MODUL PERKULIAHAN
Mesin Arus
Searah dan
Transformat
or
Komutasi dan Reaksi
Jangkar
Fakultas Program Studi Tatap Muka Kode MK Disusun Oleh
Fakultas Teknik Teknik Elektro
dan masalah-masalah yang
mengiringinya yang muncul akibat proses komutasiMahasiswa mampu menjelaskan masalah-masalah yang muncul akibat reaksi jangkar
Tegangan Dalam Mesin DC
Pembentukan Tegangan Dalam
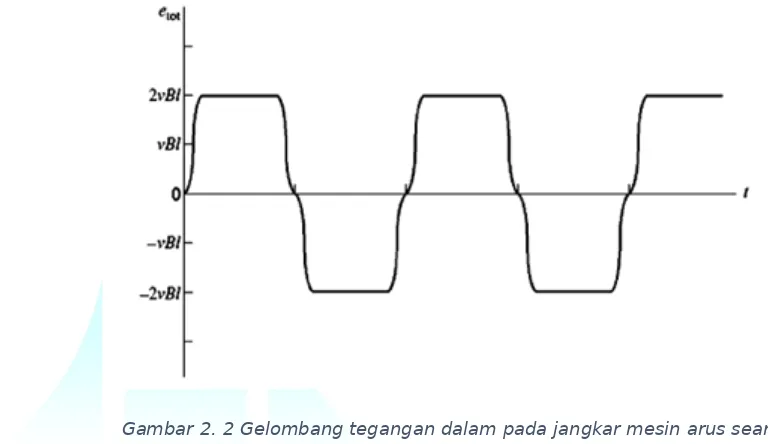
Sebagaimana mesin berputar lainnya, tegangan yang terinduksi pada jangkar sebuah MAS
(tegangan dalam, EA ) adalah tegangan bolak-balik (AC)
Contoh: mesin arus searah sederhana 2 kutub untuk setiap satu lilitan jangkarnya akan mendapatkan tegangan AC yg nilai maksimumnya 2vBl
v = kecepatan linier
B
= kerapatan fluks magnet l = panjang lilitanGambar 2. 1 Mesin arus searah sederhana dengan dua kutub
Tegangan yang dihasilkan pada tiap segmen lilitan di depan kutub adalah
vBl
. Dengan demikian maka total tegangan yang dibangkitkan pada satu lilitan jangkar adalah 2vBl . Setiap lilitan berputar 1800 mekanik, tegangan berbalik polaritasnya sehingga teganganKomutasi
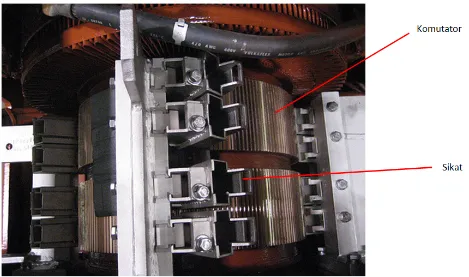
Komutasi adalah proses membalik/menukar hubungan lilitan pada rotor dari mesin arus searah persis ketika tegangan pada lilitan berubah polaritas untuk mendapatkan tegangan yang tetap polaritasnya (tegangan dc). Proses komutasi ini dilakukan oleh sistem penyearah tegangan yang terdiri dari komutator dan sikat (brush). Gambar 2.3 memperlihatkan proses komutasi dengan komutator dan sikat. Seperti yang dapat dilihat pada gambar 2.3.a, komutator terhubung dan berputar bersama-sama dengan belitan jangkar, sementara sikat tetap diam pada posisi tertentu. Sikat selalu terhubung dengan segmen-segmen komutator meskipun komutator berputar. Posisi sikat ditempatkan sedemikian rupa sehingga ketika tegangan belitan jangkar berbalik polaritas, sikat terhubung dengan segmen komutator yang memiliki polaritas yang tetap. Sebagai contoh, pada gambar 2.3.a sikat di depan kutub utara akan selalu terhubung dengan komutator yang bertegangan positip sedangkan sikat di depan kutub selatan akan selalu terhubung dengan komutator yang bertegangan negatip. Dengan demikian maka tegangan terminal mesin arus searah akan berupa tegangan arus searah sebagaimana diperlihatkan pada gambar 2.3.b.
Gambar 2. 4 Komutator dan sikat pada mesin DC sesungguhnya
Masalah-masalah Yang Menyertai
Komutasi
Dalam kenyataannya proses komutasi tidak sesederhana apa yang digambarkan pada bagian sebelumnya. Ada dua masalah utama yang muncul berkenaan dengan proses
komutasi. Yang pertama adalah reaksi jangkar dan yang kedua adalah tegangan
L
di
dt
.Reaksi Jangkar
beban, semakin besar arus jangkar, semakin besar pula distorsi yang ditimbulkannya pada medan magnet utama.
Distorsi akibat reaksi jangkar pada mesin arus searah ada dua macam yaitu pergeseran bidang netral magnet dan pelemahan fluks (flux weakening).
Pergeseran Bidang Netral Magnet
Yang dimaksud dengan bidang netral magnet (sumbu magnet) adalah suatu bidang maya (khayal) pada mana kecepatan penghantar rotor paralel dgn garis fluks magnet sehingga tidak terjadi perpotongan antara medan magnet dengan penghantar rotor yang berada tepat di bidang ini. Akibatnya tegangannya yang dibangkitkan pada penghantar ini nol.
Ketika terjadi reaksi jangkar, distribusi (kerapatan) fluks magnet pada mesin akan berubah sehingga bidang netral magnet bergeser. Untuk generator, pergeseran bidang netral magnet searah dengan arah putaran rotor. Sedangkan untuk motor, pergeseran bidang netral magnet berlawanan arah dengan arah putaran rotor. Besar pergeseran tergantung besar arus jangkar (beban). Untuk lebih jelas memahami pergeseran bidang netral magnet ini perhatikan gambar 2.5.
bergeser ke arah penambahan kerapatan searah dengan putaran rotor sebagaimana diperlihatkan pada gambar 2.5.e.
Gambar 2. 5 Pergeeran bidang netral magnet akibat reaksi jangkar
Pelemahan Fluks
Sebagaimana dijelaskan pada gambar 2.5.d dan 2.5.e, reaksi jangkar menimbulkan peningkatan sekaligus pelemahan GGM di depan kutub mesin, dengan besar yang sama. Namun karena mesin beroperasi di dekat titik jenuh (daerah lutut, knee area), maka pelemahan fluks yang terjadi akibat pelemahan GGM akan lebih besar dari peningkatan fluks akibat peningkatan GGM. Sehingga, secara keseluruhan fluks pada mesin mengalami penurunan. Hal ini diperlihatkan pada gambar 2.6.
Gambar 2. 6 Pelemahan fluks (flux weakening)