I E E E
T R A N S A C T I O N S O N
GEO S CI EN CE AN D
R EM O TE S EN S I N G
OCT OBER 1 9 9 1 V O L U M E G E - 1 9 N U M B E R 4
A PUBLICATION OF THE IEEE GEOSCIENCE AND REMOTE SENSING SOCIETY
PAPERS
Regression Techniques for Oceanographic Parameter Retrieval Using Space-Borne Microwave Radiometry . . . . . . . R. and E. G. Njoku 178
Freshwater Ice Thickness Observations Using Passive Microwave Sensors . . . .
. . . . 1 8 9 Direct Determination of the Two-Dimensional Image Spectrum from Raw Synthetic Aperture Radar Data . . . .
. . . P . 1 9 4 HF Radio Wave Transmission Over Sea Ice and Remote Sensing Possibilities . . . D. A. Hi// J. R. Wait 2 0 4
HF Ground Wave Propagation Over Mixed Land, Sea, and Sea-Ice Paths . . . D. A. Hi// and J. R. Wait 210 A Fast Optimal Algorithm for Real Seismic Data Using Predictor Model . . . .
. . . A. K. S. and K. P. 2 1 6
Application of Prediction Error Filters for the Detection of Weak Teleseismic Events . . . W . 2 2 2
Towards a General Theory of Induced Electrical in Geophysical Exploration . . . 4. Waif 231 Quasi-Static Magnetic-Field Technique for Determining Position and Orientation . . . H. Raab 2 3 5
Miniature Interferometer Terminals for Earth Surveying: Ambiguity and Multipath with Global Positioning System . . . C. and A. 2 4 4
BOARD FOR . . . . 2 5 3
A. and R. M. properties of sea ice in
the 50-150 MHz range,” 84, pp. 5759, ,979.
L. Wentworth and M. Cohn, “Electrical properties of sea ice at 0.1 30 Res. NBS, vol. pp. 1964. A. W. “Geophysical exploration in polar areas with very
low frequency phase
vol. AP-16, pp. 364-365, May ,968.
J. R. Wait and D. A. Hill, “Excitation of the HF surface wave by vertical and horizontal antennas,” Radio vol. 14,
780, 1979.
I. R. Wait, “Theory of electromagnetic surface over geo-logical conductors,” 28, pp. 47-56,
1954.
D. A. and A. S. Thorndike, “Geometric properties of
the underside of sea ice,” J. vol. 85, no.
3955-3963, July 20.1980.
E. L. “Propagation of radio waves the surface of the earth,” USSR Academy of Sciences, Moscow, USSR, 1961. K. “Propagation of electromagnetic waves spherical
earth across boundaries,” Sec. no.
39-62, Jan. 1963.
David A. Hill for a photograph and biography please page 209 of this issue.
James R. Wait for a photograph and biography please see page 209 of this issue.
A Fast Optimal Deconvolution Algorithm for Real
Seismic Data Using Kalman Predictor Model
A. K. MAHALANABIS, SENIOR MEMBER, IEEE, SURENDRA PRASAD, MEMBER, IEEE, AND K. P. MOHANDAS
Abstract-The paper concerned with application of
algorithm for of stochastic dynamic lowing model for the seismic reflections to tie problem of of reflection seismograms.
Results of real data processing in order to establish the Yk advantages of this algorithm in of computational
accuracy of estimation the widely accepted
where is the noise component of the measurements
of Robinson and Treitel.
is the true reflection signal. A simple model assumed by the above named workers is
1.
HE PROBLEMS of estimating the locations of the layers and strengths of the reflection coefficients by processing real reflection seismograms have drawn wide atten-tion in the literature. One of the most successful approaches
developed by Robinson and Treitel the
where represents the reflection coefficient of the jth layer and is the weighting sequence which combines the charac-teristics of the seismic source utilised in the exploration with those of the reflecting layers.
Manuscript received November April 2, 1981. A. K. and S. are the Department of Electri-cal Institute of Technology, New Delhi
India.
K. P. is the Department of Electrical Engineering, Indian of Technology, New Delhi 110 016, India, on leave from Regional Engineering 673 601, India, the Quality Improvement Program of the Government of India.
has been shown that effective estimate of the reflection coefficient can be obtained from the prediction error of The algorithm proposed in and widely adopted in the real-life situations, is based on the following autoregressive form of the d-step predictor (d
Relation (3) implies that an estimate can be obtained by order than the AR predictor necessary to produce a
using N previous values of the measurements. The coefficients ble deconvolution accuracy. Numerical results based on real . a,, , needed to build the predictor are obtained data collected from the Institute of Petroleum Exploration,
equations Dehradun, India, presented in order to illustrate the
effec-tiveness of the new algorithm.
II. PROBLEM FORMULATION
(4) Consider the following Gauss-Markov model for representing the seismic reflections:
where is the autocorrelation coefficients of lag I, 0, and N is the order of the predictor.
More recently, Mendel has reformulated the seismic deconvolution problem using a state variable model for He has shown that the reflection coefficients can be taken as the input sequence in the Gauss-Markov model for the
and that the measurements are related to the vector through the model
=
dimension of the vector the matrix F, and the vectors and h are assumed to be known parameters of the model and the problem of estimation of the reflection coefficients is treated as that of estimating a white Gaussian input sequence. The solution proposed by Mendel makes use of the fact that though the estimates of are identically the smoothed estimates of this sequence are finite. He has also shown that the smoothed estimates of can be obtained in terms of the and smoothed estimates
The algorithm of Robinson and Treitel, unfortunately, requires prior assumptions regarding both the model structure and the number of N in the predictor (3). The pub-lished literature indicates the need to use as many as 100 to ‘ZOO terms in this series for effective real seismic data process-ing. The inclusion of such a large number of terms, in turn, increases the computational complexity. Additionally expe-rience with time series modelling and prediction
shows that better results are possible with a mixed
sive moving average type predictors. The state vari-able model of Mendel being equivalent to an model is
thus advantageous. Unfortunately, development
requires p rio ri knowledge of not only the model structure but also of the model parameters. This may make it impos-sible to process real data through this algorithm since the mea-surement of the input is not always feasible.
The aim of the present study has been to explore the pos-sibility of using a recently proposed stochastic system identifi-cation algorithm for deconvolution of real seismic data. This algorithm has the advantage of yielding the minimal order predictor model of the concerned process directly through processing of the output autocorrelation functions of
lags. It is shown that this new algorithm is also capable of reducing the computational burden significantly since the optimum Kalman predictor out to be of much lower
=
(7)
where represents a zero-mean white Gaussian vector to the in (5). It is assumed that the pair
(F, is completely observable. The recorded values of the reflection sequence are to be processed first for estimating the unknown parameters of the model before the white noise estimation can be performed. It is well known that [S] the number of unknown parameters in the assumed mode which correspond to the elements of the matrix
F the g and h, the and the variance of
are too many to be successfully identified from the records of The best that can be done is that of identifying the so called Kalman predictor model equivalent of the Gauss-Markov model which corresponds to the following pair of equations:
(9)
where represents the minimum variance predicted
esti-mate of based on , , represents the
innovations sequence, and K represents the asymptotic value of the Kalman predictor gain.
The parameters of the predictor model are the elements of the matrix F of the vectors h and K and the variance Q of the innovations sequence. The total number of unknown param-eters is reduced significantly by using F and h in the com-panion
1
a n d
The first problem to be discussed in the paper is that of identifying the predictor model (9) by processing the real seismic data. This requires the determination of the structural parameter, viz., the unknown order of the and then the estimation of the elements of F, K, and Once the model has been successfully identified, the next problem to be discussed is that of estimating the white Gaussian reflection sequence
is essentially an off-line computational problem the reflection coefficient estimation is essentially an on-line computational problem. Also this latter problem in essence requires us to record the innovation sequence which being the of prediction represents the desired estimate of
The identification algorithm exploited present investi-gation is based on the works of Mehra and Tse and The basic relation involved in the development of this algorithm is the expression for the output
tion defined by
where is the chosen lag and denotes the expectation operation. Corresponding to the predictor model it is easy to check that satisfies the following relations:
= + Q,
,
where + and P is the asymptotic value of the by
It is possible to show that P is given as the solution of the following nonlinear equations :
P = + (14)
Using (12) for , it is possible to see that the following relation holds:
In view of the complete observability of (F, it follows that the X matrix which the vector on the right-hand side of (15) is nonsingular so that an explicit expression for the vector can be obtained. The assumed canonical for and F further ensures that this matrix is in fact an identity matrix so that the vectors can be com-puted easily using the relation
(12) is now written for I + 1 and above expression for is utilized along with the Cayley-Hamilton theorem, one gets the relation be utilized successfully to determine the unknown order of the given system for which output are available. Mak-ing “se of the hypothesis, the output autocorrelation sequence is estimated using the time average
1
(19)
With L chosen sufficiently large approximates sufficiently closely. Choosing a large is not difficult in seismic data processing since a seismic trace sampled at 2 4 ms provides 2000-3000 samples.
In order to find the unknown value of the order of the Gauss-Markov model needed to tit the observed values it is necessary and sufficient to test the ranks of a set of ma-trices R(p) of increasing dimensions. If it is found that the determinants of all matrices are for , and are for > J, then the order is selected When the measured data is noisy, it is observed that the determinants of these matrices do not vanish, but the correct system order can still be found unambiguously by looking for a large fall in the determinant magnitude as discussed
After having determined the value ofn, the unknown vector is estimated from (19) with replaced by In
other words one the relation
i(n).
numerical values of the parameters evaluated by (20) are known to be sensitive to in the estimation of the correlation coefficients by (19). But this will not adversely affect the deconvolution since an effective deconvolution re-quires only a good waveshape and not necessarily accurate parameter values.
The other parameters of the model, viz., the predictor gain
K, the innovations variance Q and the state variance P can be obtained by iterating the following set of equations
= o
=
the correct values for and Q after a limited number of iterations for a stable F matrix. It may be pointed out that a similar algorithm has also been developed by Son and Ander-son [ independently.
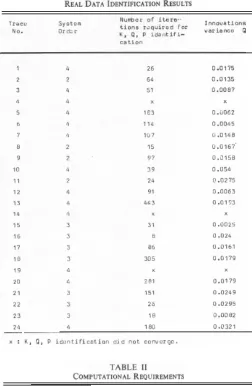
The simple identification algorithm discussed above has been tested with gain corrected real seismic data supplied by the Institute of Petroleum Exploration. A total of 500 data points each from 24 traces of a marine seismic section have been pro-cessed. It has been observed that the system order determined differs from trace to trace, but in most of the cases the system order for getting good results for deconvolution was less than
Table I gives a summary of the results of identification. It should be mentioned that the predictor gain and the innova-tions variance did not converge to steady values within a rea-sonable number of iterations for three traces. This appears to be due to the poor signal quality of these traces and implies that the present method is not guaranteed to work in situations.
IV. RESULTS OF
The identified models of Table I have been for de-convolution of the actual seismic section. As mentioned earlier, the deconvolution philosophy of Robinson and Treitel [I], extended to the predictor formulation gives the innovations as the deconvolved output. Of course, the prediction error in state variable form has also been dis-cussed by Ott and but their formulation is not in a form suitable for application to real seismic data processing. It may also be pointed out that has shown that this can be very bad at low
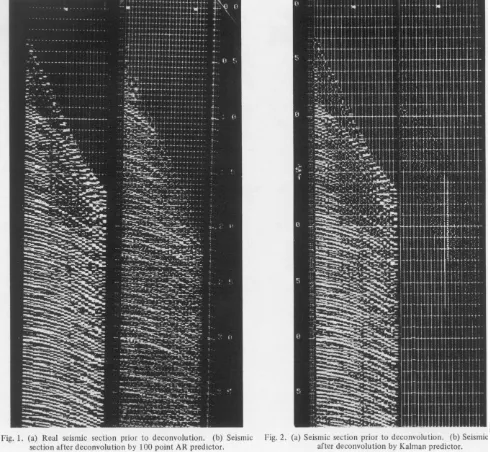
The results of processing of data are shown Figs. 1 and 2. Since there is no question of knowing the actual values of the reflection coefficients, this case, the best that can be done is to compare the results obtained using the proposed algorithm with those of the popular algorithm of Robinson and Treitel. Fig. l(a) shows the 24 traces plotted after applying gain correction alone and before applying correction. Fig. l(b) shows the deconvolved output of the classical pre-diction error of Robinson and Treitel making use of a predictor of order And Figs. 2(a) and (b) the plots of the input data and the output of the newly proposed volution algorithm. It is clear that the events of interest have been made very clear in Fig. compared to Figs. I(a) or
Coming, next, to the computational requirements, a compar-ison of the two algorithms cannot be based on “operations count.” This is so because the number of iterations required for identifying the model in the proposed method is partially dependent on the data quality. An overall comparison can: however, be made on the actual CPU time on a given system. Table II the time required to process 1000 samples each of 48 traces constituting a seismic section on an
system. It is clear that the method proposed here is about thrice as fast as the Robinson and Treitel method.
As a further check on the superiority of the predic-tor the 100 term AR predictor, whiteness tests on the residuals (i.e., the deconvolved output) have been per-formed. Figs, 3(a) and (b) show typical plots of the
relation functions of the residual for one of the traces as ob-tained respectively from the AR and the predictors. The predictor is seen to yield a nearly white residual than the term AR predictor.
V. REMARKS
It has been demonstrated that an optimum asymptotic man predictor can be identified using the available output data of a seismic experiment. This can be used to estimate the white Gaussian reflection coefficients of the seismogram
by (5) and (6). The main advantages of the pro-posed algorithm are its applicability to real data and the com-parative computational ease in identifying the best possible model. These advantages are easily verified looking at the results of real data processing presented in Tables I and II and in Figs. and 3.
FOR REAL DATA
to be equivalent to the problem of estimation of the white noise sequence in (5). It should be possible to obtain the smoothed estimates of this sequence if the unknown parameters of the model (5)-(6) are known The system identification method discussed in the present paper yields the optimal estimates of the matrices F and h in the canonical form. It should be possible to use estimates along with
an adaptive algorithm in order to obtain
the of and variance of This would then
permit the results of the present paper to be extended to cover the noise estimation problem.
Further, Mendel and have shown that the
uncertainty associated with the reflection from bearing structures can be accounted for by using where is a binary sequence can take values zero one and is a Gaussian sequence. It has been shown that combined detection estimation algorithm using the maximum likelihood approach can be for estimating in such cases. The possibility of extending the method of present paper to the detection estimation situation is also being investigated.
ACKNOWLEDGMENT
The would like to record their appreciation of help received from Dr. V. C. and Dr. N. D. J. Rao of the Institute of Petroleum Exploration, Dun in the form of the data used work and in the form of valuable
and computational facilities. Also the authors wish to acknowledge the useful comments of the anonymous reviewers on the original version of paper.
REFERENCES
E. A. Robinson, “Predictive decomposition of seismic traces,”
22, Oct.
K. L. Peacock and “Predictive
34, no. 2, 155-167, Apr. 1969.
1. Mendel, Noise Estimators for seismic data
Process-ing oil Trans. vol. K-22,
pp. 694-707, Oct. 1971.
John and Mendel, “On maximum likelihood esti-mation of reflection coefficients,” in
(San Francisco, CA).
E. Tse and 1. Anton, “Identifiability of parameters,”
Automat. vol. AC-17, Pp. 637-646, Oct. 1972. R. K. “On identification of dynamic systems,‘*
IEEE AC-16, Pp. 12-21, Feb. 1971.
E. Tse and H. “Structure determination and parameter identification of systems,” IEEE
vol. AC-20, pp. 1975.
San Francisco, CA: Day, 1976. R. L. Kashyap and A. R. “Dynamic stochastic models from
empirical data,” New York: Academic Press, 1976.
M. Mendel, “A quantitative evaluation of Ott and pre-diction error filter,” vol. 25, no. 4, pp. L. H. Son and B. D. 0. Anderson, “Design of filters using signal model output statistics,” vol. 120, no. 312-318, Feb. 1973.
A. K. born in
Bangladesh 1934 and has educated in the University of Calcutta, India, where he received the degree in 1961. development group automation His research interests are mainly the area of Stochastic Estimation and Control with Applications in and Identification of Physical Systems from real data.
a member of the Editorial Board of the Journal
and and is the
Chair-man of the International Programme Committee of the IFAC Sym-posium on Theory and Applications of Digital Control to be held in New Delhi in January 1982.
was born New Delhi, India, on 10, 1948. He received the degree in electronics and electrical
engineering from the Institute of Technology
India, in 1969, and the Ph.D.
electrical engineering from the New Delhi, India, in 1971 and 1974, respectively.
He has been teaching at LLT., New Delhi. August 1971, presently an Assistant Professor. His teaching and research interests are in radar/ sonar signal processing, communications, and computers. He was a Visiting Research Fellow at the Loughborough University of Technol-ogy, during the period from 1976 to August 1977 where he was in developing algorithms for adaptive array processing for H.F. arrays. he is engaged research in the areas of sonar and seismic signal processing, underwater communications and
signal processing.
P. was born in
State, 1946 and received the
degree from Kerala University
1968 and degree from the
Institute of Technology, Madras, 1973, both