1
BAB I
PENDAHULUAN
I.1. Latar BelakangKebutuhan data pengukuran terestris menuntut pemenuhan aspek efisien, efektif, presisi dan akurat. Perkembangan ilmu pengetahuan dan teknologi dalam lingkup survei terestris terus berkembang mengikuti kebutuhan yang semakin besar tersebut. Teknologi peralatan survei terus mengalami kemajuan sehingga memberikan kemudahan dalam akuisisi dan pengolahan data dengan hasil yang presisi dan akurat. Teknologi terkini dalam bidang survei terestris tersebut dikenal dengan metode Laser Scanning dengan alat Terrestrial Laser Scanner (TLS).
Terrestrial Laser Scanner (TLS) merupakan alat pemindai yang mampu
menghasilkan suatu kenampakan dari obyek yang diukur dalam bentuk 3D. TLS menggunakan teknologi laser untuk memindai (scan) obyek yang ada disekitarnya. Obyek hasil pemindaian berupa titik-titik (points) obyek dengan kerapatan tertentu dikenal dengan sebutan point clouds yang terletak dalam scan world. Tingkat kerapatan yang diperoleh dari hasil pemindaian sebuah TLS dapat memberikan hasil pengukuran yang presisi. Pengukuran dengan metode laser scanner memberikan keuntungan dalam akuisisi dan pengolahan data. Proses akuisisi dengan pemindaian (scan) akan mengambil seluruh data obyek berupa points yang terlihat oleh instrumen.
Pembuatan obyek 3D menggunakan instrumen TLS melalui beberapa tahapan, yaitu tahap perencanaan, tahap akuisisi data, tahap registrasi, dan tahap pemodelan 3D. Tahapan registrasi merupakan tahap yang sangat menentukan dalam mencapai hasil pemodelan 3D, karena dalam tahapan ini dilakukan penggabungan antar scan
world dari beberapa kedudukan instrumen sehingga diperoleh satu kesatuan point clouds dalam bentuk 3D.
Hasil proses registrasi harus memiliki ketelitian tinggi agar point clouds dari beberapa scan world teregistrasi dengan sempurna. Registrasi data TLS terdiri dari beberapa metode, diantaranya adalah metode target to target, metode cloud to cloud, dan metode kombinasi. Berdasarkan ketiga metode yang telah disebutkan
sebelumnya, terdapat perbedaan langkah pengolahan point clouds di masing-masing metode. Faktor kecepatan dan ketelitian dalam pengolahan bergantung pada metode registrasi yang akan digunakan.
Metode registrasi berpengaruh dalam menentukan kualitas geometri model dan keakuratan data yang dihasilkan, dimana ukuran dan bentuk obyek juga sangat berpengaruh dalam proses registrasi ini. Ukuran obyek berpengaruh pada konsumsi waktu yang digunakan dalam proses registrasi target to target dan cloud to cloud sedangkan untuk bentuk obyek berpengaruh pada kemudahan proses registrasi terutama pada metode cloud to cloud. Semakin besar ukuran obyek dan rumit bentuk, proses registrasi akan semakin sulit dan perlu dilakukan dengan cermat untuk menjaga akurasi hasil registrasi terutama untuk metode cloud to cloud. Berdasarkan hal tersebut, maka perlu dilakukan kajian perbandingan beberapa metode registrasi terutama untuk obyek berdimensi besar.
Beberapa penelitian terdahulu telah melakukan kajian serupa, tetapi kebanyakan dilakukan pada obyek yang relatif kecil. Belum adanya penelitian yang mengkaji perbedaan hasil registrasi antara metode target to target dan metode cloud
to cloud pada obyek dengan dimensi yang besar menjadi alasan utama pelaksanaan
penelitian ini. Obyek yang dikaji pada penelitian ini adalah berupa stockpile batubara di PLTU Lontar yang berdimensi besar, dengan ukuran 340 m x 60 m.
I.2. Rumusan Masalah
Proses registrasi scan world merupakan tahapan yang sangat menentukan dalam pembentukan model 3D. Belum ada kajian berbagai metode registrasi metode
target to target dan cloud to cloud dengan obyek yang berdimensi besar. Untuk itu
perlu dilakukan penelitian berbagai metode registrasi target to target dan cloud to
cloud menggunakan obyek berdimensi besar.
I.3. Pertanyaan Penelitian
Berdasarkan rumusan masalah tersebut, berikut ini merupakan pertanyaan penelitian dalam analisis proses registrasi data point clouds pada software faro scene antara metode cloud to cloud dan target based.
1. Bagaimana perbedaan hasil registrasi metode target to target dan metode cloud
to cloud pada obyek dengan dimensi yang besar.
2. Apa saja keunggulan dan kekurangan dari masing-masing metode registrasi terkait dengan obyek berdimensi besar.
I.4. Cakupan Penelitian
Cakupan penelitian dalam proses registrasi data point clouds pada software faro
scene antara metode cloud to cloud dan target based adalah sebagai berikut.
1. Obyek kajian adalah stockpile batubara PLTU Lontar yang terletak di Desa Lontar, Kecamatan Kemiri, Kabupaten Tangerang, Propinsi Banten. Stockpile tersebut di kategorikan dalam obyek berdimensi besar dengan ukuran dimensi panjang 340 m dan lebar 60 m.
2. Akuisisi data lapangan menggunakan Terrestrial Laser Scanner Faro Focus3D X330.
3. Registrasi data scan world menggunakan metode target to target dan metode
cloud to cloud dengan software faro scene.
4. Pengolahan data untuk proses cleaning dan pengambilan sampel uji point
clouds menggunakan software Cyclone 6.0.
5. Uji perbandingan antara dua buah hasil registrasi menggunakan uji perbandingan RMS registrasi, uji model space, uji statistik dan uji posisi.
I.5. Tujuan Penelitian Tujuan dari penelitian ini adalah sebagai berikut :
1. Melakukan perbandingan dan analisis hasil registrasi antara metode target to
target dan cloud to cloud pada obyek berdimensi besar.
2. Mengetahui keunggulan dan kekurangan dari masing-masing metode registrasi terkait dengan obyek berdimensi besar.
I.6. Manfaat
Manfaat dari penelitian ini adalah mengetahui keunggulan dan kekurangan dari metode registrasi target to target dan metode cloud to cloud pada software faro scene pada obyek dengan dimensi yang besar. Berdasarkan hasil analisis tersebut dapat
diketahui metode mana yang lebih efektif dan efisien dalam melakukan registrasi data point clouds pada dimensi obyek berdimensi besar.
I.7. Tinjauan Pustaka
Studi registrasi point clouds pada pemrosesan data terrestrial laser scanner memberikan hasil bahwa data hasil pengukuran TLS memiliki tingkat ketelitian yang mumpuni dalam hal akuisisi data (Nandaru, 2014). Hasil registrasi menggunakan metode target to target lebih unggul dalam hal ketelitian dibandingkan dengan metode cloud to cloud. Hasil registrasi metode target to target memiliki nilai RMS yaitu 0,0015 m sedangkan metode cloud to cloud memiliki nilai RMS yaitu 0,009 m. Perbandingan panjang sisi obyek antara pengukuran TLS dan ETS diperoleh nilai RMS sebesar 0,00581 m metode target to target dan 0,0084 untuk metode cloud to
cloud.
Pemodelan bangunan cagar budaya gereja blenduk untuk konservasi dengan metode terrestrial laser scanner menyimpulkan bahwa hasil ukuran TLS setelah proses georeferencing mendekati dengan ukuran Electronic Total Station (Arfianto, 2014). Pada jurnal yang ditulis oleh Arfianto menuliskan bahwa selisih antara dua metode pengukuran tersebut disimpulkan dalam bentuk uji statistik
Perbandingan metode registrasi target to target, cloud to cloud dan kombinasi untuk data hasil pengukuran menggunakan terrestrial laser scanner juga dilakukan oleh Kusuma (2010). Kusuma melakukan akuisisi data terhadap obyek berupa tugu teknik dan menyimpulkan bahwa registrasi dengan metode kombinasi memiliki ketelitian lebih baik dibanding yang lainnya. Urutan tingkat ketelitian metode registrasi yang diperoleh adalah metode kombinasi sebagai yang terbaik, kemudian
target to target dan yang terakhir adalah metode cloud to cloud.
Berdasarkan beberapa sumber yang telah ada, belum ada uji registrasi point
clouds menggunakan metode target to target dan cloud to cloud pada obyek yang
I.8. Landasan Teori I.8.1. Terrestrial laser scanner
Terrestrial Laser Scanner (TLS) adalah instrumen yang menggunakan cahaya
laser untuk mengukur titik-titik dalam sebuah pola secara langsung dalam tiga dimensi dari suatu permukaan obyek, dari sebuah tempat di permukaan bumi. Hasil yang didapatkan dari pengukuran TLS ini adalah awan titik (point clouds) yang memiliki koordinat tiga dimensi lokal terhadap tempat berdiri alat. Point clouds adalah kumpulan titik-titik dalam jumlah banyak yang dapat digunakan sebagai bahan pembuatan model tiga dimensi. Dalam hal teknik pengukuran, TLS dibagi menjadi dua buah metode, yaitu metode statik dan dinamik (Shan, 2009). Prinsip dari metode statik adalah menempatkan alat TLS di lokasi yang tetap (tidak bergerak). Keuntungan metode ini adalah ketelitian yang tinggi dan jumlah titik yang lebih banyak. Prinsip metode dinamik adalah menempatkan alat TLS pada wahana bergerak seperti pesawat terbang, pesawat tanpa awak dan sebagainya. Metode ini membutuhkan komponen tambahan seperti GPS atau INS (Inertial Navigation
System) yang menyebabkan metode ini lebih kompleks dan mahal (Shan, 2009). Laser scanner pada prinsipnya mengukur jarak dengan menggunakan laser
memanfaatkan sensor aktif. Terdapat dua jenis metode pengukuran jarak dengan TLS yang umum digunakan, yakni Pulse Based (Time-of-Flight) dan Phase Base (Paffenholz, 2012). Dalam penelitian ini, alat TLS yang digunakan adalah Faro Focus3D X330 menggunakan metode pengukuran pulse based. Prinsip kerja pulse
based adalah pengukuran yang didasarkan kepada waktu tempuh gelombang laser
sejak dipancarkan sampai diterima kembali oleh penerima pulsa laser tersebut. Waktu tempuh tersebut digunakan untuk menghitung jarak antara alat TLS dengan target. Perhitungan jarak tersebut dapat dilihat pada persamaan I.1 dan ilustrasinya dapat dilihat pada Gambar I.1.
Jarak D dihitung dengan persamaan (Reshetyuk, 2009): 𝐷 = 1
2 × 𝑐 × ∆𝑡 ... (I.1) Keterangan : D : jarak dari alat ke obyek
c : kecepatan rambat gelombang (m/s) Δt : waktu tempuh (s)
Gambar I.1 Ilustrasi pengukuran jarak pulse based (Diadaptasi dari Quintero, 2008)
Pada dasarnya perhitungan koordinat pada titik-titik point clouds menggunakan prinsip aturan tangan kanan kartesian 3D dengan pusat sumbu koordinat pada pusat
scanner. Orientasi sumbu-sumbu koordinat dari laser scanner yaitu : sumbu Y+
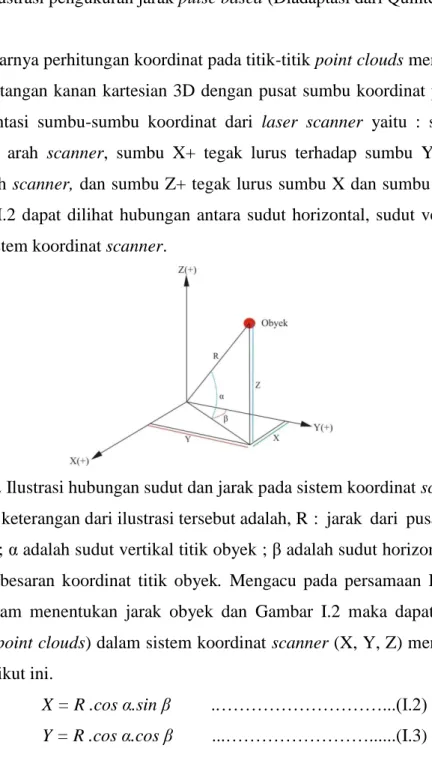
searah dengan arah scanner, sumbu X+ tegak lurus terhadap sumbu Y+ ke arah kanan dari arah scanner, dan sumbu Z+ tegak lurus sumbu X dan sumbu Y ke arah atas. Gambar I.2 dapat dilihat hubungan antara sudut horizontal, sudut vertikal dan jarak dalam sistem koordinat scanner.
Gambar I.2 Ilustrasi hubungan sudut dan jarak pada sistem koordinat scanner. Adapun keterangan dari ilustrasi tersebut adalah, R : jarak dari pusat scanner ke titik obyek ; α adalah sudut vertikal titik obyek ; β adalah sudut horizontal obyek. X,Y,Z adalah besaran koordinat titik obyek. Mengacu pada persamaan I.1 sebagai persamaan dalam menentukan jarak obyek dan Gambar I.2 maka dapat diketahui posisi obyek (point clouds) dalam sistem koordinat scanner (X, Y, Z) menggunakan persamaan berikut ini.
X = R .cos α.sin β ..………...(I.2) Y = R .cos α.cos β ...………...(I.3)
Z = R .sin α .………...(I.4) Dimana:
R : Jarak dari scanner ke titik obyek. α : Sudut vertikal titik obyek.
β : Sudut horizontal obyek. X,Y,Z : Koordinat titik point clouds.
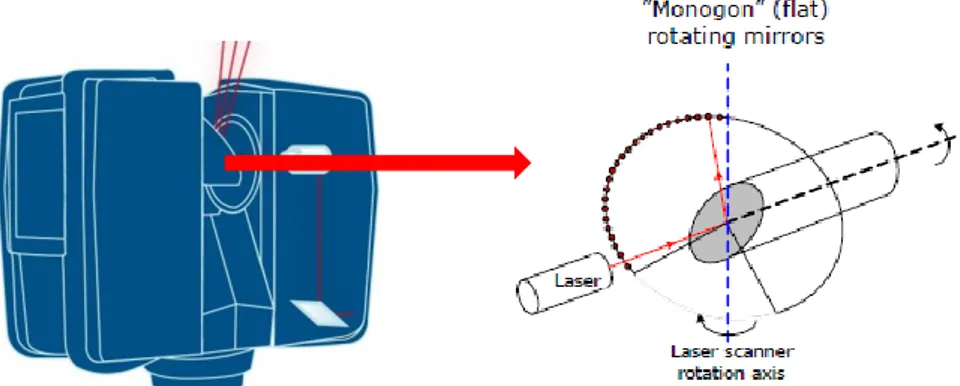
Sistem penyiaman laser yang digunakan dalam TLS Faro adalah monogon (flat)
mirror. Laser dipantulkan melalui cermin datar pada instrumen yang kemudian
menuju obyek dan kembali menuju sensor penerima. Instrumen TLS yang digunakan memiliki sistem pemantulan laser seperti Gambar I.3.
Gambar I.3 Ilustrasi pemantulan laser monogon (Reshetyuk, 2009)
Proses penyiaman (scanning) akan membentuk satu buah scan world yang terdiri dari point clouds. Dalam satu rangkaian proses akuisisi data di lapangan, proses penyiaman daat berlangsung berkali-kali untuk memperoleh seluruh sisi obyek. Berdasarkan banyaknya proses penyiaman maka akan terbentuk jumlah scan
world yang banyak pula. Oleh karena itu diperlukan proses registrasi untuk
menggabungkan beberapa scan world tersebut agar menjadi sempurna sebagai model 3D.
I.8.2. Registrasi
Pengukuran menggunakan laser scanner pada obyek berdimensi besar tidak dapat dilakukan dengan satu kali berdiri alat. Jumlah scan world yang lebih dari satu perlu digabung menjadi satu kesatuan sempurna. Proses registrasi adalah tahap yang menggabungkan beberapa scan world yang berbeda dari proses akuisisi data yang
kemudian menjadi satu kesatuan point clouds. Pada dasarnya penggabungan scan
world tersebut melalui transformasi koordinat sebangun 3D. Dalam hal ini proses
translasi dan rotasi antar scan world sehingga tergabung menjadi point cloud dalam satu sistem koordinat. Adapun syarat dari proses registrasi dua buah scan world yakni memiliki overlap antara satu scan dengan yang lainnya.
Pada Gambar I.4 merupakan ilustrasi sistem koordinat scanner dari dua buah kedudukan instrumen TLS yang menghasilkan dua buah scan world. Proses transformasi pada scan 2 ke dalam sistem koordinat scanner 1 membutuhkan 6 buah parameter yakni 3 buah translasi (X, Y, Z) dan 3 buah rotasi (, , ) (Reshetyuk, 2009).
Gambar I.4 Ilustrasi sistem koordinat scanner (Reshetyuk, 2009)
Registrasi scan world dapat dilakukan dengan beberapa metode. Metode tersebut adalah target to target, cloud to cloud, kombinasi, traverse. Pada penelitian ini fokus terhadap registrasi target to target dan cloud to cloud.
I.8.2.1. Registrasi target to target. Registrasi target to target pada dasarnya adalah proses penggabungan beberapa data scan world dari proses akuisisi data menggunakan target sebagai acuannya. Target yang digunakan dalam proses akuisisi data dapat berbentuk flat targets dan 3D shaped targets (Gordon dan Lichti, 2004 dalam Reshetyuk, 2009). Flat targets adalah tipe target yang cukup familiar ditemukan dalam proses akuisisi data, adapun bentuk dari flat targets seperti
3D shaped targets merupakan jenis lain target dengan bentuk sperical, terdapat keuntungan tersendiri dalam penggunaan target jenis ini. Keuntungan spherical dibandingkan flat targets yakni dapat mudah di identifikasi dari berbagai arah penyiaman oleh instrumen TLS dibandingkan flat targets yang dibatasi oleh sudut arah pandang instrumen TLS. Dalam proses akuisisi data di lapangan diperlukan minimal 3 buah target agar dapat dilakukan langkah registrasi dengan metode target
to target. Adapun tampilan dari target sphere secara visual dapat dilihat pada
Gambar I.5.
Gambar I.5 Target sphere TLS Faro Focus 3D X330
Adapun ilustrasi dari persebaran target dalam proses akuisisi data dapat dilihat pada Gambar I.6
Gambar I.6 Ilustrasi registrasi target based (Reshetyuk, 2009)
Persebaran target saat akuisisi data harus optimal dalam rangka untuk memperoleh hasil dengan ketelitian yang tinggi. Bentuk sebaran yang buruk akan memberikan dampak kurang baiknya proses hasil registrasi dengan metode target to
target. Adapun bentuk persebaran target yang baik menurut dapat terlihat pada
Gambar I.7.
Gambar I.7 Konfigurasi persebaran target (Reshetyuk,2009)
I.8.2.2. Registrasi cloud to cloud. Registrasi cloud to cloud memiliki tujuan yang serupa dengan proses registrasi metode target based. Perbedaan menonjol diantara metode ini terletak pada penggunaan acuan dalam proses registrasinya. Pada registrasi cloud to cloud tidak memerlukan target acuan seperti halnya metode target
based. Hal tersebut didasarkan pada proses registrasi cloud to cloud yang
menggunakan prinsip penggabungan point clouds dengan bentuk yang sama. Adapun syarat dari proses registrasi cloud to cloud adalah memiliki overlap yang cukup agar obyek yang sama dapat dengan mudah diidentifikasi. Gambar I.8 merupakan ilustrasi dari penggabungan beberapa point clouds dengan menggunakan metode cloud to
cloud.
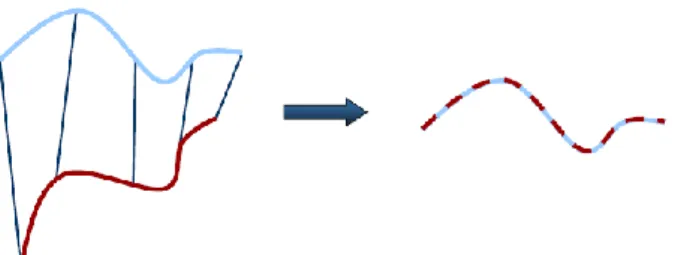
Gambar I.8 Ilustrasi penggabungan point clouds (Pfeifer, 2007).
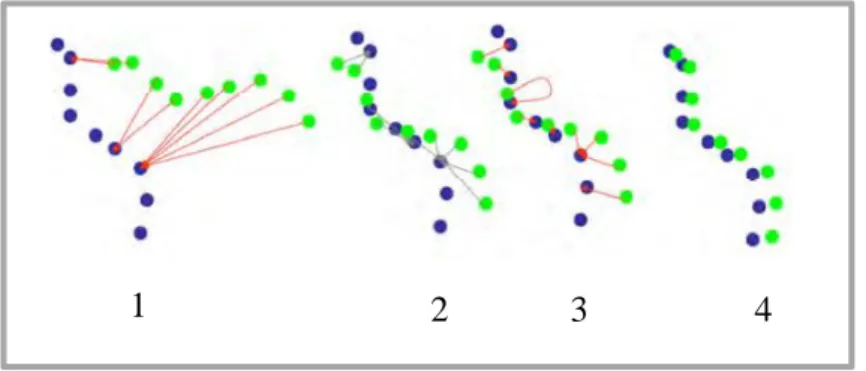
Gambar I.8 menunjukkan ilustrasi perubahan posisi dari point clouds hijau untuk menyesuaikan bentuk terhadap posisi point clouds berwarna biru. Pada Gambar I.8 terlihat nomor urut 1 hingga 4 yang menunjukkan urutan proses tersebut. Pada nomor urut 1 menunjukkan terdapat dua buah scan world, yakni scan world biru dan hijau. Pada ilustrasi Gambar I.8 menunjukkan bahwa scan world biru merupakan scan world yang dianggap tetap sebagai referensi dan scan world hijau merupakan scan world bebas. Pada nomor urut 1, tampak point clouds scan world hijau mencari posisi terdekat dengan point clouds scan world biru. Pada nomor urut
2, scan world hijau mulai mengalami proses matching dengan scan world biru kemudian kembali melakukan proses pencarian jarak terdekat pada masing-masing titik clouds di scan world biru. Pada nomor urut 3, terjadi proses penolakan terhadap beberapa opsi jarak yang telah ada apabila tidak sesuai/relevan dengan bentuk point
clouds secara umum. Pada nomor urut 4, tampak scan world hijau dan biru sudah matching bentuk dan posisinya. Menurut Reshetyuk, terdapat dua cara registrasi cloud to cloud, diantaranya adalah registrasi surface matching (Gambar I.9) dan
registrasi menggunakan bentuk geometri obyek yang serupa (Gambar I.10).
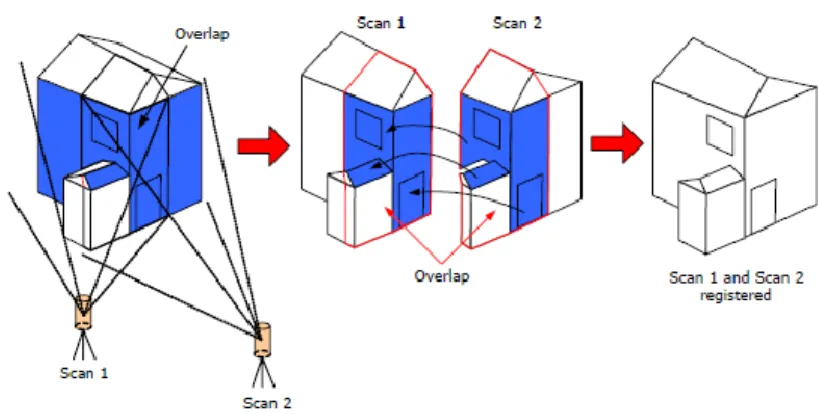
Gambar I.9 Ilustrasi registrasi cloud to cloud menggunakan surface matching (Reshetyuk, 2009).
Berdasarkan ilustrasi Gambar I.9 dapat terlihat bahwa scan world 1 (hijau) dan
scan world 2 (biru) tergabung berdasarkan overlap terhadap obyek yang sama.
Obyek sama tersebut merupakan dinding, jendela, atap dan lainnya. Registrasi cloud
to cloud menggunakan surface matching pada dasarnya mencocokkan seluruh
permukaan obyek yang saling overlap sehingga memperoleh hasil registrasi yang sempurna.
Gambar I.10 Ilustrasi registrasi cloud to cloud menggunakan bentuk geometrik obyek yang serupa (Reshetyuk, 2009).
Berdasarkan Gambar I.10 dapat terlihat bahwa objek point clouds mengalami registrasi cloud to cloud menggunakan bentuk geometrik yang serupa. Operasi cloud
to cloud menggunakan bentuk geometrik obyek yang serupa ini pada dasarnya
digunakan dengan menggabungkan obyek yang sama pada masing-masing scan
world. Tahapan registrasi ini dapat dilakukan saat obyek utama merupakan bangunan
tetap namun sulit untuk dilakukan pada obyek dengan bentuk abstrak (stockpile, pepohonan dll).
I.8.3. Iterative Closest Point
Iterative Closest Point (ICP) adalah konsep algoritma standar yang digunakan
dalam menghitung korespondensi antara dua buah scan dan menghitung besaran transformasi untuk meminimalisir jarak antara titik yang saling terkorespondensi (Segal, 2016). Kelebihan utama dari metode ICP adalah sederhana dan relatif lebih cepat dalam hal performa pengolahan ketika menggunakan k-d tree untuk mencari titik terdekat. K-d tree adalah data struktur yang bersifat space-partitioning yang bertujuan untuk mengatur titik-titik dalam k-dimensional tree (Gosno, 2013). K-d
tree umumnya diaplikasikan dalam pencarian yang memiliki range search dan nearest neighbor search (Berg M, 2008). Menurut Rusinkiewicz 2001 dalam Colas
2011, menyatakan bahwa terdapat 6 langkah utama dalam algoritma proses ICP. Langkah tersebut adalah preprocessing, matching, weighting, rejection, error, dan
minimization. Proses algoritma ICP akan terus mengalami iterasi hingga point clouds menyatu. Iterasi tersebut berlangsung pada proses matching hingga minimization. Gambar I.11 merupakan ilustrasi dari dua buah hasil scan world yang
digabung menjadi satu buah scan utuh melalui proses ICP.
Langkah-langkah utama dalam algoritma ICP adalah preprocessing, matching,
weighting, rejection, error, dan minimization. Point clouds hasil akuisisi data
mengalami keenam langkah tersebut saat melakukan proses registrasi. Untuk mengetahui secara jelas proses tersebut, maka berikut ini adalah penjelasan dari masing-masing tahapan tersebut.
(a) Preprocessing
Tahapan preprocessing adalah tahapan pemilihan point clouds yang akan masuk kedalam tahapan matching. Pada proses ini point clouds yang dianggap sebagai
noise akan di abaikan dan dihilangkan dari proses pengolahan.
(b) Matching
Tahapan matching adalah tahapan untuk proses pengelompokan point clouds berdasarkan obyek yang sama. Tahapan ini menggunakan sistem pencarian
neighbor dengan radius pencarian telah tertentu. Sistem pencarian neighbor
sering juga disebut dengan proses k-d tree. Proses ini menggunakan titik tengah dari scan world sebagai titik awal kemudian membagi tengah scan world sehingga memperoleh empat buah segmen. Lalu dari masing-masing segmen dibagi menjadi segmen lebih kecil sehingga diperoleh kelompok-kelompok kecil
point clouds dalam satu segmen. Ilustrasi dari proses pembagian segmen ini
dapat dilihat pada Gambar I.12.
Gambar I.12 Ilustrasi k-d tree (Colas, 2011)
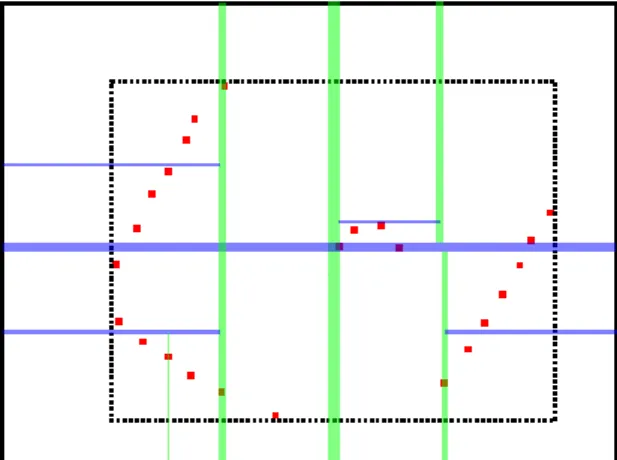
Hasil pembagian zona-zona/segmen tersebut akan mempermudah dalam pengelompokan obyek (point clouds) yang kemungkinan sama. Sebagai contoh dari pengelompokan tersebut dapat dilihat pada Gambar I.13.
Gambar I.13 Ilustrasi matching k-d tree (Colas, 2011)
Pada Gambar I.13 tampak bahwa masing-masing segmen kecil memiliki point
clouds. Segmen kecil tersebut merupakan hasil pembagian dari k-d tree. Proses k-d tree ini akan memudahkan dan mempercepat dalam proses mencari pasangan point clouds. Logikanya yakni perangkat lunak akan melaksanakan pencarian
menggunakan algoritma tertentu untuk kesamaan point clouds pada segmen yang memiliki titik saja. Sedangkan untuk segmen yang tidak memiliki poit
clouds (kosong) akan diabaikan sehingga akan mempersingkat waktu proses
pencarian. (c) Weighting
Tahapan weighting memilih titik yang perlu dan tidak perlu digunakan dalam proses ICP.
(d) Rejecting
Proses ini adalah proses penghapusan pada beberapa data yang telah lolos dari proses weighting karena terdapat titik dengan multiple pasangan.
(e) Error
Tahapan Error adalah tahapan perhitungan elemen-elemen transformasi tiap-tiap titik. Perhitungan tersebut dapat dibagi dalam dua jenis, yakni point to point dan
point to plane. Gambar I.14 dan Gambar I.15 adalah masing-masing ilustrasi
dari point to point dan point to plane.
Gambar I.15 Ilustrasi point to plane (Burgard, 2011) (f) Minimization
Tahapan minimization adalah tahapan penerapan parameter transformasi yang telah diketahui berdasar pada proses error.
Setelah tahapan ini, terkadang point clouds belum tergabung secara sempurna, oleh karena itu diperlukan iterasi proses ICP. Iterasi tersebut dilakukan pada proses
matching hingga minimization sampai memperoleh point clouds yang tergabung
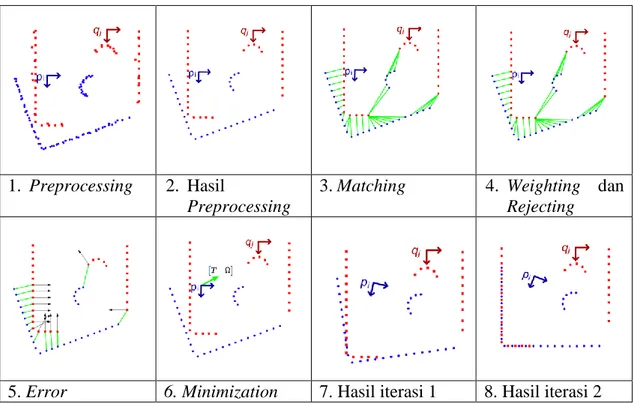
secara utuh. Pada Tabel I.1 berikut ini adalah ilustrasi dari masing-masing langkah algoritma ICP.
Tabel I.1 Ilustrasi tahapan proses ICP (diadaptasi dari Colas 2011)
1. Preprocessing 2. Hasil
Preprocessing
3. Matching 4. Weighting dan
Rejecting
Pada Tabel I.1 merupakan ilustrasi secara umum proses dari ICP dari awal hingga akhir yang mana dimuai dari nomor urut 1 hingga 8. Tabel I.1 terlihat terdapat dua buah contoh scan world, yakni merah dan biru. Scan world merah dianggap sebagai scan world tetap/referensi sehingga scan world biru perlu menyesuaikan terhadap scan world merah. Tahapan pada nomor urut 1 yakni
preprocessing, tahapan ini masing-masing point clouds pada scan world akan
dilakukan sampling dan penghapusan titik yang dianggap noise. Sampling tersebut bertujuan untuk memilih titik yang akan digunakan dalam proses ICP. Selanjutnya pada nomor 2 merupakan point clouds hasil sampling dan telah terpilih sebagai point
clouds yang mewakili bentuk sesungguhnya. Tahapan nomor 3 merupakan matching,
proses ini adalah pencarian jarak terdekat dari titik pada scan world biru. Scan world biru akan mencari jarak terdekat terhadap titik pada scan world merah. Tahapan selanjutnya adalah weighting dan rejecting merupakan tahapan selanjutnya setelah proses matching. Tahapan keempat ini akan memilih dan menolak hasil pencarian jarak titik pada proses matching yang tidak relevan/sesuai. Tahapan kelima yakni
error. Pada tahap ini akan menghitung nilai kesalahan/nilai perpindahan yang perlu
dilakukan scan world biru agar tergabung ke scan world merah. Selanjutnya adalah tahapan minimization. Pada tahapan ini scan world biru melakukan perpindahan (transformasi) ke scan world merah sesuai dengan nilai error yang telah diketahui. Tahapan nomor urut 7 adalah hasil dari transformasi scan world biru ke scan world merah. Terlihat bahwa scan world tersebut belum menyatu secara sempurna, oleh karena itu perlu dilakukan iterasi sehingga menghasilkan point clouds yang tergabung utuh seperti pada nomor urut 8.
I.8.4. Geo-referencing
Geo-referencing adalah transformasi data scanner (point clouds) dalam sistem
koordinat lokal ke sistem koordinat tanah yang mana sangat penting dalam integrasi dengan data geospasial lainnya (Reshetyuk, 2009). Tahapan geo-referencing pada data point clouds adalah kegiatan transformasi koordinat dari sistem koordinat
scanner ke sistem koordinat tanah. Apabila dikelompokkan maka terdapat tiga jenis geo-referencing, yakni indirect geo-referencing, direct geo-referencing dan metode data-driven (Schuhmacher dan Böhm dalam Paffenholz, 2012). Indirect
geo-referencing adalah proses geo-geo-referencing pada data TLS yang umumnya
menggunakan metode statik. Pada metode ini membutuhkan beberapa parameter transformasi, yakni 3 buah translasi (X, Y, Z) dan 3 buah rotasi (, φ, ). Direct
geo-referencing adalah metode geo-referencing yang secara otomatis telah
terintegrasi pada saat akuisisi data point clouds. Hal tersebut dapat terjadi sebab yang digunakan telah menggunakan sensor eksternal seperti sensor positioning 3D, inklinometer, gyroscopes dan kompas. Indirect geo-referencing dipilih sebagai metode referencing pada penelitian ini. Terdapat dua jenis indirect
geo-referencing, yakni one-step approach dan two-step approach. Diantara dua buah
jenis indirect geo-referencing tersebut, jenis two-step approach yang digunakan dalam proses geo-referencing dalam penelitian ini.
Two-step approach pada proses indirect referencing memiliki proses geo-referencing yang melalui dua buah langkah utama. Langkah pertama pada metode ini
yakni, scan world hasil akuisisi data mengalami proses global registration. Global
registration merupakan proses registrasi beberapa scan world yang memiliki sistem
koordinat berbeda ke dalam satu sistem koordinat yang sama. Sistem koordinat yang digunakan masing dalam sistem koordinat lokal dari scanner. Langkah kedua yakni, transformasi koordinat hasil global registration ke sistem koordinat eksternal/tanah dengan memanfaatkan titik ikat. Berdasarkan dua langkah tersebut maka scan world akan memiliki sistem koordinat eksternal/tanah. Kelebihan dari metode two-step
approach yakni pada penggunaan titik ikat yang lebih minim. Jumlah titik ikat yang
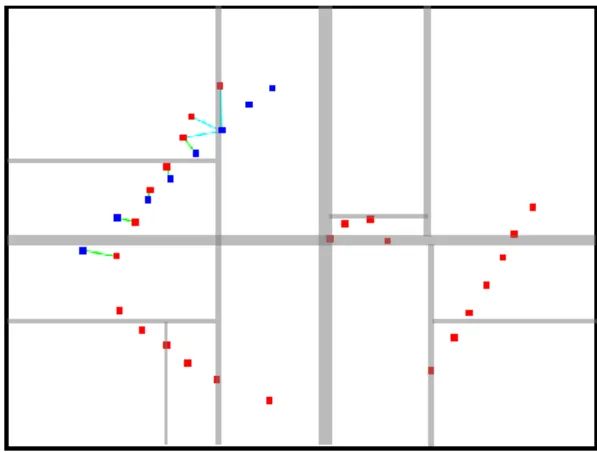
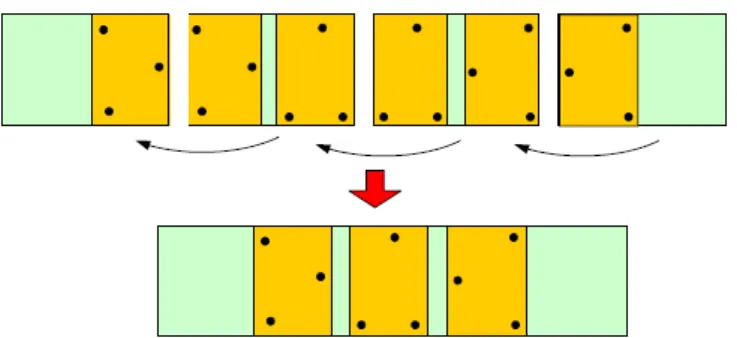
minim sehingga tidak diperlukan survei ekstra untuk pengadaan titik ikat. Pada Gambar I.16 adalah ilustrasi langkah pertama, yakni global registration.
Pada Gambar I.16 terlihat bahwa scan world yang awalnya belum mengalami global
registration masih terpisah-pisah. Setelah melalui tahapan global registration maka
beberapa scan world tersebut yang sebelumnya terpisah menjadi menyatu sempurna. Oleh sebab itu, tahapan langkah kedua dapat dilakukan. Tahapan kedua dapat dilihat pada ilustrasi Gambar I.17.
Gambar I.17 Langkah kedua dalam metode two-step approach (Reshetyuk, 2009). Pada Gambar I.17 terdapat tiga buah titik kontrol, ketiga titik tersebut dimanfaatkan sebagai titik acuan dalam proses georerefensi. Hasil global registration yang masih memiliki sistem koordinat lokal akan mengalami transformasi ke sistem koordinat eksternal/tanah dengan menggunakan acuan titik kontrol tersebut. Mengingat bahwa proses geo-referencing adalah proses transformasi koordinat dari sistem koordinat
scanner ke sistem koordinat eksternal. Maka pada Gambar I.18 merupakan ilustrasi
dari komponen-komponen dalam georeferensi.
Gambar I.18 Ilustrasi geo-referencing sistem koordinat TLS (Paffenholz, 2012) Keterangan :
L-frame : Sistem koordinat scanner (lokal). G-frame : Sistem koordinat eksternal
p : Titik obyek pada sistem koordinat scanner.
: Jarak titik P terhadap pusat sistem koordinat scanner.
: Sudut horizontal titik P terhadap sistem koordinat scanner.
: Sudut vertikal titik P terhadap sisitem koordinat scanner.
z || Z : Sumbu z sistem koordinat scanner sejajar dengan sumbu Z pada sistem koordinat eksternal.
tLG : Translasi dari sistem kordinat scanner ke sistem koordinat eksternal. p jL : vektor titik P terhadap pusat sistem koordinat scanner (L-frame)
sebelum geo-referencing.
p jG : vektor titik P terhadap pusat sistem koordinat eksternal (G-frame) sebelum geo-referencing.
p iG : Posisi titik P terhadap pusat sistem koordinat eksternal setelah
geo-referencing.
ω ; φ ; κ : Nilai rotasi sumbu X, sumbu Y dan sumbu Z.
Penelitian ini menggunakan metode indirect geo-referencing dengan two-step
approach. Oleh sebab itu diperlukan registration global registration dalam proses
pengolahannya. Pada proses georeferensi membutuhkan 6 buah parameter transformasi. Parameter tersebut adalah tiga buah translasi (X, Y, Z) dan tiga buah rotasi (, φ, ). Dalam bentuk matematis, Reshetyuk menuliskan bahwa translasi dan rotasi dapat dinotasikan. Pertama-tama, untuk Translasi dapat dinotasikan seperti dalam persamaan I.5 sebagai berikut :
∆𝑋𝑖 = [∆𝑋 ∆𝑌 ∆𝑍]𝑇... I.5 Keterangan :
X : Matriks translasi.
X : Selisih nilai X pada sistem koordinat scanner dengan sistem koordinat eksternal.
Y : Selisih nilai Y pada sistem koordinat scanner dengan sistem koordinat eksternal.
Z : Selisih nilai Z pada sistem koordinat scanner dengan sistem koordinat eksternal.
Rotasi dapat dinotasikan dalam persamaan I.6 sebagai berikut : 𝑅𝑖 = 𝑅3(). 𝑅2(𝜑). 𝑅1(𝜔)...I.6 Dimana komponen R1, R2, R3 adalah :
𝑅1(𝜔) = [ 1 0 0 0 cos 𝜔 sin 𝜔 0 − sin 𝜔 cos 𝜔 ] 𝑅2(𝜑) = [ cos 𝜑 0 − sin 𝜑 0 1 0 sin 𝜑 0 cos 𝜑 ] 𝑅3() = [ cos sin 0 − sin cos 0 0 0 1 ]
Sehingga diperoleh rumus geo-referencing adalah sebagai berikut : 𝑋𝑒 = ∆𝑋𝑖+ 𝑅𝑖...I.7
Keterangan :
Xe : Persamaan geo-referencing ke sistem koordinat eksternal.
Xi : Matriks translasi sistem koordinat scanner ke sistem koordinat eksternal. Ri : Matriks rotasi sistem koordinat scanner ke sistem koordinat eksternal.
I.8.5. Kontrol kualitas
Kontrol kualitas merupakan salah satu proses yang digunakan untuk mengetahui kehandalan data. Kehandalan yang diperoleh dapat digunakan sebagai rujukan dalam melakukan kegiatan ilmiah ataupun kegiatan aplikatif lainnya. Proses registrasi target based dan cloud to cloud akan memberikan perbedaan yang disebabkan metode yang berbeda. Oleh karena itu diperlukan proses kontrol kualitas, adapun bentuk kontrol kualitas yang dilakukan adalah sebagai berikut :
I.8.5.1. Perbandingan RMS registrasi. Perbandingan kualitas data registrasi dapat dilakukan dengan melihat nilai RMS (Root Mean Square) yang diperoleh dari proses registrasi data point clouds. RMS dapat diperoleh dari masing-masing metode, baik metode registrasi target to target maupun cloud to cloud.
Software faro scene digunakan sebagai software untuk proses registrasi.
Berdasarkan hal tersebut maka standar RMS yang digunakan mengikuti standar dari
software tersebut. Faro scene memiliki indikator untuk menentukan apakah hasil
scene indikator tersebut ditampilkan dalam bentuk indikator warna dengan batas :
lampu hijau < 10mm ; kuning 10 mm dan 20 mm ; dan merah > 20 mm.
I.8.5.2. Perbandingan model space. Perbandingan model space akan memperlihatkan dua buah bentuk point clouds hasil registrasi metode target to target dan cloud to cloud. Berdasarkan dua model 3D tersebut akan dilihat perbedaan apa saja yang terjadi dan kelebihan maupun kekurangan masing-masing metode dalam sudut pandang visual. Perbandingan model space tersebut memanfaatkan perangkat lunak Cyclone sebagai media visualisasi.
I.8.5.3. Uji statistik. Uji statistik merupakan salah satu dari proses kontrol kualitas yang digunakan dalam penelitian ini. Proses uji kualitas ini dengan menggunakan perbandingan jarak. Jarak antar obyek pada masing-masing hasil registrasi akan dibandingkan untuk melihat seberapa besar perbedaan jarak spasial yang ada dalam dua hasil registasi tersebut. Jarak diukur secara on-screen memanfaatkan fitur mode measurement between two points pada software Cyclone 6.0.3. Pengambilan sampel jarak sebanyak 30 buah. Berdasarkan hasil pengambilan sampel jarak dari dua buah hasil registrasi tersebut maka dapat dilakukan analisis uji statistik. Analisis uji statistik bertujuan untuk mengetahui apakah hasil pengukuran jarak tersebut masuk dalam rentang kepercayaan. Rentang kepercayaan yang diberikan pada hasil registrasi tersebut adalah sebesar 95%. Uji statistik menggunakan uji distribusi t student. Berdasarkan literatur yang digunakan maka berikut ini adalah rumus rentang batas menggunakan t-distribution pada persamaan I.8 (Widjajanti, 2011). 𝑋 − 𝑡𝑑𝑓𝛼 2 . 𝜎 √𝑛 < 𝜃 < 𝑋 + 𝑡𝑑𝑓𝛼2 . 𝜎 √𝑛… … … . (I. 8) Keterangan : σ = Simpangan baku
𝑋̅ = Nilai ukuran yang dianggap benar (target to target) tdf = Derajat kebebasan
α = Level signifikan yang digunakan θ = Nilai hasil ukuran
Data sampel diperoleh dari dua buah hasil registrasi, yakni registrasi target to
target dan cloud to cloud. Hasil registrasi target to target diasumsikan sebagai nilai
yang benar dikarenakan proses registrasi target to target minimum campur tangan
user secara manual. Oleh karena itu hasil registrasi cloud to cloud diuji terhadap
hasil target to target.
I.8.5.4. Uji posisi. Kepentingan mengetahui presisi titik dan tidaknya dapat dilakukan dengan uji posisi. Uji posisi dapat dilakukan dengan mengambil sampel dari beberapa posisi (semisal : pojok bangunan). Uji posisi koordinat ini bertujuan untuk mengetahui nilai RMS dari masing-masing komponen koordinat dan nilai RMS total. Sampel yang digunakan dalam proses uji posisi sebanyak 30 buah dengan lokasi yang tersebar. Berdasarkan sampel tersebut maka nilai RMS masing-masing komponen koordinat dapat dihitung dengan menggunakan persamaan I.9 (Widjajanti, 2011).
𝑅𝑀𝑆 = √Σ(𝑥𝑖− 𝑥̅) 2
𝑛 … … … . (I. 9) Keterangan :
RMS : Root mean square
xi : Nilai ke-i 𝑥̅ : Rata-rata nilai x n : Jumlah data
I.9. Hipotesis
1. Hasil registrasi metode target to target dan cloud to cloud pada obyek berdimensi besar tidak berbeda signifikan dalam hal geometri obyek.
2. Metode registrasi target to target lebih efektif dan efisien dibandingkan cloud