TUGAS AKHIR – TE 141599
DESAIN
MAXIMUM POWER POINT T RACKING
UNTUK TURBIN ANGIN MENGGUNAKAN
MODIFIED
PERT URB
&
OBSERV E
(P&O) BERDASARKAN
PREDIKSI KECEPATAN ANGIN
Dwiyan Anugrah Ernadi NRP 2212100123
Dosen Pembimbing
Dr. Ir. Margo Puj iantara, MT.
Prof. Dr. Ir. Mauridhi Hery Purnomo, M. Eng.
JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Indust ri
FINAL PROJECT – TE 141599
DESIGN MAXIMUM POWER POINT TRACKING FOR
WIND TURBINE USING MODIFIED PERTURB &
OBSERVE (P&O) BASED ON WIND VELOCITY
PREDICTION
Dwiyan Anugrah Ernadi NRP 2212100123
Advisor
Dr. Ir. Margo Puj iantara, MT.
Prof. Dr. Ir. Mauridhi Hery Purnomo, M. Eng.
DEPARTMENT OF ELECTRICAL ENGINEERING Faculty of Indust rial Technology
i
Desain
Maximum Power Point Tracking
Untuk Turbin Angin
Menggunakan
Modified Perturb
&
Observe
(P&O)
Berdasarkan Prediksi Kecepatan Angin
Nama Mahasiswa : Dwiyan Anugrah Ernadi Pembimbing I : Dr. Ir. Margo Pujiantara, MT.
Pembimbing II : Prof. Dr. Ir. Mauridhi Hery Purnomo, M.Eng.
Abstrak:
Perkembangan teknologi energi baru dan terbarukan menjadi persoalan yang mendunia saat ini. Berbagai cara seperti kecerdasan buatan, algoritma peramalan dan optimasi kontrol dilakukan untuk mendapatkan hasil yang stabil dan dapat diaplikasikan pada masa yang akan datang. Pada buku tugas akhir ini akan dibahas mengenai implementasi Maximum Power Point Tracking (MPPT) pada sistem turbin angin skala kecil yang dikontrol menggunakan metode Modified Perturb & Observe (P&O) pada kontrol konverter buck berdasarkan nilai arus dan tegangan yang dihasilkan pada keluaran Permanent Magnet Synchronous Generator (PMSG). P&O merupakan metode yang paling banyak digunakan pada MPPT. Dengan modifikasi pada hal mendasar dari algoritma P&O, MPPT dapat menghasilkan daya optimal dan kecepatan yang lebih baik dalam pencarian nilai daya maksimum. Modifikasi pada metode P&O dapat dilakukan dengan cara menambahkan strategi kontrol dalam perubahan besarnya step dari duty cyle (∆D). Seiring dengan perubahan besarnya tegangan dan arus masukan pada MPPT, keluaran daya yang dihasilkan juga akan berubah-ubah. Perubahan daya tersebut akan memengaruhi perubahan ∆D. Dengan modifikasi metode P&O pada MPPT ini, osilasi daya keluaran pada turbin angin dapat diredam dengan baik. Hasil akhir dari penelitian ini adalah turbin angin skala kecil menggunakan sistem MPPT berdasarkan metode Modified P&O dapat menghasilkan daya maksimum yang optimal dengan kecapatan tracking yang cepat. Efesiensi daya yang dihasilkan mencapai 97.3% dan waktu yang dibutuhkan kurang dari 20.3 detik.
Kata kunci: Energi Baru dan Terbarukan, Turbin Angin, PMSG, MPPT,
ii
iii
Design Maximum Power Point Tracking For Wind Turbine
Using Modified Perturb & Observe (P&O) Based On Wind
Velocity Prediction
Student Name : Dwiyan Anugrah Ernadi Advisor I : Dr. Ir. Margo Pujiantara, MT.
Advisor II : Prof. Dr. Ir. Mauridhi Hery Purnomo, M.Eng.
Abstract:
Development in new and renewable energy becomes the common global issue. Various artificial intelligence, forecasting and optimization algorithm controls performed to obtain stable results and can be applied in the future. In this final project will be discussed the implementation of Maximum Power Point Tracking (MPPT) on small-scale wind turbine system controlled using the Modified Perturb & Observe (P&O) on the control of buck converter based on the value of current and voltage generated at the output of Permanent Magnet Synchronous Generator (PMSG). P&O is the mostly used method in the MPPT. Modification in the basic points of the algorithm P&O, MPPT can produce optimal power and fast tracking maximum power. Modified P&O method can be done by adding a control strategy in a step change of duty cycle (ΔD). Along with changes in the magnitude of the voltage and current inputs on MPPT, the power generated output will also change. The changing of power will affect the value of ΔD. Modified P&O algorithm in MPPT could reduce the oscillation at output power of wind turbine. The result of this study shows that Modified P&O that implemented in small-scale wind turbine system can generate optimum power with fast tracking in maximum power. Power efficiency reach 97.3% and need less than 20.3 seconds to reach maximum power point.
Keywords: New and Renewable Energy, Wind Turbine, PMSG, MPPT,
iv
dikosongkan---v
KATA PENGANTAR
Alhamdulillahirabbil ‘alamin. Puji syukur saya panjatkan kepada Allah SWT yang telah memberikan kekuatan dan pertolongan ilmu serta kesehatan sehingga tugas akhir ini dapat selesai dengan hasil yang baik dan tepat pada waktunya. Tugas akhir dengan judul:
Desain Maximum Power Point Tracking Untuk Turbin Angin Menggunakan Modified Perturb & Observe (P&O) Berdasarkan
Prediksi Kecepatan Angin
ini ditulis untuk memenuhi persyaratan mendapatkan gelar Sarjana Teknik setelah 4 tahun menerima pendidikan di Jurusan Teknik Elektro, Institut Teknologi Sepuluh Nopember, Surabaya. Penyelesaian tugas akhir ini merupakan serangkaian pengalaman berharga, yang mengajarkan banyak arti kesabaran, kegigihan, dan kerja keras.
Kritik, saran serta perbaikan terhadap tugas akhir ini sangat diharapkan. Semoga tugas akhir ini bermanfaat, baik bagi perkembangan energi baru dan terbarukan pada khususnya maupun ilmu pengetahuan pada umumnya.
Surabaya, Juni 2016
vi
dikosongkan---vii
UCAPAN TERIMA KASIH
Tugas akhir ini juga merupakan persembahan dan ucapan terima kasih yang mendalam kepada:
1. Kedua orang tua, Sriyanto, SE. MM. dan Erna Lies WSP, kedua sosok yang doanya selalu terdengar sehingga tugas akhir ini dapat dikerjakan dengan lancar.
2. Dosen Pembimbinng I, Bapak Dr. Ir. Margo Pujiantara, MT., atas bimbingan, ilmu pengetahuan, arahan, kesabaran, dan pengalaman yang diberikan.
3. Dosen Pembimbing II, Bapak Prof. Dr. Ir. Mauridhi Hery Purnomo, M.Eng., yang menunjukkan bagaimana pentingnya pemahaman konsep ilmu pengetahuan, filosofi dari sistem. 4. Bapak Dr. Eng. Ardyono Priyadi, ST. M.Eng., Ketua Jurusan
Teknik Elektro ITS, dan seluruh keluarga besar Jurusan Teknik Elektro ITS atas segala fasilitas dan kemudahan yang telah diberikan.
5. Bapak dan Ibu dosen Jurusan Teknik Elektro ITS yang telah membina dan memberikan ilmu kepada peulis selama menempuh studi di Jurusan Teknik Elektro ITS.
6. Ibu Ratna Ika Putri selaku mentor, yang selalu memantau perkembangan peneletian dan memberikan arahan serta penjelasan mengenai topik tugas akhir ini.
7. Mas Irwan, Sefri, Mas Multazam, dan Mba Efin sebagai kelompok diskusi turbin angin.
8. Dietha Kusumaningrum dan Dina Rahmayanti, kakak dan adik tercinta yang selalu memberikan semangat dalam tugas akhir ini. 9. Dhea Nazmi Rifa, atas kesabaran yang diberikan selama ini serta mendukung dan menyemangati dalam menyelesaikan tugas akhir ini.
10. Teman-teman hai!!!! yang selalu memberikan semangat dan hiburan.
viii
12. Keluarga besar Laboratorium Instrumentasi, Pengukuran, dan Identifikasi Sistem Tenaga (LIPIST) yang selalu memberikan dukungan dan pencerahan selama pengerjaan tugas akhir. 13. Teman-teman angkatan ke-52 Jurusan Teknik Elektro ITS,
mahasiswa Jurusan Teknik Elektro ITS angkatan 2012, yang membuat penulis semangat untuk wisuda bersama.
14. Semua pihak yang membantu dan tidak dapat saya sebutkan satu per satu.
ix
DAFTAR ISI
ABSTRAK ... i
ABSTRACT ... iii
KATA PENGANTAR ... v
UCAPAN TERIMA KASIH ... vii
DAFTAR ISI ... ix
DAFTAR GAMBAR ... xi
DAFTAR TABEL ... xv
BAB 1 PENDAHULUAN ... 1
1.1 Latar Belakang Masalah ... 1
1.2 Permasalahan ... 2
1.3 Tujuan ... 3
1.4 Metodologi ... 3
1.5 Sistematika Penulisan ... 6
1.6 Relevansi ... 6
BAB 2 TEORI PENUNJANG ... 9
2.1 Energi Angin ... 9
2.1.1 Pemanasan Matahari yang Tidak Merata ... 10
2.1.2 Gaya Coriolis ... 10
2.1.3 Kondisi Geografis ... 11
2.2 Turbin Angin... 11
2.2.1 Tipe Turbin Angin... 11
2.2.1.1 Turbin Angin Horisontal... 12
2.2.1.2 Turbin Angin Vertikal ... 14
2.2.2 Karakteristik Turbin Angin ... 15
2.3 Parameter Turbin Angin ... 18
2.4 Permanent Magnet Synchronous Generator ... 21
2.5 Konverter ... 23
2.5.1 Rectifier ... 23
2.5.2 Konverter Buck ... 25
2.6 Mikrokontroller ... 30
2.6.1 Arduino ... 31
x
2.7.1 Perturb and Observe ... 33
2.7.2 Modified Perturb and Observe ... 35
BAB 3 PERANCANGAN PENELITIAN ... 39
3.1 Desain Sistem ... 39
3.2 Pengambilan Data PMSG ... 40
3.3 Perancangan Sensor ... 42
3.3.1 Sensor Tegangan ... 42
3.3.2 Sensor Arus ... 44
3.4 Rectifier ... 44
3.5 Arduino MEGA 2560 ... 44
3.6 Optocoupler dan PWM Driver ... 46
3.7 Perancangan Konverter Buck ... 46
3.8 Perturb and Observe ... 48
3.9 Modified Perturb and Observe ... 48
BAB 4 ANALISIS PENELITIAN ... 49
4.1 Pengujian Sensor ... 49
4.1.1 Sensor Tegangan ... 49
4.1.2 Sensor Arus ... 50
4.2 Pengujian Sistem Turbin Angin ... 50
4.3 Pengujian Nilai Daya Maksimum ... 51
4.3.1 Pengujian Nilai Daya Maksimum Tanpa MPPT ... 51
4.3.2 Pengujian Nilai Daya Maksimum Dengan MPPT ... 58
4.3.2.1 Perturb and Observe ... 58
4.3.2.2 Modified Perturb and Observe ... 70
4.4 Analisis Hasil Pengujian ... 82
BAB 5 PENUTUP ... 85
5.1 Kesimpulan ... 85
5.2 Penelitian Selanjutnya ... 86
DAFTAR PUSTAKA ... 87
xi
DAFTAR GAMBAR
Gambar 2.1 Turbin angin horisontal ... 12
Gambar 2.2 Turbin angin vertikal ... 14
Gambar 2.3 Kurva daya ideal pada turbin angin ... 16
Gambar 2.4 Kurva Cp vs Tip Speed Ratio ... 17
Gambar 2.5 Turbin Angin TDS-500 ... 19
Gambar 2.6 Turbin angin TDS-500 yang terpasang di Ciheras, Tasikmalaya ... 20
Gambar 2.7 Rangkaian penyearah 3 fasa full-bridge ... 23
Gambar 2.8 (a) Gelombang tegangan, (b) Respon saklar ... 24
Gambar 2.9 Rangkaian konverter buck ... 25
Gambar 2.10 Rangkaian konverter buck saat kondisi saklar on (closed) ... 26
Gambar 2.11 (a) Respon tegangan induktor saat saklar on (b) Respon arus induktor saat saklar on ... 27
Gambar 2.12 Rangkaian konverter buck saat kondisi saklar off (open) ... 27
Gambar 2.13 (a) Respon tegangan induktor saat saklar off (b) Respon arus induktor saat saklar off ... 28
Gambar 2.14 Arus kapasitor ... 30
Gambar 2.15 Blok diagram mikrokontroller ATmega ... 31
Gambar 2.16 Flowchart metode perturb and observe ... 34
Gambar 2.17 Metode perturb and observe dengan large step size ... 35
Gambar 2.18 Metode perturb and observe dengan small step size ... 35
Gambar 2.19 Flowchart metode modified perturb and observe ... 36
Gambar 3.1 Diagram sistem turbin angin dengan MPPT ... 39
Gambar 3.2 Perangkat sistem turbin angin ... 40
Gambar 3.3 Permanent magnet synchronous generator dengan motor induksi ... 41
Gambar 3.4 Sensor arus dan sensor tegangan ... 42
Gambar 3.5 Rangkaian sensor tegangan ... 43
Gambar 3.6 Board Arduino MEGA 2560... 45
Gambar 3.7 Desain rangkaian konverter buck ... 47
xii
Gambar 4.2 Perbandingan daya keluaran konverter pada kecepatan
angin 6 m/s hingga 8 m/s ... 58
Gambar 4.3 Daya keluaran pada saat kecepatan angin 3 m/s, time delay
0.5 detik, metode P&O ... 59
Gambar 4.4 Daya keluaran pada saat kecepatan angin 3 m/s, time delay
0.7 detik, metode P&O ... 59
Gambar 4.5 Daya keluaran pada saat kecepatan angin 3 m/s, time delay
1 detik, metode P&O ... 60
Gambar 4.6 Daya keluaran pada saat kecepatan angin 4 m/s, time delay
0.5 detik, metode P&O ... 61
Gambar 4.7 Daya keluaran pada saat kecepatan angin 4 m/s, time delay
0.7 detik, metode P&O ... 61
Gambar 4.8 Daya keluaran pada saat kecepatan angin 4 m/s, time delay
1 detik, metode P&O ... 62
Gambar 4.9 Daya keluaran pada saat kecepatan angin 5 m/s, time delay
0.5 detik, metode P&O ... 63
Gambar 4.10 Daya keluaran pada saat kecepatan angin 5 m/s, time delay
0.7 detik, metode P&O ... 63
Gambar 4.11 Daya keluaran pada saat kecepatan angin 5 m/s, time delay
1 detik, metode P&O ... 64
Gambar 4.12 Daya keluaran pada saat kecepatan angin 6 m/s, time delay
0.5 detik, metode P&O ... 65
Gambar 4.13 Daya keluaran pada saat kecepatan angin 6 m/s, time delay
0.7 detik, metode P&O ... 65
Gambar 4.14 Daya keluaran pada saat kecepatan angin 6 m/s, time delay
1 detik, metode P&O ... 66
Gambar 4.15 Daya keluaran pada saat kecepatan angin 7 m/s, time delay
0.5 detik, metode P&O ... 67
Gambar 4.16 Daya keluaran pada saat kecepatan angin 7 m/s, time delay
0.7 detik, metode P&O ... 67
Gambar 4.17 Daya keluaran pada saat kecepatan angin 7 m/s, time delay
1 detik, metode P&O ... 68
Gambar 4.18 Daya keluaran pada saat kecepatan angin 8 m/s, time delay
0.5 detik, metode P&O ... 69
Gambar 4.19 Daya keluaran pada saat kecepatan angin 8 m/s, time delay
xiii
Gambar 4.20 Daya keluaran pada saat kecepatan angin 8 m/s, time delay
1 detik, metode P&O ... 70
Gambar 4.21 Daya keluaran pada saat kecepatan angin 3 m/s, time delay
0.5 detik, metode modified P&O ... 71
Gambar 4.22 Daya keluaran pada saat kecepatan angin 3 m/s, time delay
0.7 detik, metode modified P&O ... 71
Gambar 4.23 Daya keluaran pada saat kecepatan angin 3 m/s, time delay
1 detik, metode modified P&O ... 72
Gambar 4.24 Daya keluaran pada saat kecepatan angin 4 m/s, time delay
0.5 detik, metode modified P&O ... 73
Gambar 4.25 Daya keluaran pada saat kecepatan angin 4 m/s, time delay
0.7 detik, metode modified P&O ... 73
Gambar 4.26 Daya keluaran pada saat kecepatan angin 4 m/s, time delay
1 detik, metode modified P&O ... 74
Gambar 4.27 Daya keluaran pada saat kecepatan angin 5 m/s, time delay
0.5 detik, metode modified P&O ... 75
Gambar 4.28 Daya keluaran pada saat kecepatan angin 5 m/s, time delay
0.7 detik, metode modified P&O ... 75
Gambar 4.29 Daya keluaran pada saat kecepatan angin 5 m/s, time delay
1 detik, metode modified P&O ... 76
Gambar 4.30 Daya keluaran pada saat kecepatan angin 6 m/s, time delay
0.5 detik, metode modified P&O ... 77
Gambar 4.31 Daya keluaran pada saat kecepatan angin 6 m/s, time delay
0.7 detik, metode modified P&O ... 77
Gambar 4.32 Daya keluaran pada saat kecepatan angin 6 m/s, time delay
1 detik, metode modified P&O ... 78
Gambar 4.33 Daya keluaran pada saat kecepatan angin 7 m/s, time delay
0.5 detik, metode modified P&O ... 79
Gambar 4.34 Daya keluaran pada saat kecepatan angin 7 m/s, time delay
0.7 detik, metode modified P&O ... 79
Gambar 4.35 Daya keluaran pada saat kecepatan angin 7 m/s, time delay
1 detik, metode modified P&O ... 80
Gambar 4.36 Daya keluaran pada saat kecepatan angin 8 m/s, time delay
0.5 detik, metode modified P&O ... 81
Gambar 4.37 Daya keluaran pada saat kecepatan angin 8 m/s, time delay
xiv
Gambar 4.38 Daya keluaran pada saat kecepatan angin 8 m/s, time delay
xv
DAFTAR TABEL
Tabel 2.1 Data turbin angin ... 18
Tabel 2.2 Hasil data perhitungan turbin angin ... 20
Tabel 2.3 Spesifikasi Arduino MEGA 2560 ... 32
Tabel 3.1 Hasil data uji PMSG ... 41
Tabel 3.2 Parameter Arduino MEGA 2560 ... 45
Tabel 3.3 Spesifikasi konverter buck... 47
Tabel 3.4 Parameter algoritma perturb and observe ... 48
Tabel 3.5 Parameter algoritma modified perturb and observe... 48
Tabel 4.1 Data hasil uji sensor tegangan ... 49
Tabel 4.2 Data hasil uji sensor arus ... 50
Tabel 4.3 Daya PMSG ... 50
Tabel 4.4 Hasil daya maksimum pada kecepatan 3 m/s ... 51
Tabel 4.5 Hasil daya maksimum pada kecepatan 4 m/s ... 52
Tabel 4.6 Hasil daya maksimum pada kecepatan 5 m/s ... 53
Tabel 4.7 Hasil daya maksimum pada kecepatan 6 m/s ... 55
Tabel 4.8 Hasil daya maksimum pada kecepatan 7 m/s ... 55
Tabel 4.9 Hasil daya maksimum pada kecepatan 8 m/s ... 56
Tabel 4.10 Perbandingan hasil daya pengujian ... 83
Tabel 4.11 Perbandingan hasil waktu pengujian ... 83
xvi
1
BAB 1
PENDAHULUAN
1.1 Latar Belakang Masalah
Energi listrik dibutuhkan dalam kehidupan sehari-hari untuk membantu tugas dan aktivitas manusia. Pemenuhan kebutuhan listrik dapat dilakukan dengan membangun pembangkit tenaga listrik. Pembangkitan tenaga listrik dapat dilakukan dengan berbagai macam cara. Berdasarkan bahan primernya, pembangkit tenaga listrik terbagi menjadi dua, yaitu energi terbarukan dan energi tak terbarukan. Energi terbarukan adalah energi yang sumber bahan primernya dapat diambil secara mudah, diperbarui, dan digunakan kembali. Salah satu contoh dari energi terbarukan adalah energi angin [1].
Berdasarkan data Blueprint Energi Nasional, Departemen ESDM RI, dapat dilihat bahwa potensi Pembangkit Listrik Tenaga Angin di Indonesia sangat menarik untuk dikembangkan karena dari potensi sebesar 9.29 GW, baru sekitar 0.5 GW yang dikembangkan, yang berarti baru sekitar 5.38% [2]. Beberapa daerah di Indonesia yang memiliki potensi pengembangan Pembangkit Listrik Tenaga Angin antara lain NTB, NTT, Maluku, dan wilayah-wilayah Indonesia bagian timur.
Energi angin dapat menghasilkan energi listrik dengan menggunakan turbin angin. Turbin angin memiliki berbagai macam jenis berdasarkan dari bentuk dan poros yang digunakan. Turbin angin terhubung dengan generator yang dapat mengubah energi gerak dari turbin angin menjadi energi listrik. Generator yang umum digunakan pada pembangkitan energi listrik berbasis turbin angin adalah Permanent Magnet Synchronous Generator (PMSG).
2
sehingga lebih efisien dan memiliki harga yang paling rendah diantara metode-metode yang ada [4]. Metode ini memiliki feedback yang sederhana dan beberapa parameter pengukuran. Kekurangan metode ini menghasilkan osilasi pada kondisi steady state karena perubahan duty cycle konstan.
Modifikasi dengan mengombinasikan metode P&O dengan metode prediktif. Kedua metode tersebut bekerja secara bergantian sesuai dengan kondisi dari arus dan tegangan pada sisi masukan konverter [4]. Metode prediktif digunakan untuk menentukan besarnya perubahan step pada metode P&O. Apabila perubahan dari tegangan sangat besar, maka akan digunakan step size yang bernilai besar, sedangkan apabila perubahan dari nilai tegangan kecil digunakan step size yang kecil.
Besaran torsi dapat memberikan pengaruh terhadap daya keluaran generator. Dengan mengatur torsi tersebut dalam nilai yang optimal, maka akan dihasilkan daya keluaran yang maksimal dengan menggunakan MPPT [5]. Pada metode ini diperlukan sensor mekanik berupa anemometer yang digunakan untuk mengetahui besaran torsi pada tiap kecepatan angin.
Dengan modifikasi pada hal mendasar dari algoritma P&O, MPPT dapat menghasilkan akurasi yang lebih baik dalam pencarian nilai daya maksimum. Modifikasi pada metode P&O dapat dilakukan dengan cara menambahkan strategi kontrol dalam perubahan besarnya size-step dari duty cycle (∆D). Pada tugas akhir ini algoritma modified perturb & observe akan diimplementasikan pada sistem turbin angin stand alone dengan menggunakan mikrokontroller.
1.2 Permasalahan
Sistem turbin angin stand alone tanpa menggunakan MPPT akan memiliki efesiensi yang sangat rendah. Daya yang dihasilkan oleh generator hanya akan digunakan sebagian apabila tidak menggunakan MPPT. Implementasi kontrol MPPT dibutuhkan untuk menanggulangi masalah tersebut.
3
adalah ketika terjadi perubahan kecepatan angin. Ketika terjadi perubahan kecepatan angin, maka akan muncul titik daya keluaran maksimum yang baru.
Penggunaan Modified P&O pada turbin angin dapat memberikan solusi terhadap penggunaan metode MPPT. Dari beberapa hasil penelitian didapatkan masih terjadi osilasi ketika metode P&O digunakan pada turbin angin. Modifikasi pada beberapa algoritma P&O diharapkan dapat meredam osilasi tersebut.
Dalam menyelesaikan permasalahan pada tugas akhir ini, terdapat beberapa batasan penelitian. Kecepatan angin dimodelkan menggunakan emulator yang berupa motor induksi dan dikontrol dengan variable speed drive. Penelitian ini hanya untuk MPPT dengan pencarian nilai daya maksimum untuk satu kecepatan tertentu (tidak variatif). Konverter yang digunakan hanya menggunakan konverter buck dengan beban resistif berupa lampu. Efesiensi dari konverter buck tidak diperhitungkan.
1.3 Tujuan
Tujuan yang ingin dicapai dari tugas akhir ini adalah:
1. Mengimplementasikan Modified Perturb & Observe untuk mengekstrak daya maksimum pada sistem turbin angin menggunakan PMSG
2. Membandingkan hasil keluaran yang diperoleh pada turbin angin dengan metode konvensional P&O dan Modified P&O. 3. Mengetahui performansi dari Modified P&O dengan perubahan
kecepatan angin yang bervariasi pada pembangkitan tenaga listrik dengan menggunakan turbin angin berbasis PMSG.
1.4 Metodologi
Metode penelitian yang digunakan dalam tugas akhir ini terdiri dari Studi Literatur, Pengumpulan Data, Desain MPPT, Simulasi, Implementasi dan Analisis.
1. Studi Literatur
4
laporan teknik, dan buku teks yang berhubungan dengan permasalahan yang akan diteliti. Pustaka yang berkaitan dengan turbin angin, maximum power point tracking, metode perturb & observe, permanent magnet synchronous generator, dan elektronika daya.
2. Pengumpulan Data
Pada penelitian yang akan dilakukan mengambil data dari kecepatan angin yang berada di Nganjuk dan turbin angin yang sudah terpasang di Ciheras. Data yang akan diambil berupa data kecepatan angin, besarnya nilai tegangan dan arus pada permanent magnet synchronous generator turbin angin. Besarnya nilai tegangan dan arus yang didapatkan adalah nilai tegangan dan arus pada keluaran dari permanent magnet synchronous generator.
3. Desain Sistem
Desain MPPT dilakukan dengan metode Modified Perturb and Observe (P&O). Metode Modified Perturb and Observe (P&O) merupakan modifikasi hal sederhana dari metode P&O. Desain kontrol MPPT dengan metode Modified Perturb and Observe (P&O) ini mengatur kontrol dari switch pada DC-DC Konverter. Perbandingan hasil daya dan tegangan akan menjadi acuan untuk perubahan pada kontrol switch. Nilai daya pada saat sekarang akan dibandingkan dengan nilai sebelumnya. Begitu pula dengan nilai tegangan. Modified pada Perturb and Observe (P&O) adalah dengan menentukan nilai step-size (∆D) yang
5
Perturb and Observe (P&O) konvensional dengan Modified Perturb and Observe (P&O).
5. Implementasi
Implementasi MPPT dilakukan untuk untuk membuat hardware dari sistem turbin angin. Dalam tugas akhir ini pembuatan hardware dilakukan dengan cara membuat algoritma kontrol menggunakan mikrokontroler. Mikrokontroler yang digunakan adalah Arduino. Hardware lain yang digunakan berupa emulator turbin angin, PMSG, rectifier, dan konverter buck menggunakan modul lab yang sudah tersedia.
6. Pengujian dan Analisis
Pengujian dilakukan pada setiap hardware yang digunakan. Dalam pengujian hardware yang digunakan, dihitung besaran kesalahan pengukurannya. Terdapat tiga metode yang digunakan dalam menguji sistem turbin angin. Pengujian pertama dilakukan dengan cara mengukur hasil daya keluaran secara langsung tanpa MPPT. Kedua pengujian dilakukan dengan cara menggunakan MPPT dengan input secara manual. Ketiga pengujian dilakukan dengan menggunakan metode algoritma yang sudah terpasang pada mikrokontroller. Hal ini dilakukan agar hasil dari penelitian dapat diaplikasikan dan dibandingkan. Analisis dilakukan dengan monitoring hasil daya keluaran MPPT.
7. Kesimpulan
Kesimpulan diambil berdasarkan perbandingan hasil simulasi dan implementasi. Dari hasil tersebut dapat diketahui apakah hipotesis yang dibuat sesuai dengan hasil yang didapatkan.
8. Pembuatan Laporan
6
1.5 Sistematika Penulisan
Pada tugas akhir ini pembahasan akan dibagi menjadi 5 bab dengan sistematika sebagai berikut:
BAB 1 : PENDAHULUAN
Bab ini berisi latar belakang pembuatan tugas akhir, permasalahan yang akan diangkat, tujuan serta manfaat tugas akhir, metodologi penulisan dan sistematika penulisan tugas akhir.
BAB 2 : TEORI PENUNJANG
Bab ini berisi teori dasar mengenai pembangkitan listrik tenaga angin, turbin angin, PMSG, konverter dan MPPT. Teori ini digunakan sebagai dasar dalam penulisan tugas akhir.
BAB 3 : PERANCANGAN PENELITIAN
Bab ini berisi data perancangan sistem, pengolahan data yang diperoleh yaitu data turbin angin, data PMSG, dan data konverter. Pada turbin angin data yang diperoleh adalah kecepatan angin dan parameter yang terdapat pada turbin. Data PMSG adalah kecepatan putar rotor, tegangan, arus, dan daya. Perancangan komponen konverter sesuai dengan perhitungan dan pengambilan data dilakukan dengan cara mengukur tegangan dan arus keluaran dari koverter. Data tersebut digunakan untuk pencarian nilai daya maksimum pada turbin angin.
BAB 4 : ANALISIS PENELITIAN
Bab ini berisi mengenai perhitungan hasil daya maksimum dengan beberapa metode MPPT yang berbeda dan evaluasi setiap metode yang digunakan.
BAB 5 : PENUTUP
Bab ini berisi kesimpulan atas hasil yang diperoleh dari penelitian tugas akhir serta saran untuk penelitian selanjutnya.
1.6 Relevansi
7
8
9
BAB 2
TEORI PENUNJANG
2.1 Energi Angin
Energi angin adalah hasil produksi dari reaksi fusi Hidrogen menjadi Helium pada inti matahari. Proses fusi Hidrogen menjadi Helium menimbulkan panas dan radiasi elektromagnetik menyebar ke seluruh angkasa. Sebagian kecil dari radiasi tersebut yang mencapai bumi, dapat memberikan kebutuhan energi diseluruh permukaan bumi [1].
Energi angin merupakan energi yang biasa digunakan sebagai sumber pembangkitan tenaga listrik dan bagian penting dalam kebutuhan energi dunia. Sebagai energi penting di dunia, energi angin mengalami perkembangan teknologi yang sangat cepat. Teknologi pembangkitan tenaga angin dikembangkan untuk dapat terhubung ke dalam sistem kelistrikan. Kapasitas energi angin yang tersedia dan dapat diubah menjadi tenaga listrik sebesar 1.26x109 MW. Kapasitas tersebut lebih
besar 20 kali lipat dibandingkan dengan konsumsi energi dunia saat ini. Dibandingkan dengan sumber daya alam lainnya, energi angin memiliki beberapa keunggulan. Tidak seperti bahan bakar fossil yang menghasilkan gas sisa yang berbahaya maupun energi nuklir yang menimbulkan sisa bahan radioaktif, energi angin merupakan energi yang bersih dan ramah lingkungan. Jika dibandingkan dengan energi baru dan terbarukan lainnya, maka energi angin memiliki keunggulan dalam besarnya biaya investasi yang dikeluarkan perkWh dari pembangkitan energi angin akan lebih murah dibandingkan dengan energi sel surya.
Potensi energi angin di Indonesia banyak ditemui pada pesisir selatan Jawa, Sumatera, dan pulau-pulau di Indonesia bagian timur. Berdasarkan data dari Lentera Angin Nusantara pada tahun 2012, daerah Indonesia bagian timur memiliki energi angin yang potensial untuk dimanfaatkan. Hal ini berbanding terbalik dengan ketersediaan kebutuhan listrik pada daerah tersebut yang sangat minim.
10
semakin besar pula energi angin yang dapat digunakan untuk menghasilkan energi listrik. Variasi perubahan angin dipengaruhi oleh banyak faktor. Faktor yang paling memberikan dampak adalah pemanasan yang tidak merata, gaya coriolis, dan kondisi geografis.
2.1.1Pemanasan Matahari yang Tidak Merata
Diantara faktor lain yang menimbulkan munculnya angin, pemanasan matahari yang tidak merata merupakan faktor yang paling penting dan krusial. Terdapat empat alasan yang menyebabkan pemanasan matahari yang tidak merata.
Pertama, bumi mengelilingi matahari berdasarkan garis orbit yang sesuai dengan equatornya. Pada daerah equator intensitas matahari akan lebih besar dibandingkan dengan daerah kutub, hal ini disebabkan pada garis equator cahaya matahari berbading tegak lurus dengan permukaan bumi, sedangkan pada daerah kutub hampir berbanding lurus atau paralel. Akibat perbedaan ini, menimbulkan perbedaan temperatur suhu dan tekanan pada daerah equator dengan kutub. Udara panas dengan kerapatan rendah yang berada pada equator mengalir ke kutub melalui atnosfer, sedangkan udara dingin dengan kerapatan tinggi mengalir ke equator melalui permukaan bumi.
Kedua, kemiringan rotasi bumi berkisar 23.5º dan berputar pada orbit bumi. Kemiringan ini mengakibatkan siklus pemanasan matahari yang tidak merata, menyebabkan siklus musim tahunan yang berubah.
Ketiga, terdapat berbagai lapisan pada permukaan bumi seperti batu, tanah, pasir, air, dan lain sebagainya. Setiap lapisan ini memiliki kemampuan menyerap dan merefleksikan intensitas cahaya matahari yang berbeda.
Keempat, pemanasan yang tidak merata pada permukaan bumi berdasarkan pada topografi permukaan bumi. Dalam keadaan cerah maupun berawan akan berbeda pada daerah pegunungan dan lembah.
2.1.2Gaya Coriolis
11
ke kanan dan pada bagian selatan angin bergerak ke kiri. Kecepatan maksimum angin tersebut berada pada bagia kutub dan bernilai paling minimum pada garis equator.
2.1.3Kondisi Geografis
Kondisi permukaan tanah dipengaruhi oleh gejala alam dan buatan manusia. Gesekan pada permukaan bumi menyebabkan perlambatan kecepatan angin dan menimbulkan penyebaran arah angin. Tingkatan kecepatan angin berbeda pada setiap ketinggian. Perkiraan yang akurat menunjukan bahwa kecepatan angin meningkat 10% setiap dua kali ketinggiannya.
2.2 Turbin Angin
Turbin angin adalah alat yang digunakan untuk menangkap energi angin. Angin yang melewati area dari sudu bilah turbin angin akan memutar turbin angin. Hasil dari putaran turbin angin dapat dimanfaatkan sebagai energi angin.
2.2.1Tipe Turbin Angin
Beberapa tipe turbin angin yang ada di dunia berdasarkan tingkat efesiensinya diantara lain:
1. Tipe Holland (Belanda) 2. Tipe Savonius
3. Tipe Darius 4. Tipe Linear
5. Tipe 2 blade propeller 6. Tipe 3 blade propeller 7. Tipe multi blade
12
Berdasarkan prinsipnya, turbin angin dapat dibedakan atas dua jenis turbin berdasarkan arah putarannya. Turbin angin yang berputar pada poros horisontal disebut dengan turbin angin poros horisontal atau Horizontal Axis Wind Turbine (HAWT), sementara yang berputar pada poros vertikal disebut dengan turbin angin poros vertikal atau Vertical Axis Wind Turbine (VAWT).
2.2.1.1 Turbin Angin Horisontal
Gambar 2.1 Turbin angin horisontal [1]
Turbin angin horisontal adalah bentuk umum pada turbin angin [6]. Desain turbin ini mirip dengan kincir angin, memiliki blade yang mirip propeller dan berputar pada sumbu vertikal.
Turbin angin horisontal memiliki poros rotor dan generator pada puncak tower dan harus diarahkan ke arah angin bertiup. Turbin-turbin kecil mengarah ke angin dengan menggunakan wind plane yang diletakkan pada rotor, sementara untuk turbin yang lebih besar dilengkapi dengan sensor yang terhubung dengan motor servo yang mengarahkan blade sesuai dengan arah angin. Sebagian besar turbin yang besar memiliki gearbox yang merubah kecepatan putar rotor yang ditransfer ke generator menjadi lebih cepat.
13
Downwind turbine atau turbin dengan arah angin dari belakang juga dibuat, meskipun adanya masalah turbunlensi, karena turbin ini tidak membutuhkan mekanisme yang mengharuskan searah dengan dengan angin. Disamping itu dalam keadaan angin kencang blade dibolehkan untuk melengkung yang mnurunkan cakupan area dan resistansi angin. Namun dikarenakan turbulensi dapat menyebabkan kerusakan sedangkan keandalan sangat dibutuhkan, maka sebagian besar turbin angin horisontal menggunakan jenis upwinnd.
Kelebihan
Towernya yang tinggi memungkinkan untuk mendapatkan angin dengan kekuatan yang lebih besar. Pada beberapa area, setiap 10 meter ada kenaikan tambahan kekuatan angin 20% dan peningkatan daya 34%.
Efisiensi lebih tinggi, karena blade selalu bergerak tegak lurus terhadap arah angin, menerima daya sepanjang putaran. Sebaliknya pada turbin vertikal, melibatkan gaya timbal balik yang membutuhkan permukaan airfoil untuk mundur melawan angin sebagian bagian dari siklus. Backtracking melawan angin menyebabkan efisiensi lebih rendah.
Kekurangan
Dibutuhkan konstruksi tower yang besar untuk menyangga beban blade, gearbox dan generator.
Komponen-komponen dari turbin angin horisontal (blade, gearbox dan generator) harus diangkat ke posisinya pada saat pemasangan.
Karena tinggi, maka turbin ini bisa terlihat pada jarak yang jauh, banyak penduduk lokal yang menolak adanya pemandangan ini.
Membutuhkan kontrol yaw sebagai mekanisme untuk mengarahkan blade ke arah angin
14 2.2.1.2 Turbin Angin Vertikal
Gambar 2.2 Turbin angin vertikal [1]
Turbin angin vertikal memiliki poros rotor vertikal. Kegunan utama dari penempatan rotor ini adalah turbin angin tidak perlu diarahkan ke arah angin bertiup [6]. Hal ini sangat berguna pada daerah dimana arah angin sangat variatif atau memiliki turbulensi.
Dengan sumbu vertikal, generator dan komponen primer lainnya dapat ditempatkan dekat dengan permukaan tanah, sehingga tower tidak perlu menyangga dan hal ini menyebabkan pemeliharaan lebih mudah. Kekurangan utama dari turbin angin vertikal adalah menciptakan dorongan saat berputar.
Sangat sulit untuk memasang turbin angin di tower, sehingga jenis tower ini biasanya dipasang dekat dengan permukaan. Kecepatan angin lebih lambat pada ketinggian yang rendah, sehingga energi angin yang tersedia lebih rendah.
Kelebihan
Tidak diperlukan mekanisme yaw
Sebuah turbin angin bisa terletak dekat tanah, sehingga lebih mudah untuk menjaga bagian yang bergerak.
15
Turbin vertikal dapat dibangun pada lokasi dimana struktur yang tinggi dilarang.
Kekuragan
Kebanyakan turbin vertikal memiliki penurunan efisiensi dibanding turbin horisontal, terutama karena hambatan tambahan yang dimiliki saat diputar angin. Versi yang mengurangi gesekan menghasilkan lebih banyak energi, terutama yang menyalurkan angin ke daerah kolektor.
Memiliki rotor terletak dekat dengan tanah di mana kecepatan angin lebih rendah dan tidak mengambil keuntungan dari kecepatan angin tinggi di atas.
Karena tidak umum digunakan terutama karena kerugian serius yang disebutkan di atas, turbin vertikal menimbulkan masalah baru pada industri angin. Hal ini sering membuat adanya subjek klaim liar dan penipuan investasi selama 50 tahun terakhir. Pemanfaatan turbin angin terbagi ke dalam beberapa skala ketinggian dan kapasitasnya, yaitu skala besar, menengah, kecil dan mikro. Semakin besar skalanya, semakin besar pula kapasitas yang mampu dihasilkan suatu turbin angin.
2.2.2Karakteristik Turbin Angin
16
Gambar 2.3 Kurva daya ideal pada turbin angin [7]
Turbin angin merupakan alat konversi energi angin menjadi energi mekanik. Energi angin (Pwind) merupakan hasil dari setengah kali massa jenis udara (ρ) dengan luas penampang cakupan dari turbin angin (A) dan pangkat tiga dari kecepatan anginnya (v3). Energi tersebut menggerakkan
rotor turbin angin yang terhubung dengan generator untuk menghasilkan listrik. Daya keluaran maksimum dari turbin angin terbatas pada koefisien daya (Cp). Koefisien daya adalah fungsi dari tip speed ratio λ. Nilai dari koefisien daya tidak lebih dari 59.3%. Umumnya, Cp bernilai 25% hingga 45% [8]. Daya mekanik (Pm) yang dihasilkan oleh angin dari rotor turbin
angin dapat dirumuskan sebagai berikut:
𝑃𝑚= 12𝜌𝐶𝑝𝜋𝑅2𝑣3 (2.1)
R = jari-jari turbin angin (m) ρ = massa jenis udara (kg/m3)
v = kecepatan angin (m/s)
Sedangkan torsi T (Nm) yang dihasilkan oleh turbin angin adalah
𝑇 = 𝑃𝑚
𝜔 (2.2)
17
Pada kecepatan yang berubah-ubah, nilai dari koefisien daya merupakan fungsi dari tip speed ratio λ dan blade pitch angle βyang dirumuskan:
𝐶𝑝(λ, β) = 𝐶1(𝐶λ2− 𝐶3𝛽 − 𝐶4) 𝑒(− kecepatan putar rotor turbin angin. Dengan menggunakan persamaan di atas, pemodelan turbin angin dapat diimplementasikan dengan menggunakan spesifikasi sesuai karakter turbin angin. Dalam tugas akhir ini, karena turbin angin yang digunakan memiliki sudut turbin yang statis (fixed pitch), maka nilai dari pitch angle β sama dengan nol untuk mendapatkan nilai Cp maksimal. Setelah semua nilai persamaan
dimasukkan maka akan didapatkan kurva karakteristik dari daya atau torsi mekanik dengan kecepatan pada rotor.
Gambar 2.4 Kurva Cp vs Tip Speed Ratio [7]
18
Nilai efesiensi ini sudah ditentukan dari awal mula sistem (turbin angin) ini didesain. Energi mekanik dari turbin ini berupa kecepatan putar rotor turbin (ω) dan torsinya T, (besar gaya yang diberikan pada suatu panjang lengan beban/blade).
Prinsip kerja dari turbin angin ini dengan menangkap angin menggunakan sudu turbin yang di desain seperti sayap pesawat terbang. Ketika angin bertiup melalui sudu tersebut, maka akan timbul udara bertekanan rendah pada bagian bawah sudu, tekanan udara yang rendah akan menarik sudu untuk bergerak ke area tersebut. Gaya yang ditimbulkan dinamakan gaya angkat. Besarnya gaya angkat ini biasanya lebih kuat dari tekanan pada depan sisi sudu, atau yang biasa disebut gaya tarik. Kombinasi antara gaya angkat dan gaya tarik menyebabkan rotor berputar seperti propeller dan memutar generator. Turbin angin bisa digunakan secara stand-alone, atau bisa dihubungkan ke jaringan transmisi atau bisa dikombinasikan dengan sistem panel surya.
2.3 Parameter Turbin Angin
Turbin angin yang digunakan adalah TSD-500. Turbin angin pada sistem ini merupakan turbin angin horizontal dengan sirip pada bagian belakang yang berguna sebagai penentu arah angin yang akan diambil [8]. Turbin angin tersebut memiliki 3 buah blade propeller. Penggunaan 3 blade propeller dikarenakan kecepatan angin yang ada di Indonesia cukup rendah, sehingga dengan menggunakan turbin jenis ini akan lebih meningkatkan efesiensi dari turbin angin. Tabel 2.1 menunjukkan data turbin angin TSD-500.
Tabel 2.1 Data turbin angin
Nama Turbin TSD-500
Jenis Turbin HAWT (Turbin Angin Horizontal) Daya Keluaran Maksimum 500 Wp pada kecepatan diatas 12m/s
Start Up Wind Speed 2.5 m/s
Cut in Wind Speed 3 m/s
Survival Wind Speed 33 m/s
Tipe Generator 3 Fasa, Magnet Permanen (Teknologi Cogging-less)
Diameter Blade 1.6 m
19
Tabel 2.1 Data turbin angin
Bahan Blade Kayu Pinus
Kecepatan Maksmimum 1000 rpm
Sistem Penyimpanan 24 V
Berat (tanpa tiang) 25 kg
Tinggi Tiang 4 - 6 m
Dibuat oleh NIDEC Japan Corp.
Gambar 2.5 Turbin angin TDS-500 [8]
20
Gambar 2.6 Turbin angin TDS-500 yang terpasang di Ciheras,
Tasikmalaya [8]
Dengan pemodelan secara matematis dapat dihasilkan hubungan antara koefisien daya (Cp) dan tip speed ratio (TSR). Sesuai dengan teori penunjang yang terdapat pada bab II sub-bab 2.2, untuk mendapatkan hubungan antara Cp dan TSR harus diketeahui variabel C1 sampai C8.
Variabel tersebut didaptkan dengan cara mencoba memasukkan nilai tertentu hingga ditemukan besarnya Cp dalam fungsi TSR yang sesuai.
Berdasarkan data perhitungan turbin angin didapatkan Cp maksimum pada 40% dan TSR 6.28. Hasil data perhitungan turbin angin secara teoritis dapat dilihat pada Tabel 2.2.
Tabel 2.2 Hasil data perhitungan turbin angin
21
Tabel 2.2 Hasil data perhitungan turbin angin
Kecepatan
2.4 Permanent Magnet Synchronous Generator
Generator merupakan alat konversi energi mekanik menjadi energi listrik. Generator mengubah torsi (T) dan kecepatan putar rotor (ω) yang diterimanya dari blade menjadi nilai tegangan (V) dan arus (I). Hasil keluaran dari generator ini berupa listrik AC 3 fasa.
Energi mekanik
22 Energi listrik
𝑃𝑒= √3. 𝑉𝐿𝐿. 𝐼𝐿 (2.7)
VLL = tegangan line-to-line (volt)
IL = arus saluran (ampere)
Generator sinkron dengan magnet permanen tidak membutuhkan sistem eksitasi karena sumber eksitasi disediakan oleh magnet permanen pada rotor. Kontrol tegangan untuk sistem eksitasi tidak diperlukan, sehingga mengurangi kesulitan dalam sistem kontrolnya.
Permanent Magnet Synchronous Generator (PMSG) biasanya digunakan untuk membangkitkan listrik pada daya rendah, sehingga penggunaan PMSG sesuai untuk pembangkitan listrik tenaga angin untuk skala kecil. Keuntungan menggunakan sebuah PMSG adalah biaya yang rendah, ketahanan, kesederhanan, dan lebih mudah mengkopling grid, akan tetapi kelemahan utamanya adalah perlunya kompensator faktor daya dan efesiensi yang lebih rendah [9].
Prinsip generator sinkron terdapat hubungan antara frekuensi dan kecepatan yang ditunjukkan dalam persamaan berikut:
𝑁𝑠 = 𝑁𝑟 = 120𝑓𝑝 (2.8)
Nr = kecepatan medan rotor (rpm) Ns = kecepatan medan stator (rpm) p = jumlah kutub
f = frekuensi (Hz)
PMSG mempunyai keuntungan secara ekonomi dan teknik, sehingga PMSG sering dipakai sebagai generator turbin angin. Keuntungannya meliputi:
Efesiensi dan energi yang dihasilkan lebih tinggi.
Tidak diperlukannya power supply tambahan sebagai eksitasi medan magnet.
Perubahan karakteristik efesiensi dan panas dari mesin karena tidak adanya rugi-rugi medan.
23
Torsi yang dihasilkan lebih tinggi.
Perancangan generator harus disesuaikan dengan karakter titik putaran blade sehingga proses konversi energi mekanik menjadi energi listriknya memiliki efesiensi yang tinggi.
2.5 Konverter
Konverter adalah sebuah pengubah. Konverter dapat berupa rectifier (penyearah), konverter (pengubah), dan inverter. Rectifier adalah penyearah dari sinyal gelombang AC menjadi DC. Konverter merupakan pengubah nilai tegangangan ke nilai yang lainnya [10]. Inverter berfungsi untuk mengubah sinyal gelombang DC menjadi AC. Pada buku tugas akhir ini hanya akan dibahas mengenai rectifier dan buck konverter.
2.5.1Rectifier
Penyearah 3 fasa biasa digunakan dalam industri untuk menghasilkan tegangan dc dengan nilai tegangan dan arus yang besar [11]. Skema rangkaian penyearah 3 fasa full-bridge dapat dilihat pada Gambar 2.7.
Gambar 2.7 Rangkaian penyearah 3 fasa full-bridge [11]
24
(a) (b)
Gambar 2.8 (a) Gelombang tegangan, (b) Respon saklar [11]
Pada Gambar 2.8 terlihat bahwa secara berurutan dioda bekerja berpasangan. Penyearah 3 fasa ini sering juga disebut dengan penyearah 6 pulsa, karena hasil keluaran dari penyearah akan menghasilkan 6 puncak gelombang pada satu periode [12]. Lebar tiap puncak adalah 60º, sehingga batas-batas pada kurva sinusoidal yang pertama adalah 60º dan 120º dengan setiap pasangan dioda akan menyala selama 60º. Nilai rata-rata tegangan dc output dapat dihitung berdasarkan luasan yang terbentuk, yang terdiri dari 6 luasan yang sama, dengan batas bawah π/3 dan batas atas 2π/3. Dalam persamaan matematika dijelaskan sebagai berikut:
𝑉𝑎𝑣𝑔=2𝜋1 6 ∫ 𝑉𝑚sin 𝜔𝑡 𝑑𝜔𝑡
2𝜋 3 𝜋
3 (2.9)
𝑉𝑎𝑣𝑔=2𝜋1 6 𝑉𝑚 (2.10)
𝑉𝑎𝑣𝑔= 0.955 𝑉𝑚 (2.11)
Dengan nilai rms tegangan output dc,
𝑉𝑟𝑚𝑠= √2𝜋1 6 ∫ 𝑉𝑚2sin2𝜔𝑡 𝑑𝜔𝑡
2𝜋 3 𝜋
3 (2.12)
25
𝑉𝑟𝑚𝑠 = 0.956 𝑉𝑚 (2.14)
Dapat terlihat pada persamaan (2.11) dan (2.14) bahwa besarnya nilai tegangan rata-rata dan nilai tegangan rms output dc setelah disearahkan bernilai sama.
2.5.2Konverter Buck
Konverter buck merupakan salah satu jenis topologi konverter DC-DC yang berfungsi mengkonversi tegangan DC-DC masukan menjadi tegangan DC lain yang nilai tegangannya lebih rendah (konverter penurun tegangan) [11]. Prinsip kerja rangkaian ini adalah dengan kendali penyaklaran. Polaritas tegangan di sisi masukan akan selalu sama dengan polaritas tegangan keluarannya. Rangkaian konverter buck terdiri atas satu saklar aktif (MOSFET) dan satu saklar pasif (dioda) untuk mengontrol aliran energi dari sumber tegangan DC. Komponen lain yang digunakan adalah induktor dan kapasitor yang berfungsi sebagai filter. Gambar dibawah ini menunjukkan rangkaian konverter buck.
Gambar 2.9 Rangkaian konverter buck [11]
26
adalah penjelasan kedua kondisi tersebut. Periode waktu penyaklaran adalah T, saklar tertutup dalam waktu DT dan saklar terbuka dalam waktu (1-D)T.
Saklar On (Closed)
Gambar 2.10 Rangkaian konverter buck saat kondisi saklar on (closed)
[11]
Ketika saklar dalam kondisi on, dioda akan reverse bias (off) sehingga arus input yang bertambah akan mengalir melewati induktor lalu menuju beban resistor. Tegangan induktor saat saklar tertutup akan:
𝑣𝐿= 𝑉𝑠− 𝑉𝑜= 𝐿𝑑𝑖𝑑𝑡𝐿 (2.15)
𝑑𝑖𝐿
𝑑𝑡 = 𝑉𝑠−𝑉𝑜
𝐿 (2.16)
27 (a)
(b)
Gambar 2.11 (a) Respon tegangan induktor saat saklar on (b) Respon
arus induktor saat saklar on [11]
𝑑𝑖𝐿
𝑑𝑡 = ∆i𝐿
∆t = ∆i𝐿
𝐷𝑇= 𝑉𝑠−𝑉𝑜
𝐿 (2.17)
(∆i𝐿)𝑐𝑙𝑜𝑠𝑒𝑑= (𝑉𝑠−𝑉𝐿𝑜) 𝐷𝑇 (2.18)
Saklar Off (Opened)
Gambar 2.12 Rangkaian konverter buck saat kondisi saklar off (open)
28
Ketika saklar dalam kondisi off, dioda akan forward bias (on) sehingga akan memberikan jalur untuk arus induktor. Tegangan induktor saat saklar terbuka akan:
𝑣𝐿= −𝑉𝑜= 𝐿𝑑𝑖𝑑𝑡𝐿 (2.19)
𝑑𝑖𝐿
𝑑𝑡 = −𝑉𝑜
𝐿 (2.20)
Pada kondisi ini turunan dari arus bernilai negatif, arus akan menurun secara linier. Perubahan arus induktor saat saklar dalam kondisi terbuka dapat dirumuskan sebagai berikut:
(a)
(b)
Gambar 2.13 (a) Respon tegangan induktor saat saklar off (b) Respon
arus induktor saat saklar off [11]
∆i𝐿
∆t = ∆i𝐿
(1−𝐷)𝑇= −𝑉𝑜
𝐿 (2.21)
(∆i𝐿)𝑜𝑝𝑒𝑛= (−𝑉𝐿𝑜) (1 − 𝐷)𝑇 (2.22)
29
menunjukkan bahwa besaran nilai arus induktor dalam satu periode sama dengan 0. Sehingga,
(∆i𝐿)𝑐𝑙𝑜𝑠𝑒𝑑+ (∆i𝐿)𝑜𝑝𝑒𝑛= 0 (2.23)
Dengan mensubstitusi persamaan (2.18) dan (2.23)
(𝑉𝑠−𝑉𝑜
Dalam mendesain konverter buck, besarnya ripple arus induktor digunakan sebagai kriteria desain. Dengan menggunakan persamaan (2.23) dan (2.25) didapatkan nilai induktor untuk Continuous Conduction Mode (CCM) sebagai berikut:
∆i𝐿= (𝑉𝑠−𝑉𝐿𝑜) 𝐷𝑇 = (𝑉𝑠𝐿𝑓−𝑉𝑜) 𝐷 = 𝑉𝑜(1−𝐷)𝐿𝑓 (2.26)
Begitu pula dengan nilai kapasitor, besarnya ripple arus kapasitor digunakan untuk menentukan kapasitas kapasitor yang digunakan. Saat arus kapasitor bernilai positif, kapasitor akan charging. Dari definisi kapasitor didapatkan,
𝑄 = 𝐶𝑉𝑜 (2.28)
∆𝑄 = 𝐶∆𝑉𝑜 (2.29)
∆𝑉𝑜=∆𝑄𝐶 (2.30)
Perubahan muatan ∆Q adalah luasan dari segitiga diatas sumbu x pada Gambar 2.14.
∆𝑄 =12(𝑇2) (∆𝑖𝐿
2) = 𝑇∆𝑖𝐿
30 Sehingga,
∆𝑉𝑜=𝑇∆𝑖8𝐶𝐿 (2.32)
Gambar 2.14 Arus kapasitor [11]
Dengan menggunakan persamaan (2.22) untuk ∆𝑖𝐿,
∆𝑉𝑜=8𝐶𝐿𝑇𝑉𝑜(1 − 𝐷)𝑇 = 𝑉𝑜8𝐿𝐶𝑓(1−𝐷)2 (2.33)
∆𝑉𝑜
𝑉𝑜 =
(1−𝐷)
8𝐿𝐶𝑓2 (2.34)
𝐶 = 8𝐿(∆𝑉1−𝐷
𝑜/𝑉𝑜)𝑓2 (2.35)
2.6 Mikrokontroller
Physical computing adalah membuat sebuah sistem atau perangkat fisik dengan menggunakan software dan hardware yang sifatnya interaktif yaitu dapat menerima rangsangan dari lingkungan dan merespon balik [13]. Physical computing adalah sebuah konsep untuk memudahkan manusia untuk memahami dunia analog dan digital. Dalam praktiknya konsep ini digunakan untuk mendesain alat yang menggunakan sensor dan mikrokontroller untuk menerjemahkan input analog ke dalam sistem software.
31
program. RAM flash memori bersifat non-volatile, digunakan untuk menyimpan program yang dimuat dari komputer. Selain program, flash memori juga menyimpan bootloader. Bootloader adalah program inisiasi yang ukurannya kecil, dijalankan oleh CPU saat daya dihidupkan. Setelah bootloader selesai dijalankan, berikutnya program di dalam RAM akan dieksekusi. EEPROM bersifat non-volatile, digunakan untuk menyimpan data yang tidak boleh hilang saat daya dimatikan. Central Processing Unit (CPU) merupakan bagian dari mikrokontroller untuk menjalankan setiap instruksi dari program.
Gambar 2.15 Blok diagram mikrokontroller ATmega
Mikrokontroller digunakan untuk mengolah data yang terbaca oleh sensor arus dan tegangan. Pada mikrokontroller ini diberikan perintah untuk mengatur besarnya duty cycle yang akan dikeluarkan sesuai dengan nilai arus dan tegangan. Pada mikrokontroller ini terdapat algoritma modified perturb and observe sebagai metode MPPT. Mikrokontroller juga memiliki tugas yaitu mengirim data pembacaan nilai sensor arus dan tegangan ke dalam komputer, sehingga performa dari algoritma yang dirancang dapat dilihat pada komputer.
2.6.1Arduino
32
IDE adalah sebuah software yang berfungsi untuk menulis program, meng-compile menjadi kode biner dan meng-upload ke dalam memori mikrokontroller.
Arduino MEGA 2560 adalah salah satu jenis Arduino. Arduino tipe ini berbasis mikrokontroller ATmega 2560. Arduino tipe ini memiliki 54 pin digital input/output yang terdiri dari 15 pin yang dapat digunakan sebagai output PWM, 16 input analog, 4 serial antar muka, 16 MHz crystal oscillator, koneksi USB, catu daya, ICSP header, dan tombol reset [14]. Tabel 2.3 menunjukkan spesifikasi dari Arduino MEGA 2560.
Tabel 2.3 Spesifikasi Arduino MEGA 2560
Mikrokontroller ATmega 2560 Tegangan operasi 5 V
Tegangan masukan (rekomendasi) 7-12 V Tegangan masukan (batasan) 6-20 V
Pin digita I/O 54 (15 pin PWM) Pin analog masukan 16
Arus DC setiap pin I/O 20 mA
33
2.7 Maximum Power Point Tracking
Maximum Power Point Tracking atau yang sering disebut dengan MPPT adalah metode pelacakan nilai daya maksimum dari suatu sistem. Pada suatu titik tertentu sistem tersebut memiliki nilai daya maksimum. Daya keluaran yang maksimal ini akan menghasilkan efesiensi yang tinggi. Prinsip kerja dari MPPT adalah dengan menaikkan dan menurunkan tegangan kerja. Hal tersebut dapat dilakukan dengan mengatur duty cycle pada konverter. Perubahan besar nilai daya tergantung dari perubahan nilai tegangan dan arus.
Pada turbin angin MPPT digunakan untuk mengoptimalkan keluaran daya maksimum dari generator. Setiap kecepatan angin memiliki daya maksimum yang berbeda-beda. Generator yang terhubung dengan turbin angin akan menghasilkan daya maksimum apabila metode yang digunakan pada MPPT dapat bekerja sesuai dengan karakteristik angin. Metode yang digunakan pada MPPT bervariasi sesuai dengan algoritma yang digunakan.
2.7.1Perturb and Observe
34
Gambar 2.16 Flowchart metode perturb and observe
35
Gambar 2.17 Metode perturb and observe dengan large step size [4]
Dari Gambar 2.17 dapat terlihat bahwa besarnya nilai ∆D akan menyebabkan osilasi yang besar karena fluktuatif dari perubahan daya yang dihasilkan ketika sudah berada pada titik daya maksimum.
Gambar 2.18 Metode perturb and observe dengan small step size [4]
Sedangkan jika nilai ∆D kecil menyebabkan langkah menuju titik daya maksimum akan semakin banyak. Hal ini menyebabkan besarnya waktu yang dibutuhkan untuk mendapatkan titik daya maksimum.
2.7.2Modified Perturb and Observe
36
titik maksimum daya yang dihasilkan. Ketika titik maksimum daya sudah didapatkan maka besaran ∆D akan dikalikan dengan konstanta dengan nilai antara 0-1, sehingga besaran ∆D akan semakin kecil. Dengan perubahan besaran nilai dari ∆D maka pada saat awal inisiasi nilai ∆D digunakan yang besar dan nantinya saat sudah mencapai titik nilai daya maksimum maka secara otomatis ∆D akan menjadi kecil. Prinsip kerja dari modified perturb and observe dapat dilihat pada Gambar 2.19.
Mulai
Baca Nilai V(n) dan I(n) dari sensor
P(n) = V(n)*I(n)
∆V = V(n) - V(n-1) ∆P = P(n) - P(n-1)
∆P > 0
∆V > 0 ∆V > 0
D - ∆D D + ∆D
P(n-1) = P(n) V(n-1) = V(n) D - ∆D
D + ∆D
Y N
Y N Y N
∆D = ∆D*C
37
38
39
BAB 3
PERANCANGAN PENELITIAN
3.1 Desain Sistem
Perancangan desain sistem optimalisasi turbin angin menggunakan maximum power point tracking (MPPT) berupa software dan hardware. Untuk perancangan software digunakan PowerSIM sebagai bahan simulasi desain sistem yang akan dibuat dan Arduino sebagai mikrokontroller dari pembangkit sinyal pulsewidthmodulation (PWM). Hardware yang digunakan berupa turbin angin, permanent magnet synchronous generator (PMSG), konverter buck, sensor arus dan tegangan.
Proses perancangan sistem turbin angin dengan MPPT menggunakan metode modified perturb and observe dilakukan dengan menggunakan turbin angin sebagai penggerak rotor pada PMSG, PMSG sebagai generator yang menghasilkan listrik, daya keluaran PMSG disearahkan dengan menggunakan rectifier 3 fasa full-bridge, rangkaian konverter buck digunakan untuk mengatur besar tegangan, konverter buck terkontrol oleh MPPT sehingga keluaran daya pada konverter menghasilkan daya maksimum. Gambar 3.1 menjelaskan mengenai skema rancangan desain sistem.
PMSG Rectifier Konverter Buck
Gambar 3.1 Diagram sistem turbin angin dengan MPPT
40
duty cycle (lebar pulsa) pada sinyal PWM maka akan mengubah nilai tegangan output dari konverter buck sesuai dengan titik daya maksimum dari turbin angin. Keluaran dari konverter buck kemudian dapat langsung dihubungkan ke beban.
Gambar 3.2 Perangkat sistem turbin angin
3.2 Pengambilan Data PMSG
41
Gambar 3.3Permanent magnet synchronous generator dengan motor
induksi
42
3.3 Perancangan Sensor
Dalam sistem MPPT ini digunakan dua macam sensor, yaitu sensor tegangan dan sensor arus. Sensor tegangan berfungsi sebagai pembaca nilai tegangan pada rectifier sekaligus pengubah nilai tegangan untuk masukan dari mikrokontroller. Begitu juga dengan sensor arus sebagai pembaca nilai arus pada rectifier dan masukan nilai arus pada mikrokontroller. Berikut ini akan dibahas mengenai perancangan kedua sensor tersebut.
Gambar 3.4 Sensor arus dan sensor tegangan
3.3.1Sensor Tegangan
43
V
inV
outR
1R
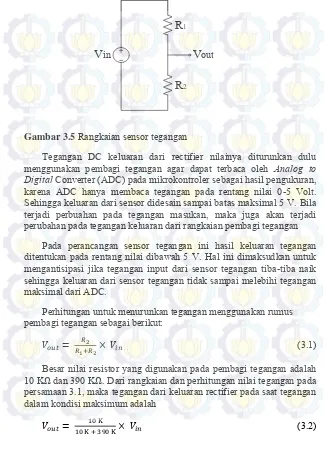
2Gambar 3.5 Rangkaian sensor tegangan
Tegangan DC keluaran dari rectifier nilainya diturunkan dulu menggunakan pembagi tegangan agar dapat terbaca oleh Analog to Digital Converter (ADC) pada mikrokontroler sebagai hasil pengukuran, karena ADC hanya membaca tegangan pada rentang nilai 0-5 Volt. Sehingga keluaran dari sensor didesain sampai batas maksimal 5 V. Bila terjadi perbuahan pada tegangan masukan, maka juga akan terjadi perubahan pada tegangan keluaran dari rangkaian pembagi tegangan
Pada perancangan sensor tegangan ini hasil keluaran tegangan ditentukan pada rentang nilai dibawah 5 V. Hal ini dimaksudkan untuk mengantisipasi jika tegangan input dari sensor tegangan tiba-tiba naik sehingga keluaran dari sensor tegangan tidak sampai melebihi tegangan maksimal dari ADC.
Perhitungan untuk menurunkan tegangan menggunakan rumus pembagi tegangan sebagai berikut:
𝑉𝑜𝑢𝑡= 𝑅1𝑅+𝑅22× 𝑉𝑖𝑛 (3.1)
Besar nilai resistor yang digunakan pada pembagi tegangan adalah 10 KΩ dan 390 KΩ. Dari rangkaian dan perhitungan nilai tegangan pada persamaan 3.1, maka tegangan dari keluaran rectifier pada saat tegangan dalam kondisi maksimum adalah
44
𝑉𝑜𝑢𝑡= 0.025 𝑉𝑖𝑛 (3.3)
3.3.2Sensor Arus
Sensor arus yang digunakan untuk membaca nilai arus keluaran pada rectifier menggunakan ACS758LCB-050. Sensor tersebut dapat membaca nilai arus hingga 50 Ampere. Keluaran dari arus ini merupakan tegangan yang proporsional dengan nilai arus masukan yang dibaca, dengan sentitivitas 40 mV/A. Dengan menggunakan sensor arus, maka akan menyederhanakan pembacaan dari arus sekaligus dapat dijadikan acuan masukan dari mikrokontroller. Bagian sensing dan keluaran dari sensor ini terpisah, sehingga arus besar yang lewat sama sekali tidak membahayakan bagian keluaran yang tersambung dengan mikrokontroller yang bekerja dalam rentang arus kecil.
Pada sisi keluaran sensor terpasang pengaman berupa dua buah dioda yang berfungsi untuk memotong tegangan keluaran dari sensor. Hal ini dilakukan untuk mengurangi resiko rusaknya mikrokontroller akibat dari besarnya nilai sisi masukan pada sensor.
3.4 Rectifier
Rectifier yang digunakan dalam tugas akhir ini adalah penyearah 6 pulsa tidak terkontrol. Dengan menggunakan tiga pasang dioda yang bekerja secara bergantian, maka tegangan AC akan diubah menjadi tegangan DC yang memiliki enam puncak gelombang. Penyearah 6 pulsa tidak terkontrol dipilih untuk mempermudah kontrol dari penyearah.
Dalam penggunaan rectifier pada sstem turbin angin ini juga digunakan kapasitor. Kapasitor digunakan untuk memperhalus tegangan keluaran rectifier. Kapasitor yang digunakan memiliki kapasitas 2200 µF.
3.5 Arduino MEGA 2560
45
Gambar 3.6Board Arduino MEGA 2560
Analog input yang digunakan adalah port A0 sebagai hasil pembacaan dari sensor tegangan dan port A4 sebagai hasil pembacaan dari sensor arus. Port PWM yang digunakan sebagai keluaran dari duty cycle adalah port 13. Port 13 digunakan karena pada port ini ada LED sebagai indikator, sehingga dapat diketahui apakah Arduino sudah bekerja mengeluarkan duty cycle atau belum. Frekuensi keluaran dari Arduino MEGA 2560 pada bagian port PWM adalah sebesar 490 Hz, kecuali port 4 dan 13 yang memiliki frekuensi 980 Hz. Desain dari perancangan konverter buck bekerja pada frekuensi 31.25 kHz, sehingga diperlukan perubahan besaran frekuensi dari Arduino. Hal ini dapat dilakukan dengan memasukkan library pada Arduino untuk mengubah frekuensi yang dikeluarkan.
Tabel 3.2 Parameter Arduino MEGA 2560
Analog input tegangan A0 Analog input arus A4 Frekuensi kerja 31.25 kHz
46
3.6 Optocoupler dan PWM Driver
Rangkaian optocoupler berfungsi sebagai pemisah rangkaian pembangkit pulsa pada sisi masukan dengan rangkaian keluaran. Sehingga jika terjadi gangguan pada rangkaian keluaran tidak berpengaruh pada rangkaian pembangkit pulsa. Hasil pulsa keluaran optocoupler berbanding terbalik dengan pulsa masukannya. Tegangan keluaran pada optocoupler terlalu kecil, sehingga digunakan IC optocoupler FOD 3182V, karena IC optocoupler FOD 3182V berfungsi sebagai optocoupler sekaligus power MOSFET gate driver karena IC FOD 3182V sudah terintegrasi dengan rangkaian pull-up transistor didalamnya.
Pada rangkaian optocoupler sumber tegangan untuk PWM harus berbeda dengan sumber untuk pull-up pada keluaran rangkaian, sehingga terdapat dua sumber catu daya. Sumber tegangan untuk optocoupler yang digunakan sebesar 15 V agar MOSFET pada konverter buck dapat membaca sinyal PWM dengan baik. Sedangkan untuk ground pada kaki nomor 3 dan ground pada kaki nomor 6 harus dipisahkan. Hal tersebut dimaksudkan agar fungsi optocoupler sebagai pemisah rangkaian dapat bekerja untuk mengamankan mikrokontroller dari arus balik dari MOSFET pada konverter buck yang mungkin terjadi.
PWM driver pada rangkaian ini berupa IC 7404 yang berisi rangkaian logika gerbang not. Fungsi dari gerbang logika not ini adalah untuk mengembalikan bentuk sinyal PWM yang terbalik akibat dari penggunaan optocoupler sebagai pemisah rangkaian.
3.7 Perancangan Konverter Buck
Berdasarkan penjelasan teori perhitungan pada bab II sub-sub-bab 2.4.2 dapar ditentukan besarnya nilai induktor dan kapasitor. Konverter buck merupakan penurun tegangan DC ke DC dengan penyaklaran pada MOSFET. Penyaklaran MOSFET bekerja pada saat gate diberikan tegangan. Persamaan konversi tegangan dapat dilihat pada persamaan di bawah ini:
𝑉𝑜= 𝑉𝑠 𝐷 (3.4)
47
tegangan keluaran akan semakin besar mendekati nilai tegangan masukan. MPPT harus mencari nilai duty cycle, sehingga daya yang dihasilkan turbin angin berada pada nilai maksimal.
Dalam perancangan konverter buck mengacu pada hasil keluaran tegangan dari rectifier yang terhubung dengan permanent magnet synchronous generator dan turbin angin. Nilai masukan dari konverter buck memiliki variasi tegangan 37 V hinnga 100 V dan arus 0.3 A hingga 3 A. Spesifikasi dari konverter yang dirancang dapat dilihat pada Tabel 3.3.
Tabel 3.3 Spesifikasi konverter buck
Parameter Nilai Induktor 10
mH
Kapasitor 300 µF Frekuensi 31.5 kHzDalam pembuatan tugas akhir ini fokus dari pembahasan adalah algoritma yang digunakan untuk mencari nilai daya maksimum pada turbin angin. Konverter buck pada pembuatan tugas akhir ini bukanlah inti utama, sehingga analisa mengenai efesiensi, ripple tegangan, penyaklaran, dan hal lain yang berkaitan dengan kualitas konverter buck tidak dibahas dalam penelitian ini.
48
3.8 Perturb and Observe
Algoritma perturb and observe memiliki beberapa parameter sebagai inisialisasi nilai awal dan besar perubahan nilai step size dari setiap iterasi yang dilakukan. Batasan duty cycle juga diperlukan dalam menjalankan algoritma ini dikarenakan untuk menjaga kemampuan dari konverter buck. Waktu tunda dalam menjalankan program dalam satu kali iterasi ditentukan untuk memberikan respon balik akibat perubahan dari nilai duty cycle yang diberikan. Tabel 3.4 menunjukkan parameter yang digunakan pada algoritma perturb and observe.
Tabel 3.4 Parameter algoritma perturb and observe
Batasan duty cycle 0.2-0.8
Step size 0.015
Delay 0.5-1 detik
3.9 Modified Perturb and Observe
Algoritma modified perturb and observe juga memiliki beberapa parameter sebagai inisialisasi nilai awal dan besar perubahan nilai step size dari setiap iterasi yang dilakukan. Pada modified perturb and observe nilai step size akan berubah sesuai dengan respon dari sistem. Perubahan tersebut ditentukan oleh konstanta nilai C yang ditentukan. Batasan nilai duty cycle juga ditentukan untuk menjaga kemampuan dari konverter buck. Waktu tunda dalam menjalankan program dalam satu kali iterasi ditentukan untuk memberikan respon balik akibat perubahan dari nilai duty cycle yang diberikan. Tabel 3.5 menunjukkan parameter yang digunakan pada algoritma modified perturb and observe.
Tabel 3.5 Parameter algoritma modified perturb and observe
Batasan duty cycle 0.2-0.8
Step size 0.015
Konstanta C 0.8
![Gambar 2.1 Turbin angin horisontal [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1803850.2099029/32.420.49.372.64.530/gambar-turbin-angin-horisontal.webp)
![Gambar 2.2 Turbin angin vertikal [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1803850.2099029/34.420.50.371.89.512/gambar-turbin-angin-vertikal.webp)
![Gambar 2.3 Kurva daya ideal pada turbin angin [7]](https://thumb-ap.123doks.com/thumbv2/123dok/1803850.2099029/36.420.49.372.74.508/gambar-kurva-daya-ideal-pada-turbin-angin.webp)
![Gambar 2.4 Kurva Cp vs Tip Speed Ratio [7]](https://thumb-ap.123doks.com/thumbv2/123dok/1803850.2099029/37.420.48.373.73.518/gambar-kurva-cp-vs-tip-speed-ratio.webp)