4
BAB II
TINJAUAN PUSTAKA
2.1 Landasan Pustaka
Dalam penelitian ini parameter sistem kendaraan yang dapat diukur hanya konstanta pegas, massa kendaraan dan center of gravity dan jarak kendaraan dari titik-titik pusat setiap penggandengan, nilai-nilai redaman diambil dengan mengasumsikan lamda (λ) sebesar 0.05 dan melakukan pengkalian dengan matriks konstanta pegas. Dasar teori yang digunakan dalam memecahkan permasalahan adalah prinsip d’alembert, teori support motion, analisis modus getar dan metode runge kutta.
Dalam penelitian tentang analisis respon dinamis ini penggambaran fisik diambil dari motor aerox 155 versi S setelah itu dilakukan penggambaran model menggunakan metode newton d’alembert dimana dalam pemodelan digambar parameter konstanta pegas, konstanta redaman, massa sekaligus dengan tiga penggandengan yaitu penggandengan statik, dinamik dan statik dinamik. Dari setiap penggandengan diturunkan persamaan diferensial gerak berupa matriks massa, redaman, dan konstanta yang dalam hal ini berbentuk matriks menggunakan teori support motion. Dari bentuk matriks analisis modus getar digunakan untuk mendekopel menjadi satu dof (SDOF), nilai akhir persamaan diferensial gerak menjadi emanansi utama dalam mencari respon dinamis (respon posisi) yang nantinya dianalisis dengan metode runge kutta dalam software matlab.
Metode dalam mencari respon dinamis Yamaha aerox 155 VVA versi S ini memiliki cara yang sama seperti penelitian (Noldi, 2020), dalam penelitiannya penggambaran fisik objek kendaraan menggunakan metode newton d’alembert yang juga serupa dengan penelitian ini, dari penggambaran fisik juga dilakukan tiga penggandengan yaitu penggandengan statik, dinamik dan statik dinamik, penurunan gaya menggunakan support motion setelah itu eksekusi dari bentuk penurunan gaya-gaya tersebut menggunakan analisis modus getar hingga persamaan diferensial gaya. Penelitian dari noldi ini serupa dengan penelitian yang dilakukan hanya saja perbedaannya pencarian respon dinamis dari persamaan diferensial gerak menggunakan metode beda hingga dalam software matlab.
Penelitian sebelumnya tentang respon dinamis kendaraan saat diberi eksitasi kejut salah satunya yaitu (Umi; Agus, 2018) yang menganalisis suspensi motor dengan sistem suspensi double shockbreaker untuk mencari solusi persamaan dari model matematika sistem suspensi sepeda motor. Dalam penelitianya parameter yang dicari adalah nilai dari tingkat redaman sistem suspensi sepeda motor dengan menganalogikan sistem dua pegas yang disusun secara paralel dengan satu beban, hal yang diteliti juga adalah untuk mengetahui tingkat dari keakuratan runge kutta dalam menyelesaikan model sistem suspensi secara numerik.
Penelitian lain berupa analisis kenyamanan dalam tinjauan satu derajat dimana kendaraan diasumsikan sebagai kendaraan satu roda dan dilakukan uji tekan suspensi pada mesin MTS (Materials Testing System) dan hasil percobaan menggunakan Simulink Mathlab (Nugroho, 2018). Sebelumnya
juga pada penelitian (Olviani; Guntur, 2014) dilakukan analisis kenyamanya pada system suspensi dan dibandingkan dengan standar ISO 2631 dimana bentuk respon yang dicari bukan hanya respon posisi tetapi juga respon kecepatan dan percepatan namun untuk menetukan semua parameternya, penelitian dari olviani dan guntur ini mengguanakan software simulink.
2.2 Metode Newton D’alembert
Metode newton d’alembert merupakan bentuk pengembangan baru, pengertian paling tepat untuk menjelaskan tentang metode ini adalah jika sebuah gaya dari benda bergerak dengan hukum newton II, dengan memasukan prinsip d’alembert dari benda yang bergerak itu maka bisa dimasukan hukum newton I sehingga hasil reaksi tidak lagi nol.
2.3 Sistem Dua Derajat Kebebasan
Sistem getaran dua derajat kebebasan adalah sistem getaran yang memiliki dua kordinat dengan dua frekuensi natural dalam menyatakan persamaan geraknya. Bila terjadi getaran pada salah satu frekuensinya maka hubungan amplitude kedua koordinat dinyatakan sebagai ragam normal (Dewanto, 1999).
Sistem dua derajata kebebasan secara umum memiliki dua bentuk sistem yaitu dua derajat kebebasan tak teredam dan teredam,
Gambar 2. 3 Sistem dua derajat kebebasan tak teredam (a) dua derajat kebebasan teredam (b)
(sumber: Thompson, 1972)
2.4 Gerak Penopang (Support Motion)
Pada beberapa kasus getaran gaya eksitasi tidak langsung bekerja pada massa atau sistem kendaraan itu sendiri tetapi melalui penopang dari sistem kendaraan, dengan kondisi profil jalan yang tidak menentu eksitasi getaran akan melalui sistem penopang.
Gambar 2.4 Sistem yang diektistasi oleh gerak titik penopang (sumber: Thompson, 1972)
Pada posisi simpangan, pegas dan redaman menjadi gaya-gaya yang membuat system tak seimbang dan persamaan diferensial menjadi,
𝑚𝑥̈ = −𝑘 (𝑥̈ − 𝑦) − 𝑐 (𝑥̈ − 𝑦 ) 2
. 1
Dengan substitusi
Persamaan 2.1 menjadi
Gerak dasar digambarkan y = 𝑌 sin ⍵𝑡 dimana ᵶ mengganti 𝑥̈ dan 𝑚⍵2 𝑌
menggantikan𝑚ℯ⍵2. Solusi dapat ditulis menjadi
Jika massa absolut ditambahkan, maka 𝑥̈ dapat dicari dari 𝑥̈ = z + y dengan menggunakan bentuk eksponsial untuk gerak harmonik diperoleh
Subtitusikan ke dalam persamaan 2.3
z = 𝑥̈ − 𝑦 2.1 𝑚z + 𝑐ż + 𝑘z = - 𝑚ÿ = 𝑚⍵2 𝑌 sin ⍵𝑡 2.2 z = Ζsin (⍵𝑡 − 𝜙) Ζ = m⍵2 𝑌 √(k−m⍵2)2+(c⍵)2 tan 𝜙 = c⍵ k−m⍵2 2.3 y = 𝑌𝑒𝑖𝜔𝑡 z = Ζ𝑒𝑖(𝜔−𝜙)= (Ζ𝑒−𝑖𝜙))𝑒𝑖𝜔𝑡 𝑥̈ = Х𝑒𝑖(𝜔−𝜙) = (Х𝑒−𝑖𝜙)) 𝑒𝑖𝜔𝑡 2.4
Ζ𝑒−𝑖𝜙)= m⍵2 𝑌
(k−m⍵2+𝑖⍵c) dan
Untuk amplitudo dan fasa keadaan tunak adalah
|Х 𝑌| = √
k2 + (⍵c)2
k − m⍵2+ (⍵c)2 2.6
Dan
Pada gambar 2.3 harus diamati bahwa kurva amplitude untuk redaman yang berbeda mempunya nilai |Х 𝑌 ⁄ | = 1.0 yang sama pada frekuensi ⍵ ⍵⁄ 𝑛 = √2.
Gambar 2.4 Diagram untuk persamaan (2.6) dan (2.7) (Sumber: Thompson, 1972) (Thompson, 1972) 𝑥̈ = (Ζ𝑒−𝑖𝜙)+ 𝑌)𝑒𝑖𝜔𝑡 = ((k−m⍵k + 2𝑖⍵c+ 𝑖⍵c)) 𝑌𝑒 𝑖𝜔𝑡 2.5
tan 𝜓 =
mc⍵3 k (k−m⍵2+(⍵c)2) 2.72.5 Getaran Transien 2.5.1 Respon Impulse
Impulse adalah gaya yang dintegralkan terhadap waktu
Unit impulse terjadi pada t=0
Jika unit impulse terjadi pada saat t=
τ,
maka didefinisikan olehPerhatikan bahwa 𝛿(𝑡 −
τ
) adalah unit impulse yang digeser t positif sejajar denganτ.
Secara matematis , unit impulse haruslah mempunyai- Tebal pulsa nol
- Luas daerah tunggal (=1) - Ketinggian yang tak hingga
Sifat penting lain dari unit impulse adalah jika 𝛿(𝑡 −
τ
) dikalikan dengan sembarang fungsi F(t) seperti gambar berikut, hasil kalinya akan nol kecuali di t=τ,
∫ 𝐹̅(𝑡) 𝑑𝑡 2.8 𝛿(𝑡 −τ
) =0untuk t ≠
τ
∫ 𝛿(𝑡 −τ
) 𝑑𝑡 = 1 ∞ 0 2.9Dan integral waktunya menjadi
Impulse adalah perubahan momentum dan dalam bentuk persamaan
adalah
Impulse 𝐹̅ yang bekerja pada massa akan menghasilkan perubahan tiba-tiba pada kecepatan sebesar 𝐹̅⁄ 𝑚
2.5.1 Metode Runge Kutta
Metode runge kutta adalah metode dalam memecahkan masalah nilai awal persamaan diferensia dari mulai orde terkecil yaitu metode runge kutta orde dua hinga dilanjutkan dengan orde yang lebih tinggi. Dalam metode Runge-Kutta persamaan diferensial orde kedua adalah pertama direduksi menjadi dua persamaan orde pertama. Sebagai contoh, pertimbangkan persamaan diferensial untuk sistem kebebasan derajat tunggal, yang mungkin ditulis sebagai
∫0∞𝑓(𝑡) . 𝛿(𝑡 −τ) 𝑑𝑡 = 𝑓(τ) 0<
τ
<∞ 2.10Dengan membiarkan x = y persamaan diatas direduksi menjadi dua persamaan berikut
x = y 𝑦 = f (x, y, t)
2.13
Baik x dan y di sekitar xi dan yi dapat diekspresikan dalam deret seri
Taylor. Membiarkan bertambahnya waktu menjadi h = ∆t
x = xi +
(
𝑑𝑥 𝑑𝑡)
h + ( 𝑑2𝑥 𝑑𝑡2)
ℎ 2+ ...
y = yi +(
𝑑𝑦 𝑑𝑡)
h + ( 𝑑2𝑦 𝑑𝑡2)
ℎ 2+ ...
2.14Suku tengah dari persamaan runge-kutta dipecah menjadi dua suku dan empat nilai t, x, y, dan tarif dihitung untuk setiap titik i sebagai berikut
ẍ = 1
t x y = x f = 𝑦 = ẍ T1 = ti X1 = xi Y1 = yi F1 = f (T1, X1, Y1) T2 = ti + ℎ 2 X2 = xi + Y1 ℎ 2 Y2 = yi + F1 ℎ 2 F2 = f (T2, X2, Y2) T3 = ti + ℎ 2 X3 = xi + Y2 ℎ 2 Y3 = yi + F2 ℎ 2 F3 = f (T3, X3, Y3) T4 = ti + h X4 = xi + Y3h Y4 = yi + F3h F4 = f (T4, X4, Y4)
Jumlah ini kemudian digunakan dalam rumus perulangan berikut
xi+ 1 = xi + ℎ 6
[
Y1 + 2Y2 + 2Y2 + Y4]
2.15 yi+ 1 = yi + ℎ 6[
F1 + 2F2 + 2F2 + F4]
2.16 (Thompson, 1972)2.6 Analisis Modus Getar
Tujuan utama menganalisis modus getar Eksperimental adalah mendapatkan parameter-parameter modus getar, yaitu Frekuensi pribadi,
Rasio redaman, dan modus getar normal dari sistem yang akan dikaji. Pada
prakteknya sistem dinamik digetarkan dengan rentang frekuensi tertentu. Kemudian dengan peralatan tertentu diambil fungsi transfernya. Fungsi transfer merupakan perbandingan antara respons sistim dinamik dengan gaya eksistensinya. Setelah fungsi transfer di peroleh dengan teknik CURVE- FITTING akan diperoleh parameter-parameter dinamik struktur tersebut.
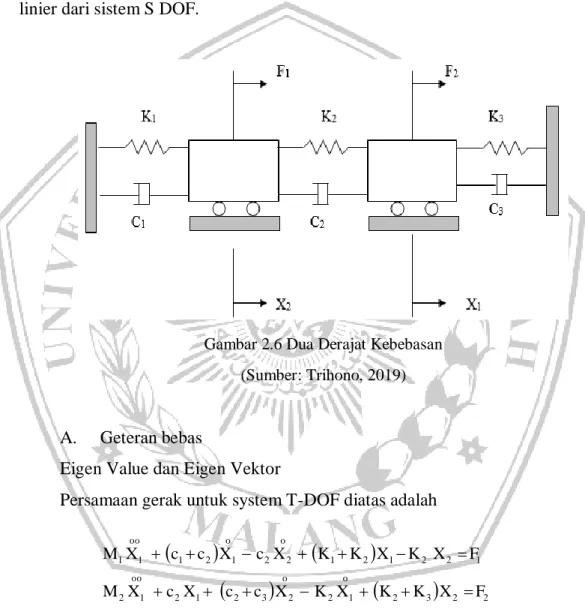
Pada analisis modus getar teoritik, struktur dianggap sebagai suatu sistem getar yang terdiri dari massa-massa dan peredam . Persamaan gerak yang diperoleh dalam hal ini pada umumnya masih dalam bentuk terkopel selanjutnya dalam analisis diubah menjadi tidak terkopel. Hal ini berarti respons suatu sistem M DOF dapat dinyatakan sebagai super posisisi (Penggabungan) linier dari sistem S DOF.
Gambar 2.6 Dua Derajat Kebebasan (Sumber: Trihono, 2019)
A. Geteran bebas
Eigen Value dan Eigen Vektor
Persamaan gerak untuk system T-DOF diatas adalah
2 3
2 2 o 1 2 o 2 3 2 1 2 oo 1 2 1 2 2 1 2 1 o 2 2 o 1 2 1 oo 1 1 F X K K X K X c c X c X M F X K X K K X c X c c X M Dalam bentuk matriks : 2 1 1 3 2 2 2 2 1 1 3 2 2 2 2 1 1 2 1 M 0 0 M F F X X K K K K K K X X c c c c c c X X o o oo oo
Penentuan : Frekuensi pribadi Modus getar normal
3 2 2 2 2 1 2 1 oo k k k k k k K M 0 0 M M 0 X K X MAsumsi : Gerakan – harmonik
2 i i oo ω λ X λ X
0 ) 0 0 1 1 ...(* ... ... ... ... V I λ K M M : dikalikan Bila X V V K M λ ATAU X K X M λ Dari persamaan diatas dapat ditarik kesimpulan , bahwa:
0 a ... ... λ a λ a λ tik karakteris .Persamaan ... ... ... ... 0 I λ K M n 2 n 2 1 n 1 n 1 Polinom dalam , dengan orde : n
Akar-akar I dari persamaan karateristik ini dinamakan EIGENVALUES. Frekuensi pribadi tidak teredam : I = I2
Bila frekuensi pribadi tak-teredam, dimasukkan dalam persamaan (*) diatas maka diperoleh satu pengertian:
Bentuk modus getar normal
Natural (principal) mode shape :
V i Eigen vektor
Secara realistik menyatakan pola deformasi dinamik dari struktur pada masing-masing frekuensi pribadi yang bersangkutan.
Karena persamaan diferensial adalah Homogen maka yang diperoleh perbandingan antara amplitude yang sebenarnya tergantung pada :
kondisi awal
Posisi dan besar gaya eksitasi (Trihono, 2019)
2.7 Software Matlab
Gambar 2.7 Logo perusahaan yang menaungi mathlab (Sumber: http://www.mathwork.com)
Dalam penelitian ini software matlab digunakan untuk menyelesaikan persamaan respon sistem yang diselesaikan mulai dari dua dof dengan menggunakan analisis modus getar menjadi satu dof, Persamaan satu dof inilah yang dimasukan ke dalam matlab untuk mencari nilai atau parameter untuk melihat grafik dari persamaan respon sistem yang menggunakan metode runge kutta pada persamaan terakhir. Analisa metode runge kutta di gunakan di dalam program mathlab, Perhitungan untuk mencari analisis modus getar juga menggunakan program matlab.
Matlab (Matrix Laboratory) adalah sebuah pemograman dalam ruang lingkup komputasi numerical yang memungkinkan manipulasi matriks, pemplotan fungsi dan data, untuk implementasi algoritma, mathlab juga bisa digunakan untuk pembuatan antar pengguna, dan pengantarmukaan dengan program bahasa lainya. Mathwork perusahaan yang menaungi mathlab juga memberikan sebuah paket tambahan pada mathlab yaitu Simulink yang dapat digunakan sebagai sarana pemodelan, simulasi dan analisis sistem dinamik, Program mathlab sendiri telah digunakan lebih dari satu juta pengguna di bidang pendidikan dan industri.