroller dalam membaca perintah sebelum masuk ke
dalam perintah utama.
Letak port dan pin pada lampu
LED
LED1_P PORTA.3
Letak port dan pin pada Motor
Servo
Letak port dan pin pada tombol 2
dan 4
Deklarasi untuk tombol Power-On
Deklarasi untuk Motor Servo
Deklarasi untuk tombol 2 dan 4
Deklarasi untuk lampu LED
Deklarasi untuk sensor
Photodiode
Setelah proses deklarasi port yang ditentukan ke dalam mikrokontroller
selesai, langkah kedua adalah membuat program yang akan memfungsikan
register dan port mikrokontroller untuk menjalankan dan meneruskan perintah
kepada piranti pendukungnya. Berikut adalah potongan program dimana robot
akan berjalan sesuai inputan user. Program di bawah ini adalah sederet perintah
mutlak mewakili inisialisasi program di atas jika sensor mendekati sebuah
rintangan.
Perintah untuk menentukan servo
maju
Perintah untuk menentukan servo
mundur
Perintah untuk menentukan servo
berhenti
Perintah untuk menentukan servo
Perintah untuk menginterupsi
delay pada tiap tombol
Perintah untuk menginterupsi
delay lampu LED dan tombol
ketika 2 (dua) tombol yang
berbeda ditekan.
Setelah tahap telah selesai maka selanjutnya adalah pembuatan program
dengan menggunakan Code Vision AVR. Langkah pertama yaitu membuat project,
seperti yang dicontohkan pada Gambar 4.40 dan Gambar 4.41
Gambar 4.40 Langkah 1 Pembuatan Progam Robot dengan Code Vision AVR
Gambar 4.41 Langkah 2 Pembuatan Progam Robot dengan Code Vision AVR interrupt [TIM0_COMP]
void timer0_comp_isr(void)
interrupt [TIM1_COMPA] void
Gambar 4.42 Langkah 3 Pembuatan Progam Robot dengan Code Vision AVR
[image:73.595.179.431.334.553.2]
Gambar 4.43 Langkah 4 Pembuatan Progam Robot dengan Code Vision AVR
Setelah mengklik OK seperti pada Gambar 4.41, maka akan keluar form
untuk memilih dan menentukan deklarasi port-port robot. Setelah pendeklarasian
port-port robot selesai, pilih menu file Generate dan Save and Exit untuk
menyimpan project, seperti pada Gambar 4.43. Dan selanjutnya akan keluar form
Gambar 4.44 Langkah 5 Pembuatan Progam Robot dengan Code Vision AVR
Gambar 4.45 Langkah 6 Pembuatan Progam Robot dengan Code Vision AVR
Gambar 4.47 Langkah 8 Pembuatan Progam Robot dengan Code Vision AVR
Pada Gambar 4.47, merupakan tampilan awal untuk mengimplementasikan
coding yang telah dibahas sebelumnya. Pada Gambar 4.47 dapat dilihat potongan
coding deklarasi port yang secara instan terinput kedalam potongan koding yang
akan dibuat, karena itu merupakan keunggulan dari Code Vision AVR, dimana
deklarasi port-port tidak perlu ditulis lagi, karena pada awal pembuatan projek,
sudah ada pengaturan untuk deklarasi port yang selanjutnya akan terinput secara
otomatis, seperti pada Gambar 4.47.
Setelah proses pengkodingan atau proses pembuatan program untuk robot
selesai, selanjutnya adalah melakukan pemasangan koding yang telah dibuat
kedalam mikrokontroller robot atau dengan kata lain mendownload program.
Berikut langkah-langkah mendownload program dengan menggunakan AVR
Gambar 4.48 Langkah 1 Memasang Program pada Robot
Langkah pertama, colokkan downloader ke komputer dan robot. Kemudian
kondisikan robot dalam keadaan ON. Lalu jalankan program AVR Studio 4,
kemudian klik Con pada AVR Studio, dapat dilihat pada Gambat 4.48.
Gambar 4.49 Langkah 2 Memasang Program pada Robot
Selanjutnya akan keluar form seperti Gambar 4.49, yang digunakan untuk
menentukan jenis platform dan juga port dimana downloader ditancapkan ke
komputer, atau lebih mudah memilih Auto yang dimana port secara otomatis
terdeteksi tanpa memilih port terlebih dahulu. Setelah itu tekan connect dan akan
Gambar 4.50 Langkah 3 Memasang Program pada Robot
Selanjutnya pilih Tab Menu yaitu Menu Main seperti pada Gambar 4.50.
Kemudian pada Device and Signature Bytes, pilih jenis mikrokontroller robot.
Selanjutnya pilih menu Fuses, dibagian SUT_CKSEL, pilih Int. RC Osc 8 MH;
Start-up time; 6 CK + 64 ms, seperti pada Gambar 4.51.
Gambar 4.52 Langkah 5 Memasang Program pada Robot
Berikutnya pilih Menu Program, seperti pada Gambar 4.52. Klik tombol
titik-titik untuk memanggil file kode program robot dikomputer yang telah dibuat
sebelumnya, seperti pada Gambar 4.52. Selanjutnya akan keluar form Windows
Explorer seperti pada Gambar 4.53. Setelah file ditemukan, pilih file kemudian
klik tombol Open.
Gambar 4.54 Langkah 7 Memasang Program pada Robot
Selanjutnya klik tombol Program pada bagian Flash untuk proses
memasukkan kode program robot ke dalam robot atau ke dalam mikrokontroller
robot, dapat dilihat pada Gambar 4.54
4.4 Implementasi Seluruh Robot
Setelah semua proses perakitan selesai dan program robot telah diinputkan,
selanjutnya tekan tombol On/Off yang berwarna merah. Jika terjadi kesalahan
dalam pemasangan daya baterai atau yang lainnya, maka robot tidak akan bisa
hidup atau menyala. Tetapi jika semua proses telah berhasil dengan sempurna,
maka lampu robot akan menyala seperti pada Gambar 4.55
70
BAB V
UJI COBA DAN EVALUASI
Pada bab ini akan dibahas mengenai pengujian dan analisa pada hardware
yang telah dirancang. Tujuannya dari pengujian dan analisa ini adalah untuk
mengetahui apakah hardware tersebut telah berfungsi dengan benar dan sesuai
rencana atau tidak. Pengujian dan analisa ditunjukan pada pengujian komponen -
komponen yang terdapat pada robot serta pengujian robot untuk mendeteksi
adanya cahaya dari senter kemudian robot mengikuti atau berjalan kearah cahaya
tersebut.
[image:80.595.109.489.353.594.2]5.1 Pengujian Robot Mencari Cahaya
Gambar 5.1 Gerak Awal Robot
Setelah tombol On/Off pada robot ditekan, maka robot akan berputar 360o
terus menerus selama robot tidak menemukan adanya cahaya senter yang
Gambar 5.2 Robot Bergerak Maju
Setelah robot menerima rangsangan cahaya yang ditangkap oleh sensor
photodiode, maka robot akan bergerak k