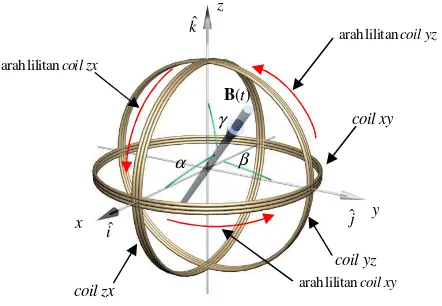
Detektor Medan Magnet Tiga-Sumbu (Octavianus P. Hulu, Agus Purwanto, Sumarna)..
Teks penuh
Gambar
Dokumen terkait
Judul Tesis : HUBUNGAN SOSIAL EKONOMI DAN INTAKE ZAT GIZI DENGAN TINGGI BADAN ANAK BARU MASUK SEKOLAH (TBABS) PADA DAERAH ENDEMIS GAKY DI KECAMATAN PARBULUAN
6. Informed consent yang sudah di tanda tangani oleh pasien atau keluarga pasien disimpan dalam rekam medic.. Bila informed consent yang diberikan oleh pihak lain atau pihak ke
Potongan Pajak No Nama Proyek Nilai Kontrak Jenis Pembayaran Tgl Pembayaran Nilai Pembayaran Jumlah SP2D Uraian Nilai SP2D... PEREDARAN
Sehingga adanya IRMUS ini memudahkan kita para orang tua untuk mengontrol, kita ajak mereka ikut kegiatan keagamaan seperti Pengajian, Takziyah jika ada orang Muslim yang
Karakteristik LED yang dapat diamati dengan I-V meter diantaranya perubahan arus terhadap tegangan, energi Band Gap, tegangan Threshold, maupun panjang gelombang cahaya yang
Hasil penelitian ini menunjukkan bahwa komitmen keluarga yang tinggi pada bisnis akan memperkuat pengaruh positif dari pengalaman positif manajer/pemilik
Pada sidang pertama jika kedua belah pihak hadir maka pengadilan berusaha mendamaikan mereka, jika berhasil perkara.. diakhiri dengan perdamaian yang dituangkan dalam akta perdamaian
2) Keadilan (equity), yaitu dasar pajak dan kriteria pemungutannya harus jelas dan tidak sewenang – wenang. Pajak harus adil seara horizontal yang artinya beban pajak
