APTIKOM
Supported by :
Konferensi Nasional
Pengembangan Teknologi Informasi
dan Komunikasi
Konferensi Nasional
Pengembangan Teknologi Informasi
dan Komunikasi
KeTIK 2014
KeTIK 2014
“Strategi Penerapan Teknologi Informasi
dan Komunikasi dalam Dunia Pendidikan”
Organized by :
Pokja TI IsDB
Institut Agama Islam Negeri Sumatera Utara
PROSIDING
PROSIDING
Editor:
Dr. M. Ridwan, MA
Zuhrinal M. Nawawi, MA
Asrizal, S.Kom
KeTIK 2014
Konferensi Nasional Pengembangan Teknologi
Informasi dan Komunikasi
Medan, 8 Nopember 2014
Editor:
Dr. M. Ridwan, MA
Zuhrinal M. Nawawi, MA
Asrizal, S.Kom
2014USU Press
Art Design, Publishing & Printing
Gedung F, Pusat Sistem Informasi (PSI) Kampus USU Jl. Universitas No. 9
Medan 20155, Indonesia
Telp. 061-8213737; Fax 061-8213737
usupress.usu.ac.id
© USU Press 2014
Hak cipta dilindungi oleh undang-undang; dilarang memperbanyak menyalin, merekam sebagian atau seluruh bagian buku ini dalam bahasa atau bentuk apapun tanpa izin tertulis dari penerbit.
ISBN 979 458 766 4
Perpustakaan Nasional: Katalog Dalam Terbitan (KDT)
Ketik 2014 : Konferensi Nasional Pengembangan Teknologi Informasi dan Komunikasi / M. Ridwan [et.al.].— Medan : USU Press, 2014
x, 148 p.; ilus.: 24 cm Bibliografi
ISBN: 979-458-766-4
1. Teknologi Informasi 2. Komunikasi I. Judul
KeTIK 2014 ISBN: 979-458-766-4 Konferensi Nasional Pengembangan Teknologi Informasi dan Komunikasi
336
MULTI OBJECT TRACKING BERBASIS VISI KOMPUTER DENGAN
METODE FRAME DIFFERENCE DAN DETEKSI TEPI
Muhammad Ikhsan#1, Samsudin#2
#1
Fakultas Ekonomi dan Bisnis Islam, UIN Sumatera Utara. #2Fakultas Ushuluddin, UIN Sumatera Utara mhd.ikhsan@gmail.com1, mr.samsudin@gmail.com2
ABSTRAK
Closed-circuit television (CCTV) adalah kamera pengawas yang umum digunakan saat ini.Selain memiliki fitur untuk merekam suatu kejadian pada area tertentu, kamera pengawas dapat pula kita manfaatkan sebagai data input pada visi komputer untuk melakukan proses multi object tracking.Dalam hal ini object yang akan dideteksi adalah pergerakan manusia sebagai unit masukan. Pada penelitian ini akan mepresentasikan bagaimana metode frame difference dapat digunakan untuk proses multi object tracking. Metode frame difference yaitu teknik untuk menghitung selisih antara dua frame yang selanjutnya dilakukan proses thresholdinglalu deteksi tepi untuk menghasilkan tepi objek citra. Selanjutnya hasil deteksi tepi dari proses frame difference akan merepresentasikan pergerakan objek dan tentunya hal ini dapat digunakan untuk proses berikutnya, misalkan deteksi gerak, menghitung jumlah pengunjung,mengetahuitrafik lalu lalang pengunjung pada sebuah fasilitas publik, dan hal lainnya.
Kata kunci: Multi Object Tracking, Frame Difference, Edge Detection, Computer Vision.
1.PENDAHULUAN
Pemasangan kamera pada tempat–tempat yang membutuhkan pengawasan ketat mulai diminati oleh banyak pihak. Karena dianggap mampu melingkupi wilayah yang luas sehingga diharapkan dapat meningkatkan keamanan. Karena lebih efektif dalam pemakaian tenaga manusia dan juga lebih efisien.
Selain untuk aspek pengawasan kamera pengawas dapat pula dimanfaatkan untuk melihat trafik pengunjung, bahkan malakukan perhitungan secara akurat jumlah orang yan berlalu-lalang pada areal tertentu.
Karena berhubungan dengan gerakan, maka yang menjadi input dalam sistem deteksi adalah klip video atau kumpulan frame image berukuran n×m yang merekam dan merepresentasikan gerakan manusia. Besarnya dimensi image frame tentunya memperlambat proses komputasi, oleh karenanya biasanya video frame yang digunakan adalah video yang beresolusi rendah dan telah dikonversi terlebih dahulu.
Salah satu cara untuk mengetahui selisih perbedaan frame adalah dengan menghitung perbedaan nilai-nilai intensitas pada suatu piksel dari dua frame gambar yang diambil secara berturut-turut yang kemudian dilakukan proses thresholding untuk menentukan adanya perubahan objek atau tidak. Thresholding adalah memisahkan antara objek dan latar belakangnya. Sedangkan untuk melakukan deteksi pada tepi objek dilakukan dengan proses Edge detection. Dan kemudian akan diproses dengan pengolahan citra dan computer vision sehingga kita dapat mengetahui perbedaan pada setiap frame-nya.
2.CITRA DIGITAL
Secara umum, pengolahan citra digital merujuk pada pemrosesan gambar dua dimensi
menggunakan komputer. Dalam konteks yang lebih luas pengolahan citra digital mengacu pada pemrosesan setiap data dua dimensi. Citra digital merupakan sebuah larik (array) yang berisi nilai-nilai real maupun komplek yang direpresentasikan dengan deretan bit tertentu.
3.COMPUTER VISION
Computer Vision adalah sebuah disiplin ilmu yang mempelajari proses menyusun deskripsi tentang objek yang terkandung pada suatu gambar atau mengenali objek yang ada pada gambar. Computer Vision berusaha menerjemahkan citra menjadi deskripsi atau suatu informasi yang merepresentasikan citra tersebut. Jadi, input-nya berupa citra, sedangkan output-nya berupa informasi.
Pengertian Computer Vision telah banyak dikemukakan para ahli atau pakar, antara lain :
Ballard dan Brown (1982:1) mendefinisikan Computer Vision sebagai suatu kegiatan awal pengotomatisan dan pengintregasian suatu pemrosesan dan representasi sebagai suatu persepsi visual dengan tahap-tahap tertentu.
Definisi lain yaitu dari Boyle dan Thomas (1988:1) memberi pengertian bahwa Computer Vision lebih dari hanya sekedar image recognition. Mereka juga menghadirkan operasi low level processing sebagai suatu algoritma pengolahan citra yang dapat kita sebut purely yang kemudian mengategorikan citra tersebut didalam suatu computer vision.
Saat ini kebutuhan akan aplikasi computer vision semakin meningkat. Hal ini didukung oleh munculnya prosesor berkecepatan tinggi dengan harga terjangkau serta kinerja kamera yang prima. Computer vision dipakai sebagai pengganti mata bagi komputer sehingga dapat menyelesaikan tugas yang sebelumnya tak dapat dilakukan.
ISBN: 979-458-766-4 KeTIK 2014 Konferensi Nasional Pengembangan Teknologi Informasi dan Komunikasi
337
4. KONVERSI CITRA BERWARNA (RGB) MENJADI CITRA GRAYSCALE
Citra berwarna memiliki nilai warna merah (red = ’R’), warna hijau (green = ‘G’) dan warna biru (blue = ‘B’) pada tiap pixel nya. Nilai warna tersebut tidak bisa kita lihat dengan kasat mata, sehingga kita harus memakai sebuah program untuk mengetahuinya. Dalampenelitian ini di gunakan software MATLAB 2014 untuk mengetahui nilai R, G, dan B pada tiap matriks yang terdapat pada citra.
Setelah kita mengetahui nilai R,G, dan B pada tiap matriks yang terdapat pada citra tersebut, maka kita akan melakukan proses perubahan citra warna menjadi citra grayscale dengan menggunakan rumus dibawah ini ;
Citra Gray = R + G + B …………. (1)
3
Untuk menghitung nilai tersebut, pada prinsip nya masing – masing nilai tersebut memiliki dimensi larik pada dimensi, yaitu red (R) pada dimensi 1, green (G) pada dimensi 2 dan Blue (B) pada dimensi 3.
Sebagai contoh akan dihitung konversi RGB ke grayscale pada citra berikut ini dengan matriks 7x7, seperti pada gambar dibawah ini :
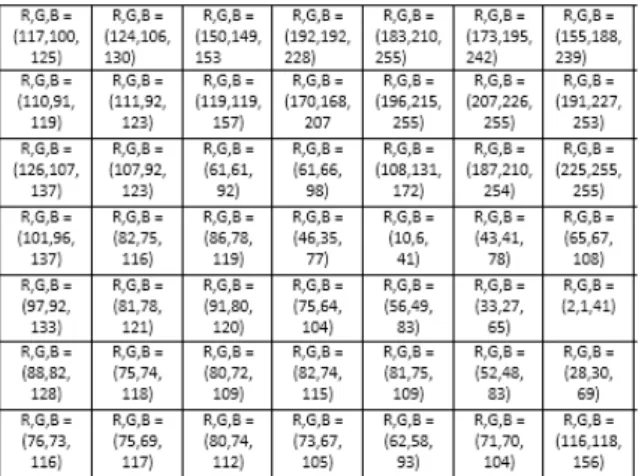
Gambar 1. Citra RGB dengan matrik 7x7 Adapun nilai intensitas RGB dari koordinat citra di atas adalah sebagai berikut:
Gambar 2.Nilai RGB Citra matrik 7x7 Misalnya pada citra tersebut nilai R, G dan B untuk pixel pada koordinat (x,y) =180,75 adalah :
R=117, G=100, B=125
Maka konversi citra warna menjadi citra grayscale pada pixel tersebut berdasarkan persaman (1) adalah : Citra gray = R + G + B 3 = 117 + 100 + 125 3 = 342 = 114 3
Maka hasil konversi citra warna menjadi citra grayscale untuk pixel koordinat (180,75) pada citra tersebut adalah 114. Dan begitu juga pada matriks lainnya sehingga menghasilkan nilai grayscale sebagai berikut :
Tabel 1. Konversi RGB ke grayscale pada citra di atas
5. METODE FRAME DIFFERENCE
Setelah merubah frame berwarna menjadi frame grayscale, maka tahap selanjutnya adalah melakuan proses frame difference.
Secara umum frame difference adalah mengurangkan nilai intensitas warna masing-masing pixel dari dua buah frame dan hasil pengurangan di bandingkan dengan nilai threshold (T = 127).
𝐷𝐷(𝑥𝑥, 𝑦𝑦) = �1,0, |𝑓𝑓|𝑓𝑓𝑘𝑘(𝑥𝑥, 𝑦𝑦) − 𝑓𝑓𝑘𝑘−1(𝑥𝑥, 𝑦𝑦)| ≥ 𝑇𝑇
𝑘𝑘(𝑥𝑥, 𝑦𝑦) − 𝑓𝑓𝑘𝑘−1(𝑥𝑥, 𝑦𝑦)| < 𝑇𝑇 … (2)
Nilai antara 0 sampai 127 pada citra grayscale akan diubah menjadi 0 atau warna hitam pada frame difference, sedangkan nilai antara 128 sampai 255 pada citra grayscale akan diubah menjadi 1 atau warna putih pada frame difference.
KeTIK 2014 ISBN: 979-458-766-4 Konferensi Nasional Pengembangan Teknologi Informasi dan Komunikasi
338
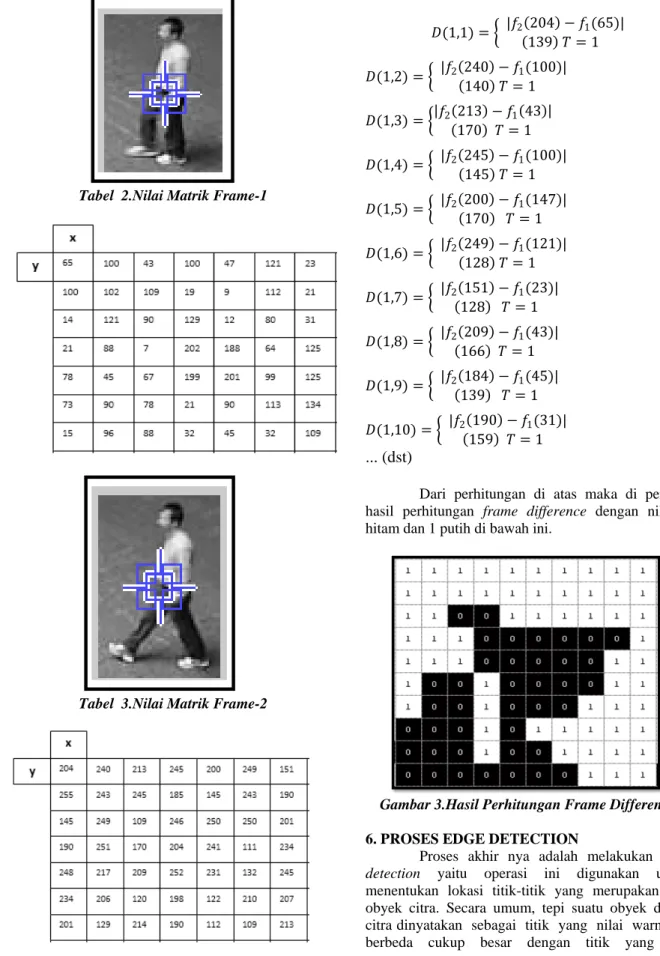
Sebagai contoh akan dihitung nilai frame difference pada gambar berikut ini dengan matriks 7x7 pada gambar dibawah ini :
Tabel 2.Nilai Matrik Frame-1
Tabel 3.Nilai Matrik Frame-2
Setelah kita mendapatkan dua buah gambar frame dan nilai matriknya, maka kita akan melakukan proses perhitungan frame difference dengan menggunakan rumus persamaan (2).
𝐷𝐷(1,1) = � |𝑓𝑓2(139) 𝑇𝑇 = 1 (204) − 𝑓𝑓1(65)| 𝐷𝐷(1,2) = � |𝑓𝑓2(240) − 𝑓𝑓(140) 𝑇𝑇 = 1 1(100)| 𝐷𝐷(1,3) = �|𝑓𝑓2(170) 𝑇𝑇 = 1 (213) − 𝑓𝑓1(43)| 𝐷𝐷(1,4) = � |𝑓𝑓2(245) − 𝑓𝑓1(100)| (145) 𝑇𝑇 = 1 𝐷𝐷(1,5) = � |𝑓𝑓2(200) − 𝑓𝑓1(147)| (170) 𝑇𝑇 = 1 𝐷𝐷(1,6) = � |𝑓𝑓2(249) − 𝑓𝑓1(121)| (128) 𝑇𝑇 = 1 𝐷𝐷(1,7) = � |𝑓𝑓2(128) 𝑇𝑇 = 1(151) − 𝑓𝑓1(23)| 𝐷𝐷(1,8) = � |𝑓𝑓2(166) 𝑇𝑇 = 1 (209) − 𝑓𝑓1(43)| 𝐷𝐷(1,9) = � |𝑓𝑓2(184) − 𝑓𝑓1(45)| (139) 𝑇𝑇 = 1 𝐷𝐷(1,10) = � |𝑓𝑓2(190) − 𝑓𝑓1(31)| (159) 𝑇𝑇 = 1 ... (dst)
Dari perhitungan di atas maka di peroleh hasil perhitungan frame difference dengan nilai 0 hitam dan 1 putih di bawah ini.
Gambar 3.Hasil Perhitungan Frame Difference
6. PROSES EDGE DETECTION
Proses akhir nya adalah melakukan edge detection yaitu operasi ini digunakan untuk menentukan lokasi titik-titik yang merupakan tepi obyek citra. Secara umum, tepi suatu obyek dalam citra dinyatakan sebagai titik yang nilai warnanya berbeda cukup besar dengan titik yang ada
ISBN: 979-458-766-4 KeTIK 2014 Konferensi Nasional Pengembangan Teknologi Informasi dan Komunikasi
339 disebelahnya. Operator yang digunakan adalah
prewitt. Bentuk kernel dari operator prewitt adalah :
Operator prewitt tidak menekankan pembobotan pada piksel-piksel yang lebih dekat dengan titik pusat kernel.
1. Nilai intensitas warna citra awal f(1,1) – f(3,3) di kali dengan operator Gx(1,1) – Gx(3,3):
Px = | (-1*8) + (-1*5) + (-1*2) + (1*9) + (1*112) + (1*98) | = 204
2. Nilai intensitas warna citra awal f(1,1) – f(3,3) di kali dengan operator Gy(1,1) – Gy(3,3):
Py = | (1*2) + (1*94) + (1*98) + 1*8) + 1*5) + (-1*9) | = 172
P = √ 2042 + 1722 = 266
3. Nilai intensitas warna citra awal f(2,1) – f(4,3) di kali dengan operator Gx(1,1) – Gx(3,3):
Px = | (-1*5) + (-1*2) + (-1*7) + (1*112) + (1*98) + (1*103) | = 299
4. Nilai intensitas warna citra awal f(2,1) – f(4,3) di kali dengan operator Gx(1,1) – Gx(3,3):
Py = | (1*7) + (1*106) + (1*103) + 1*5) + (-1*93) + (-1*112) | = 6
P = √ 2992 + 62 = 299
Proses ini dilakukan seterusnya hingga seluruh pixel di masking.
7. PENGUJIAN
Dalam pengujian ini akan diambil 5 gambar pergerakan objek manusia untuk dianalisa perbedaan antara frame dan hasil akan ditunjukkan melalui 2 (dua) buah tampilan video, dimana video pertama untuk menampilkan tampilan multi object tracking dan yang kedua untuk menampilkan hasil perhitungan perbedaan frame (frame difference) antara dua objek. Video tersebut juga akan ditampilkan seperti yang ditunjukan pada gambar dibawah ini.
1. Frame difference di ambil pada menit ke 02:20 detik.
2. Frame difference di ambil pada menit ke 02:23 detik.
3. Frame difference di ambil pada menit ke 02:27 detik.
KeTIK 2014 ISBN: 979-458-766-4 Konferensi Nasional Pengembangan Teknologi Informasi dan Komunikasi
340
4. Frame difference di ambil pada menit ke 02:36 detik.
8. KESIMPULAN
Berdasarkan dari hasil analisa dan uraian data pada penelitian ini serta implementasi metode frame difference makadiperoleh beberapa kesimpulan, yaitu:
1. Frame difference adalah salah satu metode yang dapat digunakan untuk melakukan proses multi object tracking, yang mampu memprediksi pergerakan manusia melalui input video dari kamera pengawas (CCTV).
2. Hasil dari metode Frame Difference yang diproses kembali dengan Edge Detection metode Prewitt mampu melakukan proses deteksi pergerakan manusia dengan komputasi yang tidak terlalu tinggi.
3. Penerapan metode Multi Object Tracking ini dapat digunakan untuk menghitung jumlah pengunjung (visitor) dari sebuah publik area,
melihat deteksi pergerakan, mengetahui traffic pengunjung dan sebagainya.
DAFTAR PUSTAKA
Bovik A, C., (2009). The Essential Guide to Video Processing, Academic Press USA.
Castleman, Kenneth R., (2004). Digital Image Processing, Vol. 1, Ed.2, Prentice Hall,New Jersey.
Gonzalez. R. C, Woods. R. E.,(2008). Digital Image Processing third Edition, Pearson Prentice Hall, New Jersey.
Jahne, B., Haubecker, H., Geibler, P., (1999). Handbook Of Computer Vision And Applications, Volume 2, Signal Processing and Pattern Recognition, Accademic Press.
Jain, A.K., (1989). Fundamental of Digital Image Processing, Prentice Hall, Inc.,Singapore.
Low, A.,(1991). Introductory Computer Vision andImage Processing, McGraw Hill, UK.
Munir, R., (2004). Pengolahan Citra Digital dengan Pendekatan Algoritmik, Informatika Bandung. Murni, A. dan S. Setiawan, (1992). Pengantar
Pengolahan Citra, Elex Media Komputindo, Jakarta.
Nixon, M, S., Aguado, A, S., (2008). Feature Extractionand Image Processing second edition., Academic Press.
Pitas, I., (1993). Digital Image Processing Algorithms, Prentice Hall, Singapore.
Robert Laganiere, (2011) OpenCV 2 Computer Vision Application Programming Cook Book, Packt Publishing, Birmingham, UK.
Organized by :
Pokja TI IsDB
Institut Agama Islam Negeri Sumatera Utara
APTIKOM
Supported by :
9 789794 587669 90000