1
BAB 2 LANDASAN TEORI
2.1. Sistem 3D Scanner
Pemindaian tiga dimensi (3D) merupakan proses pengambilan data berupa bentuk suatu objek untuk membuat pemodelan 3D dari objek tersebut. Model 3D yang tercipta pada dasarnya merupakan kumpulan point yang tersusun pada muka ruang 3D dari objek yang dipindai (Koyuncu & Kullu, 2011). Proses pemindaian 3D dapat dilakukan secara kontak ataupun non-kontak.
2.1.1. Metode Contact
Metode contact adalah pemindaian yang dikumpulkan dari hasil sentuhan permukaan objek benda 3D dengan cara melakukan kontak langsung, mirip dengan meraba dalam sebuah ruangan yang gelap.
Metode ini memiliki keunggulan dalam hal presisi dimana salah satu contohnya adalah Coordinate Measuring Machine (CMM), metode ini banyak digunakan dalam perusahaan manufacturing. Proses dari CMM adalah dengan melakukan kontak langsung antara probe dengan objek yang akan dipindai hal ini menjadikan kerugian dimana objek yang disentuh dapat mengalami perubahan bentuk karena kikisan dari probe yang digunakan. Contoh lain dari metode ini adalah CGI (Computer Generated Imagery).
Kekurangan dari scanner 3D ini adalah perlu melakukan kontak langsung dengan objek yang ingin dipindai, dimana proses ini dapat secara tidak langsung merusak objek yang dipindai jika telah rapuh sehingga tidak disarankan mengunakan metode ini dalam melakukan scan pada benda berharga atau bersejarah.
2.1.2. Metode Contactless
Metode ini menggunakan proses pemindaian dimana data yang dikumpulkan merupakan permukaan objek 3D tanpa melakukan kontak langsung dengan objek. Pemindaian dapat dilkaukan dengan menggunakan suatu sinar pemancar dan pantulan sinar tersebut akan ditangkap oleh suatu kamera. Selain menggunakan sinar, teknik ini juga dapat menggunakan suara seperti ultrasonik.
Dua metode tersebut memiliki kekurangan dan kelebihan masing-masing, namun untuk penggunaan umum digunakan metode contactless. Metode contactless sendiri dapat menerapkan beberapa algoritma, yaitu:
2.1.2.1. Structured Light
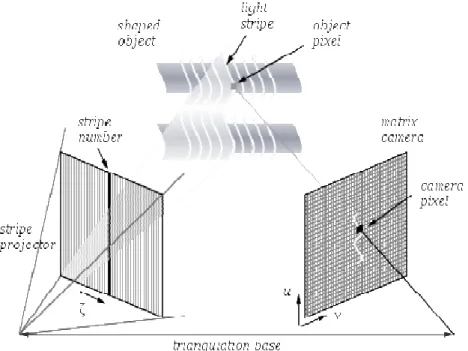
Sistem kerja dari metode ini adalah dengan meproyeksikan sebuah cahaya dengan pola tertentu kepada objek yang akan dipindai. Cahaya yang diproyeksikan tidak hanya dalam bentuk garis sempit namun juga dapat berupa suatu pola dua dimensi.
Sebuah garis cahaya yang diproyeksikan pada permukaan objek akan menghasilkan garis pencahayaan, yang jika dilihat akan tampak menyimpang dari sisi perspektif lain dibandingkan dari sudut pandang proyektor. Hasil penyimpangan inilah yang akan digunakan untuk melakukan merekrontruksi geometri dari bentuk permukaan objek yang ingin dipindai.
Gambar 2.1 Contoh Set Up Structured Light (Sumber:(
http://images-mediawiki-sites.thefullwiki.org/06/1/0/5/43784581935689675.png )
Gambar 2.1 menunjukkan salah satu proyeksi dari metode ini dimana jika dilihat merupakan pengabungan dari beberapa metode triangulasi, dengan melakukan penghitungan seperti metode triangulasi maka bisa ditemukan jarak dari titik yang membentuk pola tersebut.
Dilihat dari sudut pandang yang berbeda, pola geometris yang muncul terdistorsi karena bentuk permukaan objek. Meskipun banyak varian lain dari proyeksi cahaya terstruktur yang mungkin diterapkan, pola garis-garis paralel paling banyak digunakan saat ini
Metode ini lebih cepat dan lebih fleksibel jika dibandingakan dengan metode lain, dimana proyeksi cahaya berpola yang terdiri dari banyak garis sekaligus, oleh karenanya dimungkinkan untuk mengakuisisi banyak sampel secara bersamaan.
2.1.2.2. Coded Light
Metode ini dilakukan dengan mengganti salah satu kamera atau dua kamera yang digunakan dengan perangkat yang memproyeksikan pola cahaya ke permukaan objek. Perangkat yang digunakan saat ini adalah proyektor video. Perangkat tersebut memproyeksikan gambar dengan struktur tertentu sehingga piksel dapat diatur dengan mudah untuk membedakan gambar dengan menggunakan local coding. Titik yang terproyeksi gambar akan ditangkap oleh kamera yang ada.
2.1.2.3. Time-of-flight
Metode ini pada dasarnya melakukan pemindaian dengan menggunakan laser untuk memindai objek. Kedalaman objek diperoleh dengan cara menghitung dan membandingkan waktu tempuh yang dibutuhkan sinar laser yang dipancarkan hingga pantulan diterima oleh detector (Malhotra, Gupta, & Kant, 2011). Teknik ini dapat memindai objek dengan jarak yang sangat jauh, tetapi memiliki akurasi yang kurang baik karena dengan kecepatan cahaya yang mendekati 3x108 m/s maka jarak tempuh untuk 1 mm hanya sekitar 3,3 picosecond. (Wulf & Wagner, 2003) membuat penelitian pemindai 3D dengan teknik time-of-flight dengan jarak pemindaian lebih dari 50 m dan akurasi dalam tingkat centimeter.
Metode ini biasa digunakan untuk membuat model 3D dari objek seperti bangunan, formasi batu-batuan, ataupun beberapa objek landscape lainya. Sistem dapat lebih cepat dalam melakukan pemindaian, yaitu dapat mengukur jarak sekitar 10.000 hingga 100.000 titik dalam 1 detik.
2.1.2.4. Triangulation
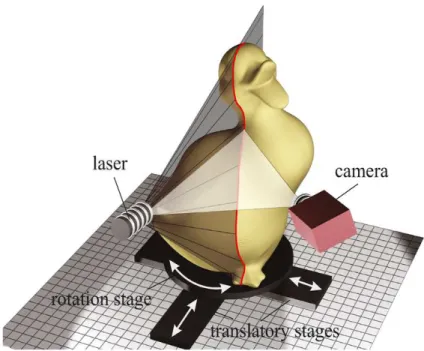
Metode ini pada dasarnya mirip dengan metode time-of-flight yaitu dengan menggunakan laser sebagai sumber cahaya. Perbedaannya pada metode ini tidak menggunakan waktu tempuh sebagai parameter ukuran melainkan memanfaatkan lokasi jatuhnya titik laser pada permukaan benda (Winkelbach, Molkenstruck, & Wahl).
Letak titik laser dipengaruhi oleh perbedaan jarak permukaan benda ke sumber laser. Terdapat parameter yang perlu diperhatikan yaitu sumber laser, kamera, dan titik laser (Akram, Duan, & Usman). Perhitungan jarak dilakukan dengan kombinasi variabel sumber laser, kamera, dan titik laser yang jatuh pada permukaan benda. Ketiga variabel tersebut akan diposisikan membentuk sebuah segitiga.
Proses pemindaian dapat lebih cepat dilakukan dengan menggunakan laser stripe dibandingkan menggunakan laser dot. Prinsip ini dinamakan triangulasi, karena letak sumber laser dan kamera pengamat membentuk sudut seperti pada segitiga (triangle).
Gambar 2.2 Contoh Set Up Triangulation (Sumber:
(http://2.bp.blogspot.com/-XxYzAWtLK8I/UT6GenB7sfI/AAAAAAAAADU/0Deth74rjK8/s160 0/794px-LaserPrinciple.png)
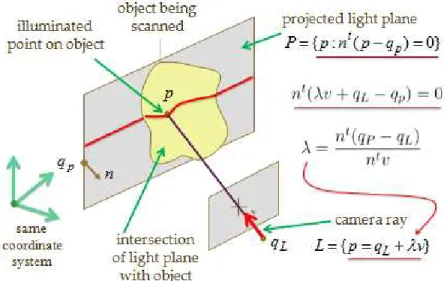
Gambar 2.2 menunjukkan sebuah objek yang sedang dipindai dimana digunakan sebuah laser dan kamera, ketika laser ditembakkan maka akan membentuk sebuah plane dimana selain plane dapat dilihat juga ada sebuah ray yang merupakan sebuah garis cahaya yang akan masuk ke dalam kamera. Dapat dilihat dari objek, kamera, dan laser jika diambil satu titik akan membentuk sebuah segitiga seperti yang tampak pada Gambar 2.2.
Perpotongan dari ray dengan plane yang terbentuk dari objek akan menjadi sebuah titik yang disebut intersection point. Kumpulan dari titik inilah yang nanti akan menjadi sebuah koordinat dalam bentuk 3D point cloud.
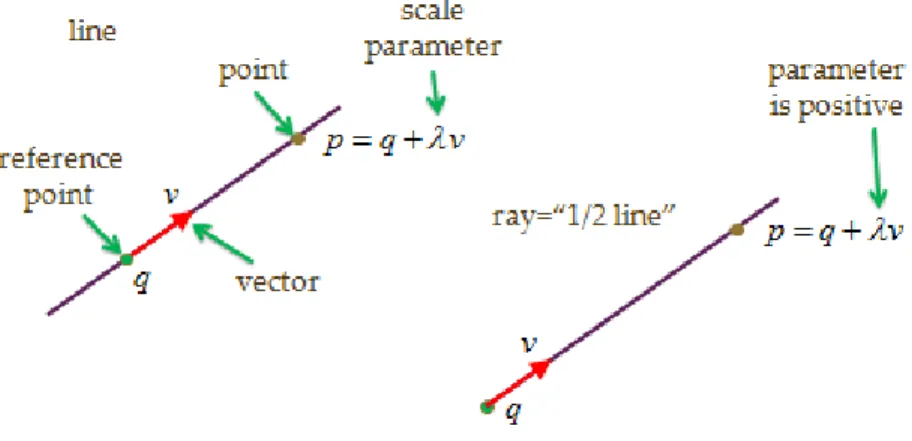
Gambar 2.3 Representasi Parametrik dari Garis dan Ray (Sumber: http://mesh.brown.edu/byo3d/slides/triangulation.zip)
Sebuah garis dapat digambarkan sebagai vektor dimana dengan sebuah titik referensi maka bisa ditentukan letak titik lain dengan mengetahui skala parameter dari vektor tersebut seperti yang nampak pada Gambar 2.3. Ray adalah garis cahaya yang masuk ke dalam kamera dimana berbeda dengan sebuah line yang dapat bergerak secara bolak-balik, sehingga ray dapat digambarkan bernilai positif dengan besar ½ dari line.
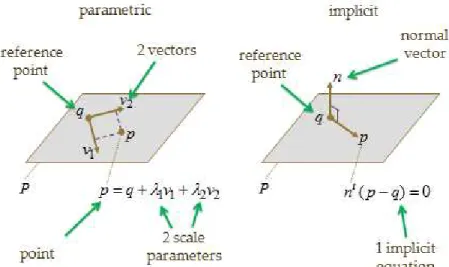
Gambar 2.4 Representasi Parametrik dan Implisit dari Plane (Sumber: http://mesh.brown.edu/byo3d/slides/triangulation.zip)
Sebuah plane dapat direpresentasikan dalam bentuk parametrik dan juga implisit. Parametrik menggambarkan bahwa pada dasarnya suatu titik dalam plane memiliki 2 buah vektor dimana dengan mengetahui 2 skala parameter dari masing-masing vektor tersebut bisa diketahui posisi titik lain dengan persamaan seperti pada Gambar 2.4, namun karena terdapat dua buah vektor berubah seperti pada Gambar 2.4, sedangkan bentuk implisit menggambarkan bahwa suatu plane merupakan kumpulan zeros, dari persamaan linear dalam 3 variabel. Secara geometris jika ada sebuah titik maka titik tersebut memiliki sebuah vektor ke atas yang bisa disebut n. Jika ditempatkan titik lain dan diketahui bahwa itu adalah tegak lurus maka akan didapat persamaan implisit seperti pada Gambar 2.4.
Gambar 2.5 Triangulasi dengan Teknik Perpotongan Garis dengan Bidang
(Sumber: http://mesh.brown.edu/byo3d/slides/triangulation.zip)
Gambar 2.5 menunjukkan 2 bidang atau plane, dimana plane yang pertama merupakan plane pada kondisi sebenarnya dan plane yang kedua merupakan plane dalam kamera. Hubungan dari kedua plane ini adalah garis ray yang masuk ke dalam kamera dan titik p. Titik p terhubung dengan garis yang sama, sehingga p pada camera ray bisa disubstitusikan ke dalam persamaan p pada plane yang sebenarnya sehingga nilai dari skala parameter dapat diketahui. Nilai skala parameter yang telah diketahui dapat disubstitusikan lagi ke dalam persamaan p pada camera ray.
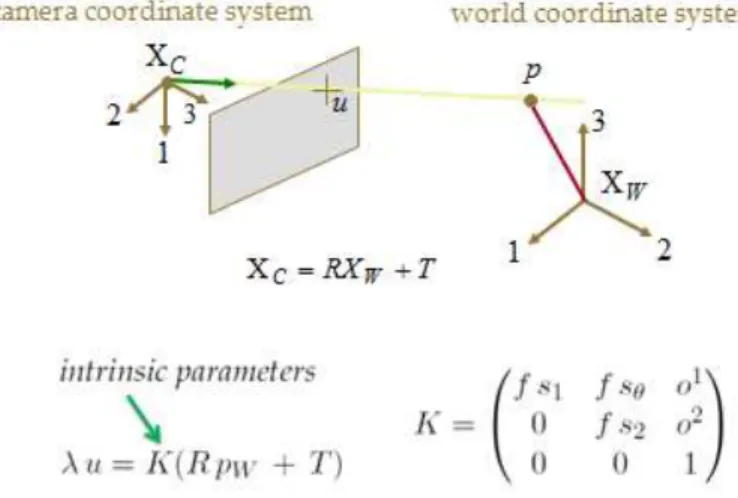
Gambar 2.6 Ekstrinsik Model Pinhole Kamera secara Umum (Sumber: http://mesh.brown.edu/byo3d/slides/triangulation.zip)
Berdasarkan model pinhole koordinat terbagi menjadi dua, yaitu camera coordinate system dan world coordinate system. Nilai dari kedua koordinat adalah sama dalam keadaan ideal. Namun secara umum berbeda seperti nampak pada Gambar 2.6. Berdasarkan konsep ini dengan mengetahui parameter ekstrinsik didapat 2 matriks R dan T akan dilihat hubungan dari kedua koordinat tersebut. Nilai ini akan mempengaruhi persamaan untuk mencari scala parameter yang berubah seperti pada Gambar 2.6.
Gambar 2.7 Intrinsik Model Pinhole Kamera secara Umum (Sumber: http://mesh.brown.edu/byo3d/slides/triangulation.zip)
Dengan memperhatikan kondisi dalam kamera diketahui ada faktor instriksik yang mempengaruhi dengan matriks K sehingga persamaan dari skala parameter berubah seperti pada Gambar 2.7. Dengan beranggapan bahwa Xc merupakan sebuah titik tengah proyeksi maka dapat dilihat persamaan akhir seperti pada Gambar 2.8.
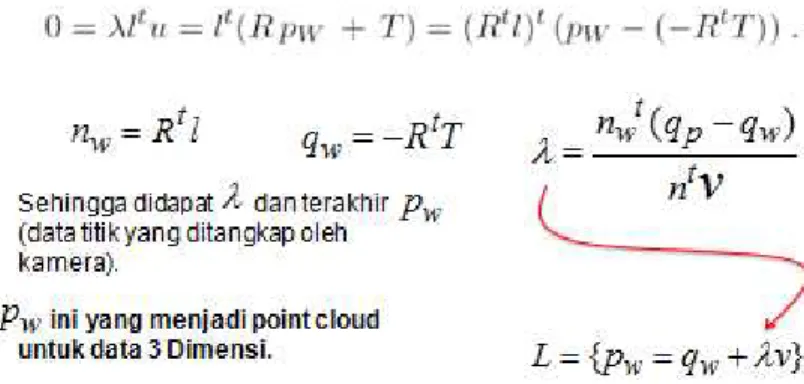
Gambar 2.8 Simpulan Pengambilan Point Cloud (Sumber: http://mesh.brown.edu/byo3d/slides/triangulation.zip)
Dengan mengetahui semua nilai intrinsik dan ekstrinsik serta nilai dari skala parameter, nilai dari P pada world coordinate system dapat diketahui dimana nilai tersebut akan menjadi point cloud.
Jika dibandingkan dengan metode time-of-flight metode ini memiliki akurasi yang jauh lebih baik. Namun jika dilihat melalui range pengukuran metode ini memiliki keterbatasans sehingga metode ini lebih baik digunakan dalam melakukan pengamatan pada objek yang berskala kecil.
2.1.2.5. Photo-based Scanning
Teknik ini menggabungkan teknologi kamera digital dengan software khusus. Tidak seperti teknik lain dimana sistem yang akan menembakkan cahaya ke objek, teknik ini memanfaatkan sumber cahaya dari luar sistem yang kemudian pantulannya ditangkap oleh kamera dari berbagai sudut pandang.
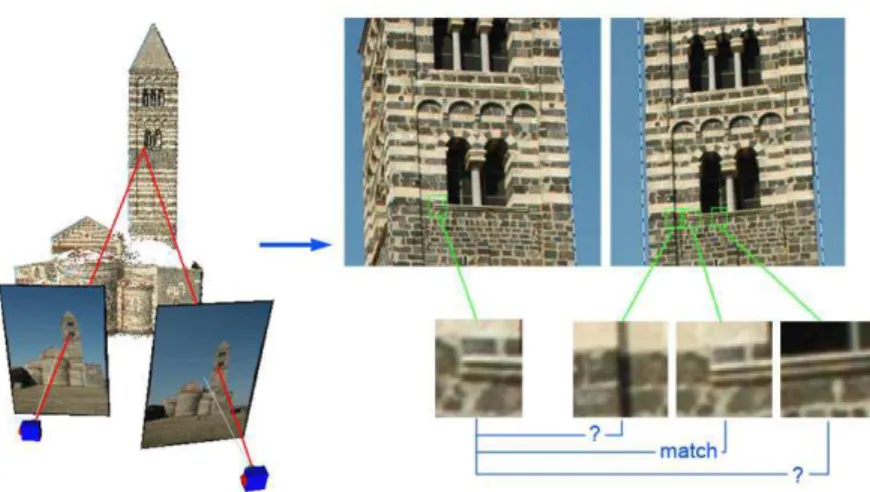
Gambar 2.9 Photo-based Scanning Sumber: (Walford, 2009)
Gambar 2.9 menunjukkan contoh pengambilan gambar objek dari dua sudut pandang. Software khusus akan membandingkan dua foto tersebut berdasarkan bagian-bagian kecil gambar untuk mencocokkan posisinya dalam model 3D (Walford, 2009).
2.2. Laser (Light Amplification by Stimulated Emission of Radiation)
Laser merupakan sumber yang menghasilkan sejenis cahaya (radiasi elektromagnetik) dengan panjang gelombang yang besar (sekitar 600 nm) dan intensitas yang lebih baik dari sumber cahaya yang lain. Sifat dari sinar laser ini adalah koheren dan mempunyai intensitas yang sangat tinggi. Perkembangan laser dimulai pada tahun 1960 dimana dimulai dengan laser He-Ne, setelah itu perkembangan laser dilanjutkan dengan jenis gas yang lain seperti kripton maupun jenis cairan seperti dyne. Perkembangan laser semakin pesat dimulai dengan pengenalan proses yang terjadi dalam interaksi pulsa cahaya ultra pendek yang dihasilkan oleh interaksi laser dan benda. Perkembangan ini membuat laser dapat digunakan dalam telekomunikasi, meteorologi, metrologi, biologi, rangkaian komputer, dan sebagainya.
2.3. Desain Umum 3D Scanner
Teknik triangulasi memberikan pilihan desain yang sederhana dan mempergunakan komponen yang mudah diperoleh. Harga komponen dalam perancangan mempengaruhi akurasi scanner. Penggunaan komponen yang lebih mahal dapat menghasilkan akurasi yang lebih baik, sehingga pemilihan komponen dapat disesuaikan dengan akurasi yang diperlukan dalam pemindaian (Davis & Chen, 2001) (Malhotra, Gupta, & Kant, 2011).
Scanner 3D dengan teknik triangulasi dapat dibuat dengan berbagai macam desain. Dilihat dari komponen yang digunakan, pada umumnya scanner terdiri dari satu sumber laser dan satu kamera, meskipun ada beberapa desain yang mempergunakan dua laser ataupun dua kamera. Dilihat dari mekanisme scanner, ada yang memasangkan motor pada sumber laser sehingga laser akan bergerak menyusuri benda, ada pula yang menggunakan motor pada bidang dimana objek diletakkan sehingga laser memiliki posisi yang tetap dan objeklah yang akan berotasi saat dipindai (Borghese, et al., 1998) (Davis & Chen, 2001).
Kalibrasi merupakan permasalahan yang cukup menonjol dalam perancangan scanner 3D. Scanner 3D yang ada umumnya menggunakan aktuator yang sulit dikalibrasi. Seiring dengan waktu dan banyaknya pemakaian, repeatability dari aktuator akan berkurang sehingga perlu dimonitor secara berkala (Davis & Chen, 2001) (Levoy, et al., 2000).
2.4. Parsley
Parsley membutuhkan kalibrasi dalam pengerjaannya. Kalibrasi dilakukan untuk menentukan parameter dalam melakukan mapping antara objek 3D untuk membuat gambar dua dimensi, dimana dalam Parsley terbagi atas dua yaitu kalibrasi intrinsik dan ekstrinsik. Kalibrasi intrinsik adalah kalibrasi yang menjelaskan geometri dari kamera dimana hal ini dilakukan untuk mengurangi atau menghilangkan distorsi dari kamera (penyimpangan dari bentuk yang ditangkap oleh kamera). Parameter ini berdiri sendiri berdasarkan posisi kamera dan orientasi menurut sistem koordinat. Kalibrasi yang kedua atau kalibrasi ekstrinsik merupakan kalibrasi yang menjelaskan hubungan antara sistem koordinat kamera 3D dengan koordinat yang sebenarnya. Batas dari koordinat adalah pada refecence body, setelah
dua kalibrasi dilakukan maka selanjutnya adalah menentukan plane dimana berfungsi untuk posisi peletakan benda seperti pada gambar berikut.
Gambar 2.10 Setup 3D Scanner Parsley
(Sumber : (Winkelbach, Molkenstruck,, & Wahl(2006)))
Sebagian dari sinar laser akan jatuh pada benda saat laser ditembakkan dan sebagian akan jatuh pada reference body. Sinar laser yang jatuh pada objek akan ditangkap oleh kamera, dimana bagian yang ditangkap oleh kamera merupakan bagian dari objek yang terkena laser. Parsley akan dapat mengetahui posisi dari point cloud dengan mengetahui plane dan nilai dari kalibrasi ekstrinsik, sehingga data dapat diambil dengan konsep triangulasi. Laser yang bergerak akan berpindah tempat secara horizontal dimana jika tidak ada parameter untuk menentukan tinggi data yang didapat akan tertimpa sehingga dengan telah melakukan kalibrasi ekstrinsik laser yang jatuh pada reference body akan digunakan sebagai referensi. Hal ini dapat dilihat dengan pergerakan laser keatas atau kebawah data yang didapat makin banyak. Beberapa hal yang perlu diperhatikan dalam pengambilan data yaitu.
2.4.1. Pinhole Kamera dan Perspective Projection
Sebuah gambaran sederhana dan popular dari model geometri untuk sebuah kamera atau proyektor adalah pinhole model, yang tersusun dari sebuah plane dan sebuah titik eksternal di dalam plane. Plane sendiri dapat diartikan sebagai image plane, dan titik eksternal dapat di lihat sebagai center of projection.
Proses kerja sebuah kamera pada dasarnya adalah merubah bentuk 3D menjadi 2D, dimana tiap titik dalam 3D mengambarkan sebuah garis unik yang melewati center of projection. Garis yang melewati center of projection akan saling bersinggungan di satu titik dimana secara matematik konsep ini disebut perspectic projection.
Gambar 2.11 Pinhole Model (Sumber:
https://www.teachengineering.org/collection/cub_/lessons/cub_images/cub_soundan dlight_lesson08_activity1_image1.jpg )
Gambar 2.11 menunjukkan sebuah model dimana terbagi atas 3 bagian yaitu objek, pinhole, dan image plane. Pinhole dapat diartikan sebagai center of projection dan image plane adalah image dimana bayangan terpantul dari objek. Proses kerja dari Gambar 2.11 adalah cahaya akan menyinari objek dimana akan menciptakan garis seperti yang telah dijelaskan sebelumnya, garis cahaya yang tercipta tidak hanya dua seperti pada gambar di atas namun banyak garis dimana akan dipantulkan dalam image plane dan membentuk gambaran objek secara terbalik.
2.4.2. Proyeksi Geometri
Cahaya bergerak membentuk sebuah garis lurus, dimana dalam kamera gambar dari objek yang dilewati cahaya akan membentuk gambaran data 2D
yang dalam pengertiannya disebut proyeksi. Proyeksi geometri merupakan proses pengambaran ulang suatu objek 3D dalam bentuk 2D dalam bentuk titik.
Gambar 2.12 Model 3D Benda
Gambar 2.12 menunjukkan sebuah model benda 3D dimana terdapat suatu vektor garis. Dalam sebuah gambaran 2D hanya terdapat garis dan titik dimana hal ini berbeda dengan 3D yang memiliki garis, titik, dan bidang. Beberapa konversi akan dilakukan pada proyeksi geometri dari objek 3D menjadi 2D, dimana titik akan dihilangkan, garis akan diubah menjadi titik, dan bidang akan diubah menjadi garis.
Gambar 2.13 Proyeksi Garis Geometri 3D
Gambar 2.13 menunjukkan sebuah garis yang diproyeksikan menjadi titik. Objek 3D yang berupa garis lingkaran jika ingin digambarkan pada image plane maka berdasarkan konsep proyeksi akan ditarik satu garis lurus dari titik 0 sampai pada benda secara perspektif. Perpotongan garis dengan image plane akan digunakan untuk membentuk gambaran benda. Di sini tidak hanya ada satu garis namun ada banyak garis yang digunakan untuk acuan pembentukan gambar pada image plane.
Jika bidang yang melewati image plane maka akan tampak seperti gambar berikut.
Gambar 2.14 Proyeksi Bidang Geometri 3D
Berbeda dengan proyeksi garis yang membentuk titik ketika berpotongan dengan image plane, sebuah bidang akan membentuk garis ketika bepotongan dengan image plane. Konsep inilah yang akan digunakan dalam rekontruksi pada 3D scanner.
2.5. Previous Works
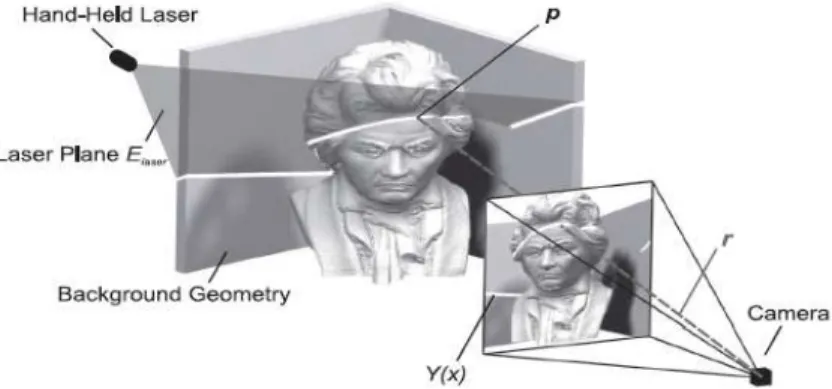
(Davis & Chen, 2001) mencoba membuat sebuah desain scanner 3D dengan algoritma triangulasi yang memerlukan kalibrasi minimum. Penelitian tersebut mencoba membuat suatu scanner 3D yang menggunakan dua sudut pandang berbeda untuk menangkap pantulan laser. Motor dipasangkan pada sumber laser sehingga laser bergerak menyusuri objek, tetapi motor tidak membutuhkan proses kalibrasi yang sulit. Hal ini dikarenakan akurasi pemindaian lebih dititikberatkan pada dua sudut pandang kamera daripada akurasi gerakan motor. Penelitian tersebut dibuktikan dengan menggunakan sumber laser handheld.
Gambar 2.15 Desain Pemindai 3D dengan Dua Sudut Pandang Kamera (Sumber: (Davis & Chen, 2001))
Gambar 2.15 menunjukkan rancangan scanner 3D dengan satu buah kamera yang dibagi menjadi dua sudut pandang melalui cermin. Garis pada bidang menandakan luas tiap sudut pandang kamera. Daerah yang saling menumpuk merupakan volume kerja scanner. Kamera yang digunakan memiliki resolusi efektif 480x240 piksel, sehingga setiap sudut pandang memiliki resolusi efektif 240x240 piksel. Berdasarkan rancangan tersebut, scanner memiliki volume kerja dengan lebar 440 mm dan kedalaman 550 mm. Berdasarkan hal tersebut dapat diketahui resolusi kedalaman scanner, yaitu 440 mm / 240 = 1,8 mm. Resolusi kedalaman yang lebih tinggi dapat diperoleh dengan memperkecil volume kerja scanner ataupun menggunakan kamera dengan resolusi yang lebih tinggi.
(Malhotra, Gupta, & Kant, 2011) membuat sebuah sistem scanner 3D dengan algoritma triangulasi. Sistem scanner yang dibuat menggunakan satu sumber laser dan sebuah web camera (webcam), serta mengeliminasi kebutuhan kalibrasi aktuator yang rumit. Laser ditembakkan ke cermin yang dihubungkan ke motor. Pantulan laser dari cermin akan menyusuri objek dan ditangkap kamera.
Gambar 2.16 Contoh Pemindaian 3D secara Horizontal dan Vertikal (Sumber: (Malhotra, Gupta, & Kant, 2011))
Gambar 2.16 menunjukkan bahwa proses pemindaian dapat dilakukan secara horizontal (Gambar 2.16 kiri) ataupun vertikal (Gambar 2.16 kanan). Penelitian tersebut menyebutkan bahwa proses pemindaian memerlukan beberapa kali perulangan untuk memperoleh hasil gambar 3D dari suatu objek. Kecepatan gerak motor mempengaruhi hasil pemindaian, dimana kecepatan yang terlalu tinggi atau rendah akan menyebabkan adanya piksel yang hilang.
(Aydar, Akyol, & Duran, 2011) membuat sebuah sistem scanner 3D dengan menggunakan algoritma triangulasi dan software DAVID.
Gambar 2.17 Desain Pemindai 3D dengan Software DAVID (Sumber: (Aydar, Akyol, & Duran, 2011))
Gambar 2.17 menunjukkan sistem scanner yang terdiri dari sebuah komputer, sumber laser, kamera, dan sebuah latar belakang sebagai titik kontrol. Sumber laser digerakkan oleh motor stepper. Hasil penelitian ini menyebutkan beberapa hal yang perlu dipertimbangkan untuk memperoleh hasil pemindaian yang lebih baik menggunakan sistem scanner 3D dengan software DAVID. Beberapa hal tersebut di antaranya adalah letak kamera dan sumber laser, dimana sudut antara keduanya tidak boleh terlalu lancip. Hal lain untuk dipertimbangkan adalah ketebalan garis laser, dimana garis laser yang lebih tipis akan memberikan hasil yang lebih baik.