TUGAS AKHIR – ME-141501
ANALISA PERFORMANCE PROPULSI LISTRIK PADA WAHANA BENAM MOTOR DC 2 X 1850 KW, 380 V YANG DICATU DAYA 10260 AH PADA TEGANGAN 115VDC DENGAN RANGKAIAN SERI DAN PARALEL
Ristita Anggarini Widya Ayu Irawati NRP 4212 100 063
Dosen Pembimbing Ir. Sardono Sarwito M.Sc Indra Ranu Kusuma, ST M.Sc
DEPARTEMEN TEKNIK SISTEM PERKAPALAN Fakultas Teknologi Kelautan
Institut Teknologi Sepuluh Nopember Surabaya
2017
ii
“Halaman ini sengaja dikosongkan”
uh
FINAL PROJECT – ME-141501
ANALYSIS OF ELECTRIC PROPULSION PERFORMANCE ON SUBMERSIBLE WITH MOTOR DC 2 X 1850 KW, 380 V SUPPLY POWER 10260 AH AT VOLTAGE 115 VDC ON SERIES AND PARALLEL CIRCUITS
Ristita Anggarini Widya Ayu Irawati NRP 4212 100 063
Dosen Pembimbing Ir. Sardono Sarwito M.Sc Indra Ranu Kusuma, ST M.Sc Department of Marine Engineering Faculty of Marine Technology
Sepuluh Nopember Institute of Technology Surabaya
2017
iv
“Halaman ini sengaja dikosongkan”
vi
“Halaman ini sengaja dikosongkan”
viii
“Halaman ini sengaja dikosongkan”
ix
ANALISA PERFORMANCE PROPULSI LISTRIK PADA WAHANA BENAM MOTOR DC 2 X 1850 KW, 380 V YANG DICATU DAYA 10260 AH PADA TEGANGAN 115VDC DENGAN RANGKAIAN SERI
DAN PARALEL
Nama Mahasiswa : Ristita Anggarini Widya A. I.
NRP : 4212 100 063
Departemen : Teknik Sistem Perkapalan Dosen Pembimbing : Ir. Sardono Sarwito M.Sc
Indra Ranu Kusuma, ST, M.Sc ABSTRAK
Sistem propulsi elektrik adalah sistem pada kapal yang menggunakan motor propulsion sebagai mesin penggerak menggantikan posisi atau kinerja dari mesin utama. Penggunaan mesin diesel sebagai tenaga penggerak baling-baling memiliki beberapa permasalahan dan kelemahan yaitu mesin diesel tidak dapat beroperasi pada saat wahana benam sedang beroperasi di bawah permukaan air laut. Untuk mengatasi masalah tersebut diperlukan alternatif sebagai penggerak kapal. Alternatif tersebut menggunakan motor DC. Wahana benam menggunakan sistem propulsi elektrik dengan motor DC karena motor DC memiliki kelebihan pengaturan putaran yang mudah dilakukan dan tidak menimbulkan noise pada saat wahana benam sedang menyelam.
Penulisan tugas akhir ini akan mengkaji penggunaan motor DC sebagai sistem propulsi elektrik pada wahana benam yang memiliki panjang 59,57 m dengan motor yang dirangkai secara seri dan paralel dengan cara disimulasikan
x
Hasil yang diperoleh dengan tegangan input yang sama adalah putaran yang dihasilkan pada rangkaian paralel lebih besar daripada rangkaian seri, kecepatan yang dihasilkan rangkaian paralel lebih besar daripada rangkaian seri. Sehingga daya yang dihasilkan rangkaian seri lebih rendah daripada rangkaian paralel. Pada rangkaian seri untuk bersembunyi dari lawan dan rangkaian paralel untuk menyusup ke daerah lawan.
Kata kunci :Propulsi Listrik, Motor DC, MATLAB
xi
ANALYSIS OF ELECTRIC PROPULSION PERFORMANCE ON SUBMERSIBLE WITH MOTOR DC 2 X 1850 KW, 380 V SUPPLY POWER 10260 AH AT VOLTAGE 115 VDC ON SERIES AND
PARALLEL CIRCUITS
Name : Ristita Anggarini Widya A. I.
NRP : 4212 100 063
Department : Marine Engineering Advisor : Ir. Sardono Sarwito M.Sc
Indra Ranu Kusuma, ST, M.Sc
ABSTRACT
Electric propulsion is the ship system using propulsion motor to replace performance of main engine.
The application of diesel engine as propulsion system have some problems and weaknesses such as diesel engine unability to operate when submersible ship is operating under sea. To overcome that problems in submersible ship, alternative solution of ship propulsion is required . DC Motor can be used as this alternative solution. Submersible ships use electric propulsion system with DC Motor because DC Motor has advantages of easy rotation setting and does not cause noise when submersible ship is diving.
This thesis will study the application of DC Motor as an electric propulsion system on submersible ship with length 59,57 m in series and parallel circuit by simulation using MATLAB software. The simulation data obtained are rotation and torque of DC Motor.
From these simulation, it can be concluded that parallel circuit rotation is greater than series circuit rotation. It caused the greater speed and lower power in parallel circuit. The series circuit can be used in order to
xii area.
Key word: Propulsion system, DC Motor, MATLAB
xiii
KATA PENGANTAR
Puji dan syukur saya panjatan kehadirat Allah SWT yang telah melimpahkan rahmat dan hidayah-Nya sehingga saya dapat menyelesaikan Skripsi dengan judul “Analisa Performance Propulsi Listrik pada Wahana Benam Motor DC 2 X 1850 Kw, 380 V yang Dicatu Daya 10260 Ah pada Tegangan 115VDC dengan Rangkaian Seri dan Paralel”.
Laporan ini disusun untuk memenuhi mata kuliah Skripsi Departemen Teknik Sistem Perkapalan.
Selama pengerjaan dan penyusunan Skripsi ini, saya mendapatkan banyak dukungan dan bantuan dari berbagai pihak, sehingga saya mengucapkan terima kasih kepada :
1. Ibu dan Ayah serta keluarga besar atas dukungan berupa materiil dan cinta kasih yang diberikan selama ini.
2. Bapak Dr. Eng., M. Badrus Zaman, S.T., M.T., selaku Ketua Departemen Teknik Sistem Perkapalan Fakultas Teknologi Kelautan ITS Surabaya.
3. Bapak Ir. Sardono Sarwito M.Sc dan Bapak Indra Ranu Kusuma, ST. M.Sc. selaku dosen pembimbing I dan II yang telah memberikan banyak masukan dan ilmu bagi saya.
4. Bapak A.A.Bagus Dinariyana Dwi P., ST., MES., Ph.D selaku dosen wali, yang selama 8 semester ini mendukung dan memberikan ilmu yang bermanfaat.
5. Bapak Indera Cahya yag telah memberi banyak ilmu bagi saya.
6. Teman-teman kost saya di Perumahan Dosen ITS Blok U 149 yang banyak mendukung dan membantu saya.
xiv
teknisi maupun member Lab yang telah memberikan semangat dan transfer ilmu selama pengerjaan skripsi.
8. Serta bagi pihak lain, teman-teman dan sahabat- sahabatku yang tidak dapat saya sebutkan satu persatu.
Dalam penulisan skripsi ini saya manyadari bahwa laporan skripsi ini jauh dari kesempurnaan maka dibutuhkan kritik dan saran dari pembaca. Demikian, saya berharap semoga laporan ini bisa bermanfaat bagi yang membacanya.
Surabaya, 17 Januari 2017
xv DAFTAR ISI
LEMBAR PENGESAHAN ... v
ABSTRAK ... ix
KATA PENGANTAR ... xiii
DAFTAR ISI ... xv
DAFTAR GAMBAR ... xix
DAFTAR TABEL ... xxix
BAB I PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Perumusan Masalah ... 2
1.3. Batasan Masalah... 2
1.4. Tujuan ... 3
1.5. Manfaat ... 3
BAB II TINJAUAN PUSTAKA ... 5
2.1. Wahana benam ... 5
2.1.1 Pengertian Wahana benam ... 5
2.1.2 Jenis-Jenis Wahana benam ... 7
2.1.3 Tahanan Wahana benam ... 8
2.2. Sistem Propulsi Elektrik ... 10
2.2.1 Motor DC dan AC Sebagai Penggerak Kapal ... 12
2.3. Motor DC ... 14
2.3.1 Pengertian Motor DC... 14
2.3.2 Bagian-Bagian Motor DC ... 15
2.3.3 Cara Kerja Motor DC ... 16
2.3.4 Jenis-Jenis Motor DC ... 20
xvi
2.3.7 Pengaturan Putaran pada Motor DC ... 26
2.3.8 Torsi dan Torsi Poros ... 29
2.3.9 Rangkaian Motor DC untuk Sistem Propulsi Wahana benam ... 30
2.4. Pemograman MATLAB ... 31
BAB III METODOLOGI PENELITIAN ... 33
3.1 Umum ... 33
3.1.1. Identifikasi dan Perumusan masalah ... 33
3.1.2. Penentuan Data Variasi Rangkaian Motor DC .. 33
3.1.3. Studi Literatur ... 33
3.1.4. Menghitung Tahanan Wahana benam ... 34
3.1.5. Menghitung Torsi yang Dibutuhkan Wahana benam 34 3.1.6. Membuat Rangkaian di Simulink MATLAB ... 34
3.1.7. Melakukan Simulasi dengan menggunakan MATLAB ... 34
3.1.8. Validasi ... 34
3.1.9. Analisa Hasil Simulasi ... 34
3.1.10. Analisa dan Pembahasan ... 34
3.1.11. Menghitung Lama Baterai ... 35
3.1.12. Kesimpulan dan Saran... 35
3.2. Diagram Alir ... 35
BAB IV ANALISA DATA ... 37
4.1. Data Kapal ... 37
xvii
4.2. Data Sistem Propulsi ... 37
4.3. Menghitung Tahanan Wahana benam ... 38
4.4. Menghitung Torsi yang Dibutuhkan Wahana benam 41 4.5. Simulasi Rangkaian Seri Motor DC dengan menggunakan MATLAB ... 41
4.6. Simulasi Rangkaian Paralel Motor DC dengan menggunakan MATLAB ... 55
4.7. Perhitungan Thrust Horse Power (THP), Shaft Horse Power (SHP), Brake Horse Power (BHP), Kecepatan (Vs) dan Torsi Poros ... 68
4.8. Analisa Grafik ... 92
4.8.1. Rangkaian Seri ... 92
4.8.2. Rangkaian Paralel ... 114
4.9. Grafik Performance pada Rangkaian Seri dan Rangkaian Paralel ... 136
4.10. Analisa Perhitungan Lama Baterai pada saat Menyelam ... 152
4.11. Perhitungan Efisiensi Motor ... 153
4.12. Analisa Grafik Efisiensi Motor ... 178
4.13. Simulasi Rangkaian Seri DC-DC Converter dengan menggunakan MATLAB ... 190
4.14. Perhitungan Thrust Horse Power (THP), Shaft Horse Power (SHP), Brake Horse Power (BHP), Kecepatan (Vs) dan Torsi Poros pada Rangkaian Seri dan Rangkaian Paralel DC-DC Converter ... 203
4.15. Analisa Grafik Rangkaian Seri dan Rangkaian Paralel DC-DC Converter ... 207
xviii
4.17. Grafik Perbandingan Rangkaian Seri dan Rangkaian
Paralel Tanpa dan Adanya DC-DC Converter ... 223
BAB V KESIMPULAN DAN SARAN ... 231
5.1. Kesimpulan ... 231
5.2. Saran ... 232
DAFTAR PUSTAKA ... 233
BIODATA PENULIS ... 235
xix
DAFTAR GAMBAR
Gambar 2.1 Model Wahana benam ... 7
Gambar 2.2 Power flow pada sistem propulsi elektrik ... 11
Gambar 2.3 Skema sistem propulsi konvensional dan sistem diesel electric propulsion ... 14
Gambar 2.4 Motor DC ... 15
Gambar 2.5 Bagian-bagian motor DC ... 16
Gambar 2.6 Medan magnet yang membawa arus mengelilingi konduktor ... 16
Gambar 2.7 Medan magnet yang menghalangi konduktor ... 17
Gambar 2.8 Reaksi garis fluks ... 17
Gambar 2.9 Prinsip kerja motor DC ... 19
Gambar 2.10 Rangkaian motor DC penguat terpisah .... 20
Gambar 2.11 Rangkaian motor DC shunt ... 21
Gambar 2.12 Grafik torsi motor DC shunt ... 21
Gambar 2.13 Rangkaian motor DC seri ... 22
Gambar 2.14 Grafik motor DC seri ... 22
Gambar 2.15 Rangkaian motor DC short compound ... 23
Gambar 2.16 Rangkaian motor DC long compound ... 23
Gambar 2.17 Grafik motor DC compound ... 24
Gambar 2.18 Karakteristik T/Ia ... 24
Gambar 2.19 Karakteristik N/Ia ... 24
Gambar 2.20 Karakteristik N/T ... 25
Gambar 2.21 Gaya Lorentz... 25
Gambar 2.22 Rangkaian motor DC dengan pengaturan medan ... 27
xx
Gambar 2.24 Rangkaian motor DC dengan pengaturan
tegangan ... 29
Gambar 2.25 Rangkaian seri motor DC yang akan disimulasikan ... 30
Gambar 2.26 Rangkaian paralel motor DC yang akan disimulasikan ... 30
Gambar 2.27 Logo MATLAB ... 32
Gambar 2.28 Simulink model turbin ... 32
Gambar 3.1 Diagram alir metodologi rangkaian seri ... 35
Gambar 3.2 Diagram alir metodologi rangkaian paralel . 36 Gambar 4.1 Rangkaian Seri Motor DC ... 41
Gambar 4.2 Rangkaian seri motor DC di Simulink ... 42
Gambar 4.3 Rangkaian paralel motor DC ... 55
Gambar 4.4 Rangkaian paralel motor DC di Simulink ... 56
Gambar 4.5 Grafik kecepatan terhadap torsi pada rangkaian seri ketika baterai penuh ... 92
Gambar 4.6 Grafik kecepatan terhadap putaran pada rangkaian seri ketika baterai penuh ... 93
Gambar 4.7 Grafik kecepatan terhadap torsi pada rangkaian seri ketika baterai 90% ... 94
Gambar 4.8 Grafik kecepatan terhadap putaran pada rangkaian seri ketika baterai 90% ... 95
Gambar 4.9 Grafik kecepatan terhadap torsi pada rangkaian seri ketika baterai 80% ... 96
Gambar 4.10 Grafik kecepatan terhadap putaran pada rangkaian seri ketika baterai 80% ... 97
xxi
Gambar 4.11 Grafik kecepatan terhadap torsi pada rangkaian seri ketika baterai 70% ... 98 Gambar 4.12 Grafik kecepatan terhadap putaran pada rangkaian seri ketika baterai 70% ... 99 Gambar 4.13 Grafik kecepatan terhadap torsi pada rangkaian seri ketika baterai 60% ... 100 Gambar 4.14 Grafik kecepatan terhadap putaran pada rangkaian seri ketika baterai 60% ... 101 Gambar 4.15 Grafik kecepatan terhadap torsi pada rangkaian seri ketika baterai 50% ... 102 Gambar 4.16 Grafik kecepatan terhadap putaran pada rangkaian seri ketika baterai 50% ... 103 Gambar 4.17 Grafik kecepatan terhadap torsi pada rangkaian seri ketika baterai 40% ... 104 Gambar 4.18 Grafik kecepatan terhadap putaran pada rangkaian seri ketika baterai 40% ... 105 Gambar 4.19 Grafik kecepatan terhadap torsi pada rangkaian seri ketika baterai 30% ... 106 Gambar 4.20 Grafik kecepatan terhadap putaran pada rangkaian seri ketika baterai 30% ... 107 Gambar 4.21 Grafik kecepatan terhadap torsi pada rangkaian seri ketika baterai 20% ... 108 Gambar 4.22 Grafik kecepatan terhadap putaran pada rangkaian seri ketika baterai 20% ... 109 Gambar 4.23 Grafik kecepatan terhadap torsi pada rangkaian seri ketika baterai 10% ... 110 Gambar 4.24 Grafik kecepatan terhadap putaran pada rangkaian seri ketika baterai 10% ... 111 Gambar 4.25 Grafik kecepatan terhadap torsi pada rangkaian seri ketika mendekati 0 knot ... 112
xxii
Gambar 4.27 Grafik kecepatan terhadap torsi pada rangkaian paralel ketika baterai penuh ... 114 Gambar 4.28 Grafik kecepatan terhadap putaran pada rangkaian paralel ketika baterai penuh ... 115 Gambar 4.29 Grafik kecepatan terhadap torsi pada rangkaian paralel ketika baterai 90% ... 116 Gambar 4.30 Grafik kecepatan terhadap putaran pada rangkaian paralel ketika baterai 90% ... 117 Gambar 4.31 Grafik kecepatan terhadap torsi pada rangkaian paralel ketika baterai 80% ... 118 Gambar 4.32 Grafik kecepatan terhadap putaran pada rangkaian paralel ketika baterai 80% ... 119 Gambar 4.33 Grafik kecepatan terhadap torsi pada rangkaian paralel ketika baterai 70% ... 120 Gambar 4.34 Grafik kecepatan terhadap putaran pada rangkaian paralel ketika baterai 70% ... 121 Gambar 4.35 Grafik kecepatan terhadap torsi pada rangkaian paralel ketika baterai 60% ... 122 Gambar 4.36 Grafik kecepatan terhadap putaran pada rangkaian paralel ketika baterai 60% ... 123 Gambar 4.37 Grafik kecepatan terhadap torsi pada rangkaian paralel ketika baterai 50% ... 124 Gambar 4.38 Grafik kecepatan terhadap putaran pada rangkaian paralel ketika baterai 50% ... 125 Gambar 4.39 Grafik kecepatan terhadap torsi pada rangkaian paralel ketika baterai 40% ... 126 Gambar 4.40 Grafik kecepatan terhadap putaran pada rangkaian paralel ketika baterai 40% ... 127
xxiii
Gambar 4.41 Grafik kecepatan terhadap torsi pada rangkaian paralel ketika baterai 30% ... 128 Gambar 4.42 Grafik kecepatan terhadap putaran pada rangkaian paralel ketika baterai 30% ... 129 Gambar 4.43 Grafik kecepatan terhadap torsi pada rangkaian paralel ketika baterai 20% ... 130 Gambar 4.44 Grafik kecepatan terhadap putaran pada rangkaian paralel ketika baterai 20% ... 131 Gambar 4.45 Grafik kecepatan terhadap torsi pada rangkaian paralel ketika baterai 10% ... 132 Gambar 4.46 Grafik kecepatan terhadap putaran pada rangkaian paralel ketika baterai 10% ... 133 Gambar 4.47 Grafik kecepatan terhadap torsi pada rangkaian paralel ketika mendekati 0 knot ... 134 Gambar 4.48 Grafik kecepatan terhadap putaran pada rangkaian paralel ketika mendekati 0 knot ... 135 Gambar 4.49 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian seri ketika baterai penuh ... 136 Gambar 4..50 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian paralel ketika baterai penuh . 136 Gambar 4.51 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian seri ketika baterai 90% ... 137 Gambar 4.52 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian paralel ketika baterai 90% .... 138 Gambar 4.53 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian seri ketika baterai 80% ... 139 Gambar 4.54 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian paralel ketika baterai 80% .... 139 Gambar 4.55 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian seri ketika baterai 70% ... 140
xxiv
Gambar 4.57 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian seri ketika baterai 60% ... 142 Gambar 4.58 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian paralel ketika baterai 60% .... 142 Gambar 4.59 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian seri ketika baterai 50% ... 143 Gambar 4.60 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian paralel ketika baterai 50% .... 144 Gambar 4.61 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian seri ketika baterai 40% ... 145 Gambar 4.62 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian paralel ketika baterai 40% .... 145 Gambar 4.63 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian seri ketika baterai 30% ... 146 Gambar 4.64 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian paralel ketika baterai 30% .... 147 Gambar 4.65 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian seri ketika baterai 20% ... 148 Gambar 4.66 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian paralel ketika baterai 20% .... 148 Gambar 4.67 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian seri ketika baterai 10% ... 149 Gambar 4.68 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian paralel ketika baterai 10% .... 150 Gambar 4.69 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian seri ketika kecepatan mendekati 0 knot ... 151
xxv
Gambar 4.70 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian paralel ketika kecepatan mendekati 0 knot ... 151 Gambar 4.71 Grafik torsi terhadap efisiensi pada rangkaian seri dan paralel ketika baterai penuh ... 178 Gambar 4.72 Grafik torsi terhadap efisiensi pada rangkaian seri dan paralel ketika baterai 90% ... 179 Gambar 4.73 Grafik torsi terhadap efisiensi pada rangkaian seri dan paralel ketika baterai 80% ... 180 Gambar 4.74 Grafik torsi terhadap efisiensi pada rangkaian seri dan paralel ketika baterai 70% ... 181 Gambar 4.75 Grafik torsi terhadap efisiensi pada rangkaian seri dan paralel ketika baterai 60% ... 182 Gambar 4.76 Grafik torsi terhadap efisiensi pada rangkaian seri dan paralel ketika baterai 50% ... 183 Gambar 4.77 Grafik torsi terhadap efisiensi pada rangkaian seri dan paralel ketika baterai 40% ... 185 Gambar 4.78 Grafik torsi terhadap efisiensi pada rangkaian seri dan paralel ketika baterai 30% ... 186 Gambar 4.79 Grafik torsi terhadap efisiensi pada rangkaian seri dan paralel ketika baterai 20% ... 187 Gambar 4.80 Grafik torsi terhadap efisiensi pada rangkaian seri dan paralel ketika baterai 10% ... 188 Gambar 4.81 Grafik torsi terhadap efisiensi pada rangkaian seri dan paralel ketika mendekati 0 knot ... 189 Gambar 4.82 Rangkaian sistem propulsi wahana benam ... 190 Gambar 4.83 Rangkaian seri dengan memakai DC-DC Converter ketika beban statis di Simulink ... 191 Gambar 4.84 Rangkaian seri dengan memakai DC-DC Converter ketika beban dinamis di Simulink ... 192
xxvi
Gambar 4.86 Rangkaian paralel dengan memakai DC-DC Converter ketika beban dinamis di Simulink ... 194 Gambar 4.87 Grafik kecepatan terhadap torsi pada rangkaian seri DC-DC Converter ketika baterai penuh 100% ... 208 Gambar 4.88 Grafik kecepatan terhadap putaran pada rangkaian seri DC-DC Converter ketika baterai penuh 100% ... 208 Gambar 4.89 Grafik kecepatan terhadap torsi pada rangkaian seri DC-DC Converter ketika baterai 70% .. 209 Gambar 4.90 Grafik kecepatan terhadap putaran pada rangkaian seri DC-DC Converter ketika baterai 70% .. 210 Gambar 4.91 Grafik kecepatan terhadap torsi pada rangkaian seri DC-DC Converter ketika baterai 10% .. 211 Gambar 4.92 Grafik kecepatan terhadap putaran pada rangkaian seri DC-DC Converter ketika baterai 10% .. 212 Gambar 4.93 Grafik kecepatan terhadap torsi pada rangkaian paralel DC-DC Converter ketika baterai penuh 100% ... 213 Gambar 4.94 Grafik kecepatan terhadap putaran pada rangkaian paralel DC-DC Converter ketika baterai penuh 100% ... 214 Gambar 4.95 Grafik kecepatan terhadap torsi pada rangkaian paralel DC-DC Converter ketika baterai 70%
... 215 Gambar 4.96 Grafik kecepatan terhadap putaran pada rangkaian paralel DC-DC Converter ketika baterai 70%
... 216
xxvii
Gambar 4.97 Grafik kecepatan terhadap torsi pada rangkaian paralel DC-DC Converter ketika baterai 10%
... 217 Gambar 4.98 Grafik kecepatan terhadap putaran pada rangkaian paralel DC-DC Converter ketika baterai 10%
... 218 Gambar 4.99 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian seri DC-DC Converter ketika baterai penuh 100% ... 219 Gambar 4.100 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian paralel DC-DC Converter ketika baterai penuh 100% ... 219 Gambar 4.101 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian seri DC-DC Converter ketika baterai 70% ... 220 Gambar 4.102 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian paralel DC-DC Converter ketika baterai 70% ... 221 Gambar 4.103 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian seri DC-DC Converter ketika baterai 10% ... 222 Gambar 4.104 Grafik hubungan antara putaran dengan torsi dan daya pada rangkaian paralel DC-DC Converter ketika baterai 10% ... 222 Gambar 4.105 Grafik torsi terhadap kecepatan pada rangkaian seri yang memakai dan tidak memakai converter ketika baterai penuh 100% ... 223 Gambar 4.106 Grafik torsi terhadap putaran pada rangkaian seri yang memakai dan tidak memakai converter ketika baterai penuh 100% ... 224
xxviii
ketika baterai 70% ... 224 Gambar 4.108 Grafik torsi terhadap putaran pada rangkaian seri yang memakai dan tidak memakai converter ketika baterai 70% ... 225 Gambar 4.109 Grafik torsi terhadap kecepatan pada rangkaian seri yang memakai dan tidak memakai converter ketika baterai 10% ... 225 Gambar 4.110 Grafik torsi terhadap putaran pada rangkaian seri yang memakai dan tidak memakai converter ketika baterai 10% ... 226 Gambar 4.111 Grafik torsi terhadap kecepatan pada rangkaian paralel yang memakai dan tidak memakai converter ketika baterai 100% ... 226 Gambar 4.112 Grafik torsi terhadap putaran pada rangkaian paralel yang memakai dan tidak memakai converter ketika baterai 100%... 227 Gambar 4.113 Grafik torsi terhadap kecepatan pada rangkaian paralel yang memakai dan tidak memakai converter ketika baterai 70% ... 227 Gambar 4.114 Grafik torsi terhadap putaran pada rangkaian paralel yang memakai dan tidak memakai converter ketika baterai 70% ... 228 Gambar 4.115 Grafik torsi terhadap kecepatan pada rangkaian paralel yang memakai dan tidak memakai converter ketika baterai 10% ... 228 Gambar 4.116 Grafik torsi terhadap putaran pada rangkaian paralel yang memakai dan tidak memakai converter ketika baterai 10% ... 229
xxix DAFTAR TABEL
Tabel 1 Kinematic velocity ... 9 Tabel 2 Tipe-tipe nilai Cr ... 10 Tabel 3 Tipe-tipe nilai Ct ... 10 Tabel 4 Kinemtic velocity ... 38 Tabel 5 Tipe-tipe nilai Cr ... 39 Tabel 6 Tipe-tipe nilai Ct ... 40 Tabel 7 Data putaran dan torsi pada rangkaian seri dari hasil simulasi ketika baterai penuh ... 43 Tabel 8 Data putaran dan torsi pada rangkaian seri dari hasil simulasi ketika beterai 90% ... 44 Tabel 9 Data putaran dan torsi pada rangkaian seri dari hasil simulasi ketika beterai 80% ... 45 Tabel 10 Data putaran dan torsi pada rangkaian seri dari hasil simulasi ketika beterai 70% ... 46 Tabel 11 Data putaran dan torsi pada rangkaian seri dari hasil simulasi ketika beterai 60% ... 47 Tabel 12 Data putaran dan torsi pada rangkaian seri dari hasil simulasi ketika beterai 50% ... 48 Tabel 13 Data putaran dan torsi pada rangkaian seri dari hasil simulasi ketika beterai 40% ... 49 Tabel 14 Data putaran dan torsi pada rangkaian seri dari hasil simulasi ketika beterai 30% ... 51 Tabel 15 Data putaran dan torsi pada rangkaian seri dari hasil simulasi ketika beterai 20% ... 52 Tabel 16 Data putaran dan torsi pada rangkaian seri dari hasil simulasi ketika beterai 10% ... 53 Tabel 17 Data putaran dan torsi pada rangkaian seri dari hasil simulasi ketika kecepatan mendekati 0 knot ... 54
xxx
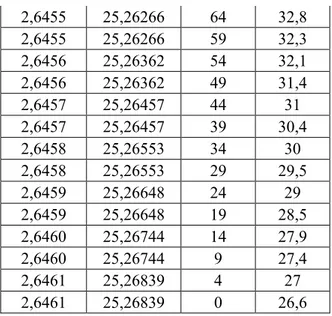
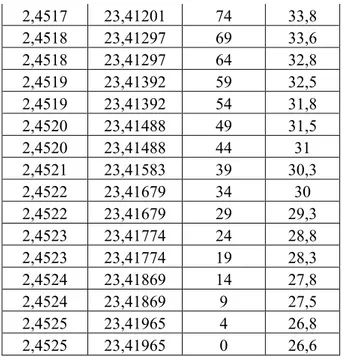
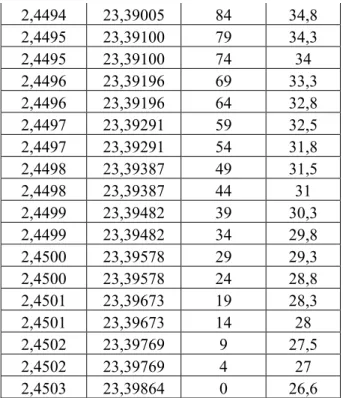
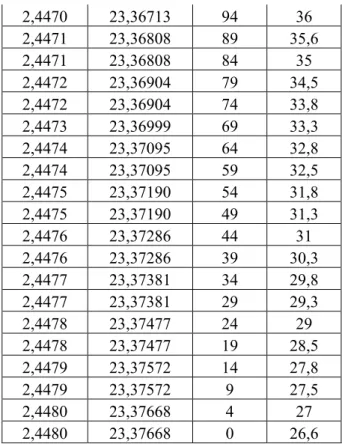
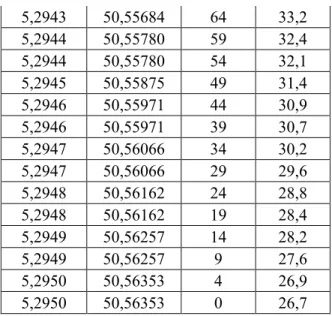
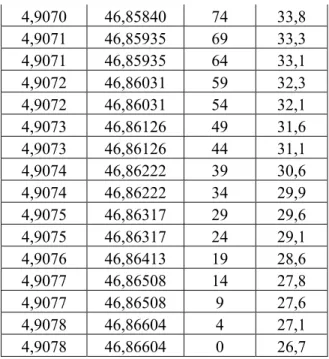
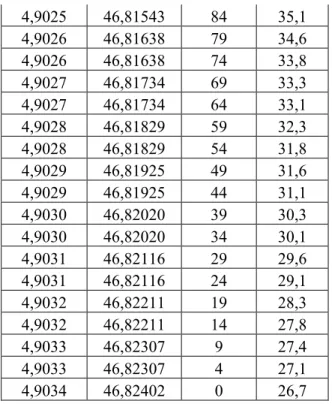
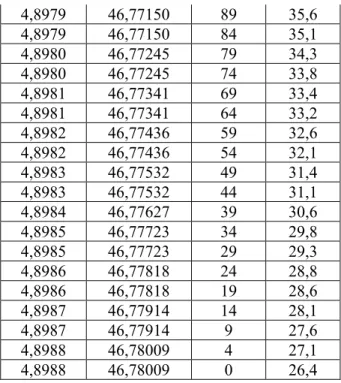
Tabel 19 Data putaran dan torsi pada rangkaian paralel dari hasil simulasi ketika baterai 90% ... 58 Tabel 20 Data putaran dan torsi pada rangkaian paralel dari hasil simulasi ketika baterai 80% ... 59 Tabel 21 Data putaran dan torsi pada rangkaian paralel dari hasil simulasi ketika baterai 70% ... 60 Tabel 22 Data putaran dan torsi pada rangkaian paralel dari hasil simulasi ketika baterai 60% ... 61 Tabel 23 Data putaran dan torsi pada rangkaian paralel dari hasil simulasi ketika baterai 50% ... 62 Tabel 24 Data putaran dan torsi pada rangkaian paralel dari hasil simulasi ketika baterai 40% ... 63 Tabel 25 Data putaran dan torsi pada rangkaian paralel dari hasil simulasi ketika baterai 30% ... 64 Tabel 26 Data putaran dan torsi pada rangkaian paralel dari hasil simulasi ketika baterai 20% ... 65 Tabel 27 Data putaran dan torsi pada rangkaian paralel dari hasil simulasi ketika baterai 10% ... 66 Tabel 28 Data putaran dan torsi pada rangkaian paralel dari hasil simulasi ketika kecepatan mendekati 0 knot ... 67 Tabel 29 Tabel nilai w dan t ... 69 Tabel 30 Perhitungan daya dan kecepatan pada rangkaian seri ketika baterai penuh ... 70 Tabel 31 Perhitungan daya dan kecepatan pada rangkaian seri ketika baterai 90% ... 71 Tabel 32 Perhitungan daya dan kecepatan pada rangkaian seri ketika baterai 80% ... 72
xxxi
Tabel 33 Perhitungan daya dan kecepatan pada rangkaian seri ketika baterai 70% ... 73 Tabel 34 Perhitungan daya dan kecepatan pada rangkaian seri ketika baterai 60% ... 74 Tabel 35 Perhitungan daya dan kecepatan pada rangkaian seri ketika baterai 50% ... 75 Tabel 36 Perhitungan daya dan kecepatan pada rangkaian seri ketika baterai 40% ... 76 Tabel 37 Perhitungan daya dan kecepatan pada rangkaian seri ketika baterai 30% ... 77 Tabel 38 Perhitungan daya dan kecepatan pada rangkaian seri ketika baterai 20% ... 78 Tabel 39 Perhitungan daya dan kecepatan pada rangkaian seri ketika baterai 10% ... 79 Tabel 40 Perhitungan daya dan kecepatan pada rangkaian seri ketika kecepatan mendekati 0 knot ... 80 Tabel 41 Perhitungan daya dan kecepatan pada rangkaian paralel ketika baterai penuh ... 81 Tabel 42 Perhitungan daya dan kecepatan pada rangkaian paralel ketika baterai 90% ... 82 Tabel 43 Perhitungan daya dan kecepatan pada rangkaian paralel ketika baterai 80% ... 83 Tabel 44 Perhitungan daya dan kecepatan pada rangkaian paralel ketika baterai 70% ... 84 Tabel 45 Perhitungan daya dan kecepatan pada rangkaian paralel ketika baterai 60% ... 85 Tabel 46 Perhitungan daya dan kecepatan pada rangkaian paralel ketika baterai 50% ... 86 Tabel 47 Perhitungan daya dan kecepatan pada rangkaian paralel ketika baterai 40% ... 87
xxxii
Tabel 49 Perhitungan daya dan kecepatan pada rangkaian paralel ketika baterai 20% ... 89 Tabel 50 Perhitungan daya dan kecepatan pada rangkaian paralel ketika baterai 10% ... 90 Tabel 51 Perhitungan daya dan kecepatan pada rangkaian paralel ketika kecepatan mendekati 0 knot ... 91 Tabel 52 Perhitungan efisiensi pada rangkaian seri ketika baterai penuh ... 154 Tabel 53 Perhitungan efisiensi pada rangkaian seri ketika baterai 90% ... 155 Tabel 54 Perhitungan efisiensi pada rangkaian seri ketika baterai 80% ... 156 Tabel 55 Perhitungan efisiensi pada rangkaian seri ketika baterai 70% ... 157 Tabel 56 Perhitungan efisiensi pada rangkaian seri ketika baterai 60% ... 158 Tabel 57 Perhitungan efisiensi pada rangkaian seri ketika baterai 50% ... 159 Tabel 58 Perhitungan efisiensi pada rangkaian seri ketika baterai 40% ... 160 Tabel 59 Perhitungan efisiensi pada rangkaian seri ketika baterai 30% ... 161 Tabel 60 Perhitungan efisiensi pada rangkaian seri ketika baterai 20% ... 162 Tabel 61 Perhitungan efisiensi pada rangkaian seri ketika baterai 10% ... 163 Tabel 62 Perhitungan efisiensi pada rangkaian seri ketika kecepatan mendekati 0 knot ... 164
xxxiii
Tabel 63 Perhitungan efisiensi pada rangkaian paralel ketika baterai penuh ... 167 Tabel 64 Perhitungan efisiensi pada rangkaian paralel ketika baterai 90% ... 168 Tabel 65 Perhitungan efisiensi pada rangkaian paralel ketika baterai 80% ... 169 Tabel 66 Perhitungan efisiensi pada rangkaian paralel ketika baterai 70% ... 170 Tabel 67 Perhitungan efisiensi pada rangkaian paralel ketika baterai 60% ... 171 Tabel 68 Perhitungan efisiensi pada rangkaian paralel ketika baterai 50% ... 172 Tabel 69 Perhitungan efisiensi pada rangkaian paralel ketika baterai 40% ... 173 Tabel 70 Perhitungan efisiensi pada rangkaian paralel ketika baterai 30% ... 174 Tabel 71 Perhitungan efisiensi pada rangkaian paralel ketika baterai 20% ... 175 Tabel 72 Perhitungan efisiensi pada rangkaian paralel ketika baterai 10% ... 176 Tabel 73 Perhitungan efisiensi pada rangkaian paralel ketika kecepatan mendekati 0 knot ... 177 Tabel 74 Data putaran dan torsi pada rangkaian seri DC- DC Converter dari hasil simulasi ketika beban statis ... 195 Tabel 75 Data putaran dan torsi pada rangkaian seri DC- DC Converter dari hasil simulasi ketika beban dinamis ... 196 Tabel 76 Data putaran dan torsi pada rangkaian paralel DC- DC Converter dari hasil simulasi ketika beban statis ... 197
xxxiv
... 198 Tabel 78 Data putaran dan torsi pada rangkaian seri DC- DC Converter dari hasil simulasi ketika baterai penuh 100% ... 199 Tabel 79 Data putaran dan torsi pada rangkaian seri DC- DC Converter dari hasil simulasi ketika baterai 70% ... 199 Tabel 80 Data putaran dan torsi pada rangkaian seri DC- DC Converter dari hasil simulasi ketika baterai 10% ... 200 Tabel 81 Data putaran dan torsi pada rangkaian paralel DC- DC Converter dari hasil simulasi ketika baterai penuh 100% ... 201 Tabel 82 Data putaran dan torsi pada rangkaian paralel DC- DC Converter dari hasil simulasi ketika baterai 70% ... 201 Tabel 83 Data putaran dan torsi pada rangkaian paralel DC- DC Converter dari hasil simulasi ketika baterai 10% ... 202 Tabel 84 Tabel nilai w dan t ... 204 Tabel 85 Perhitungan daya dan kecepatan pada rangkaian seri DC-DC Converter ketika baterai penuh 100%... 204 Tabel 86 Perhitungan daya dan kecepatan pada rangkaian seri DC-DC Converter ketika baterai 70% ... 205 Tabel 87 Perhitungan daya dan kecepatan pada rangkaian seri DC-DC Converter ketika baterai 10% ... 205 Tabel 88 Perhitungan daya dan kecepatan pada rangkaian paralel DC-DC Converter ketika baterai penuh 100% . 206 Tabel 89 Perhitungan daya dan kecepatan pada rangkaian paralel DC-DC Converter ketika baterai 70% ... 206 Tabel 90 Perhitungan daya dan kecepatan pada rangkaian paralel DC-DC Converter ketika baterai 10% ... 207
1 1.1. Latar Belakang
Sistem propulsi elektrik adalah sistem pada kapal yang menggunakan motor propulsion sebagai mesin penggerak menggantikan kinerja dari main engine.
Umumnya kapal menggunakan mesin diesel sebagai tenaga penggerak baling-baling atau propeler, namun penggunaan mesin diesel sebagai tenaga penggerak baling-baling memiliki beberapa permasalahan dan kelemahan yaitu mesin diesel tidak dapat beroperasi pada saat wahana benam sedang beroperasi di bawah permukaan air laut. Dalam aplikasinya motor DC dapat digunakan sebagai alternatif sistem penggerak propulsi pada submersible ship karena kecepatan putaran pada motor DC mudah diatur, tidak membutuhkan tempat yang terlalu luas dan motor DC tidak menimbulkan noise, sehingga diharapkan dapat mengatur kecepatan pada submersible ship.
Untuk mengatasi masalah tersebut diperlukan alternatif sebagai penggerak kapal. Alternatif tersebut menggunakan motor DC. Wahana benam menggunakan sistem propulsi elektrik dengan motor DC karena motor DC memiliki kelebihan pengaturan putaran yang mudah dilakukan dan tidak menimbulkan noise pada saat wahana benam sedang menyelam. Oleh sebab itu perlu dikaji untuk penggunaan motor DC sebagai sistem propulsi elektrik dengan cara disimulasikan menggunakan software MATLAB. Kemudian mencari hasil putaran,
arus jangkar, arus penguat motor, torsi yang dibutuhkan oleh sistem propulsi elektrik wahana benam. Tidak lupa juga menghitung berapa lama baterai yang bisa digunakan ketika wahana benam berada di bawah permukaan air laut. Diantara 2 rangkaian yang dirangkai secara seri dan paralel bisa diketahui rangkaian mana yang efisien untuk sistem tersebut dan fungsi rangkaian tersebut untuk wahana benam.
1.2. Perumusan Masalah
Rumusan masalah yang akan dibahas pada tugas akhir sebagai berikut:
a. Bagaimana karakteristik (torsi dan putaran) dan performa pada rangkaian motor DC yang dirangkai secara seri dan paralel pada sistem propulsi tersebut.
b. Bagaimana cara memilih rangkaian yang efisien untuk sistem propulsi tersebut.
c. Berapa lama baterai bisa digunakan pada saat wahana benam sedang berada di bawah permukaan air laut.
1.3. Batasan Masalah
Batasan masalah pada tugas akhir ini antara lain : 1. Rangkaian motor DC yang dirangkai seri dan
paralel sesuai dengan referensi yang sudah ada.
2. Analisa setiap rangkaian dibatasi hanya pada performance pada setiap rangkaian.
3. Tegangan yang digunakan untuk simulasi adalah 115 VDC
4. Simulasi menggunakan software MATLAB
1.4. Tujuan
Tujuan dari tugas akhir ini adalah:
1. Mendapatkan karakteristik (torsi dan putaran) dan performa pada rangkaian motor DC seri dan paralel pada sistem propulsi tersebut melalui simulasi menggunakan software MATLAB.
2. Untuk menentukan rangkaian yang efisien untuk sistem propulsi tersebut.
3. Mengetahui berapa lamanya baterai bisa digunakan pada saat wahana benam sedang berada di bawah permukaan air laut
1.5. Manfaat
Manfaat dari tugas akhir ini yaitu sebagai berikut : 1. Untuk pembelajaran dalam mengetahui performa dan karakteristik pada rangkaian motor DC sebagai sistem penggerak wahana benam.
2. Data performa dan karakteristik dari hasil simulasi bisa diterapkan sebagai sistem propulsi elektrik pada wahana benam.
“Halaman ini sengaja dikosongkan”
5 2.1. Wahana benam
2.1.1 Pengertian Wahana benam
Wahana benam merupakan kapal yang beroperasi di bawah permukaan air, pada umumnya banyak digunakan untuk kepentingan militer. Selain untuk kepentingan militer, wahana benam juga digunakan untuk ilmu pengetahuan bawah air.
Negara Jerman memiliki wahana benam yang disebut dengan U-Boat yang merupakan singkatan dari Unterseeboot yang ditugaskan dalam Perang Dunia I sebagai sistem persenjataan yang mematikan bagi Angkatan Laut musuh. Pada Perang Dunia II, wahana benam banyak digunakan oleh Jerman dan mendapatkan julukan U-Class. Tidak hanya Jerman, Uni Soviet atau Rusia juga negera yang menggunakan wahana benam sebagai kekuatan utama dalam Angkatan Laut.
Wahana benam dapat mengapung dengan mudah di permukaan air, mampu menyelam ke dasar samudera dan bertahan di dasar samudera hingga berbulan-bulan lamanya. Konstruksi pada dinding wahana benam yang membuat wahana benam bisa bertahan lama di dasar samudera.
Ruang-ruang kedap air (atau tangki pemberat) antara dinding luar dan dinding dalam dapat diisi dengan air laut sehingga meningkatkan bobot keseluruhan dan mengurangi kemampuan mengapungnya. Dengan dorongan baling-baling ke depan dan pengarahan bilah kemudi datar ke bawah, kapal itu akan menyelam.
Dinding dalam wahana benam terbuat dari baja yang mampu menahan tekanan dari luar pada saat wahana benam sedang berada di dasar samudera. Setelah wahana benam berada di dasar
samudera, wahana benam akan
mempertahanakan posisinya dengan bantuan tangki-tangki pemberat sepanjang lunasnya.
Untuk naik ke permukaan, wahana benam mengeluarkan air dari tangki pemberat. Periskop, radar, sonar, dan jaringan satelit merupakan alat navigasi utama wahana benam. Ketika mengapung di permukaan, sebuah wahana benam dapat dikatakan berdaya apung positif.
Tangki-tangki pemberatnya hampir tidak berisi air. Ketika menyelam, kapal memperoleh daya apung negatif karena udara di tangki pemberat dikeluarkan melalui katup udara untuk digantikan air yang masuk. Untuk melaju pada suatu kedalaman, wahana benam menggunakan suatu teknik penyeimbang yang disebut daya apung netral.
Untuk naik ke permukaan, udara bertekanan tersebut dipompakan masuk tangki pemberat, sehingga airnya keluar. Wahana benam yang paling canggih membuat air tawar sendiri dari air laut. Ada pula cadangan udara yang dihasilkan dengan elektrolisis, suatu proses yang membebaskan oksigen dari air tawar. Ketika berada dekat permukaan, wahana benam dapat mengambil udara dan melepaskan gas buang melalui snorkel tertutup yang membuka di atas muka air. Selain periskop, antena radio, dan tiang-tiang lainnya, beberapa snorkel menyembul di bangunan atas, atau menara komando. Udara dipantau setiap hari untuk
menjamin agar kadar oksigennya mencukupi.
Udara juga disalurkan lewat saringan yang menyaring segala kotoran. Gas buang keluar melalui pipa terpisah.
Gambar 2.1 Model Wahana benam (sumber : https://id.wikipedia.org)
2.1.2 Jenis-Jenis Wahana benam
Jenis-jenis wahana benam berdasarkan tenaga penggerak (sistem propulsi) adalah sebagai berikut :
a. Wahana benam diesel elektrik b. Wahana benam nuklir
c. Wahana benam engineless
Jenis-jenis wahana benam berdasarkan fungsinya adalah sebagai berikut :
a. Wahana benam militer b. Wahana benam non militer
Jenis-jenis wahana benam berdasarkan tipenya adalah sebagai berikut :
a. SSK : wahana benam bertenaga diesel b. SSN : wahana benam bertenaga nuklir c. SSBN : wahana benam nuklir membawa
rudal
balistik
d. SLBM : wahana benam peluncur rudal balistik
2.1.3 Tahanan Wahana benam
Tahanan digunakan untuk memprediksi kebutuhan daya yang dibutuhkan wahana benam agar bisa beroperasi. Untuk menghitung tahanan kapal menggunakan rumus :
RT = RBH + RAPP
Dimana :
RT = tahanan total RBH = tahanan bare hull RAPP = tahanan appendages
Untuk menghitung tahanan bare hull menggunakan rumus :
RBH = 1
2 ρAV2Ct
Dimana :
ρ = massa jenis fluida A = luas area wahana benam V = kecepatan wahana benam, ft/s Ct = nondimensional drag coefficient
Untuk menghitung nondimensional drag coefficient mnggunakan rumus :
Ct = Cf + ΔCf + Cr + Cw
Dimana :
Cf = koefisien tahanan gesek ΔCf = correlation allowance Cr = koefisien tahanan residual Cw = koefisien tahanan gelombang
Menurut ITTC untuk menghitung gaya gesek menggunkana rumus :
Cf = 0,075
(𝑙𝑜𝑔10 𝑅𝑒−2)2
Dimana Reynolds number dirumuskan : Re = 𝑉 𝑥 𝐿
Dimana : 𝑣
L = panjang wahana benam
v = kinematic viscosity dari air laut Tabel 1 Kinematic velocity Temperature,
℉
Density, lbs2/ft4
Kinemtic velocity, ft2/s
32 1,9947p -
34 1,9946 -
36 1,9944 -
38 1,9942 -
40 1,9940 -
42 1,9937 1,6588
44 1,9934 1,6035
46 1,9931 1,5531
48 1,9928 1,5053
50 1,9924 1,4599
52 1,9921 1,4168
54 1,9917 1,3758
56 1,9912 1,2268
58 1,9908 1,2996
60 1,9903 1,2641
62 1,9698 1,2303
64 1,9693 1,1979
66 1,9688 1,1669
68 1,9682 1,1372
70 1,9676 1,1088
72 1,9670 1,0816
74 1,9664 1,0554
76 1,9658 1, 0303
78 1,9651 1,0062
80 1,9644 0,09830
(Eugene Allmendinger.1990)
ΔCf memiliki nilai antara 0,0004 – 0,0009. Nilai koefisien tahanan gelombang ini bisa diabaikan.
Berikut tabel koefisien tahanan residual : Tabel 2 Tipe-tipe nilai Cr
Hull Form Cr x 103
Deep Quest 0,677
DSRV 0,435
Fleet Submersible 0,39
Albacone 0,1
(Eugene Allmendinger.1990)
Untuk menghitung tahanan appendage menggunakan rumus :
RAPP = 1
2 ρAV2Ct
Tabel 3 Tipe-tipe nilai Ct
Appandage Area Basic Ct
Small domes Profile 0,015
Antennae Projected 1,2
Cylinders Projected 1,2
Arms Wetted surface 0,005
Long faired protuberances
Wetted surface 0,005
Hole in skin Projected frontal 0,5 Planes Projected frontal 0,011
(Eugene Allmendinger.1990)
2.2. Sistem Propulsi Elektrik
Sistem propulsi elektrik adalah sistem propulsi pada kapal yang menggunakan motor propulsion sebagai mesin penggerak kapal. Keuntungan dalam penggunaan sistem propulsi elektrik adalah tempat yang dibutuhkan kecil, lebih ringan, dan tidak menimbulkan noise seperti mesin diesel. Namun untuk
propeler tertentu yang diputar dengan kecepatan dan putaran yang cukup tinggi, maka faktor suara tetap akan timbul. Karena mesin diesel membutuhkan perawatan yang ekstra, lebih mahal dan ukuran yang lebih besar, dan tidak cocok untuk kapal yang membutuhkan kecepatan tinggi, maka solusinya adalah menggunakan sistem propulsi elektrik.
Kebanyakan sistem penggerak tertutup, jumlah tenaga yang dihasilkan harus sesuai dengan jumlah tenaga yang dikeluarkan termasuk daya yang hilang.
Sedangkan pada sistem propulsi elektrik yang terdiri dari generator, distribusi sistem, termasuk distribusi transformer dan pengatur kecepatan, alur dayanya dapat dilihat pada gambar berikut :
Gambar 2.2 Power flow pada sistem propulsi elektrik (sumber : Alf Kare Adnanes, 2003)
Jadi efisiensi dari sistem propulsi dirumuskan sebagai berikut:
η = 𝑃𝑜𝑢𝑡
𝑃𝑖𝑛 = 𝑃𝑜𝑢𝑡
𝑃𝑜𝑢𝑡+𝑃𝑙𝑜𝑠𝑠𝑒𝑠
Pada tiap-tiap komponen, efisiensi elektrik dapat diperhitungkan dan nilai pada generator yaitu Ƞ = 0,999, pada transformer yaitu Ƞ = 0,99-0,995, frekuensi converter yaitu Ƞ = 0,98-0,99, dan pada motor listrik yaitu: Ƞ = 0,95-0,97. Sehingga efisiensi sistem diesel elektrik jika dihitung dari poros mesin diesel hingga ke poros motor listrik adalah berkisar antara 0,88 dan 0,92 pada saat full load. Efisiensi juga tergantung pada sistem pembebanan.
(Alf Kare Adnanes. 2003)
2.2.1 Motor DC dan AC Sebagai Penggerak Kapal Penggunaan motor arus searah sebagai pengganti mesin penggerak utama adalah dirasa baik dan menguntungkan. Motor arus searah banyak memiliki beberapa kelebihan antara lain;
efisiensi tinggi dan sistem pengaturan yang lebih mudah dibandingkan dengan motor arus bolak- balik. Motor arus searah bekerja pada kecepatan yang relatif konstan, untuk kecepatan berubah- ubah motor DC lebih banyak dipakai namun dengan berkembangnya teknologi semikonduktor dan bidang elektronika daya, pengaturan kecepatan motor DC akan sangat lebih mudah lagi dalam hal pengaturan dan efisiensi yang lebih tinggi dikarenakan pengurangan pemborosan daya lebih kecil dan pengaturan yang lebih halus.
Perkembangan prime mover untuk penggerak utama di kapal mengalami perkembangan yang sangat pesat sejak ditemukannya uap oleh J.
Watt, mesin diesel oleh Rudolf Diesel serta turbin gas oleh Brayton. Pada tahun-tahun awal berbagai penemuan mengenai ketiga prime mover hanya berkisar pada penyempurnaan
sistem kerja. Dan pada dewasa ini berbagai perkembangan menjurus pada penggunaan emisi gas buang. Pada mesin diesel pengaturan putaran dan pembalikan putaran sangat dimungkinkan.
Tetapi pada proses pembalikan putaran pada mesin diesel membutuhkan waktu yang relatif lebih lama jika ditinjau mulai dari putaran normal. Untuk turbin uap dan turbin gas pengaturan putaran mempunyai range yang sangat sempit dari putaran normal. Dan untuk membalikkan putaran pada kedua jenis prime mover tersebut sangatlah tidak mungkin.
Berdasarkan pada fakta diatas maka para engineer mengembangkan sistem yang merupakan gabungan dari ketiga prime mover tersebut dengan motor listrik yang selanjutnya disebut dengan electric propulsion. Pada sistem electric propulsion, ketiga prime mover menggerakkan generator dan selanjutnya generator mensuplai listrik yang digunakan untuk memutar motor listrik. Jenis motor listrik yang digunakan disesuaikan dengan tipe atau fungsi kapal tersebut. Pada umumnya kapal yang mempunyai kegunaan khusus yang menggunakan motor DC dan untuk kapal niaga yang berorientasi profit pada umumnya menggunakan motor AC. Misalnya untuk kapal pemecah es (ice breaker) menggunakan motor DC dalam hal ini dikarenakan torsi yang diperlukan propeller sangat besar.
(Muhammad Iqbal Said. 2013)
Gambar 2.3 Skema sistem propulsi konvensional dan sistem diesel electric propulsion (sumber : Muhammad Iqbal Said, 2013)
2.3. Motor DC
2.3.1 Pengertian Motor DC
Motor DC adalah adalah motor yang mengubah tenaga listrik DC menjadi tenaga gerak atau mekanik yang berupa putaran pada rotor. Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor dc berada di stator (bagian yang tidak berputar) dan kumparan jangkar berada di rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik.
Prinsip kerja dari arus searah adalah membalik fasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen.
Gambar 2.4 Motor DC (sumber : http://staff.ui.ac.id)
2.3.2 Bagian-Bagian Motor DC
Bagian-bagian motor DC adalah :
1. Stator adalah rumah dari motor yang diam sebagai tempat kedudukan kumparan medan.
2. Kumparan medan adalah bagian yang membangkitkan medan magnet dapat berupa medan magnet permanen maupun lilitan konduktor.
3. Rotor adalah poros yang berputar di dalam stator sebagai tempat kedudukan kumparan jangkar.
4. Kumparan jangkar adalah bagian yang dialiri arus untuk mendapatkan efek induksi elektromagnetik.
5. Brushes adalah bagian pada stator yang berhubungan dengan sumber tegangan di luar motor dan berkontak dengan komutator pada rotor sehingga memungkinkan adanya arus listrik pada jangkar.
(Sardono Sarwito.2006)
Gambar 2.5 Bagian-bagian motor DC (Sumber : http://staff.ui.ac.id)
2.3.3 Cara Kerja Motor DC
Jika arus melewati suatu konduktor, maka akan timbul medan magnet di sekitar konduktor.
Arah medan magnet ditentukan oleh aliran arus pada konduktor.
Gambar 2.6 Medan magnet yang membawa arus mengelilingi konduktor
(sumber : http://staff.ui.ac.id)
Aturan genggaman tangan kanan bisa dipakai untuk menentukan arah garis fluks di sekitar konduktor. Genggam konduktor dengan tangan kanan dengan jempol mengarah pada arah aliran arus, maka jari-jari anda akan menunjukkan arah garis fluks. Medan magnet hanya terjadi di sekitar konduktor jika ada arus yang mengalir pada konduktor tersebut. Pada motor listrik konduktor berbentuk U disebut angker dinamo.
Gambar 2.7 Medan magnet yang menghalangi konduktor
(sumber : http://staff.ui.ac.id)
Jika konduktor berbentuk U diletakkan di antara kutub utara dan selatan yang kuat medan magnet konduktor akan berinteraksi dengan medan magnet kutub.
Gambar 2.8 Reaksi garis fluks (sumber : http://staff.ui.ac.id)
Lingkaran bertanda A dan B merupakan ujung konduktor yang dilengkungkan (looped conductor). Arus mengalir masuk melalui ujung A dan keluar melalui ujung B. Medan konduktor A yang searah jarum jam akan menambah medan pada kutub dan menimbulkan medan yang kuat di bawah konduktor. Konduktor akan berusaha bergerak ke atas untuk keluar dari medan kuat ini.
Medan konduktor B yang berlawanan arah jarum jam akan menambah medan pada kutub dan menimbulkan medan yang kuat di atas konduktor. Konduktor akan berusaha untuk bergerak turun agar keluar dari medan yang kuat
tersebut. Gaya-gaya tersebut akan membuat angker dinamo berputar searah jarum jam.
Mekanisme kerja untuk seluruh jenis motor secara umum :
Arus listrik dalam medan magnet akan memberikan gaya.
Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran / loop, maka kedua sisi loop, yaitu pada sudut kanan medan magnet, akan mendapatkan gaya pada arah yang berlawanan.
Pasangan gaya menghasilkan tenaga putar / torsi untuk memutar kumparan.
Motor memiliki beberapa loop pada dinamonya untuk memberikan tenaga putaran yang lebih seragam dan medan magnet yang dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan.
Pada motor DC, daerah kumparan medan yang dialiri arus listrik akan menghasilkan medan magnet yang melingkupi kumparan jangkar dengan arah tertentu. Perubahan dari energi listrik menjadi energi mekanik (motor) maupun sebaliknya berlangsung melalui medan magnet, dengan demikian medan magnet disini selain berfungsi sebagai tempat untuk menyimpan energi, sekaligus sebagai tempat berlangsungnya proses perubahan energi, daerah tersebut dapat dilihat pada gambar di bawah ini :
Gambar 2.9 Prinsip kerja motor DC (sumber : http://staff.ui.ac.id)
Agar proses perubahan energi mekanik dapat berlangsung secara sempurna, maka tegangan sumber harus lebih besar daripada tegangan gerak yang disebabkan reaksi lawan.
Dengan memberi arus pada kumparan jangkar yang dilindungi oleh medan maka menimbulkan perputaran pada motor. Beban dalam hal ini mengacu kepada keluaran tenaga putar / torsi sesuai dengan kecepatan yang diperlukan. Beban umumnya dapat dikategorikan ke dalam tiga kelompok :
Beban torsi konstan adalah beban dimana permintaan keluaran energinya bervariasi dengan kecepatan operasinya namun torsinya tidak bervariasi. Contoh beban dengan torsi konstan adalah corveyors dan rotary kilns.
Beban dengan variabel torsi adalah beban dengan torsi yang bervariasi dengan kecepatan operasi. Contoh beban dengan torsi yang bervariasi adalah pompa sentrifugal dan fan serta untuk peralatan energi listrik adalah motor listrik.
Beban dengan energi konstan adalah beban dengan permintaan torsi yang berubah dan berbanding terbalik dengan kecepatan.
Contoh untuk beban dengan daya konstan adalah peralatan-peralatan mesin.
2.3.4 Jenis-Jenis Motor DC
Jenis-jenis motor DC adalah sebagai berikut : 1. Separately Excited (penguat terpisah)
Motor DC penguat terpisah atau separately excited disuplai oleh dua sumber tegangan berbeda (Vt dan Vf) pada masing-masing kumparan, yaitu kumparan jangkar dan kumparan medan.
Vf = If.Rf Vt = Ea + Ia.Ra Ea = C.n.ɸ
Gambar 2.10 Rangkaian motor DC penguat terpisah
(sumber : https://www.linkedin.com)
2. Self Excited (penguat sendiri)
Motor DC penguat sendiri atau self excited disuplai oleh satu sumber tegangan (Vt=
tegangan terminal) pada kedua kumparannya, kumparan jangkar dan kumparan medan. Motor DC penguat sendiri dibagi menjadi 3 tipe berbeda berdasarkan rangkaian, antara lain:
1. Motor DC Shunt
Ialah motor DC dengan kumparan penguat yang dihubungkan secara paralel dengan kumparan jangkar.
Vf = Vt Vt = Ish.Rsh Vt = Ea + Ia.Ra Ea = C.n.ɸ
Gambar 2.11 Rangkaian motor DC shunt (sumber : https://www.linkedin.com)
Gambar 2.12 Grafik torsi motor DC shunt (sumber : https://www.linkedin.com)
2. Motor DC Seri
Ialah motor DC yang memiliki hubungan seri antara kumparan jangkar dengan kumparan penguat.
Is = IL = Ia Vs = Is = Rs
Vt = Ea +Ia.Ra + Ia.Rs Ea = C.n.ɸ
Gambar 2.13 Rangkaian motor DC seri (sumber : https://www.linkedin.com)
Gambar 2.14 Grafik motor DC seri (sumber : https://www.linkedin.com)
3. Motor DC Compound
Motor DC Compound atau campuran memiliki dua tipe berbeda, yaitu Motor DC Long Compound dan Motor DC Short Compound. Pada motor DC tipe ini, memiliki kumparan penguat yang dililitkan seri dan paralel.
Motor DC Short Compound IL = Ish + Ia
IL = Is Vsh = Ish.Rsh Vs = Is.Rs = IL.Rs Vsh = Ea + Ia.Ra Ea = C.n.ɸ Vt = Vsh + Vs
Vt = Is.Rs + Ea + Ia.Ra
Gambar 2.15 Rangkaian motor DC short compound
(sumber : https://www.linkedin.com)
Motor DC Long Compound IL = Ish + Ia
Ia = Is Vsh = Ish.Rsh Vsh = Vt
Vs = Is.Rs = Ia.Rs Vt = Ea + Ia.Ra +Vs Vt = Ea + Ia.Ra + Ia.Rs Ea = C.n.ɸ
Gambar 2.16 Rangkaian motor DC long compound
(sumber : https://www.linkedin.com)
Gambar 2.17 Grafik motor DC compound (sumber : https://www.linkedin.com)
2.3.5 Karakteristik Motor DC
Karakteristik motor DC dibagi menjadi beberapa hubungan :
a. Torsi dan arus jangkar, yaitu karakteristik T/Ia yang biasanya disebut dengan karakteristik listrik.
Gambar 2.18 Karakteristik T/Ia
(sumber : http://repository.usu.ac.id, 2011)
b. Kecepatan dan arus jangkar, yaitu karakteristik N/Ia.
Gambar 2.19 Karakteristik N/Ia
(sumber : http://repository.usu.ac.id, 2011)
c. Kecepatan dan torsi yaitu karakteristik N/T yang disebut dengan karateristik mekanis.
Gambar 2.20 Karakteristik N/T
(sumber : http://repository.usu.ac.id, 2011)
2.3.6 Prinsip Arah Putaran pada Motor DC
Untuk menentukan arah putaran motor digunakan kaedah Flamming tangan kiri. Kutub- kutub magnet akan menghasilkan medan magnet dengan arah dari kutub utara ke kutub selatan. Jika medan magnet memotong sebuah kawat penghantar yang dialiri arus searah dengan empat jari, maka akan timbul gerak searah ibu jari. Gaya ini disebut gaya Lorentz, yang besarnya sama dengan F. Prinsip motor adalah aliran arus di dalam penghantar yang berada di dalam pengaruh medan magnet akan menghasilkan gerakan.
Besarnya gaya pada penghantar akan bertambah besar jika arus yang melalui penghantar bertambah besar.
Gambar 2.21 Gaya Lorentz
(sumber : http://repository.usu.ac.id, 2011)
Ibu jari : menunjukkan arah arus listrik.
Jari tengah : menunjukkan arah gaya Lorentz Jari telunjuk : menunjukkan arah medan magnet.
Besarnya gaya Lorentz yang timbul adalah sebagai berikut:
F = B . I . L
Dimana:
F : gaya Lorentz yang dialami penghantar(N) I : besar arus pada penghantar(A)
L : panjang sisi kumparan
B : kerapatan fluks (WB/m2) = Φ/A Φ : fluks total (Weber)
A : luas medan magnet (m2)
2.3.7 Pengaturan Putaran pada Motor DC Dari rumus umum motor DC, didapatkan : Vt = Ea + Ia.Ra
Ea = C.n.ɸ Ea = Vt – Ia.Ra C.n.ɸ = Vt – Ia.Ra n = (Vt-Ia.Ra)/(C.ɸ)
Sehingga, untuk mengatur putaran dari motor DC dapat menggunakan tiga macam cara, antara lain:
a. Pengaturan medan
Pengaturan medan pada motor DC ialah dengan menambahkan kumparan (variable resistance) yang dihubungkan seri dengan kumparan medan. Pengaturan putaran motor DC dengan mengatur medan magnet memiliki karakteristik antara lain:
Kecepatan minimum dari motor dapat diperoleh ketika variable resistance mendekati nol atau sama dengan nol.
Kecepatan maksimum pada motor DC dibatasi oleh kapasitas maksimum dari gaya sentrifugal pada poros motor DC.
Memiliki heat losses yang rendah.
Mudah dan sederhana dalam pengaplikasian rangkaiannya.
Hanya dapat diaplikasikan pada tipe motor DC shunt dan motor DC long compound.
Range putaran nominal ke atas, nilai putaran terendah berada pada putaran nominal.
Putaran dibatasi oleh kekuatan poros.
Gambar 2.22 Rangkaian motor DC dengan pengaturan medan
(sumber : https://www.scribd.com)
b. Pengaturan arus jangkar
Pada pengaturan arus jangkar, variabel rheostadt dihubungkan seri dengan kumparan jangkar, sehingga hasil dari Ia.Ra dapat diatur.
Dengan mengatur hasil dari Ia.Ra maka kecepatan motor dapat ditentukan. Namun,
pengaturan motor DC dengan metode ini sangat jarang digunakan karena dapat meningkatkan heat losses pada variabel resistance. Pada pengaturan arus jangkar, nilai putaran tertinggi berada pada putaran nominal.
Kelemahan dari penggunaan metode ini ialah dapat menghasilkan heat losses yang tinggi.
Gambar 2.23 Rangkaian motor DC dengan pengaturan arus jangkar
(sumber : https://www.scribd.com)
c. Pengaturan tegangan (Ward-Leonard)
Pengaturan motor DC dengan mengatur tegangan menggunakan metode Ward- Leonard. Pengaturan jenis ini biasa digunakan pada industri yang memiliki proses penggulungan (rolling process) seperti, industri kertas, industri plat baja, dll. Dengan beberapa modifikasi, metode ini dapat diaplikasikan di kapal khususnya pada sistem propulsi listrik di kapal.
Karakteristik dari pengaturan putaran motor DC dengan metode Ward-Leonard antara lain:
Input atau masukan dari generator memiliki kecepatan yang konstan, yang disuplai oleh motor induksi.
Tegangan output dari generator DC ialah tegangan input pada motor DC sehingga dapat diatur.
Kegunaan dari variabel resistance pada generator DC ialah sebagai pengendali atau pengatur tegangan output dari generator DC.
Pengaturan arus medan pada motor DC bertujuan untuk mengatur torsi pada motor DC.
Kekurangan dari metode Ward-Leonard ialah biaya yang dibutuhkan lebih tinggi jika dibandingkan dengan metode pengaturan putaran yang lain.
Kontrol putaran sangat halus, dimulai saat n=0 hingga putaran mencapai putaran nominal.
Gambar 2.24 Rangkaian motor DC dengan pengaturan tegangan
(sumber : https://www.scribd.com)
2.3.8 Torsi dan Torsi Poros
Torsi yang dihasilkan motor DC bergantung dari 3 faktor yaitu :
a. Fluks, Φ b. Arus jangkar, Ia c. Konstanta, C
Sehingga dapat dirumuskan : T = C.Ia.Φ
Keseluruhan torsi dari jangkar, sebagaimana yang dihitung diatas tidak terpakai untuk melakukan kerja seluruhnya. Sebab adanya kerugian tenaga dalam motor DC yaitu rugi-rugi besi dan gesekan. Torsi yang benar-benar digunakan untuk kerja adalah torsi poros. Horse power (HP) yang dihasilan oleh torsi poros disebut brake house power (BHP) daya kuda rem sebab merupakan HP yang dipakai pada saat rem.
BHP = (Tsh x 2πN)/(735,5)
Tsh = (735,5 x BHP)/2πN 1 HP = 735,3 watt T – Tsh disebut torsi hilang (lost torque).
Torsi hilang = 0,159 x (rugi-rugi besi dan gesekan)/N dalam satuan Nw-m = 0,0162 x (rugi-rugi besi dan gesekan)/N dalam satuan kg-m
2.3.9 Rangkaian Motor DC untuk Sistem Propulsi Wahana benam
Gambar 2.25 Rangkaian seri motor DC yang akan disimulasikan
Gambar 2.26 Rangkaian paralel motor DC yang akan disimulasikan
Data motor listrik DC adalah sebagai berikut : Jumlah : 1 buah
Type : DC motor shunt 380 Volt DC Daya : 2 x 1850 kW pada 200 rpm Konstruksi : dibuat dobel jangkar
Data baterai adalah sebagai berikut : Jumlah : 480 cell, dibagi 4 group Tegangan : 2 Volt / Cell
Kapasitas : 10260 AH
Dimensi : (1421 x 290 x 450) mm3 Berat : 525 + 2 kg
Data wahana benam yang akan dijadikan objek simulasi sistem propulsi elektrik adalah sebagai berikut :
Panjang keseluruhan : 59,57 m Diameter dalam kapal : 6,20 m Tinggi sarat air : 5,50 m Tinggi seluruhnya : 11,34 m Displacement menyelam : 1390 m3 Kedalaman menyelam : 250 m Kec. Waktu menyelam : 21, 5 knot
Jarak jelajah : 22 NM
2.4. Pemograman MATLAB
MATLAB (Matrix Laboratory) adalah sebuah lingkungan komputasi numerikal dan bahasa pemrograman komputer generasi keempat.
Dikembangkan oleh The MathWorks, MATLAB memungkinkan manipulasi matriks, pemplotan fungsi dan data, implementasi algoritma, pembuatan antarmuka pengguna, dan pengantarmukaan dengan program dalam bahasa lainnya. Meskipun hanya bernuansa numerik, sebuah toolbox yang
menggunakan mesin simbolik MuPAD, memungkinkan akses terhadap kemampuan aljabar komputer. Sebuah paket tambahan, Simulink, menambahkan simulasi grafis multiranah dan Desain Berdasar Model.
Gambar 2.27 Logo MATLAB (sumber : https://id.wikipedia.org)
Simulink merupakan bagian tambahan dari software MATLAB (Mathworks Inc.). Simulink dapat digunakan sebagai sarana pemodelan, simulasi dan analisis dari sistem dinamik dengan menggunakan antarmuka grafis (GUI). Simulink terdiri dari beberapa kumpulan toolbox yang dapat digunakan untuk analisis sistem linier dan non linier. Beberapa library yang sering digunakan dalam sistem kontrol antara lain math, sinks, dan sources.
Gambar 2.28 Simulink model turbin (sumber : https://id.wikipedia.org)
33 3.1 Umum
Metodologi tugas akhir adalah urutan pengerjaan tugas akhir yang dilakukan sejak dimulainya pengerjaan hingga akhir. Pengerjaan tugas akhir ini membutuhkan data-data yang nyata untuk mencocokan validasi hasil simulasi. Metodologi penelitian ini dimulai dari mengidentifikasi masalah, menentukan rangkaian motor DC yang akan disimulasikan, studi literatur, melakukan simulasi, menganalisa hasil simulasi dan terakhir kesimpulan dan saran.
3.1.1. Identifikasi dan Perumusan masalah Pada tahap ini menentukan apa yang akan diangkat dan dibahas pada tugas akhir.
Kemudian merumuskan masalah apa saja yang akan dibahas pada tugas akhir ini. Pada tugas akhir ini membahas tentang performance propulsi listrik pada wahana benam dengan cara mensimulasikan menggunakan MATLAB.
3.1.2. Penentuan Data Variasi Rangkaian Motor DC
Pada tahap ini menentukan rangkaian motor DC baik seri maupun paralel yang didapat dari penelitian sebelumnya kemudian akan disimulasikan menggunakan MATLAB.
Data tersebut yang akan mendukung untuk proses simulasi.
3.1.3. Studi Literatur
Pada tahap ini, mencari bahan-bahan yang mendukung untuk proses pengerjaan tugas akhir. Bahan yang dicari berhubungan dengan teori motor DC, teori tahanan
wahana benam. Bahan-bahan dapat berasal dari buku, jurnal, dan internet.
3.1.4. Menghitung Tahanan Wahana benam Pada tahap ini melakukan perhitungan tahanan wahana benam yang akan digunakan untuk menghitung daya yang dibutuhkan wahana benam.
3.1.5. Menghitung Torsi yang Dibutuhkan Wahana benam
Pada tahap ini setelah daya diketahui maka menghitung nilai torsi yang dibutuhkan kapal dan akan menjadi beban (load) ketika proses simulasi.
3.1.6. Membuat Rangkaian di Simulink MATLAB
Pada tahap ini mulai dilakukannya pembuatan rangkaian motor DC baik yang rangkaian seri maupun paralel.
3.1.7. Melakukan Simulasi dengan menggunakan MATLAB
Pada tahap ini, baik rangkaian motor DC yang dirangkai seri maupun paralel akan disimulasikan menggunakan Simulink MATLAB.
3.1.8. Validasi
Pada tahap ini diperoleh hasil simulasi yang kemudian divalidasi dengan data yang diperoleh dari penelitian sebelumnya.
3.1.9. Analisa Hasil Simulasi
Dari hasil simulasi baik rangkaian seri dan paralel diambil datanya untuk dianalisa torsi, putaran, performance dan efisiensi.
3.1.10. Analisa dan Pembahasan
Kemudian hasil pada tahap ini berupa grafik dan kemudian menyimpulkan semua grafik