Dasar Teori 7 BAB II
DASAR TEORI
2.1. Getaran
Getaran erat sekali kaitannya dengan gerak osilasi benda dan gaya yang terkait dengan gerak itu. Semua benda yang mempunyai massa dan elastisitas mampu bergetar. Mesin dan struktur rekayasa (engineering) mengalami getaran sampai derajat tertentu, dan rancangannya biasanya memerlukan pertimbangan sifat osilasinya.
Secara umum getaran dikelompokkan menjadi dua getaran ,yaitu getaran bebas dan getaran paksa. Getaran bebas terjadi jika sistem berosilasi karena bekerjanya gaya yang ada dalam sistem itu sendiri (inherent) dan tidak ada gaya luar yang bekerja. Sistem yang bergetar bebas akan bergetar pada satu atau lebih
frekuensi naturalnya yang merupakan sifat sistem dinamika yang dibentuk oleh
distribusi massa dan kekakuannya.
Getaran yang terjadi karena rangsangan gaya luar disebut getaran paksa, Jika rangsangan tersebut berosilasi, maka sistem dipaksa untuk bergetar pada frekuensi rangsangan. Jika frekuensi rangsangan sama dengan salah satu frekuensi natural sistem, maka akan didapat keadaan resonansi, dan osilasi besar yang berbahaya mungkin terjadi. Kerusakan pada struktur besar seperti jembatan, kapal atau sayap pesawat terbang, merupakan kejadian menakutkan yang disebabkan resonansi. Jadi, perhitungan frekuensi natural merupakan hal penting yang utama dalam pelajaran getaran terutama masalah resonansi.
Dasar Teori 8 Semua sistem yang bergetar mengalami redaman sampai derajat tertentu karena energi didisipasi oleh gesekan dan tahanan lain. Jika redaman itu kecil, maka pengaruh-nya sangat kecil pada frekuensi natural sistem, dan perhitungan frekuensi natural biasanya dilaksanakan atas dasar tidak ada redaman. Sebaliknya redaman adalah penting sekali untuk membatasi amplitude osilasi pada waktu resonansi.
Jumlah koordinat bebas yang dibutuhkan untuk menggambarkan gerak sistem disebut derajat kebebasan sistem. Jadi suatu partikel bebas yang mengalami gerak umum dalam ruang akan mempunyai tiga derajat kebebasan, sedangkan benda kaku akan mem-punyai enam derajat kebebasan, yaitu tiga komponen posisi dan tiga sudut yang menyatakan orientasinya.
2.1.1. Elemen dari Sebuah Sistem Vibratory
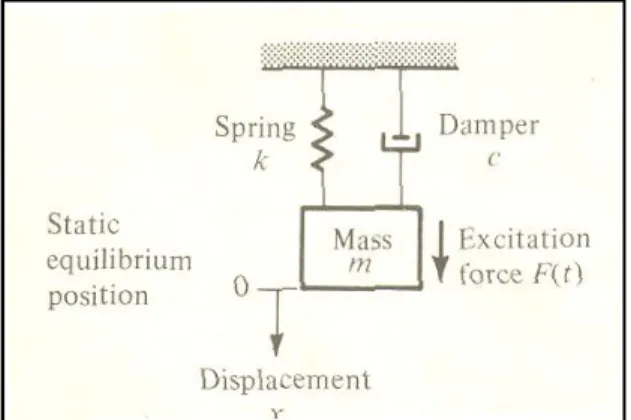
Elemen (unsur) yang merupakan suatu sistem vibratory digambarkan dalam Gambar 2.1. Unsur-unsur itu adalah diidealkan dan disebut (1) massa, (2) pegas, (3) damper, dan (4) eksitasi. Tiga unsur-unsur pertama itu menggambarkan sistem fisik. Sebagai contoh, itu mungkin dapat dikatakan bahwa suatu sistem yang diberikan terdiri dari massa, pegas, dan damper tersusun sebagai yang diperlihatkan dalam Gambar 2.1. Energi mungkin saja disimpan dalam massa dan pegas serta membuang pada damper dalam bentuk panas. Energi masuk dalam sistem melalui aplikasi dari suatu eksitasi. Sejalan dengan yang diperlihatkan dalam Gambar 2.1, suatu gaya eksitasi diterapkan untuk system massa m.
Dasar Teori 9 Massa m diredakan sebagai benda tegar. Itu melakukan getaran dan bisa meningkatkan atau menghilangkan tenaga gerak sesuai dengan kecepatan mengubah massa. Dari hukum gerak Newton, produk dari massa dan akselerasi nya sepadan dengan gaya yang diterapkan pada massa, dan akselerasi berlangsung dalam arah dimana gaya diaplikasikan. Usaha (work) dari massa adalah produk antara waktu dan jarak pada arah gaya. Usaha ditransformasikan dari massa ke energi kinetik. Energi kinetik meningkat jika usaha bernilai positif dan menurun jika usaha adalah negatif.
Gambar 2.1 Elemen Sistem Vibratori
(Sumber: Theory of Vibration With Applications, Prentice-Hall, Inc., Englewood Cliffs, NJ, United States of America, 1972.)
Pegas k mepunyai sifat elasticity (kekenyalan) dan diasumsikan dengan massa yang diabaikan . Gaya pegas terjadi jika pegas berubah bentuk, seperti perpanjangan atau pengerutan dari pegas coil. Oleh karena itu gaya pegas kekuatan terjadi hanya jika ada perubahan displacement (panjang) relatif antara kedua ujung pegas. Usaha yang dilakukan dalam mengubah bentuk pegas ditransformasikan ke dalam energi potensial, yaitu, strain energi (ketegangan) yang disimpan dalam pegas. Pegas linier yang mematuhi hukum Hooke, yaitu, gaya pegas sebanding dengan displacement pegas. Konstanta dari proportionality,
Dasar Teori 10 diukur dalam gaya per satuan displacement yang disebut kekakuan, atau konstanta pegas k.
Damper c tidak mempunyai massa maupun elasticity . Gaya damping terjadi hanya jika ada relative motion antara kedua ujung damper. Usaha atau input energi pada damper dikonversikan ke dalam panas. Karenanya elemen damping adalah nonconservative. Viscous damping, dimana gaya damping sebanding dengan kecepatan, adalah disebut linier damping . Viscous damping, atau ekivalennya, adalah secara umum diasumsikan dalam rekayasa (engineering).
Koefisien viscous damping c diukur dalam unit gaya per velocity. Banyak jenis nonlinier damping ditemui pada umumnya ditemui. Sebagai contoh, frictional drag suatu benda dalam fluida adalah kira-kira sebanding dengan kecepatan kuadrat, tetapi nilai tepat dari eksponen tergantung pada banyak variabel.
Energi memasuki suatu sistem melalui aplikasi suatu eksitasi. Gaya -eksitasi mungkin saja diaplikasikan pada massa atau suatu -eksitasi gerak diaplikasikan pada pegas dan damper. Suatu gaya eksitasi F(t) diaplikasikan pada massa m digambarkan dalam Gamb. 2.1. Eksitasi bervariasi sesuai dengan fungsi waktu. Karenanya eksitasi selalu diketahui pada waktu yang diberikan. Sebagai alternatif, jika sistem disimpan dari suatu topangan (support), eksitasi mungkin saja diterapkan pada sistem melalui suatu gerakan yang menentukan pada topangan. Dalam permesinan, eksitasi sering timbul dari displacement unbalance komponen. Getaran sistem dinamis di bawah pengaruh dari suatu eksitasi disebut
Dasar Teori 11 getaran paksa. Getaran paksa, bagaimanapun, adalah sering didefinisikan sebagai getaran yang disebabkan oleh satu eksitasi periodik.
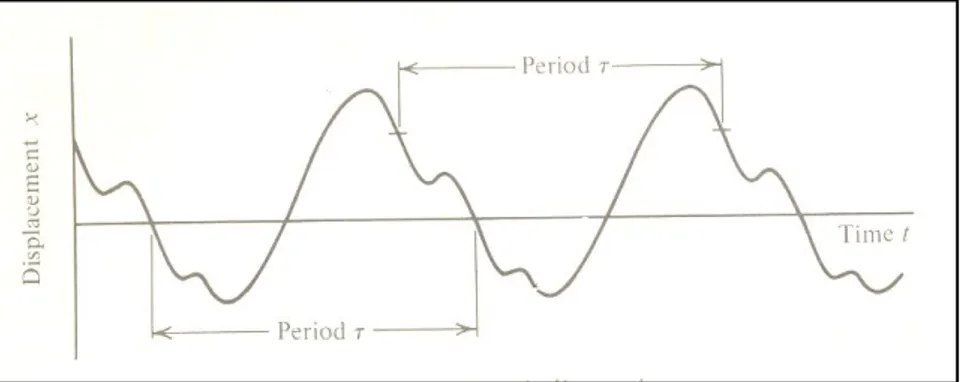
Jika gerak vibratory adalah periodik, system gerak berulang pada interval yang waktu sama seperti dalam Gambar 2.2 waktu minimum yang diperlukan sistem untuk mengulangi gerakan nya disebut perioda T, yaitu waktu untuk melengkapi siklus gerakan. Frekuensi f adalah jumlah gerakan ulang per unit waktu. Gerak yang tidak berulang pada interval waktu disebut gerak tidak periodic (aperiodic motion).
Sebuah sistem dinamis dapat diset kearah gerak oleh beberapa kondisi awal, atau gangguan pada waktu sepadan dengan nol. Jika tidak ada gangguan atau eksitasi diterapkan setelah waktu nol, gerakan system tsb disebut getaran bebas (free vibrations). Karenanya getaran bebas menggambarkan perilaku alami atau gaya alami dari vibration suatu sistem. Syarat awal adalah suatu input energi. Jika pegas berdiformasi, inputnya adalah energi potensial. Jika massa diberikan kecepatan awal, inputnya energi kinetik. Karenanya kondisi awal sehubungan dengan energi pada awalnya tersimpan dalam sistem.
Gambar 2.2 Periodisasi Gerak Vibratori
(Sumber: Theory of Vibration With Applications, Prentice-Hall, Inc., Englewood Cliffs, NJ, United States of America, 1972.)
Dasar Teori 12 Jika sistem tidak mempunyai redaman, maka tidak ada disipasi (hilang) energi. Kondisi awal akan menyebabkan sistem bergetar dan sistem getaran bebas tidak terendam tidak akan hilang dengan waktu. Jika suatu sistem mempunyai damping , energi akan hilang dalam damper. Karenanya vibrasi bebas akan secepatnya hilang lenyap dan sistem kemudian tersisa di posisi keseimbangan statisnya. Karena energi tersimpan terkait dengan kondisi awal, getaran bebas juga menggambarkan perilaku alami dari sistem sebagaimana itu diam dari keadaan awalnya pada keseimbangan statisnya.
Suatu properti yang penting dari sistem linier adalah bahwa mereka mengikuti principle of superposition. . Sebagai contoh, gerak resultan dari simultan dari dua excitasi adalah kombinasi gerak linier dari setiap akting eksitasi secara terpisah. Nilai m, c, dan k dari elemen dalam Gamb. 1-1 sering disebut parameter sistem. Koefisien atau parameters dalam persamaan adalah constants. Persamaan gerak dari sistem menjadi suatu persamaan differensial biasa linier dengan koefisien tetap yang dapat mudah dipecahkan .
Tabel 2.1
Perbandingan Sistem Rectilinear dan Rotational
Rectilinear Rotational
Spring force = kx Spring torque = kt Damping force =
Damping torque = ct Inertia force = m
Inertia torque = J
Dasar Teori 13 Sejauh ini, kita telah diskusikan hanya dengan sistem gerak lurus. Untuk sistem gerak rotasi, elemennya adalah (1) momen inersia massa J, (2) pegas torsi dengan konstanta kt dan (3) torsional damper dengan torsional damping coefficient ct .
Displacement sudut θ dapat disamakan dengan satu jarak seperti garis lurus x, dan eksitasi torsi T(t) dapat disamakan dengan gaya eksitasi F(t). Kedua type sistem tsb diperlihatkan dalam Tabel 2.1.
2.1.2. Contoh Gerak Vibratory
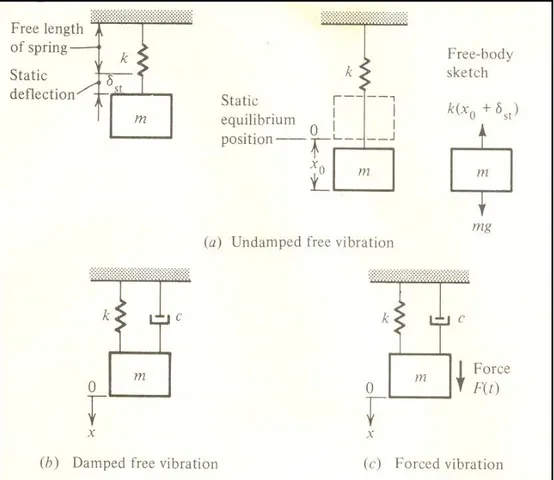
Sistem pegas –massa dari Gamb. 2.3(a) menggambarkan getaran bebas tidak teredam. Massa m awalnya diam di posisi keseimbangan statisnya. Pada massa dikerjakan oleh dua gaya yang sama besar tetapi saling berlawanan, yakni gaya pegas sepadan dengan produk konstanta pegas fc dan defleksi statis δst
pegas, dan gaya gravitasi mg berkaitan dengan beban massa m. Jika massa dipindahkan dari keseimbangan sejauh x0 dan dilepaskan dengan kecepatan awal nol. Terlihat pada free body diagram ,gaya pegas sama dengan k(x0 +δSt).
Dalam hal ini, energi potensial tersimpan dalam pegas dan sistem adalah konservatif karena tidak ada damper untuk membuang energi. Ketika massa bergerak melewati keseimbangan, energi potensial sistem adalah nol, maka energi potensial ditransformasikan menjadi energi kinetik dari massa. Ketika massa bergerak di atas posisi keseimbangan, pegas melakukan kompresi dan meningkatkan potential energi dari energi kinetik massa. Ketika massa berada di
Dasar Teori 14 posisi paling atas nya, kecepatan nya adalah nol. Seluruh energi kinetik massa ditransformasikan menjadi energi potensial.
Gambar 2.3 Contoh Gerak Vibratory
(Sumber: Theory of Vibration With Applications, Prentice-Hall, Inc., Englewood Cliffs, NJ, United States of America, 1972.)
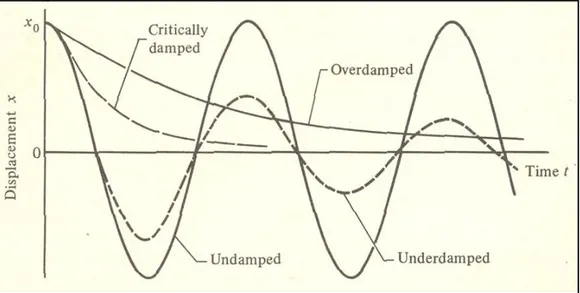
Damping viscous akan menyebabkan (1) akhirnya dying out of dari osilasi dan (2) sistem beroksilasi lebih pelan dibandingkan tanpa damper.
Dengan kata lain, pengurangan amplitudo di setiap siklus osilasi, dan frekuensi getaran dengan adanya viscous damping adalah lebih rendah dari frekuensi tanpa teredam. Jika damping terlalu besar, gerak adalah nonoscillatory, dikatakan overdamped. Massa, ketika dilepaskan, akan cenderung kembali ke posisi keseimbangan statis nya,dikatakan sebagai critically damped jika resultan
Dasar Teori 15 geraknya antara overdamped dan posisi keseimbangan statis. Sistem getaran bebas diperlihatkan pada Gamb. 2.3(a).
Gambar 2.4 Sistem Getaran Bebas digambarkan pada Gambar 2.3(a) dan (b) Displacement Awal = x0; kecepatan awal = 0.
(Sumber: Theory of Vibration With Applications, Prentice-Hall, Inc., Englewood Cliffs, NJ, United States of America, 1972.)
Jika gaya eksitasi diterapkan untuk system massa seperti yang terlihat dalam Gamb. 2.3(c), resultan gerak-nya tergantung pada kondisi awal dan eksitasi.
Gerak yang diteruskan oleh eksitasi sinusoidal disebut steady -state vibration atau steady-state response. Karenanya steady-state response harus pada frekuensi eksitasi tanpa menghiraukan kondisi awal atau frekuensi natural dari sistem. Akan diperlihatkan bahwa steady-state response respon dijelaskan oleh integral dan gerak transient oleh fungsi komplementer persamaan differensial dari sistem.
Dasar Teori 16 Resonansi terjadi bila frekuensi eksitasi sama dengan frekuensi natural dari sistem. Tidak ada input energi diperlukan untuk memelihara getaran dari sistem tidak teredam di frekuensi natural nya. Dengan begitu, input energi apapun akan digunakan untuk mengembangkan amplitudo dari getaran, dan amplitudo pada resonansi dari suatu sistem tidak teredam akan meningkat tanpa batas.
2.2 Gerak Harmonik
Gerak osilasi dapat berulang secara teratur, seperti pada roda pengimbang sebuah arloji, atau dapat juga sangat tidak teratur, seperti misalnya pada gempa burni. Jika gerak itu berulang dalam selang waktu yang sama τ , maka gerak disebut gerak periodik. Waktu pengulangan T tersebut discbut perioda osilasi, dan kebalikannya, f= 1/T, disebut frekuensi. Jika gerak dinyatakan dalam fungsi waktu x(t), maka setiap gerak periodik harus memenuhi hubungan (t) = x(t +τ).
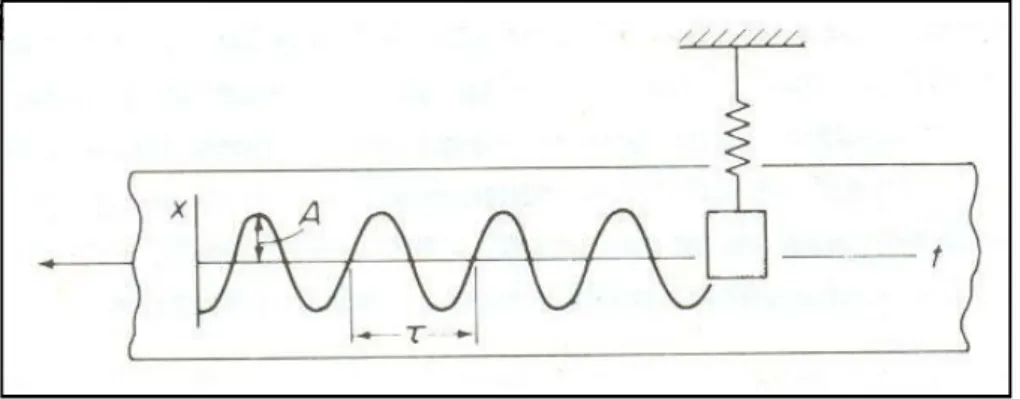
Bentuk gerak periodik yang paling sederhana adalah gerak harmonik. Hal ini dapat diperagakan dengan sebuah massa yang digantung pada sebuah pegas ringan, seperti terlihat dalam gambar 2.5. Jika massa tersebut dipindahkan dari posisi diam-nya dan dilepaskan, maka massa tersebut akan berosilasi naik turun. Dengan menempatkan suatu sumber cahaya pada massa yang berosilasi tersebut, maka geraknya dapat direkam pada suatu keping film peka cahaya yang bergerak pada kecepatan konstan.
Gerak yang terekam pada film dapat dinyatakan dengan persamaan :
t
A
x
sin
2
(2.1)Dasar Teori 17 Semua gerak bolak balik atau berulang adalah gerak periodik dan gerak periodik yang paling sederhana adalah gerak harmonik atau sinusoidal.
Pada gambar 2.5 terlihat gerak titik P berdasarkan gerak lingkaran, dengan kecepatan sudut ω tetap. Bila titik P berordinat x dan y ,maka:
Gambar 2.5 Gerak Harmonik
(Sumber: Theory of Vibration With Applications, Prentice-Hall, Inc., Englewood Cliffs, NJ, United States of America, 1972.)
= sin = sin( + )
= cos = cos ( + ) (2.2) Disini α adalah sudut phase yaitu harga awal saat t=0.
Gerak pada gambar 2.5 merupakan gerak dari gambar 2.6 dibawah ini.
Gambar 2.6 Contoh Gerak Harmonik
(Sumber: Theory of Vibration With Applications, Prentice-Hall, Inc., Englewood Cliffs, NJ, United States of America, 1972.)
Dasar Teori 18 2.2.1 Parameter Getaran
Dengan A adalah amplitude osilasi diukur dari posisi setimbang phassa, dan r adalah perioda. Gerak diulang pada T= r. Gerak harmonik sering dinyatakan sebagai proyeksi suatu titik yang bergerak melingkar dengan kecepatan tetap kepada suatu garis lurus, seperti terlihat dalam Gambar 2.5. Dengan kecepatan sudut garis sebesar ωt , dapat dituliskan sebagai
x
A
sin
t
(2.3)Besaran ω biasanya diukur. dalam radian per detik dan disebut frekuensi
lingkaran f. Karena gerak berulang dalam 2π radian, maka didapat hubungan
dengan π dan f adalah perioda dan frekuensi gerak harmonik, berturut-turut biasanya diukur dalam detik dan siklus per detik.
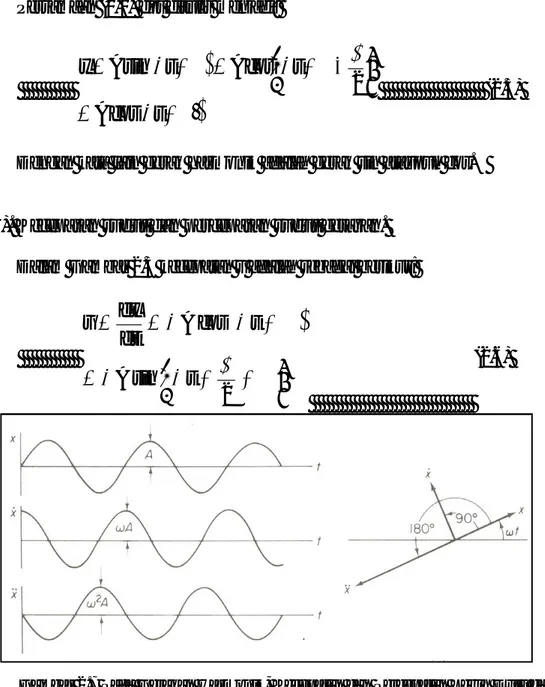
Kecepatan dan percepatan gerak harmonik dapat diperoleh secara mudah dengan diferensiasi Persamaan (2.3). Dengan menggunakan notasi titik untuk turunannya, maka didapat:
(a). Amplitudo dan Frekuensi sudut getaran
A adalah amplitudo, ω sbg frekuensi lingkaran atau kecepatan sudut dan T adalah perioda,dirumuskan sbg :
T
f
T
1
2
(2.4) Frekuensi dalam c/s, cps, Hz.Dasar Teori 19 Persamaan (2.1) dpt ditulis menjadi:
t
A
t
A
t
A
x
cos
2
cos
sin
(2.5)Dengan kata lain gerak harmonik adalah gerak sin ataupun cos.
(b). Kecepatan sudut dan percepatan sudut getaran. Dalam Gambar 2.3 kecepatan v adalah sebagai berikut:
2 sin cos t A t A dt dx v (2.6) Gamb.2.3.Gambar 2.7 Pada Gerakan Harmonik, Kecepatan dan Percepatan Lebih Dulu dari Simpangan dengan ⁄ dan . 2
(Sumber: Theory of Vibration With Applications, Prentice-Hall, Inc., Englewood Cliffs, NJ, United States of America, 1972.)
Percepatan sudut: 2 2
dt
x
d
dt
dv
a
Dasar Teori 20
t
A
t
A
dt
x
d
dt
dv
a
sin
sin
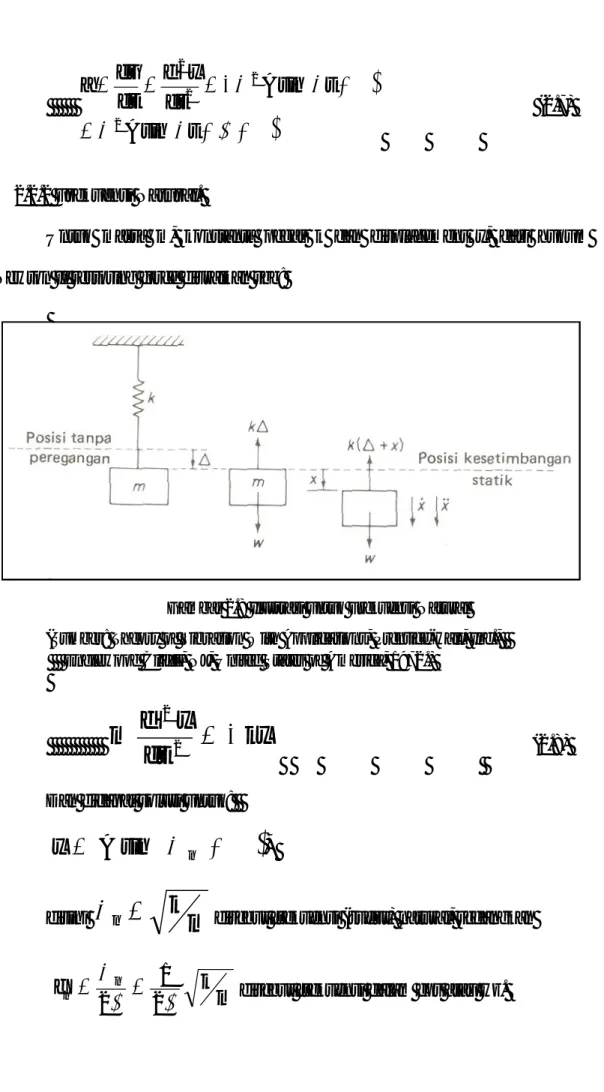
2 2 2 2 (2.7) 2.2.2 Frekuensi Natural.Untuk massa m, konstanta pegas k dan displacement x, dari hukum Newton II restoring force diuraikan sbb:
Gambar 2.8 Ilustrasi untuk Frekuensi Natural (Sumber: Theory of Vibration With Applications, Prentice-Hall, Inc., Englewood Cliffs, NJ, United States of America, 1972.)
kx
dt
x
d
m
2
2 (2.8)Dan didapat solusi untuk:
,
sin
A
nx
disini
n
k
m
disebut frekuensi (sudut) natural, sedangkanm
k
f
n n
2
1
2
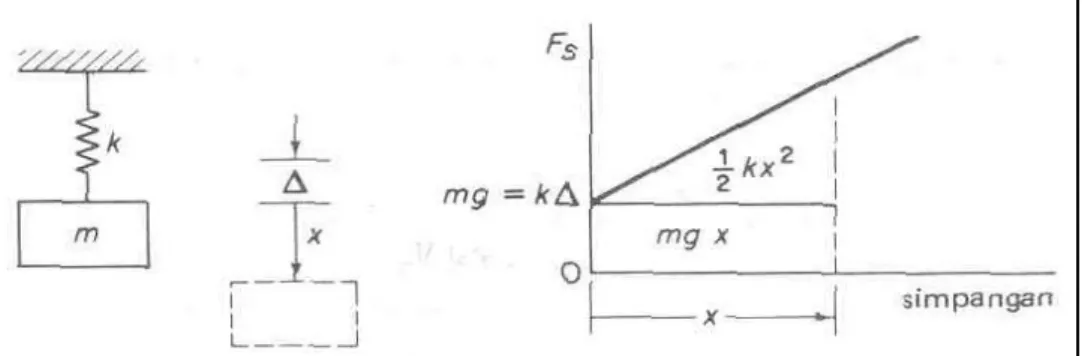
Dasar Teori 21 2.2.3 Energi Getaran.
Dari hukum energi kinetik yaitu E=1/2 mv2, maka gambar disam ping menunjukkan bahwa integral :
Gambar 2.9 Energi Getaran
(Sumber: Theory of Vibration With Applications, Prentice-Hall, Inc., Englewood Cliffs, NJ, United States of America, 1972.)
A AA
k
kx
kxdx
0 2 0 22
2
/
1
(2.9)disini
x
A
sin
nt
.
Sedangkan energi kinetik:
A
t
k
A
t
m
mv
2
n
n 2 2 2
ncos
2
cos
2
2
/
1
(2-10) Dari pers.(2.10):kx
k
A
nt
2 2 2sin
2
2
1
(2-11)Pers.(2.10) dan (2.11), keduanya bernilai maksimum yg sama sedangkan ditiap sebarang titik jumlah kedua energi:
2 2 2 2 2 22
sin
cos
2
2
2
A
k
t
t
A
k
x
k
v
m
n n
(2.12)Dasar Teori 22 2.2.4 Gelombang Harmonik
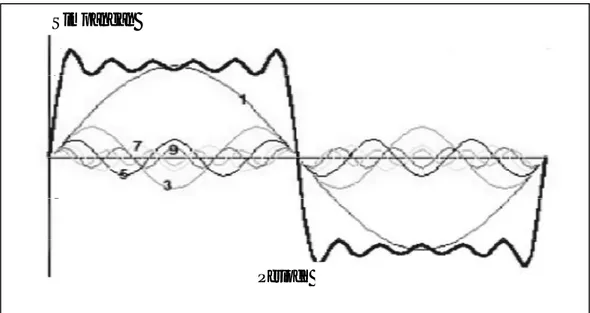
Gambar di bawah ini merupakan salah satu bentuk gelombang menarik. Asumsikan bahwa simpangan (displacement) diwakili oleh sumbu Y, sedangkan sumbu X menjadi skala waktu dalam 1 detik.
Simpangan
Gambar 2.10 Variasi Siklus Gelombang Harmonik (Sumber: Practical Machinery Vibration Analysis &
Predictive Maintenance. Newnes an Imprint of Elsevier, Oxford, 2004.) Gelombang pertama terdiri dari 1 gelombang. Hal ini diwakili oleh satu
siklus. Sebagai skala waktu 1 detik, ia memiliki frekuensi 1 Hz.
Gelombang berikutnya terdiri dari 3 gelombang. Hal ini dapat dilihat bahwa ia memiliki tiga siklus pada periode yang sama gelombang pertama. Dengan demikian, ia memiliki frekuensi 3 Hz.
Gelombang berikutnya terdiri dari 5 gelombang, hal ini dapat ditelusuri dari jumlahnya yang terdiri dari 5 siklus pada periode yang sama gelombang pertama. Gelombang ini memiliki frekuensi 5 Hz.
Demikian pula dengan gelombang berikutnya yang terdiri dari 7 dan 9 gelombang, masing – masing memiliki 7 dan 9 Hz.
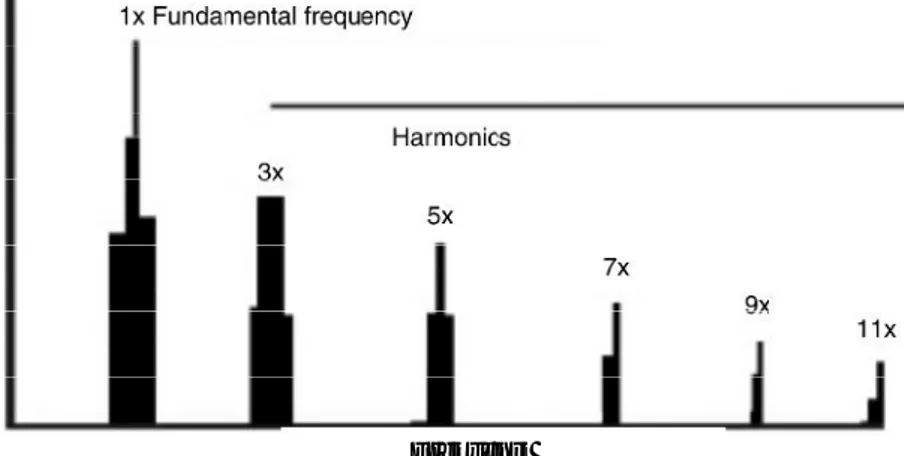
Dasar Teori 23 Gelombang seri ganjil di atas (1,3,5,7,9...) merupakan gelombang harmonik ganjil dari frekuensi dasar. Sedangkan bila gelombang dengan seri frekuensi 1,2,3,4,5.... hz, maka seri ini ditandai dengan seri frekuensi dasar. Hal yang menjadi catatan dari gelombang di atas dengan bentuk yang unik bila ditambahkan ke frekuensi dasar, maka akan didapat sejumlah gelombang yang terlihat seperti bentuk gelombang persegi yang lebih kompleks. Bila gelombang sinusoidal ditambahkan terhadap gelombang kompleks tersebut, maka diperlukan analisa Fourier untuk memudahkan proses analisanya. Melalui proses operasi matematika yang rumit, yang mentransformasikan bentuk gelombang dari domain waktu ke domain frekuensi dan sebaliknya.
2.2.5 Analisa Fourier
Analisis Fourier istilah lain untuk transformasi sebuah waktu gelombang ke spektrum amplitudo vs frekuensi nilai. Analisis Fourier kadang-kadang disebut sebagai analisis spektrum, dan dapat dilakukan dengan penganalisa Fast Fourier
Transform (FFT).
Gambar 2.11 Penganalisa Fast Fourier Transform (FFT)
(Sumber:Practical Machinery Vibration Analysis & Predictive Maintenance. Newnes an Imprint of Elsevier, Oxford, 2004.)
Frekuensi A m pl it udo
Dasar Teori 24 2.2.6 Korelasi Perpindahan (Displacement), Kecepatan (Velocity) dan
Percepatan (Acceleration)
Displacement, Velocity dan Acceleration merupakan karakteristik getaran
yang diukur untuk menentukan tingkat tingkat keparahan (severity) getaran dan ketiganya adalah komponen amplitudo getaran. Amplitudo getaran merupakan indikator pertama untuk menunjukkan sejauh mana baik atau buruknya kondisi suatu mesin.1 Umumnya amplitudo getaran yang lebih besar berbanding lurus dengan tingkat kegagalan mesin yang tinggi pula.
(Sumber:Practical Machinery Vibration Analysis & Predictive Maintenance. Newnes an Imprint of Elsevier, Oxford, 2004.)
Pada range frekuensi tinggi, acceleration secara signifikan lebih mudah dipergunakan daripada velocity atau displacement. Untuk frekuensi lebih dari
1 Cornellius Scheffer dan Paresh Girdhar, Practical Machinery Vibration Analysis and &
Predictive Maintenance, Newnes, Linacre House, Jordan Hill, Oxford, 2004. h. 21.
Dasar Teori 25 1000 Hz (60 kcpm) atau 1500 Hz (90 kcpm) satuan pengukuran untuk getaran adalah acceleration. Secara umum untuk frekuensi antara 10 Hz (600 cpm) dan 1000 Hz (60 kcpm), velocity merupakan indikator yang tepat untuk meneliti tingkat keparahan (severity) dari getaran.
2.3 Mesin Frais
Mesin frais adalah salah satu jenis mesin perkakas yang paling mampu untuk melakukan berbagai macam tugas dibandingkan dengan jenis mesin perkakas lainnya. Permukaan yang datar maupun yang berlekuk/bergelombang, dapat di proses mesin ini dengan ketelitian yang tinggi, termasuk pemotongan sudut, celah, roda gigi juga dapat di proses dengan baik menggunakan mesin ini.
Ditinjau dari posisi benda kerja terhadap pisau frais, proses pengefraisan dapat dibedakan sebagai berikut:
a. Aksial. Digunakan ketika pisau menghasiljkan permukaan sejajar dengan sumbu putar dari pisau frais
b. Radial. Terjadi bila proses pemotongan dimana pisau memproduksi permukaan tegaklurus terhadap poros putaran pisau frais
c. Menyudut. Ketika pisau frais menghasilkan permukaan menyudut terhadap poros utama pisau frais
d. Pembentukan (Form) ketika pisau frais menghasilkan bentuk-bentuk tertentu sesuai dengan bentuk pisau frais.
Dasar Teori 26
a. Pemotongan aksial b. Pemotongan Radial
c. Pemotongan sudut d. Pemotongan Bentuk
Gambar 2.13 Berbagai Macam Posisi Benda Kerja Terhadap Mesin Frais
(Sumber: Mempergunakan Mesin Frais (Kompleks), Penyusun Tim Fakultas Teknik Univ. Negeri Yogyakarta, Desember 2004)
Proses pengefraisan sangat ditentukan keberhasilannya oleh ketepatan pemilihan pahat yang sesuai. Faktor lain adalah posisi benda kerja terhadap pisau frais. Pada dasarnya pisau frais dibagi menjadi dua kategori yaitu pisau frais solid dan insert (pisu sisip). Pisau solid adalah pisau frais yang gigi-giginya menyatu dengan bodi pisau. Bentuk giginya dapat berupa gigi lurus atau gigi miring terhadap poros pisau. Pisau frais solid biasanya terbuat dari stainless steel. Pisau inserted (sisip) adalah pisau dengan mata pisau yang disisipkan atau dipasangkan pada tubuh pisau. Mata pisau sisip ini biasanya terbuat dari High Speed Steel (HSS) atau Cemented Carbide. Beberapa macam pisau yang dipergunakan di mesin frais antara lain:
a. Pisau Lurus (Plain milling Cutter) b. Pisau Sisi (Side milling Cutter) c. Pisau Muka (Face Milling Cutter)
d. Pisau Sudut (Angular Cutter)
Dasar Teori 27 f. Pisau Woodruuff (Woodrooff Keyseat Cutters)
g. Flycutter
h. Pisau gergaji (Metal Slitting Saw)] i. Pisau Jari (End Mills)
Gambar 2.14 Macam – macam Pisau Frais
(Sumber: Mempergunakan Mesin Frais (Kompleks), Penyusun Tim Fakultas Teknik Univ. Negeri Yogyakarta, Desember 2004)
2.4 Bantalan
Bantalan adalah elemen mesin yang menumpu poros berbeban, sehingga putaran atau gerakan bolak-baliknya dapat berlangsung secara halus, aman dan panjang umur. Bantalan harus cukup kokoh untuk memungkinkan poros serta elemen lainnya bekerja dengan baik. Jika bantalan tidak berfungsi dengan baik maka prestasi seluruh sistem akan menurun atau tak dapat bekerja secara semestinya. Jadi, bantalan dalam permesinan dapat disamakan peranannya dengan pondasi pada gedung.
Dasar Teori 28 2.4.1 Klasifikasi Bantalan
Bantalan dapat diklasifikasikan sebagai berikut:
(1). Atas Dasar Gerakan Bantalan Terhadap Poros
a. Bantalan luncur. Pada bantalan ini terjadi gesekan luncur antara poros dan bantalan karena permukaan poros ditumpu oleh permukaan bantalan dengan perantaraan lapisan pelumas.
b. Bantalan gelinding. Pada bantalan ini terjadi gesekan gelinding antara bagian yang berputar dengan yang diam melalui elemen gelinding seperti bola (peluru), rol atau rol jarum dan rol bulat.
(2). Atas Dasar Arah Beban Terhadap Poros
a. Bantalan radial. Arah beban yang ditumpu bantalan ini adalah tegak lurus sumbu poros.
b. Bantalan aksial. Arah beban bantalan ini sejajar dengan sumbu poros.
c. Bantalan gelinding khusus. Bantalan ini dapat menumpu beban yang arahnya sejajar dan tegak lurus sumbu poros.
2.4.2 Perbandingan Antara Bantalan Luncur dan Bantalan Gelinding
Bantalan luncur mampu menumpu poros berputaran tinggi dengan beban besar. Bantalan ini sederhana konstruksinya dan dapat dibuat serta dipasang dengan mudah. Karena gesekannya yang besar pada waktu mulai jalan, bantalan luncur memerlukan awal yang besar. Pelumasan pada bantalan ini tidak begitu sederhana. Panas yang timbul dari gesekan yang besar, terutama pada beban besar, memerlukan pendinginan khusus. Sekalipun demikian, karena adanya
Dasar Teori 29 lapisan pelumas, bantalan ini dapat meredam tumbukan dan getaran sehingga hampir tidak bersuara. Tingkat ketelitian yang diperlukan tidak setinggi bantalan gelinding sehingga dapat lebih murah.
Bantalan gelinding pada umumnya lebih cocok untuk beban kecil daripada bantalan luncur, tergantung pada bentuk elemen gelindingnya. Putaran pada bantalan ini dibatasi oleh gaya sentrifugal yang timbul pada elemen gelinding tersebut. Karena konstruksinya yang sukar dan ketelitiannya yang tinggi, maka bantalan gelinding hanya dapat dibuat oleh pabrik-pabrik tertentu saja. Adapun harganya pada umumnya lebih mahal daripada bantalan luncur. Untuk menekan biaya pembuatan serta memudahkan pemakaian, bantalan gelinding diproduksikan menurut standar dalam pelbagai ukuran dan bentuk. Keunggulan bantalan ini adalah pada gesekannya yang sangat rendah. Pelumasannya pun sangat sederhana, cukup dengan gemuk, bahkan pada macam yang memakai sil sendiri tidak perlu pelumasan lagi. Meskipun ketelitiannya sangat tinggi, namun karena adanya gerakan elemen gelinding dan sangkar, pada putaran tinggi bantalan ini agak gaduh dibandingkan dengan bantalan luncur.
2.4.3 Klasifikasi Bantalan Luncur
Bantalan luncur dapat diklasifikasikan menurut beberapa cara: Menurut bentuk dan letak bagian poros yang ditumpu bantalan
Yaitu bagian yang disebut jurnal, bantalan ini dapat diklasifikasikan seperti gambar di bawah ini:
a. Bantalan radial, yang dapat berbentuk silinder, belahan silinder, elips dan lain-lain.
Dasar Teori 30 b. Bantalan aksial, yang dapat berbentuk engsel, kerah, Michel dan lain-lain. c. Bantalan khusus, yang berbentuk bola dan lain-lain.
Menurut pemakaiannya terdapat bantalan untuk penggunaan umum, bantalan poros engkol, bantalan utama mesin perkakas, bantalan roda kereta api dan lain-lain.
Dalam teknik otomobil, bantalan luncur dapat berupa bus, bantalan logam sinter dan bantalan plastik.
(a) (b) (c) (d)
Gambar 2.15 Macam – macam Bantalan Luncur
(a) bantalan radial polos (b) bantalan radial berkerah (c) bantalan aksial berkerah (d) bantalan aksial
(e) bantalan radial ujung (f) bantalan radial tengah
(e) (f)
(Sumber: Dasar Perencanaan dan Pemilihan Elemen Mesin. PT. Pradnya Paramita, Jakarta, 2004)
2.4.4 Bantalan Aksial
Bantalan aksial diperlukan untuk menahan gaya aksial. Pada dasarnya ada dua macam bentuk, yaitu bantalan telapak dan bantalan kerah.
Dasar Teori 31
(a) (b)
Gambar 2.16 Bantalan aksial
(a) Bantalan aksial telapak (b) Bantalan aksial kerah
(Sumber: Dasar Perencanaan dan Pemilihan Elemen Mesin. PT. Pradnya Paramita, Jakarta, 2004)
Pada bantalan telapak, tekanan yang diberikan oleh bidang telapak poros pada bidang bantalan semakin besar untuk titik yang semakin dekat pada pusat, sehingga perlu dibuat lekukan dengan bentuk tertentu.
Gambar 2.17 Distribusi Tekanan dalam Bantalan Aksial Telapak (Sumber: Dasar Perencanaan dan Pemilihan Elemen Mesin.
PT. Pradnya Paramita, Jakarta, 2004) 2.4.5 Jenis – jenis Bantalan Gelinding
Bantalan gelinding mempunyai keuntungan dari gesekan gelinding yang sangat kecil dibandingkan dengan bantalan luncur. Seperti diperlihatkan pada gambar 4.4, elemen gelinding seperti bola atau rol, dipasang diantara cincin luar dan cincin dalam. Dengan memutar salah satu cincin tersebut, bola atau rol akan membuat gerakan gelinding sehingga gesekan di antaranya akan jauh lebih kecil. Untuk bola atau rol, ketelitian tinggi dalam bentuk dan ukuran merupakan
Dasar Teori 32 keharusan. Karena luas bidang kontak antara bola atau rol dengan cincinnya sangat kecil maka besarnya beban per satuan luas atau tekanannya menjadi sangat tinggi. Dengan demikian bahan yang dipakai harus mempunyai ketahanan dan kekerasan yang tinggi.
Bantalan gelinding, seperti pada bantalan luncur, dapat diklasifikasikan atas: bantalan radial, yang terutama membawa beban radial dan sedikit beban aksial, dan bantalan aksial yang membawa beban yang sejajar sumbu poros. Menurut bentuk elemen gelindingnya, dapat pula dibagi atas bantalan bola dan bantalan rol. Demikian pula dapat dibedakan menurut banyaknya baris dan konstruksi dalamnya. Bantalan yang cincin dalam dan cincin luarnya dapat saling dipisahkan disebut macam pisah.
Menurut pemakaiannya, dapat digolongkan atas bantalan otomobil, bantalan mesin dan bantalan instrumen. Bantalan gelinding biasa terdapat dalam ukuran metris dan inch, distandarkan menurut ISO dengan nomor kode internasional menurut ukurannya. Namun demikian perlu diketahui bahwa bantalan otomobil dapat mempunyai ukuran khusus sesuai dengan pemakaiannya
Gambar 2.18 Macam-macam Bantalan Gelinding
(Sumber: Dasar Perencanaan dan Pemilihan Elemen Mesin. PT. Pradnya Paramita, Jakarta, 2004)
Dasar Teori 33 Menurut diameter luar atau diameter dalamnya, bantalan gelinding dapat dibagi atas:
Diameter luar lebih dari 800 (mm) Ultra besar Diameter luar 180-800 (mm) Besar Diameter luar 80-180 (mm) Sedang Diameter dalam 10 (mm) atau lebih, dan Kecil
Diameter luar sampai 80 (mm)
Diameter dalam kurang dari 10 (mm), dan Diameter kecil Diameter luar 9 (mm) atau lebih