ANALISA dan PENGUJIAN ALAT
Dalam bab ini akan disampaikan pengujian disertakan teori perhitungan pergerakkan motor DC, motor stepper, interpolasi motor stepper, input digital fotosensor, barcode scanner input string.
4.1 Pengujian PWM (Pulse Width Modulation) Motor DC
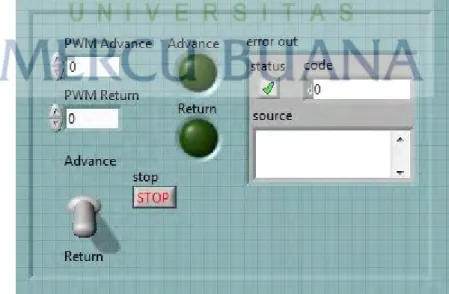
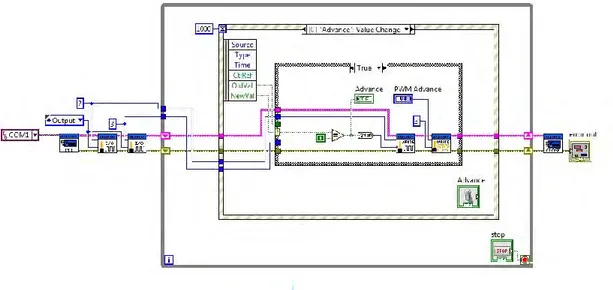
Tampilan program front panel dan wiring diagram LabVIEW untuk pengujian PWM dapat dilihat pada gambar 4.1 dan 4.2 di bawah ini :
Gambar 4.2 Program Trial Wiring Diagram LabVIEW Motor DC
Pada tabel 4.1 dibawah adalah hasil pengujian software untuk mengkonversi duty cycle menjadi nilai tegangan yang akan mempengaruhi kecepatan putaran motor DC (Fork Motor Advance/Return). Penulis akan menampilkan hubungan duty cycle (%) dengan dengan tegangan keluaran (v out) yang diukur dengan multimeter.
Berikut adalah persamaan yang digunakan dalam perhitungan tegangan keluaran yang dihasilkan dari pengaturan PWM :
𝐷𝑢𝑡𝑦 𝐶𝑦𝑐𝑙𝑒 =
𝑡 𝑜𝑛+𝑡 𝑜𝑓𝑓𝑡 𝑜𝑛𝑥 100%
[Persamaan 4.1]𝑉 𝑜𝑢𝑡 = 𝐷𝑢𝑡𝑦 𝐶𝑦𝑐𝑙𝑒 𝑥 𝑉 𝑆𝑢𝑚𝑏𝑒𝑟
[Persamaan 4.2]Dari persamaan di atas, penulis melakukan beberapa pengujian, dan berikut adalah contoh penerapan rumus di atas dengan metode sampling yang penulis lakukan :
Duty Cycle = 90 255
x 100% = 35, 29 %
V out = 35,29% x 5 Volt = 35,29 100x 5 Volt
= 1, 76 VoltBerikut adalah tabel perbandingan antara hasil perhitungan dan hasil pengujian secara aktual yag telah dilakukan :
Tabel 4.1 Perbandingan data perhitungan dengan aktual motor DC
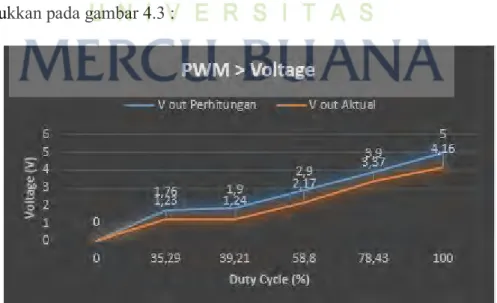
Dari hasil pengujian pada tabel di atas, maka diperoleh grafik seperti yang ditunjukkan pada gambar 4.3 :
Dengan demikian tingkat keakuratan yang dihasilkan oleh alat penyimpanan dan pengambilan barang otomatis berbasis LabVIEW ini dalam pengendalian motor DC, berdasarkan data-data yang telah didapat dari beberapa percobaan sebelumnya dapat ditentukan dengan perhitungan menggunakan persamaan sebagai berikut :
𝐸𝑟𝑟𝑜𝑟 = 𝐷𝑎𝑡𝑎 𝐴𝑘𝑡𝑢𝑎𝑙 − 𝐷𝑎𝑡𝑎 𝑃𝑒𝑟ℎ𝑖𝑡𝑢𝑛𝑔𝑎𝑛
𝐾𝑒𝑎𝑘𝑢𝑟𝑎𝑡𝑎𝑛 (%) = 100% − [( 𝐸𝑟𝑟𝑜𝑟
𝐷𝑎𝑡𝑎 𝑃𝑒𝑟ℎ𝑖𝑡𝑢𝑛𝑔𝑎𝑛) 𝑥 100%]
Dimana ;
Error : Selisih/penyimpangan nilai antara aktual dengan perhitungan
Data Aktual : Data yang didapat dari pengukuran aktual (rata-rata) Data Perhitungan : Data yang didapat menggunakan perhitungan (rata-rata)
Keakuratan : Nilai persentase keakuratan proses
Berdasarkan persamaan di atas, maka didapat nilai keakuratan dalam pengendalian motor DC sebesar 78,64% dengan perhitungan sebagai berikut :
Data aktual (rata-rata) = (1,23+1,24+2,17+3,37+4,16)V / 5 = 2,43V Data Perhitungan (rata-rata) = (1,76+1,9+2,9+3.9+5)V/5 = 3,09V
Error = Data Aktual – Data Perhitungan
= 2,43 – 3,09 = - 0,66 Keakuratan (%) = 100% - [(0,663,09)x 100%]
= 100% - 21,36% = 78.64%
Perbedaan nilai antara perhitungan dengan aktual terjadi karena pada proses perhitungan, semua kondisi (faktor mekanik, elektromagnetik, durasi
pemakaian untuk alat sebelumnya, noise, dsb) ditiadakan atau dianggap ideal. Sedangkan aktualnya ada faktor-faktor tersebut yang menyebabkan penyimpangan nilai dari yang diharapkan.
4.2 Program Motor Stepper
Pengujian motor stepper dibagi menjadi dua, yaitu pengujian pergeserasan motor stepper, dan pengujian pergeseran interpolasi motor stepper rak 4 sampai rak 9.
4.2.1 Pengujian Pergeseran Motor Stepper
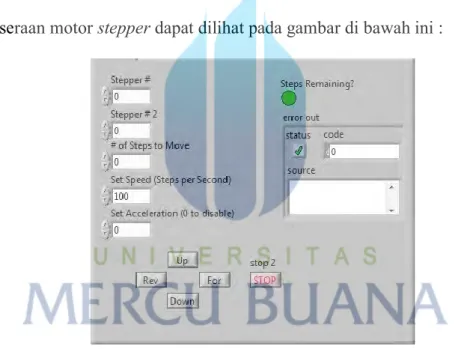
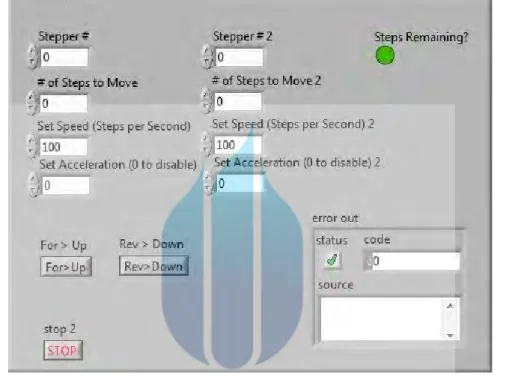
Tampilan program front panel dan wiring diagram LabVIEW untuk pergeseraan motor stepper dapat dilihat pada gambar di bawah ini :
Gambar 4.4 Program Trial Front Panel LabVIEW Motor Stepper
Pada tabel 4.2 di bawah adalah hasil pengujian pergerakkan motor stepper (rotary) terhadap perpindahan jarak yang terjadi pada ball screw (linier). Penulis akan menampilkan hubungan pulsa yang diberikan oleh PC-LabVIEW terhadap perubahan jarak yang dihasilkan, dimana penulis menggunakan mistar saat mengukur perpindahan jarak yang dihasilkan.
Berikut adalah persamaan yang digunakan dalam perhitungan perpindahan jarak (ΔS) yang dihasilkan dari pengaturan sinyal pulsa (step) yang diberikan :
1 𝑠𝑡𝑒𝑝 = 1.8°
;
1 𝑟𝑒𝑣 = 360°
;
1 𝑟𝑒𝑣 =
360°1.8°= 200 𝑠𝑡𝑒𝑝
;
1 𝑟𝑒𝑣 = 4𝑚𝑚 (𝑏𝑎𝑙𝑙 𝑠𝑐𝑟𝑒𝑤)
Tabel 4.2 Perbandingan data perhitungan dengan aktual pergerakkan motor stepper
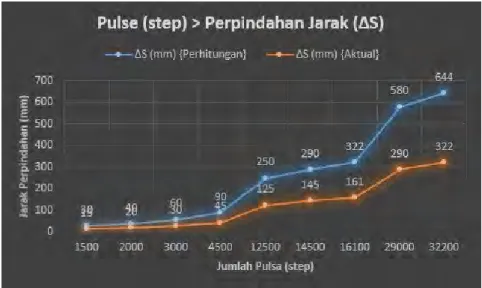
Dari hasil pengujian diatas, maka didapat data perbandingan antara hasil perhitungan dan hasil pengujian secara aktual dalam bentuk grafik, adapun grafik dapat dilihat pada gambar 4.6 berikut :
Gambar 4.6 Grafik perbandingan data perhitungan dengan aktual pergerakkan motor
stepper
Berdasarkan data percobaan di atas, maka didapat nilai keakuratan dalam pengendalian motor stepper sebesar 50%, dengan perhitungan sebagai berikut : Data aktual (rata-rata) = (15+20+30+45+125+145+161+290+322)mm / 9
= 1153 mm
Data Perhitungan (rata-rata) = (30+40+60+90+250+290+322+580+644)mm / 9 = 2306 mm
Error = Data Aktual – Data Perhitungan
= 1153 – 2306 = - 1153 Keakuratan (%) = 100% - [(11532306)x 100%]
= 100% - 50% = 50%
Perbedaan nilai antara perhitungan dan aktual yang sangat signifikan pada percobaan di atas, penulis mengambil kesimpulan bahwa spesifikasi original motor stepper tidak sama dengan aktualnya. Hal ini bisa terjadi, karena motor stepper
yang penulis gunakan pada perancangan alat ini, sudah melalui proses modifikasi (built up) oleh supplier dimana penulis mendapatkan motor stepper ini.
4.2.2 Pengujian Pergeseran Interpolasi Motor Stepper Rak 4 sampai 9 Berikut ini adalah tampilan program untuk pengujian pergeseran interpolasi atau simultan motor stepper dari rak 4 sampai rak 9.
Gambar 4.7 Program Trial Front Panel LabVIEW Interpolasi Motor Stepper
Gambar 4.8 Program Trial Wiring Diagram LabVIEW Interpolasi Motor Stepper Untuk pengujian pergeseran interpolasi motor stepper (Lifter dan Travel Motor), penulis menggunakan metode pendekatan waktu, dengan jarak (step) dan
nilai percepatan (acceleration) yang konstan dan merubah nilai kecepatan (set speed), sehingga didapat waktu yang paling mendekati titik acuan interpolasi. Pada sub-subbab ini penulis akan memulai dengan pergeseran interpolasi motor stepper pada rak 4 sampai 9. Dapat di lihat di bawah ini tabel hasil pengujian yang telah penulis lakukan, dan didapati waktu yang paling mendekati. Adapun titik acuan interpolasi penulis tentukan pada motor stepper (Travel Motor).
Pada pengujian pergeseran rak 4, waktu yang ditempuh oleh motor Travel Motor adalah 11,76 detik, maka pengujian yang dilakukan adalah pendekatan waktu yang ditempuh Lifter Motor mendekati 11,76 detik.
Tabel 4.3 Data pendekatan waktu pergeseran interpolasi motor stepper rak 4
Pada pengujian pergeseran rak 5, waktu yang ditempuh oleh motor Travel Motor adalah 8,11 detik, maka pengujian yang dilakukan adalah pendekatan waktu yang ditempuh Lifter Motor mendekati 8,11 detik.
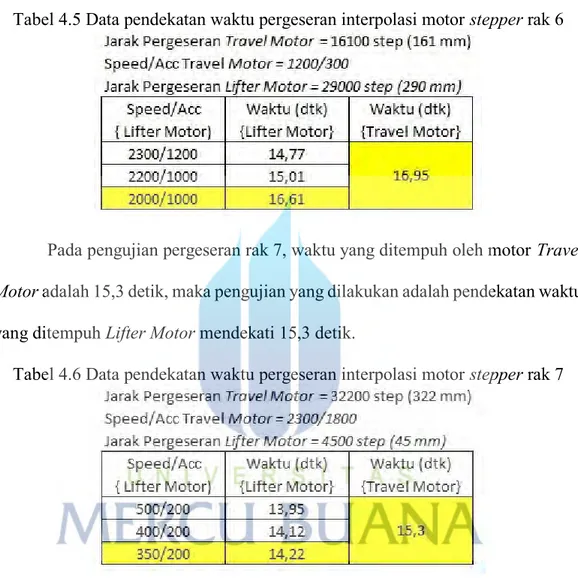
Pada pengujian pergeseran rak 6, waktu yang ditempuh oleh motor Travel Motor adalah 16,95 detik, maka pengujian yang dilakukan adalah pendekatan waktu yang ditempuh Lifter Motor mendekati 16,95 detik.
Tabel 4.5 Data pendekatan waktu pergeseran interpolasi motor stepper rak 6
Pada pengujian pergeseran rak 7, waktu yang ditempuh oleh motor Travel Motor adalah 15,3 detik, maka pengujian yang dilakukan adalah pendekatan waktu yang ditempuh Lifter Motor mendekati 15,3 detik.
Tabel 4.6 Data pendekatan waktu pergeseran interpolasi motor stepper rak 7
Pada pengujian pergeseran rak 8, waktu yang ditempuh oleh motor Travel Motor adalah 16,21 detik, maka pengujian yang dilakukan adalah pendekatan waktu yang ditempuh Lifter Motor mendekati 16,21 detik.
Tabel 4.7 Data pendekatan waktu pergeseran interpolasi motor stepper rak 8
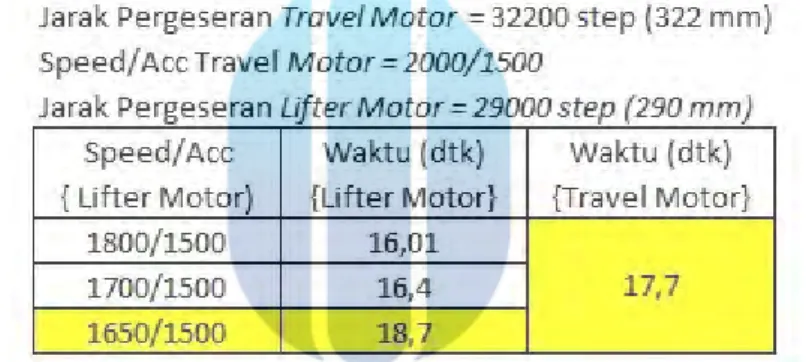
Pada pengujian pergeseran rak 9, waktu yang ditempuh oleh motor Travel Motor adalah 17,7 detik, maka pengujian yang dilakukan adalah pendekatan waktu yang ditempuh Lifter Motor mendekati 17,7 detik.
Tabel 4.8 Data pendekatan waktu pergeseran interpolasi motor stepper rak 9
Dari hasil pengujian pendekatan waktu interpolasi pergerakkan motor stepper didapat parameter kecepatan (speed) yang bisa diatur agar motor stepper (Travel Motor) dan (Lifter Motor) bisa berjalan secara interpolasi/simultan menuju rak 4 sampai 9. Terdapat perbedaan waktu yang didapat, karena untuk mendapatkan pergerakkan motor stepper secara interpolasi/simultan, dilakukan beberapa kali pengujian dengan mengatur parameter kecepatan (speed) yang berbeda-beda, penulis menganalisa kemungkianan yang menjadikan adanya perbedaan waktu adalah karena parameter kecepatan (speed) yang tidak sama. Adapun penulis menggambarkan hasil pengujian ini dalam bentuk grafik di bawah ini :
Gambar 4.9 Grafik Hasil Pengujian Pendekatan Waktu Pergeseran Interpolasi Motor Stepper (Travel Motor dan Lifter Motor)
4.3 Pengujian Input Digital Fotosensor
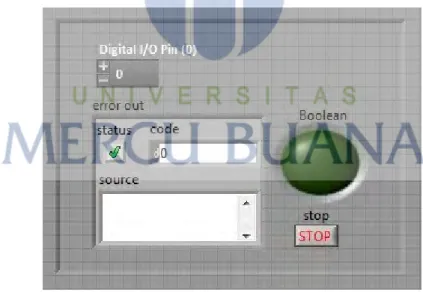
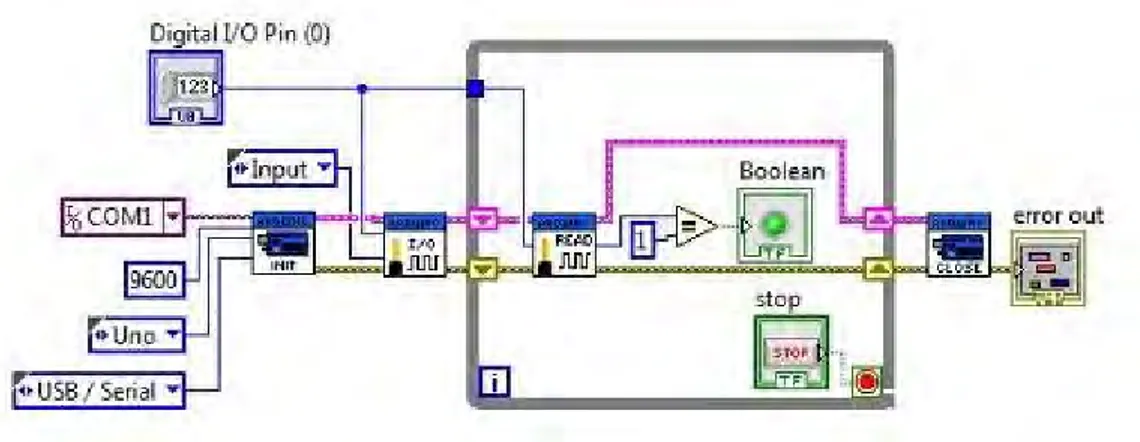
Di bawah ini adalah tampilan program front panel dan wiring diagram LabVIEW untuk pengujian input digital fotosensor
Gambar 4.11 Program Trial Wiring Diagram LabVIEW Fotosensor Input Digital Pada bagian pengujian fotosensor ini, input yang dikeluarkan oleh arduino ke LabVIEW adalah data integer 1 untuk nyala, dan 0 untuk mati. Penulis menggunakan metode menghalangi fotosensor pada pengujian ini, jika lampu indikator pada LabVIEW menyala berarti fotosensor bekerja dengan baik. Adapun tabel hasil pengujian fotosensor dapat dilihat di bawah ini :
Tabel 4.9 Hasil Pengujian Fotosensor Input Digital
Pada tabel di atas dihasilkan indikator fotosensor pada LabVIEW menyala jika fotosensor dihalangi. Dari data di atas didapat, bahwa rangkaian fotosensor bekerja dengan baik, pada program LabVIEW.
4.4 Pengujian Input Barcode Scanner
Pada pengujian barcode scanner ini, penulis menggunakan 3 sampel kode barcode yang akan discan dengan barcode scanner, dan data akan tampil pada LabVIEW.
Gambar 4.12 Kode Barcode yang digunakan untuk pengujian barcode scanner
Gambar 4.13 Program Trial Front Panel LabVIEW Input Barcode Scanner
Data yang dihasilkan pada pengujian barcode scanner ini, sama dengan data yang diinput oleh barcode scanner. Untuk itu penulis tidak menggunakan tabel, karena dari Gambar 4.11, sudah mewakili bahwa data input barcode scanner sudah benar.
4.5 Pengujian Penyimpanan dan Pengambilan Barang Otomatis
Pada pengujian ini dilakukan percobaan dengan menggunakan keselurahan sistem secara otomatis. Untuk proses penyimpanan barang menggunakan barcode scanner sebagai input, kemudian data hasil scan diterima oleh LabVIEW. Data tersebut akan diinisialisasi oleh LabVIEW untuk mengendalikan aktuator (motor DC dan motor stepper) bergerak menuju rak yang diinginkan. Adapun hasil yang didapat dapat dilihat pada tabel 4.10.
Tabel 4.10 Hasil Pengujian Proses Penyimpanan Barang Otomatis
Dan untuk proses pengambilan barang dengan memasukkan kode (RACK “ “) di kolom “Retrieve” pada tampilan front panel auto LabVIEW. Dapat dilihat hasil pengujian pada tabel 4.11 di bawah ini :
Tabel 4.11 Hasil Pengujian Proses Pengambilan Barang Otomatis
Dari data pengujian di atas, didapat bahwa LabVIEW dapat mengendalikan aktuator (motor DC dan motor stepper) untuk berjalan menuju rak yang diinginkan sesuai input (proses penyimpanan atau pengambilan).