ANALISA SISTEM KEMUDI PROTOTIPE GUIDED BUS
Auzi Faiz Bahtiara, Rifky Ismaila, Adhitya Pamungkasb aJurusan Teknik Mesin, Fakultas Teknik, Universitas Diponegoro
Jl. Prof. Sudharto, Semarang bPT. Safta Ferti Bandung
Jalan Dirgantara I, Gempolsari, Bandung, Jawa Barat, Indonesia *E-mail: [email protected]
ABSTRAK
Perkembangan riset dan pembuatan prototipe mobil listrik di Indonesia sudah berlangsung sepanjang tahun 2000. Pada 1997-2005 LIPI membuat beberapa mobil listrik untuk fungsi khusus yang diberi nama Marlip. Di 2009, LIPI menghasilkan satu mobil hasil konversi dari mobil berbahan bakar minyak menjadi mobil bertenaga listrik dalam wujud Toyota Kijang lawas. Kemudian ada 2010, LIPI membuat prototipe konsep mobil listrik sport SKEV 1 dan SV-1. Akhir 2011, LIPI berhasil membuat prototipe mobil bus listrik angkutan penumpang. Pada 2012 hingga 2013 LIPI menghasilkan tiga prototipe riset, yaitu mobil bus listrik tipe eksekutif, sedan listrik, dan mobil hybrid generasi 2. Prototipe riset LIPI ini diberi nama Hevina (Hybrid and Electric Vehicle
Indonesia), dan saat ini LIPI sedang mengembangkan prototipe Guided Bus (Mobil tanpa Awak).
Guided arm adalah salah satu komponen penting dari guided bus guided bus yang perlu dianalisa. Bila tidak tepat dalam perencanaan, desain, material dan pemasangan komponen pada prototype Guidedbus dapat terjadi ketidaksesuaian yang berdampak kecil atau bahkan besar, sebagai contohnya terjadinya patahan yang menyebabkan kecelakaan. Pada penelitian ini, metode pendekatan yang digunakan adalah menggunakan pendekatan metode analitik dan analisa perangkat lunak SolidWorks untuk mencari besarnya defleksi yang terjadi pada Guided Arm. Adapun hasil yang diperoleh dari penelitian ini adalah besarnya defleksi yang terjadi ketika guided bus membelok dipengaruhi oleh beberapa faktor, diantaranya radius belok, kecepatan maksimal guided bus, serta gaya sentrifugal sebagai gaya aksi roller pada guided arm dengan jalur lintasannya.
Kata kunci: Mobil listrik, sistem kemudi, defleksi
1. PENDAHULUAN
Pada akhir tahun 2014, pemerintah menarik subsidi yang diberikan untuk bahan bakar hal ini dikarenakan kurangnya optimalisasi dari penggunaan subsidi tersebut, dilain sisi jumlah kendaraan baik roda dua maupun roda empat semakin menigkat dari tahun ke tahun sehingga penggunaan bahan bakar pun semakin meningkat, hal ini tidak diimbangi dengan jumlah cadangan bahan bakar yang dimiliki oleh Indonesia oleh karena itu perlu sebuah solusi utuk mengatasi masalah tersebut salah satunya adalah perancangan mobil listrik.
Perkembangan riset dan pembuatan prototipe mobil listrik di Indonesia sudah berlangsung sepanjang tahun 2000. Pada 1997-2005 LIPI membuat beberapa mobil listrik untuk fungsi khusus yang diberi nama Marlip. Di 2009, LIPI menghasilkan satu mobil hasil konversi dari mobil berbahan bakar minyak menjadi mobil bertenaga listrik dalam wujud Toyota Kijang lawas. Kemudian ada 2010, LIPI membuat prototipe konsep mobil listrik sport SKEV 1 dan SV-1. Akhir 2011, LIPI berhasil membuat prototipe mobil bus listrik angkutan penumpang. Pada 2012 hingga 2013 LIPI menghasilkan tiga prototipe riset, yaitu mobil bus listrik tipe eksekutif, sedan listrik, dan mobil hybrid generasi 2. Prototipe riset LIPI ini diberi nama Hevina (Hybrid and Electric Vehicle Indonesia), dan saat ini LIPI sedang mengembangkan prototipe Guided Bus (Mobil tanpa Awak). Guided vehicle atau guided bus merupakan kendaraan yang beroperasi pada jalur yang tetap dan terarah, seperti halnya kendaraan yang beroperasi diatas rel. Berbeda dengan Non-guided vehicle, yaitu kendaraan yang dapat bergerak secara bebas pada arah yang bervariasi seperti halnya pada jalan raya.
2. MATERIAL DAN METODOLOGI
Pada perancangan sistem kemudi prototipe Guided Bus terdiri dari beberapa bagian berupa sistem penggerak yang berfungsi untuk menggerakkan Guided Bus, baterai dan sistem pengisiannya yang berfungsi sebagai pemasok daya untuk Guided Bus dan sistem kemudi elektronik berupa EMS (Electric Management System) yang berfungsi untuk mengatur kontrol kelistrikan dari prototipe guided bus baik berupa sensor pengisian beterai, sensor gerak dan lain sebagainya.
Dalam melakukan perancangan prototipe guided bus, terlebih dahulu dilakukan analisa pemilihan material baik yang digunakan untuk perancangan rangka guided bus maupun untuk perancangan guided arm. Hal ini dikarenakan bila tidak tepat dalam perencanaan materialnya maka dapat terjadi ketidaksesuaian yang berdampak kecil atau bahkan besar, sebagai contohnya terjadinya patahan yang menyebabkan kecelakaan ketika guided bus itu digunakan.
Adapun material yang digunakan dalam pembuatan guided bus adalah menggunakan cast carbon steel. Material ini dipilih karena memiliki modulus elastis yang besar sesuai dengan table 2.1 yang ada dibawah ini sesuai dengan ASTM A105.
Tabel 2.1 Sifat material untukcast carbon steel. [1]
Elastic Modulus 2 x 1011 N/m2
Poissons Ratio 0.32 N/A
Shear Modulus 7.6x1010 N/m2
Density 7800 kg/m3
Tensile Strength 482549000 N/m2
Yield Strength 248168000 N/m2
Thermal Expansion Coefficient 1.2x10-5 /K
Thermal Conductivity 30 W/(m·K)
Specific Heat 500 J/(kg·K)
Berbeda dengan mobil pada umumnya, dalam perancangan sistem kemudi pada guided bus digunakan empat buah
guided arm yang masing-masing dilengkapi dengan roller untuk membelokkan roda sehingga guided bus dapat
membelok sesuai dengan jalur yang ada pada lintasan seperti pada gambar 2.1.
Gambar 2.1 Perancangan rangka guided bus dan sistem kemudinya [2]
Adapun material yang digunakan dalam perangcangan guided arm yaitu berupa cast carbon steel. Material ini dipilih karena memiliki modulus elastis yang besar sesuai dengan table 2.1 berdasarkan dengan ASTM A105. Sedangkan dalam perancangan roller yang digunakan dalam sistem kemudi guided bus untuk membelok yaitu menggunakan material karet. Material ini dipilih karena material tersebut dapat menahan beban ketika guided bus membelok, sehingga dapat meredam tegangan yang terjadi ketika guided bus melakukan kontak dengan jalur lintasan ketika membelok.
Berikut merupakan spesifikasi material Hard Nylon(rubber) yang digunakan untuk pembuatan roller sesuai tabel 2.2. Data ini diambil dari dokumen ASM F15 :
Tabel 2.2 Sifat material untukHard Nylon.[1]
Jenis material Hard Nylon
Elastic modulus 1000000000 N/m2
Mass density 1150 kg/m3
Tensile strength 79289709 N/m2
Yield strength 60000000 N/m2
Thermal expansion coefficient 1x10-6 /k
Thermal conductivity 0.53 W/(m.K)
Specific heat 1500 J/(Kg.K)
Gambar 2.2 merupakan dimensi geometri guided arm yang dirancang pada guided bus untuk membelok yang dilengkapi dengan roller pada masing-masing sisi.
Gambar 2.2 Dimensi Guided Arm [2]
Bagian-Bagian Sistem Kemudi
Sistem kemudi pada prototipe guided bus dirancang degan menggunakan gabungan bagian-bagian mobil seperti pada tabel 2.3 di bawah ini. Dimana sebagian besar part yang digunakan diambil dari part mobil carry futura. Hal ini disebabkan karena pada umumnya dalam perancangan guided bus ini model yang digunakan adalah mobil carry futura baik body mobil, rangka mupun sistem kemudinya, sehingga bagian-bagian yang digunakan pun banyak yang diadopsi dari mobil carry futura. Tabel 2.3 menunjukkan data bagian-bagian yang digunakan dalam perancangan system kemudi guided bus. Data ini diambil dari rancangan Prototype Guided Bus (Mobil Listrik Kendali Elektrik atau Tanpa Sopir) di PT. Safta Ferti Bandung :
Tabel 2.3 Bagain-bagian sistem kemudi
Absorber Mobil carry Futura
Kin pin Mobil Katana
Ball joint Mobil carry Futura
Tie rod Mobil carry Futura
Gardan Mobil carry Futura
Spesifikasi Motor yang digunakan
Dalam perancangan prototipe guided bus digunkan motor penggerak dengan besar torsi 60 N.m dan daya sebesar 2000 cc yang selanjutnya diteruskan ke gardan untuk menggerakan roda sehingga dapat bergerak maju dan bergerak mundur. Motor yang digunakan dalam perancangan ini berjumlah satu buah yang diletakkan pada sisi belakang guided bus. Tabel 2.5 menunjukkan spesifikasi teknis motor penggerak yang digunakan sesuai tabel 2.5. Data ini diambil dari PT. PINDAD Bandung
Tabel 2.5 Spesifikasi Motor yang Digunakan
Jenis Motor Motor 2 Fasa
Torsi 60 N.m
Daya 750 kW (2000 cc)
Efisiensi 94 %
Spesifikasi Baterai yang digunakan
Tabel 2.6 Spesifikasi Baterai yang Digunakan
Jenis Baterai Lithium Polymer (LiPo)
Tegangan 48 Volt
Berat 100 kg
Dimensi 1154x286,3x286 mm
3. HASIL DAN PEMBAHASAN
Penggunaan Guided Arm pada prototipe Guided Bus merupakan salah satu hal yang perlu dianalisa dari sekian banyak komponen Guided Bus untuk mengetahui besarnya defleksi atau lendutan akibat pembebanan. Hal ini dilakukan karena apabila tidak tepat dalam perencanaan, desain, material dan pemasangan komponen pada prototipe Guided bus dapat terjadi ketidaksesuaian yang berdampak kecil atau bahkan besar, sebagai contohnya terjadinya patahan yang menyebabkan kecelakaan.
Pada penelitian ini, analisa dilakukan pada lengan guided arm ketika menerima beban pada saat membelok dengan menggunakan perhitungan numerik dan analisa perangkat lunak SolidWorks untu mensimulasikan defleksi pada
guided arm.
3.1 Analisa Kinematika
a. Analisa Kecepatan Kendaraan
Pada saat mobil melaju pada sebuah tikungan, maka mobil akan melakukan gerak melingkar. Hal itu menyebabkan timbulnya gaya sentrifugal yang arahnya keluar tikungan yang besarnya sama dengan gaya sentripetal dan selalu menuju pusat kelengkungan sehingga mobil tidak tergelincir. Dalam hal ini, gaya sentripetal yang arahnya menuju pusat kelengkungan diwakili oleh gaya gesekan roda yang melawan gaya sentrifugal mobil. Sesuai dengan Hukum II Newton bahwa gaya sentrifugal akan menyebabkan percepatan sentrifugal. Pada saat menikung, kecepatan mobil tidak boleh terlalu tinggi karena akan menghasilkan gaya sentrifugal yang besar. Batas kecepatan mobil terjadi saat besarnya gaya sentrifugal sama dengan gaya gesekan maksimum mobil terhadap jalan yang arahnya berlawanan dengan gaya sentrifugal.
Fc = ��
μs = Koefisien tertinggi untuk jalan aspal, beton kering 0,8 [3]
Pada perhitungan analisa kecapatan maksimal ini menggunakan variasi radius untuk mengetahui perbedaan besarnya kecapatan maksimal sesuai dengan radius beloknya. Adapaun variasi radius yang digunakan dalam perhitungan analisa ini adalah 10m, 20m, 30m dan 40 m. Hal ini dimaksudkan untuk mengetahui pengaruh radius belok terhadap besarnya kecepatan maksimal.
• Variasi radius belok 10 meter
v = �µ . Rn. g v = �0,8 x 10 x 9,8 v = 8,85 �/� v = 31,89 ��/��� • Variasi radius belok 20 meter
v = �µ . Rn. g v = �0,8 x 20 x 9,8 v = 12,52 �/� v = 45,10 ��/��� • Variasi radius belok 30 meter
• Variasi radius belok 40 meter
v = �µ . Rn. g v = �0,8 x 40 x 9,8 v = 17,71 �/� v = 63,78 ��/���
Tabel 3.1 Pengaruh Radius Belok terhadap Kecepatan Radius Belok
Guided Bus
Kecepatan
m/s Km/jam
10 meter 8,85 31,89
20 meter 12,52 45,10
30 meter 15,34 55,23
40 meter 17,71 63,78
Dari tabel 3.1 dapat disimpulkan bahwa radius dapat mempengaruhi besarnya kecepatan maksimal guided
bus, dimana hubungan antara radius berbanding lurus sehingga semakin besar radius maka kecepatan maksimal
yang diijinkan supaya tidak mengalami slip atau skid juga semakin besar.adapun besarnya kecepatan rata-rata dengan variasi radius 10m, 20m, 30m dan 40 m adalah 49 km/jam.
3.2 Analisa Dinamika Kendaraan
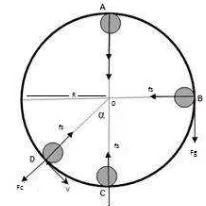
Gaya Sentrifugal merupakan gaya yang diberikan oleh guided bus ketika membelok, dimana besarnya gaya sentrifugal berlawanan arah dengan gaya sentripetal yang arahnya menuju pusat radius belokan seperti pada gambar 3.1 di bawah ini.
Gambar 3.1 Diagram benda bebas ketika guided bus membelok
Adapun besarnya gaya sentrifugal dapat dihitung dengan menggunakan rumus
Fc = �.�
2 �.��
Dimana : v = Kecepatan kendaraan (m/s) g = Gaya grafitasi bumi (ms2) Rn = Radius belok nyata
W = Berat maksimal kendaraan (berat kendaraan + berat penumpang). [3]
Untuk mengetahui pengaruh kecepatan dan radius belokan maka dalam perhitungan analisa dinamika kendaraan digunakan variasi radius 10m, 20m, 30m, dan 40m dengan masing-masing kecepatan maksimalnya dengan besar beban yang diberikan sebesar 13000 N dengan rincian asumsi jumlah sembilan orang penumpang dengan berat masing-masing 80 Kg dan berat rangka bodi sebesar 580 Kg.
• Variasi radius 10 meter, dengan kecepatan maksimal 8,85 m/s
Fc = �.�
2 �.��
Fc = (13000) � 8,85
2
M
PL
P
V
• Variasi radius 20 meter, dengan kecepatan maksimal 12,52 m/s
Fc = �.�
• Variasi radius 30 meter, dengan kecepatan maksimal 15,34 m/s
Fc = �.�
• Variasi radius 40 meter, dengan kecepatan maksimal 17,71 m/s
Fc = �.�
Tabel 3.2 Pengaruh Radius Belok dan Kecepatan terhadap Gaya Sentrifugal
Radius Belok Kecepatan maksimal Gaya Sentrifugal
10 meter 8,5 m/s 10181,92 N
20 meter 12,25 m/s 10188,77 N
30 meter 15,34 m/s 10197 N
40 meter 17,71 m/s 10193 N
Rata-rata 13,45 m/s 10190,17 N
Dari tabel 3.2 di atas dapat disimpulkan bahwa radius dan kecepatan maksimal dapat mempengaruhi gaya sentrifugal yang terjadi pada guided bus ketika membelok, dimana hubungan antara radius berbanding terbalik dengan gaya sentrifugal sehingga semakin besar radius maka besarnya gaya sentrifugal yang terjadi semakin kecil, begitu pun sebaliknya semakin kecil radius beloknya maka besarnya gaya sentrifugal yang terjadi ketika membelok semakin besar.
3.3 Analisa Defleksi
Defleksi merupakan kondisi ketidakstabilan yang mengarah ke modus kegagalan. Secara teoritis, defleksi disebabkan oleh bifurkasi dalam solusi untuk persamaan keseimbangan statis. Adapun definisi lain mengenai defleksi adalah suatu proses dimana suatu struktur tidak mampu mempertahankan bentuk aslinya. Konsekuensi defleksi pada dasarnya adalah masalah geometrik dasar, dimana terjadi lendutan besar sehingga akan mengubah bentuk struktur. [4]
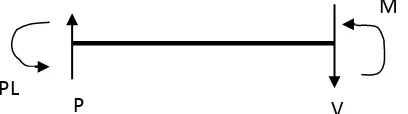
Gambar 3.1 Diagram benda bebas pada guided arm
• Momen yang terjadi pada batang
Σ�= 0 �+��= 0 �=−��
• Menentukan besarnya defleksi dengan menggunakan metod energi
�=1
Dengan mensubtitusikan nilai U ke dalam persamaan sebelumnya, maka didapatkan
��
Pada perhitungan analisa defleksi yang terjadi pada guided arm digunakan variasi radius dan kecepatan dimana diaman keduanya tersebut juga mempunyai pengaruh terhadap gaya sentrifugal yang nantinya akan digunakan sebagai beban yang diberikan kepada guided arm.
�=�ℎ
Dari tabel 4.1 didapatkan nilai modulus elastis untuk spesimen cast carbon steel sebesar 2x1011 N/m2 = 2038736 kg/cm2dengan panjang sebesar 453,7 mm=45,37cm.[7]
• Variasi radius 10 meter, dengan beban sebesar 10181,92 N
���� =��
• Variasi radius 20 meter, dengan beban sebesar 10188,77 N
���� =
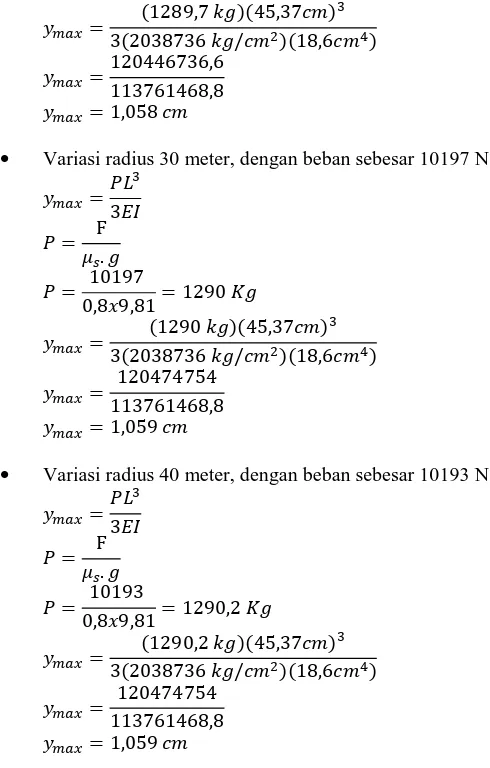
• Variasi radius 30 meter, dengan beban sebesar 10197 N
���� =��
• Variasi radius 40 meter, dengan beban sebesar 10193 N
���� =��
Tabel 3.2 Pengaruh Radius Belok dan Kecepatan terhadap Gaya Sentrifugal
Radius Belok Kecepatan Maksimal Gaya Sentrifugal Defleksi
10 meter 8,5 m/s 10181,92 N 1,057 cm
20 meter 12,25 m/s 10188,77 N 1,058 cm
30 meter 15,34 m/s 10197 N 1,059 cm
40 meter 17,71 m/s 10193 N 1,059 cm
Rata-rata 13,45 m/s 10190,17 N 1,058 cm
Dari perhitungan di atas dapat disimpulkan bahwa besarnya defleksi yang terjadi pada guided bus ketika membelok dipengaruhi oleh beberapa faktor yaitu radius belok, kecepatan maksimal serta besarnya gaya sentifugal yang terjadi, dimana hubungan antara radius belok berbanding terbalik dengan defleksi sehingga semakin besar radius belok maka besarnya defleksi yang terjadi semakin kecil, begitu pun sebaliknya semakin kecil radius beloknya maka defleski yang terjadi ketika membelok semakin besar. Adapun hubungan antara kecepatan dengan defleksi adalah berbanding lurus, sehingga semakin besar kecepatan maka besarnya defleksi yang terjadi semakin besar pula, begitu pun sebaliknya. Begitupun dengan hubungan antara gaya sentrifugal dengan defleksi yaitu berbanding lurus, sehingga semakin besar gaya sentrifugal maka besarnya defleksi yang terjadi semakin besar pula.
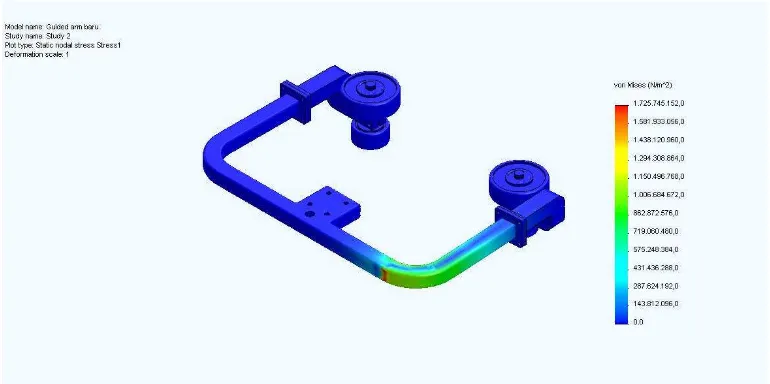
Gambar 4.3 Analisa Von Mises dengan perangkat lunak SolidWorks
3.5 Safety Factor
Safety factor adalah nilai pada sistem jika pada suatu keadaan sistem tersebut menerima beban diluar dari
perhitungan. Tujuannya agar design kita tidak failed (gagal) pada keadaan tersebut. Agar keamanan dapat tercapai, maka design load atau beban yang terjadi tidak boleh lebih besar daripada batas beban dari material.Artinya, nilai dari safety factor ini harus lebih besar daripada 1 (satu).Secara rumus safety factor dinyatakan sebagai berikut Diketahui:
Von Mises Stress : 1725,74 MPa Yield Strenght : 2480,17 MPa Jawab:
Factor of Safety = �����������ℎ� �������������s
=
2480,17
1725,74
= 1.437
Dari perhitungan diatas dapat disimpulkan bahwa perancangan sisten guided arm cukup baik karena aman digunakan dan memiliki faktor keamanan >1.
4. KESIMPULAN
a) Berdasarkan hasil perhitungan yang telah dilakukan besarnya defleksi yang terjadi ketika guided bus membelok dipengaruhi oleh beberapa faktor, diantaranya radius belok, kecepatan maksimal guided bus, serta gaya sentrifugal sebagai gaya aksi roller pada guided arm dengan jalur lintasannya.
b) Pemilihan material cast carbon steel dengan nilai modulus elastis sebesar 2 x 1011 N/m2 sudah cukup tepat karena bisa menahan beban pada guided arm ketika membelok pada kecepatan maksimal, sehingga tidak terjadi ketidaksesuaian yang berdampak kecil atau bahkan besar, sebagai contohnya terjadinya patahan yang menyebabkan kecelakaan.[7]
c) Selain dari pemilihan materialnya, guided arm juga dirancang dengan roller yang terbuat dari hard nylon dimana memiliki modulus elastis sebesar 1000000000 N/m2 sehingga dapat meredam tegangan yang terjadi ketika mengalami kontak dengan jalur lintasan.[7]
d)
Nilai faktor keamanan pada perancangan guided bus >1, hal ini dapat disimpulkan bahwa sistem kemudi yang digunakan pada prototipe guided bus ini sudah aman untuk digunakan.
5. REFERENSI
[1] Khurmi, R.S. Strenght Of Materials.S. Chand & Company Ltd. New Delhi. 2001. [2] Engineering design departement, PT. Safta Ferti Bandung, 2014
[3] Gillespie, T.D.,1992, Fundamentals of Vehicle Dynamics, Society of Automotive Engineers, Inc.
[4] Spiegel, Leonard, George F. Limbrunner, Applied Statics And Strength Of Materials.2nd edition. Merrill Publishing Company. New York. 1994.
[6] Singer, Ferdinand L. Kekuatan Bahan.Terjemahan Darwin Sebayang. Penerbit Erlangga. Jakarta. 1995.
![Gambar 2.1 Perancangan rangka guided bus dan sistem kemudinya [2]](https://thumb-ap.123doks.com/thumbv2/123dok/3357406.1756482/2.595.195.408.417.568/gambar-perancangan-rangka-guided-bus-sistem-kemudinya.webp)
![Gambar 2.2 Dimensi Guided Arm [2]](https://thumb-ap.123doks.com/thumbv2/123dok/3357406.1756482/3.595.71.507.466.527/gambar-dimensi-guided-arm.webp)